ABSTRACT
We describe the design and fabrication of a three-axis force sensor with parallel plate beams (PPBs) for measuring the force of a patient’s thigh in a wearable walking robot. The thigh link three-axis force sensor is composed of Fx force sensor, Fy force sensor, Fz force sensor and a pulley, which detect the x, y and z direction forces, respectively. The three-axis force sensor was designed using the Finite Element Method (FEM), and manufactured using strain-gages. Experiments to evaluate the characteristics of the three-axis force sensor were carried out. The results of the characteristics experiment indicate that the repeatability error and the non-linearity of the three-axis force sensor was less than 0.04%, and the results for calibration showed that the errors of the sensor was less than 0.1%. Therefore, the fabricated thigh link three-axis force sensor can be used to measure the patient’s thigh force of the wearable walking robot.
-
KEYWORDS: Strain gage, Rated output, No-linearity error, Repeatability error, Three-axis force sensor
-
KEYWORDS: 스트레인게이지, 정격출력, 비직선성오차, 재현도오차, 3축 힘센서
1. 서론
사람은 후천적으로 사고, 뇌의 이상 등에 의해 다리가 정상적으로 동작되지 않아 재활운동 등을 통해 재활을 해야 하고, 재활을 했는데도 정상대로 움직일 수 없는 경우가 많다. 이와 같은 다리환자는 재활운동을 받을 때에는 물리치료사의 도움을 받는다. 최근 환자들이 급속히 늘어나는 추세에 있어 물리치료사의 도움을 받기가 어려운 경우가 있다. 부족한 물리치료사를 대신하는 기계장치가 착용용 보행로봇이다. 착용용 보행로봇은 보행재활운동이나 다리가 불편한 환자의 보행을 돕는 역할을 하고, 현재까지 많은 연구가 진행되었다. 착용용 보행로봇
1은 발목관절, 무릎관절, 고관절을 회전 할 수 있도록 설계하였고, 보행의 궤적에 따라 위치제어를 실시하였다. 착용용 보행로봇
2 은 보행 시 허벅지와 종아리에 착용하여 무릎관절에 회전력을 보강할 수 있도록 설계하였고, 단순하게 위치 제어할 수 있으며, 무릎관절 환자에게 작용할 수 있다. 착용용 보행로봇
3은 무릎관절과 고관절에 회전력을 가할 수 있도록 설계되었고, 사람의 보행궤적을 따라 동작될 수 있도록 위치 제어한다. 그리고 실험에 의해 두 관절의 토크를 측정하였다. 착용용 보행로봇
4은 재활을 위한 환자가 로봇을 착용하고 안전기구에 몸을 의지한 후 무릎관절과 고관절 운동을 도와줄 수 있도록 설계하였다. 착용용 보행로봇
5은 환자의 몸을 안전하게 줄로 고정하고 다리부분을 줄로 연결하여 당김으로서 보행할 수 있도록 설계되었다. 착용용 보행로봇
6은 실린더와 램을 이용하여 뒤꿈치 부분을 밀고 당기는 구조로 발목관절에만 회전력을 줄 수 있도록 설계되었다.
현재까지 개발된 착용용 보행로봇은 대부분 무릎관절, 발목관절에 직접 모터가 부착되었고, 이 모터의 무게로 인해 고관절의 모터는 매우 무거워지는 경향이 있다. 이와 같은 문제를 해결하기 위해 허리부분에 각 관절 모터를 장착하고 줄을 이용하여 로봇의 각 관절에 회전력을 가하는 방법이 있다. 이와 같은 구조의 착용용 보행로봇은 Fx힘센서를 이용하여 보행시 로봇이 환자의 다리를 들어 올릴 때의 무게를 측정하여 정상대로 제어되는지를 확인하고, Fy힘센서를 이용하여 환자의 다리가 지면과 접촉하였을 때 다리의 안쪽 혹은 바깥쪽으로 밀리는 힘을 측정하여 상황에 대처하는 제어를 실시해야하며, Fz힘센서를 이용하여 발바닥이 지면에 접촉되었는지를 감지하여 발이 지면과 접촉되었는지 떨어졌는 지를 감지하여 보행을 안전하게 제어한다. 한쪽 다리가 불편한 다리환자는 스스로 감지하지 못하기 때문에 안전한 제어를 위해서는 3개 방향의 힘을 측정해야 한다. 3개의 센서를 각각 사용하면 부피가 커져 로봇에 부착할 수 없으므로 하나의 몸체에 3개의 센서가 설계 및 제작된 다축 힘센서가 필요하다.
산업현장에서 사용될 수 있는 다축 힘센서는 이미 많이 개발되어 사용되고 있다. 6축 힘센서
7는 단순지지보를 이용하여 설계되었고, Fx힘센서와 Fy힘센서의 정격하중이 각각 20 kgf, Fz힘선서는 40 kgf, Mx센서, My센서, Mz센서의 정격하중이 각각 100 kgfcm이었으며, 센서의 크기가 140 mm × 140 mm × 90 mm이었다. 2축 힘센서
8은 무릎관절 재활을 위한 재활로봇에 가해지는 힘을 측정하기 위해 설계되었고, Fx힘센서와 Fz힘센서의 정격하중이 각각 400, 500 N이다. 4축 힘센서
9는 Fx힘센서, Fy힘센서, Fz힘센서의 정격하중을 각각 20 N, Mz센서의 정격하중을 4.5 Nmm이 되도록 사각단순보를 이용하여 설계되었고, 센서의 크기가 Ø 120 mm × 85 mm이었다. 2축 힘/토크센서
10는 재활로봇을 힘제어와 가해지는 힘과 토크를 측정하기 위해 Fz힘센서의 정격하중을 600 N, Tz토크센서의 정격하중을 30 Nm이 되도록 설계하였다. ATI
11는 다양한 종류 2축부터 6축 힘센서를 개발하여 판매하고 있다.
지금까지 개발한 다축 힘센서는 착용용 보행로봇에 부착하기에 크기가 맞지 않거나 각 축의 정격하중이 등이 적합하지 않아 정확한 측정이 어려웠다. 또한 다축 힘센서
8,10는 재활로봇의 링크에 직접 설계하여 제작한 것이므로 사용이 어렵다. 그러므로 뇌졸중한자 등 다리가 불편한 분이 착용용 보행로봇을 이용하여 불규칙한 지면, 계단 등을 보행할 때 다리의 무게를 감지하고, 발이 지면이나 장해물에 접촉되는 것을 감지하기 위한 적합한 힘센서의 개발이 필요하다. 이 센서는 크기, 무게 등을 고려하여 착용용 보행로봇의 링크에 직접 설계 및 제작하는 것이 필요하다.
따라서 본 논문에서는 평행평판보를 이용하여 착용용 보행로봇에서 허벅지부분의 X방향의 힘, Y방향의 힘과 Z방향의 힘을 측정할 수 있는 허벅지 3축 힘센서를 설계하였다. 센서 감지부의 크기를 설계하기 위해 유한요소법을 이용하였고, 스트레인게이지를 부착하여 3축 힘센서를 제작하였으며, 제작된 허벅지 3축 힘센서의 특성실험을 실시하였다.
