1. 서론
인간 추종 로봇 기술은 무거운 장비나 짐을 운반하면서 인간을 추종하는 작업보조 로봇, 비료나 거름 및 작업장비 등을 운반하거나 수확물을 탑재하여 이동하면서 인간의 작업을 보조하는 농업용 로봇, 독거노인이나 장애인, 또는 야외 운동이나 조깅을 할 때 주인을 따라다니면서 물건운반과 동시에 즐거움이나 심리적 안정감을 주는 로봇, 그리고 골프장에서 골퍼를 추종하는 캐디로봇 등으로 그 응용분야가 다양하다.
로봇의 인간 추종을 위해서 필요한 기술은 인간 및 로봇의 위치평가 기술, 평가된 위치정보를 바탕으로 인간의 이동궤적을 추적하기 위한 경로계획 기술, 계획된 경로를 추적하는 경로추적 기술, 추종도중 출현하는 장애물을 감지하여 회피하는 장애물 회피 기술 등이 필요하다.
1-4 위치평가 성능은 위치 기반 서비스의 질적인 문제와 직결되며, 이에 따라 위치평가의 정확도를 향상시키기 위한 연구가 지속적으로 이루어지고 있다.
5
로봇이 인간을 추종하기 위한 기존방법은 주로 초음파, 레이저, 카메라, LED 등을 이용한다.
6 초음파 방식은 주로 두 개의 초음파 신호로부터 거리를 계산하고 이 거리차이로부터 방향을 추측하고 인간을 추종한다.
7 레이저 방식은 레이저 스캐너로 연속적으로 인간의 신체 일부를 추적하여 거리 및 방향을 계산하여 인간을 추종한다.
8,9 카메라 방식은 로봇이 추종할 인간의 얼굴이나 신체 특정부위를 목표로 연속적으로 인식하여 추적하는 방법이다.
10,11 그러나 카메라는 주변 빛 강도에 대단히 민감하여 조도가 일정하지 아니한 외부환경에서는 적용이 거의 불가하다. LED 방식은 카메라 방식의 단점인 주변환경 조도민감도에 대한 신뢰도를 높이기 위한 것으로서 LED를 인간의 몸에 부착하여 이 빛을 추적하는 방법이다.
이와 같은 기존방법은 인간의 신체 일부를 직접 감지하여 추적하는 방식으로써 인간과 로봇 사이에 장애물이 존재하거나 경사지나 언덕과 같은 환경에서 인간이 로봇 시야에서 벗어나는 경우 인간을 감지할 수 없으므로 추종이 불가능하다. 또한 다수의 인간과 로봇이 복수공동작업을 하는 경우 자신이 추종해야 할 인간을 구별하지 못할 뿐만 아니라 다른 인간과 로봇이 장애물 역할을 하여 추종성능이 극히 떨어진다. 따라서 인간 추종 로봇이 실용화되기 위해서는 경사지나 장애물 환경에서 복수공동작업이 가능할 뿐만 아니라 장애물 회피가 가능한 추종 방법의 개발이 필연적이다.
본 논문에서는 복잡한 옥외환경에서 효과적인 GPS 기반 인간추종 방법을 제안한다. 이 방법은 인간의 위치를 GPS로 인식하여 인간의 이동궤적을 형성하고 그 궤적을 로봇이 실시간으로 추종하는 방법이다. 따라서 로봇은 장애물이나 경사지 등에서도 추종해야 할 인간의 위치를 항상 인식할 수 있을 뿐만 아니라 인간이 장애물을 피해 이동한 궤적을 추종하게 되므로 장애물을 효과적으로 회피하여 인간을 추종할 수 있다. 또한 이 방법은 인간의 각 GPS 모듈에 ID를 부여함으로써 복수 동시 작업 시에도 자신이 추종해야 할 인간을 구별할 수 있다.