2. 착용용 보행로봇의 허벅지 링크 3축 힘센서 설계
2.1 착용용 보행로봇의 허벅지 링크 구성 및 힘측정 원리
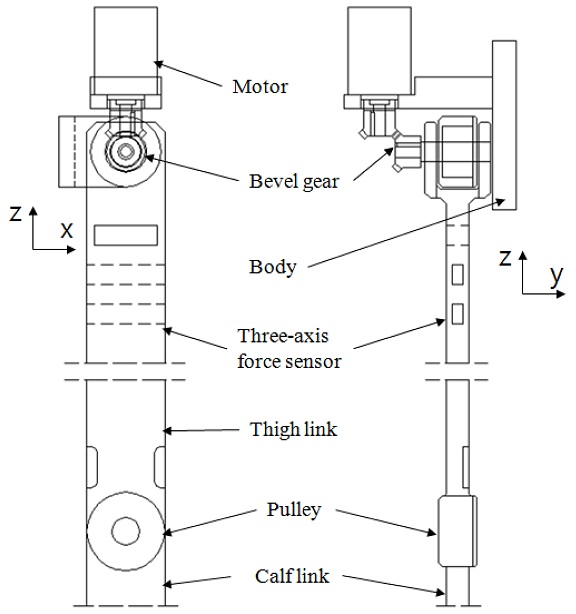
Fig. 1은 착용용 보행로봇의 허벅지 링크 구성과 힘측정원리를 나타내고 있다. 허벅지 링크(Thigh Link)는 3축 힘센서(Three-Axis Force Sensor), 회전기구(Rotational Instrument), 몸체(Body), 종아리 링크(Calf Link), 풀리와 줄(Pulley And Wire) 등으로 구성되었다. 3축 힘센서는 Fx힘센서, Fy힘센서, Fz힘센서로 구성되어 있다. Fx힘센서는 로봇이 허벅지를 회전시킬 때 허벅지, 종아리, 발 전체의 무게를 감지하여 다리환자의 보행을 안전하게 제어하고, Fy힘센서는 다리가 안쪽과 바깥쪽으로 힘이 가해졌을 때의 힘을 측정하고, Fz힘센서는 발바닥이 지면에 접촉되었는지를 감지한다. 그리고 Fx힘센서와 Fy힘센서는 발바닥과 발끝 등이 불규칙한 지면 및 장해물에 접촉되는 것을 감지하여 넘어지지 않도록 제어하는데 사용된다. 일반적으로 본 논문의 Fx힘센서 대신 토크센서를 부착해야 하나, 토크센서를 부착할 경우에는 센서의 무게, 부피 등이 로봇에 큰 단점이 되므로 부착하지 않았다.
Fig. 1Principle of thigh link configuration and force measurement of wearable walking robot
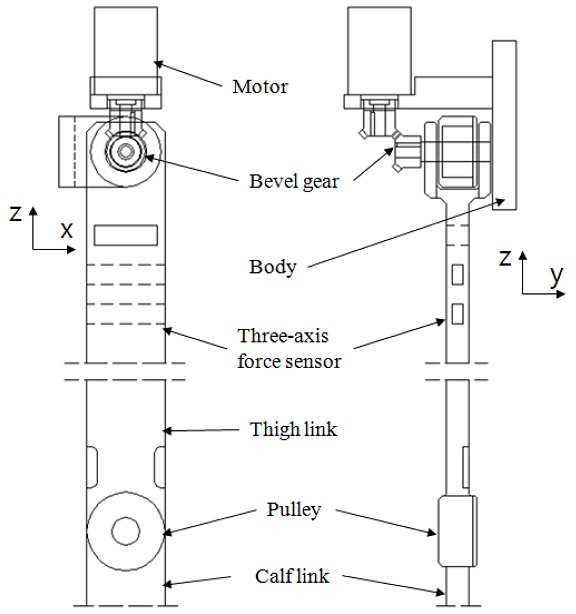
회전기구는 모터, 베벨기어 등으로 구성되었고, 모터의 회전을 베벨기어가 90도 방향을 바꾸어 허벅지 링크의 상부끝 부분을 보행의 회전각만큼 시계방향과 반시계방향으로 회전시킨다. 몸체는 다리환자의 허리와 강한 밴드를 이용하여 고정되고, 회전기구를 고정한다. 종아리 링크는 풀리와 줄을 이용하여 종아리 링크를 회전시킨다.
착용용 보행로봇은 다리환자가 보행시 회전기구의 회전에 따라 허벅지링크가 회전되고, 이때 허벅지 링크 3축 힘센서가 감지하는 허벅지 이하의 다리무게를 감지하여 안전하게 제어함과 동시에 불규칙한 지면 혹은 장해물과 접촉되었을 때 가해지는 힘을 측정하여 안전하게 제어한다.
2.2 허벅지 링크의 3축 힘센서 구조
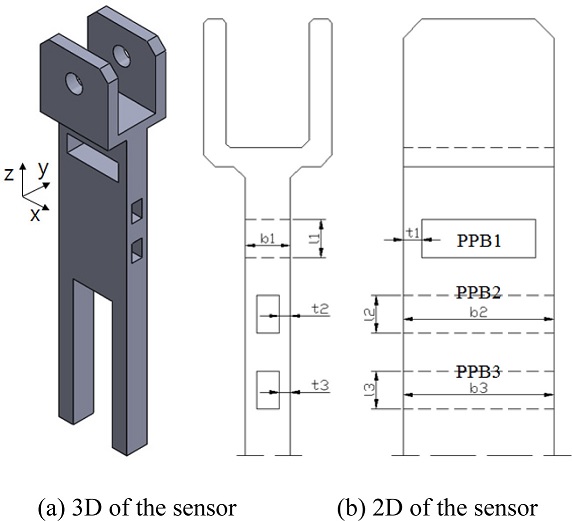
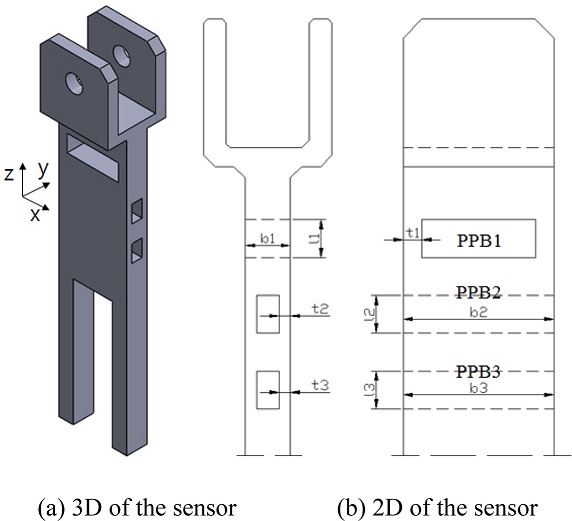
Fig. 2(a)는 허벅지 링크 3축 힘센서 구조의 3차원 그림을 나타내고 있고,
Fig. 2(b)는 3축 힘센서의 감지부의 크기를 2차원이로 나타낸 것이다. 3축 힘센서 중 Fx힘센서의 감지부는 평행평판보 1(PPB1: Parallel Plate Beam1), Fy힘센서의 감지부는 PPB2, Fz힘센서의 감지부는 PPB3로 구성되어 있고, Fy힘센서와 Fz힘센서의 감지부는 X방향으로 사각홀이 뚫어졌으며, Fx힘센서의 감지부는 Y방향으로 사각홀이 관통되었다. 3축 힘센서 중 Fx힘센서의 감지부 크기는 두께 T1, 길이 L1, 폭 B1이고, Fy힘센서 감지부의 크기는 두께 T2, 길이 L2, 폭 B2이며, Fz힘센서 감지부의 크기는 두께 T3, 길이 L3, 폭 B3이다. 각 센서의 감지부의 크기는 센서 설계시 설계변수로 사용된다.
Fig. 2Structure of three-axis force/torque sensor
2.3 허벅지 링크 3축 힘센서의 설계 및 제작
허벅지 링크 3축 힘센서의 감지부를 설계하기 위해서는 대부분의 설계변수를 착용용 보행로봇의 크기, 힘측정방법 등을 고려하여 미리 결정하고, 일부의 설계변수를 이론해석 혹은 소프트웨어 등을 이용하여 결정해야 한다. 허벅지 링크 3축 힘센서의 설계변수는 정격출력, 정격용량, Fx힘센서의 감지부의 크기인 두께 T1, 길이 L1, 폭 B1, Fy힘센서의 감지부의 크기인 두께 T2, 길이 L2, 폭 B2, Fz힘센서의 감지부의 크기인 두께 T3, 길이 L3, 폭 B3, 그리고 스트레인게이지 부착위치이다.
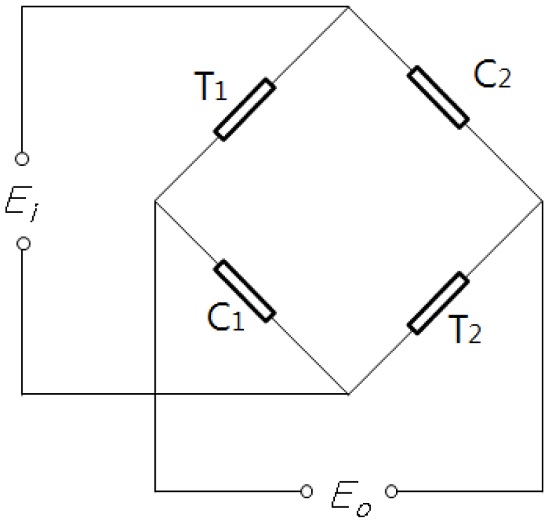
허벅지 링크 3축 힘센서의 정격변형률은 4개의 스트레인게이지가 부착되어
Fig. 3에 나타낸 휘스톤브리지를 구성하여 만들어진 각 센서에 정격하중을 가하여 출력된 값으로 계산되고, 그 식은 다음과 같이 표현할 수 있다.
8
Fig. 3Wheastone bridge for three-axis force sensor
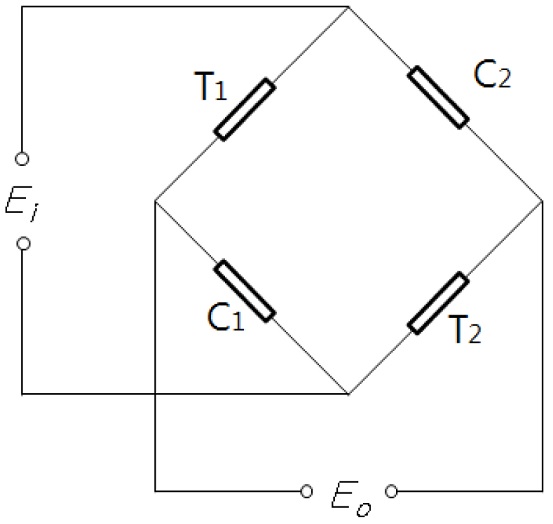
여기서 ε은 휘스톤브리지의 총 변형률, εT1은 인장 스트레인게이지 T1의 변형률, εC1은 압축 스트레인게이지 C1의 변형률, εT2은 인장 스트레인게이지 T2의 변형률, εC2은 압축 스트레인게이지 C2의 변형률이다.
각 센서의 정격출력은 각 센서의 정격하중을 가했을 때의 출력값을 말하고, 그 식은 입력전압과 출력전압의 비로 나타내며, 다음과 같이 쓸 수 있다.
8
여기서,
Ei는 휘스톤브리지의 입력전압,
Eo는 휘스톤브리지의 출력전압,
K는 스트레인게이지의 상수(약 2.03),
ε는
식(1)로부터 얻은 총 변형률이다.
허벅지 링크 3축 힘센서의 결정된 설계변수들은 Fx힘센서, Fy힘센서, Fz힘센서의 정격하중을 각각 400, 200, 1000 N, Fx힘센서와 Fy힘센서의 정격출력을 약 0.5 mV/V(정격변형률: 1000 um/m), Fz힘센서의 정격출력을 약 0.1 mV/V(정격변형률: 200 um/m), Fx힘센서 감지부의 폭 B1을 12 mm, 길이 L1를 10 mm, Fy힘센서와 Fz힘센서 감지부의 폭 B2을 30 mm, 길이 L2를 10 mm, Fx힘세서와 Fy힘센서의 스트레인게이지 부착위치는 보의 길이방향으로는 1.5 mm이고 폭방향으로는 중심선 라인, 즉 폭의 1/2인 중심선상이고, Fz힘센서의 세로방향으로 부착하는 스트레인게이지의 부착위치는 보의 길이방향으로는 1.5 mm이고 폭 방향으로는 1/2인 중심선상이고, 가로방향으로 부착하는 스트레인게이지의 부착위치는 보의 길이방향으로는 2.0 mm이고 폭방향으로는 1/2인 중심선상이다. Fx힘센서의 정격용량은 성인의 발의 무게와 로봇의 허벅지 이하의 무게 등을 고려하여 400 N으로 결정하였고, Fy힘센서의 정격용량은 성인의 발이 지면에 접촉할때 발의 안쪽과 바깥쪽으로 작용되는 힘 등을 고려하여 200 N으로 결정하였으며, Fz힘센서의 정격용량은 성인이 지면과 접촉하였을 때 체중을 고려하여 1000 N으로 결정하였다.
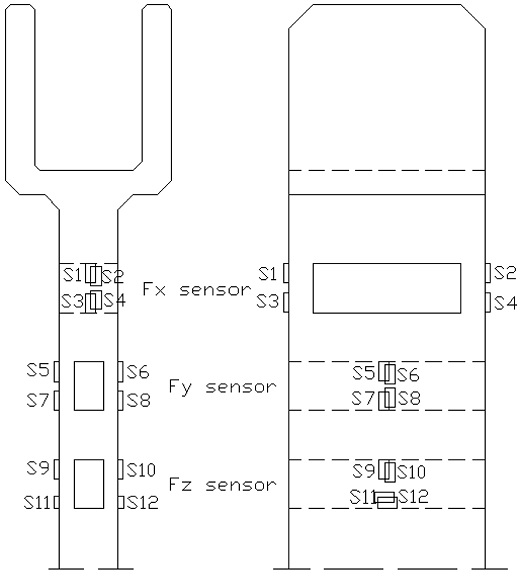
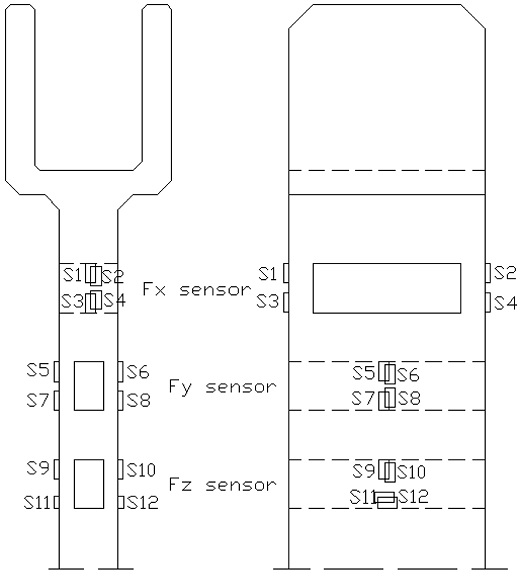
Fig. 4은 허벅지 링크 3축 힘센서의 스트레인게이지 부착위치를 각각 나타내고 있고, 이것들은 유한요소해석 결과를 토대로 결정되었다. 허벅지 링크 3축 힘센서의 Fx힘센서는 S1-S4이고, Fy힘센서는 S5-S8이며, Fz힘센서는 S9-S12이다. 이 위치는
식(1)을 이용하여 계산한 각 센서의 정격변형률이 발생되는 지점이다.
Fig. 4Attachment locations of strain gages on each sensing element of three-axis force sensor
유한요소해석(Finite Element Method, FEM)을 위해 소프트웨어에 입력한 재료상수 는 제작할 센서의 재질이 알루미늄이므로 종탄성 계수가 70 GPa, 프와송의비가 0.3이며, 8절점 6면체 블록을 선택하였다.
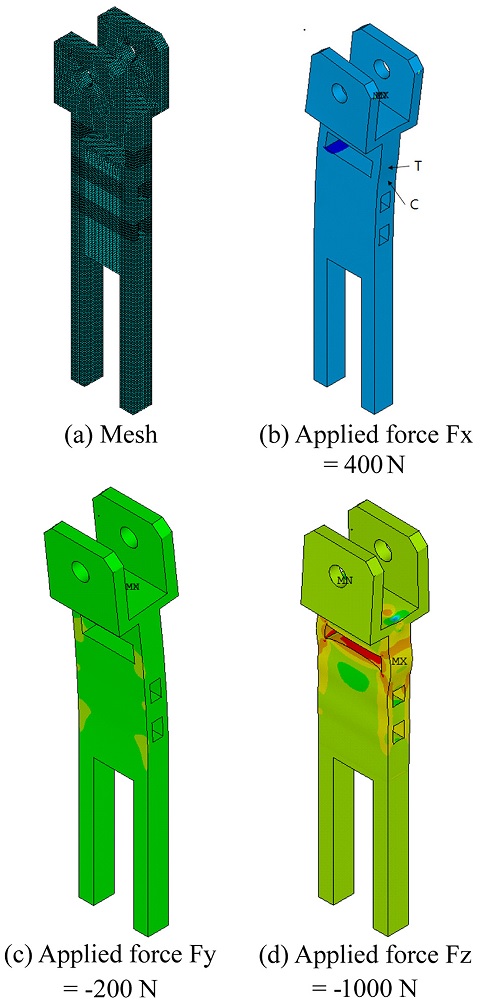
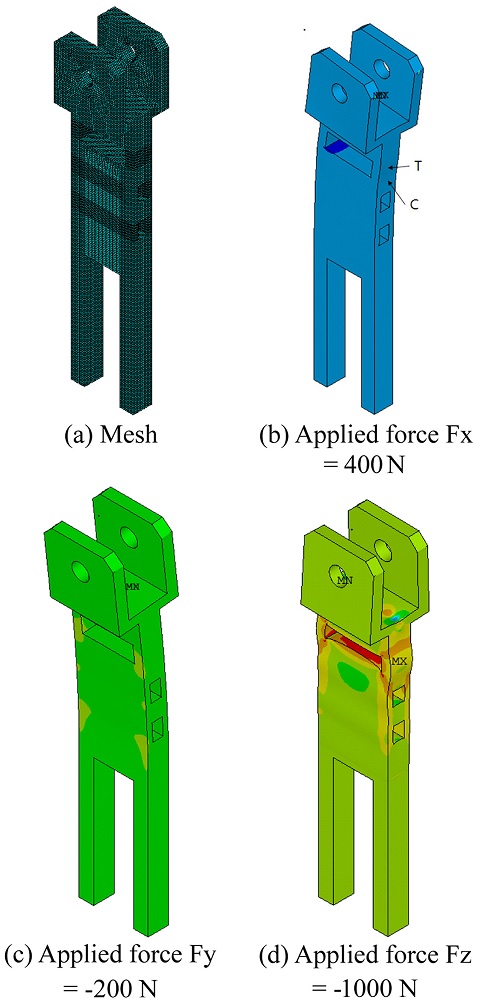
Fig. 5(a)는 허벅지 링크 3축 힘센서를 유한요소해석을 하기 위한 작게 나눈 모습을 나타내고 있고,
Fig. 5(b)는 허벅지 링크 3축 힘센서의 Fx힘센서에 X방향으로 정격하중 400 N을 가했을 때,
Fig. 5(c)는 Fy힘센서에 Y방향으로 정격하중 -200 N을 가했을 때,
Fig. 5(d)는 Fz힘센서에 Y방향으로 정격하중 -1000 N을 가했을 때 유한요소번을 적용하여 해석한 결과인 변형된 모습 각각 나타내고 있다. 이 변형된 모습은 허벅지 링크 3축 힘센서의 구조를 모델링 할 때 예상했던 모습과 유사하다.
Fig. 5Deformed shape of thigh link three-axis force sensor
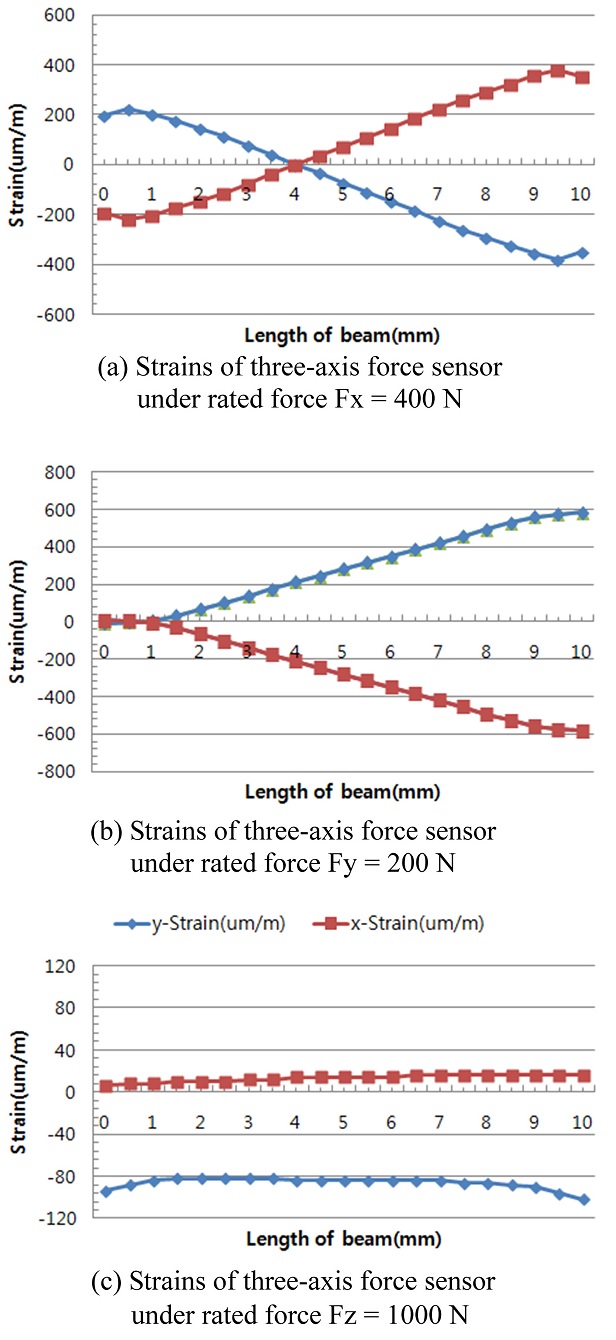
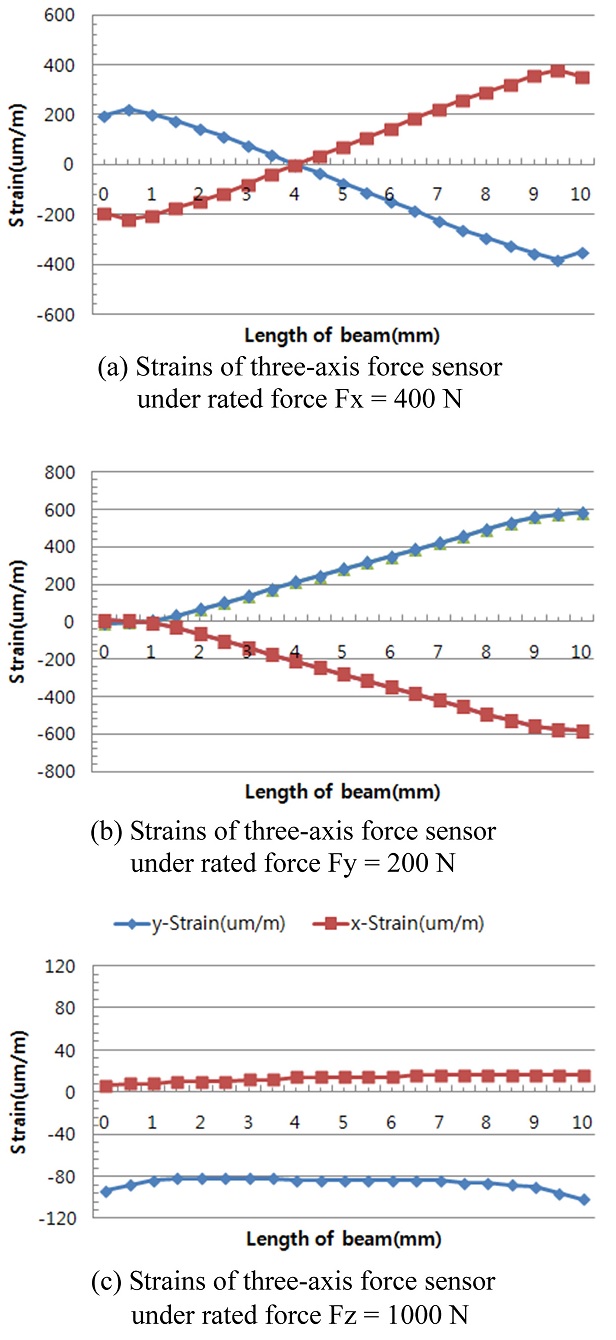
Figs. 6(a)-
6(c)는 허벅지 링크 3축 힘센서에 각각의 Fx힘센서, Fy힘센서, Fz힘센서의 정격하중 400, 200, 1000 N이 가해졌을 때, 각 센서 감지부의 변형률분포를 각각 나타내고 있다. Fx힘센서와 Fy힘센서 감지부의 2개의 그래프가 음(-)과 양(+)의 값으로 대칭으로 나타난 것은 평행평판보가 2개의 평판보로 구성되어 있으며, 이보들이 정격하중이 가해졌을 때
Fig. 5(b)와 같이 인장(Tension, T)과 압축(Compression, C)으로 변형되기 때문이다. 허벅지 링크 3축 힘센서의 Fx힘센서와 Fy힘센서 감지부의 변형률분포에서 변형률이 0 um/m인 지점은 각각 4.0와 0.7 mm지점이었다. Fz힘센서 감지부의 위에 나타낸 그래프는 가로방향으로 부착하는 스크레인게이지의 부착위치 변형률분포를 나타내므로 X방향 변형을을 나타낸 것이고, 아래에 나타낸 그래프는 세로방향으로 부착하는 스트레인게이지의 부착위치 변형률분포를 나타내므로 Z방향 변형을 을 나타낸 것이다. Fx힘센서와 Fy힘센서 제작을 위한 스트레인게이지는 평행평판보의 각 보의 길이방향으로 부착된다. 이것은 센서 감지부인 평행평판보의 각 보에 직각 방향으로 힘이 가해졌을 때, 두 보가 길이방향으로 같은 모양으로 변형되어 길이 방향 변형률이 크게 발생하기 때문이다. Fz힘센서는 제작을 위한 스트레인게이지는
Fig. 4 에서 나타낸 것(Fz Sensor의 스트레인 게이지 부착위치: S9와 S10은 압축변형, S11과 S12는 인장변형)과 같이 휘스톤브리지를 구성하는 스크레인게이지 중 2개는 평행평판보의 각 보의 길이방향 (세로방향)으로 부착하고, 2개는 각 보의 폭방향(가로방향)으로 부착해야 한다. 이것은 평행평판보의 각 2개의 보에 같은 힘이 보의 길이방향과 같은 방향으로 가해지므로 스트레인게이지 부착지점에서 가로방향(X방향)과 세로방향(Z방향)의 변형률은 인장(+)과 압축(-)가 발생되기 때문이다. Z방향으로 힘을 가할 때, 2개의 스트레인게이지는 인장변형률, 2개의 스트레인게이지는 압축변형률이 발생하도록 하는 것은 휘스톤브리지에서 최대의 출력이 발생하기 때문이다.
Fig. 6Strain distribution on each beam of thigh link three-axis force sensor
각 변형률분포에서 좌측과 우측의 끝의 변형률이 감소한 것은 유한요소 프로그램의 끝 효과 오차 때문이다.
Table 1은 허벅지 링크 3축 힘센서의 각 센서의 스트레인게이지 부착위치에서의 유한요소해석 결과를 나타내고 있다. 이 정격변형률은 스트레인게이지 부착위치에서의 변형률들을
식(1)에 대입하여 계산된 것이다. 허벅지 링크 3축 힘센서의 최대 정격변형률오차는 -2.0%이었다. 이와 같은 오차는 설계시 가공을 고려하여 감지부의 두께를 0.1 mm 단위로 조절하였기 때문이다. 유한요소해석 결과, 3축 힘센서의 Fx힘센서 감지부는 폭 B1은 12 mm, 길이 L1은 10 mm, 두께 T2는 4.9 mm이었고, Fy힘센서 감지부는 폭 B2은 40 mm, 길이 L2는 10 mm, 두께 T2는 2.9 mm이었으며, Fz힘센서 감지부는 폭 B3은 40 mm, 길이 L3는 10 mm, 두께 T3는 2.8 mm이었다.
Table 1Strains from FEM analysis at each attachment location of strain-gages of each sensor of thigh link three-axis force sensor
Table 1
Three-Axis force/
torque sensor |
Thickness
(mm) |
Length
(mm) |
Width
(mm) |
|
Fx sensor (300 N) |
T1 = 0.68 |
L1 = 5 |
B1 = 74 |
|
Tz sensor (15 N m) |
T1’ = 1.28 |
L1’ = 5 |
B1 = 74 |
|
Fz sensor (100 N) |
T2 = 1.38 |
L2 = 10 |
B2 = 14 |
3. 3축 힘센서의 제작 및 특성평가
허벅지 링크 3축 힘센서는
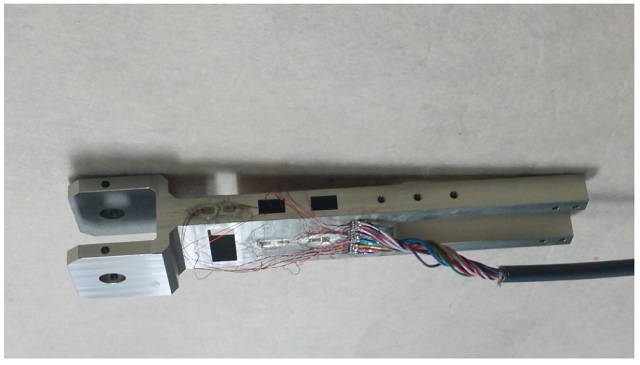
Fig. 4에 나타낸 각 센서의 스트레인게이지 부착위치에 스트레 인게이지 (미국 MM사, N2A-13-S1452-350, 게이지 상수 2.03, 크기 3 mm × 5.2 mm)를 부착하고 휘스톤브리지를 구성하여 제작하였으며,
Fig. 7은 제작된 3축 힘센서의 사진을 나타내고 있다.
Fig. 7 Photograph of the manufactured thigh link three-axis force sensors
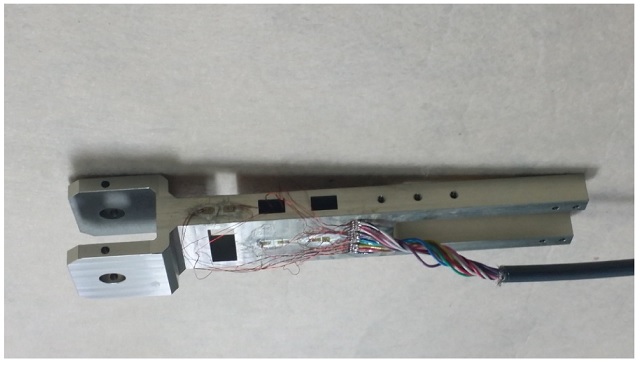
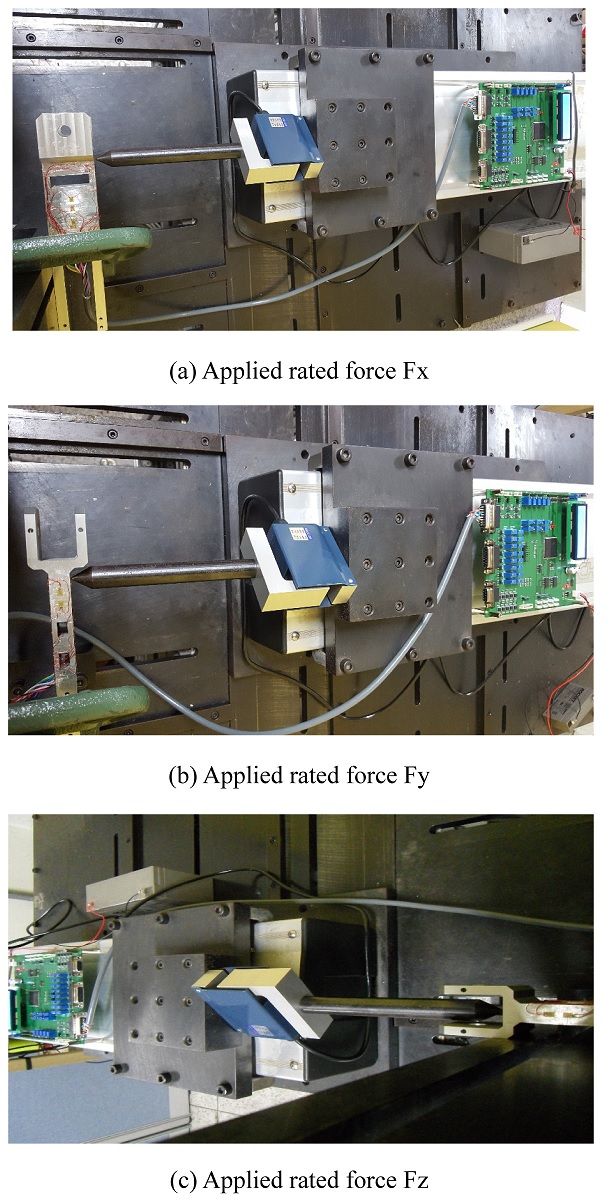
Fig. 8은 제작한 3축 힘센서를 정격출력 등 특성실험하기 위한 실험장치 및 실험장면을 나타내고 있다.
Fig. 8(a)는 다축 힘센서 교정기
12에 3축 힘센서를 고정한 실험장치를 나타내고 있고, 사용된 측정장치는 고정밀도 측정장치 (DMP40)을 사용하였다. 그리고
Fig. 8(b)는 특성실험시 허벅지 링크 3축 힘센서중 Fx힘센서의 정격하중 Fx를 가하는 모습,
Fig. 8(c)는 Fy힘센서의 정격하중 정격힘 Fy를 가하는 모습,
Fig. 8(c)는 Fz힘센서의 정격하중 정격힘 Fz를 가하는 모습을 각각 나타내고 있다. 정격출력은 허벅지 링크 3축 힘센서의 Fx힘센서의 정격하중 400 N, Fy힘센서의 정격하중 200 N, Fz힘센서의 정격하중 1000 N을 각각 3축 힘센서에 가한후 측정 하였고, 각 센서마다 세 번을 실시하여 평균한 값을 각 센서의 정격출력으로 결정하였다.
Fig. 8 Experimental setup for the characteristic test of thigh link three-axis force sensor
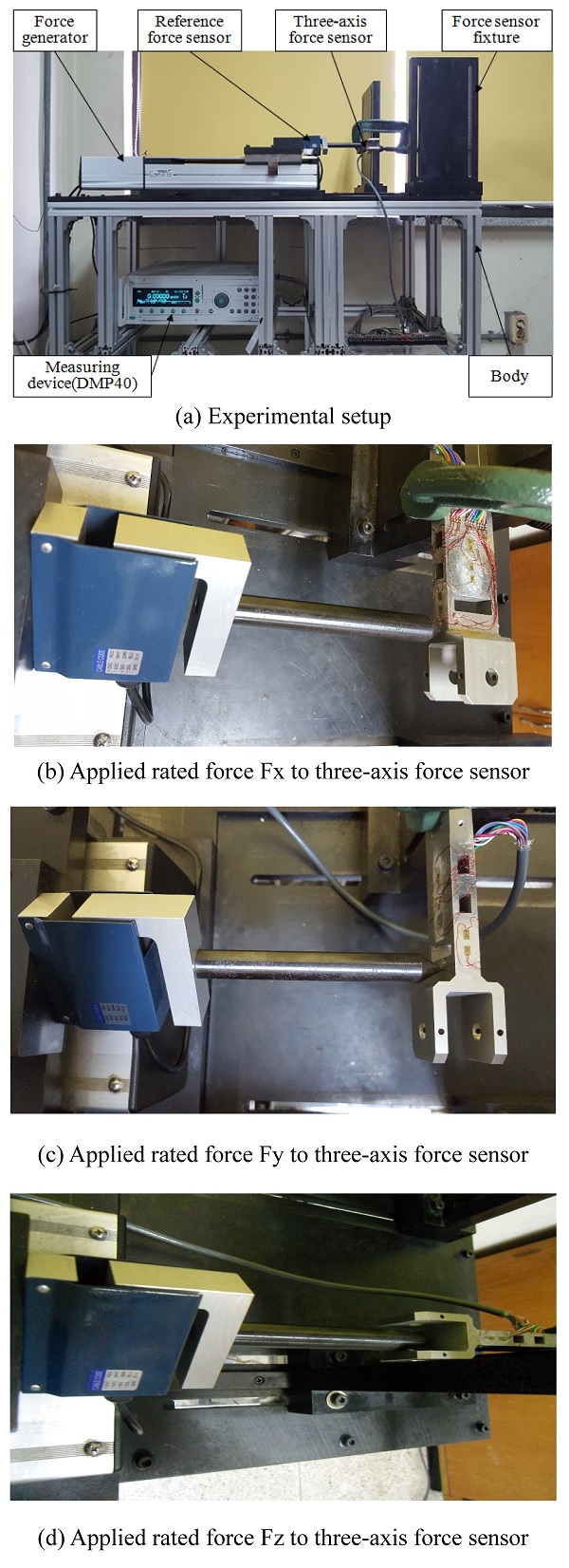
Table 2는 허벅지 링크 3축 힘센서의 유한요소해석과 실험결과의 정격출력 및 오차를 나타내고 있다. 유한요소해석 결과에 의한 정격출력은 사용된 스트레인게이지상수(2.03)와
표 1의 정격변형률값들을
식(2)에 대입하여 계산한 것이고, 실험에 의한 정격출력은 각 센서의 특성실험 결과로 얻은 값이다. 유한요소해석 결과를 기준으로 실험결과의 오차는 최대 -2.2%이었고, 발생된 오차의 원인은 스트레인게이지의 부착오차, 감지부의 가공오차, 유한 요소 소프트웨어의 고유오차 등으로 판단된다.
Table 3은 허벅지 링크 3축 힘센서의 재현도오차와 비직선성오차를 나타낸 것이고, 그것들의 최대오차는 각각 0.04% 이내이었다. 제작한 3축 힘센서의 특성실험 결과 재현도오차, 비직선성오차가 이미 판매하고 있는 다축 힘센서
11의 그것과 비슷한 수준이었다.
Table 2 Rated output from FEM analysis and characteristic test of each sensor of thigh link three-axis force sensor
Table 2
|
Sensor |
Rated output (mV/V) |
Error
(%) |
|
FEM |
Exp. |
|
Fx |
0.5055 |
0.4998 |
-1.2 |
|
Fy |
0.5024 |
0.4922 |
-2.1 |
|
Fz |
0.0995 |
0.0973 |
-2.2 |
Table 3 Non-Linearity error and repeatability error of thigh link three-axis force sensor
Table 3
|
Sensor |
Repeatability error (%) |
Non-Linearity error (%) |
|
Fx |
0.03 |
0.04 |
|
Fy |
0.04 |
0.04 |
|
Fz |
0.04 |
0.04 |
착용용 보행로봇의 허벅지 링크 3축 힘센서를 사용하기 위해서는 로봇을 제어하는 제어장치와 각 센서를 실제로 사용하는 것과 같이 연결하고 교정을 해야 한다.
Fig. 9(a)는 허벅지 링크 3축 힘센서 중 Fx힘센서 교정방법을 나타낸 것이고, 이것은 다축 힘센서 교정장치12 에 3축 힘센서를 고정하고 X방향으로 정격하중 400 N 가한 후 로봇제어장치에 400 N이 지시하도록 증폭기의 증폭률을 조정하였다.
Fig. 9(b)는 Fy힘센서 교정방법을 나타낸 것이고, 이것은 Y방향으로 정격하중 200 N 가한 후 로봇제어장치에 200 N이 지시하도록 증폭기의 증폭률을 조정하였다. 그리고
Fig. 9(c)는 Fz힘센서 교정방법을 나타낸 것이고, 이것은 Z방향으로 정격하중 1000 N 가한 후 로봇제어장치에 1000 N이 지시하도록 증폭기의 증폭률을 조정하였다. 각 센서의 비직선성오차와 재현도오차를 계산하기 위해서 Fx힘센서는 0부터 400까지 40 N 단계로 증가하면서 하중을 가하고 측정하였고, 감소하면서 측정하는 과정을 3회 실시하였다. 그리고 Fy힘센서는 0에서 200까지 20 N 단계로 Fx힘센서와 같이 3회 측정하였으며, Fz힘센서는 0에서 1000까지 100 N 단계로 Fx힘센서와 같이 3회 측정하였다.
Table 4는 교정으로부터 계산한 허벅지 링크 3축 힘센서의 각 센서의 비직선성오차와 재현도오차를 나타낸 것이다. 최대 비직성성오차와 최대재현도 오차는 각각 0.1% 이내이었다. 이와 같이 오차가 크게 나타난 것은 보행보조로봇의 제어장치에 사용된 아날로그/디지털컨버터(Analog to Digital Converter)가 12비트(Bit)를 사용하여 분해능이 크기 때문이다. 즉, Fx힘센서의 분해능은 0.2 N(Fx 힘센서의 정격출력 ±400 N(800 N)를 컨버터의 4000카운터로 나누면 약 0.2 N임), Fy힘센서와 Fz힘센서의 분해능은 각각 0.1 N가 0.5 N이다.
Fig. 9 Experimental setup for the calibration test of three-axis force sensor
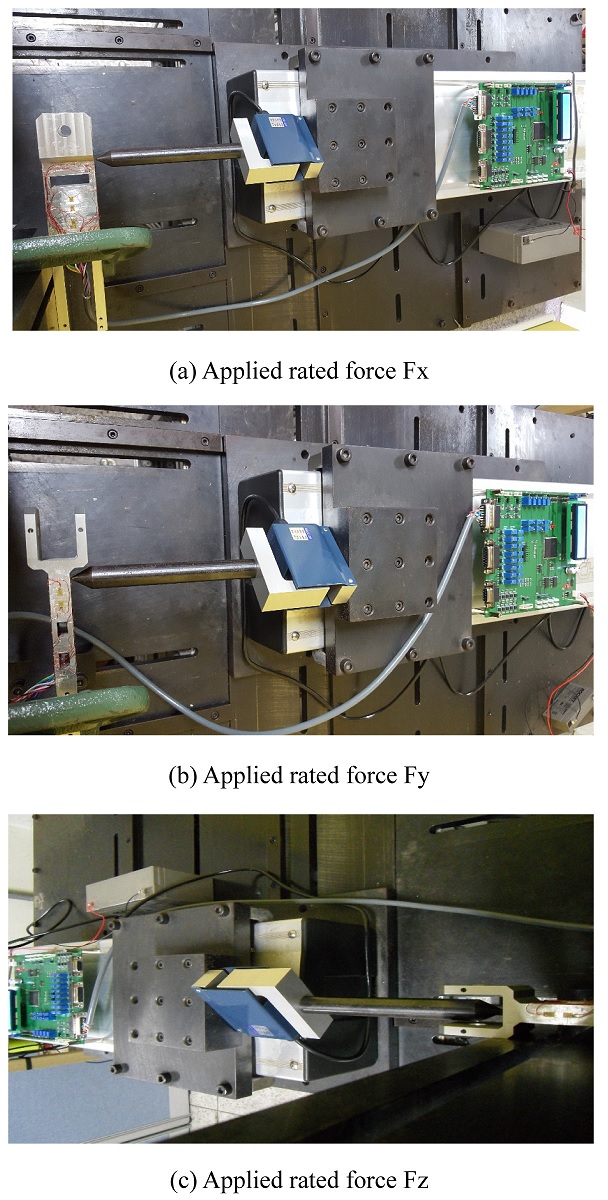
Table 4 Repeatability error and non-linearity error of thigh link three-axis force sensor in the calibration
Table 4
|
Sensor |
Repeatability error (%) |
Non-Linearity error (%) |
|
Fx |
0.1 |
0.1 |
|
Fy |
0.1 |
0.1 |
|
Fz |
0.1 |
0.1 |
4. 결론
본 논문에서는 착용용 보행로봇을 착용하고 계단, 불규칙한 지면 등을 보행할 때 장해물, 지면의 돌출부 등이 발 등과 접촉되는 것을 감지하고, 보행시 발의 무게를 감지기 위해 허벅지 링크 3축 힘센서를 설계 및 제작하였다. 이 3축 힘센서는 X방향의 힘, Y방향의 힘, Z방향의 힘을 측정할 수 있도록 평행평판보 구조로 설계하였다. 제작한 허벅지 링크 3축 힘센서의 최대재현도오차와 최대 비직선성오차는 각각 0.04% 이내이었다. 그리고 허벅지 링크 3축 힘센서와 로봇 제어장치를 연결한 후 교정한 결과, 최대 비직선성오차와 최대재현도오차가 0.1%이내 이었다. 이 결과는 착용용 보행로봇에 부착하여 보행시 발에 접촉되어 가해지는 힘과 다리의 무게를 측정하는데 사용될 수 있을 것으로 생각된다.
ACKNOWLEDGMENTS
이 논문은 2015년도 정부(미래창조과학부) 의 재원으로 한국연구재단의 기초연구사업 지원을 받아 수행된 연구임(No. 2015R1A2A2A01002952).
REFERENCES
- 1.
Rajasekaran, V., Aranda, J., Casals, A., and Pons, J. L., “An Adaptive Control Strategy for Postural Stability Using a Wearable Robot,” Robotics and Autonomous Systems, Vol. 73, pp. 16-23, 2015.
10.1016/j.robot.2014.11.014
- 2.
Karavas, N., Ajoudani, A., Tsagarakis, N., Saglia, J., Bicchi, A., et al., “Tele-Impedance Based Assistive Control for a Compliant Knee Exoskeleton,” Robotics and Autonomous Systems, Vol. 73, pp. 78-90, 2015.
10.1016/j.robot.2014.09.027
- 3.
Zhang, J.-F., Dong, Y.-M., Yang, C.-J., Geng, Y., Chen, Y., et al., “5-Link Model Based Gait Trajectory Adaption Control Strategies of the Gait Rehabilitation Exoskeleton for Post-Stroke Patients,” Mechatronics, Vol. 20, No. 3, pp. 368-376, 2010.
10.1016/j.mechatronics.2010.02.003
- 4.
Pennycott, A., Hunt, K., Jack, L., Perret, C., and Kakebeeke, T., “Estimation and Volitional Feedback Control of Active Work Rate during Robot-Assisted Gait,” Control Engineering Practice, Vol. 17, No. 2, pp. 322-328, 2009.
10.1016/j.conengprac.2008.09.011
- 5.
Wu, M., Hornby, T. G., Landry, J. M., Roth, H., and Schmit, B. D., “A Cable-Driven Locomotor Training System for Restoration of Gait in Human SCI,” Gait & Posture, Vol. 33, No. 2, pp. 256-260, 2011.
10.1016/j.gaitpost.2010.11.016
- 6.
Malcolm, P., Fiers, P., Segers, V., Van Caekenberghe, I., Lenoir, M., et al., “Experimental Study on the Role of the Ankle Push Off in the Walk-to-Run Transition by Means of a Powered Ankle-Foot-Exoskeleton,” Gait & Posture, Vol. 30, No. 3, pp. 322-327, 2009.
10.1016/j.gaitpost.2009.06.002
- 7.
Liu, S. A. and Tzo, H. L., “A Novel Six-Component Force Sensor of Good Measurement Isotropy and Sensitivities,” Sensors and Actuators A: Physical, Vol. 100, No. 2, pp. 223-230, 2002.
10.1016/S0924-4247(02)00135-8
- 8.
Jung, J. H. and Kim, G. S., “Design of Force Sensors of Rehabilitation Robot for Knee Rehabilitation,” Journal of Institute of Control, Robotics and Systems, Vol. 23, No. 1, pp. 46-52, 2017.
10.5302/J.ICROS.2017.16.0176
- 9.
Song, A., Wu, J., Qin, G., and Huang, W., “A Novel Self-Decoupled Four Degree-of-Freedom Wrist Force/Torque Sensor,” Measurement, Vol. 40, No. 9, pp. 883-891, 2007.
10.1016/j.measurement.2006.11.018
- 10.
Kim, H. S. and Kim, G. S., “Design of Two-Axis Force/Torque Sensor for Hip Joint Rehabilitation Robot,” Journal of Institute of Control, Robotics and Systems, Vol. 22, No. 7, pp. 524-529, 2016.
10.5302/J.ICROS.2016.16.0067
- 11.
ATI Industrial Automation, “Multi-Axis Forcre/Torque Sensor,” pp. 4-45, 2014.
- 12.
Kim, G.-S. and Yoon, J.-W., “Development of Calibration System for Multi-Axis Force/Moment Sensor and Its Uncertainty Evaluation,” J. Korean Soc. Precis. Eng., Vol. 24, No. 10, pp. 91-98, 2007.