그러나 GPS는 다양한 요인에 의해 위치오차가 발생하기 때문에 생성된 인간의 궤적이 오차에 의해 평탄하지 못하고 변화가 심하여 로봇의 추종성능을 크게 저하시킬 수 있다. 따라서 본 연구에서는 로봇이 이동 중에 실시간으로 생성된 인간의 궤적을 평활화하는 방법을 제시한다. 또한 로봇이 생성된 궤적을 추종하는 궤적추종 방법을 제안하며, 직선 및 곡선 트랙에서의 실험을 통하여 추종성능을 분석하고 복잡한 실제 옥외환경에서의 인간 추종과 장애물 회피 실험 결과를 제시한다.
2. 로봇 시스템 구성 및 위치평가
2.1 인간 추종 로봇 시스템 구성
GPS 기반 인간 추종 로봇 시스템은
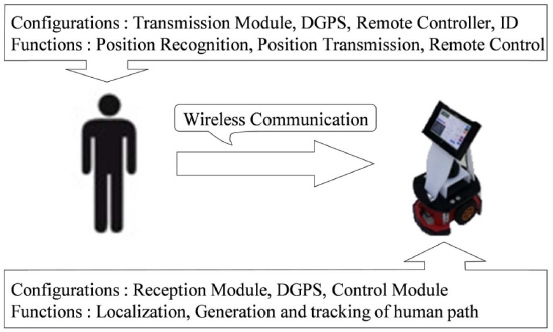
Fig. 1과 같다. 로봇은 인간이 휴대한 GPS로부터 측정된 인간의 위치정보를 무선통신으로 수신 받아 인간의 위치를 인식한다. 따라서 로봇은 장애물이나 경사지 및 로봇 시야 범위와 상관없이 항상 인간의 위치를 인식할 수 있으며, 인간이 휴대하는 송신모듈에는 고유한 ID를 부여함으로써 복수공동작업 시에 로봇은 자신이 추종해야 할 인간을 구별할 수 있다.
Fig. 1Concept of human following robot system
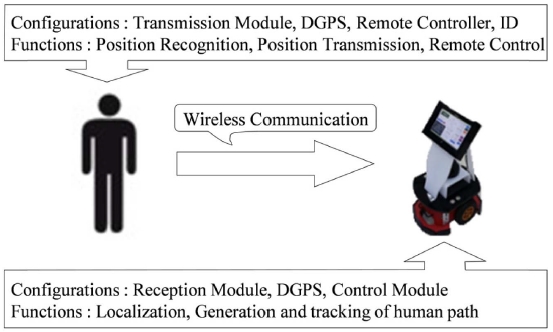
로봇은 GPS 모듈, 디지털 컴퍼스를 장착하고 인간을 추종한다. 로봇의 기능은 위치평가를 수행하여 자신의 정밀위치를 평가하고 인간을 추종하기 위한 추종궤적형성 및 평활화, 그리고 자율추종항법을 수행한다.
2.2 로봇의 위치평가
로봇의 위치평가는 로봇바퀴에 부착된 엔코더 정보와 DGPS의 위치정보, 그리고 디지털 컴퍼스의 방향정보를 확장 칼만 필터로 융합하여 최적의 위치를 평가한다.
12
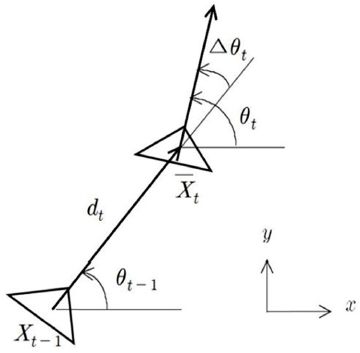
시간 t에서 로봇 위치 Xt는 주어진 제어입력 ut와 이전 위치 Xt-1에 의해 일반적으로 다음과 같이 비선형식으로 표현된다.
여기서, g(ut, Xt-1)은 비선형 상태천이함수이고 εt는 평균이 0이고 공분산이 Rt인 가우시안 잡음으로 가정한다.
시간
t에서 로봇의 예측된 위치
X¯t와 연관된 공분산
P¯t는
Fig. 2와 같은 관계에 의해 다음과 같이 표현된다.
Fig. 2System modeling
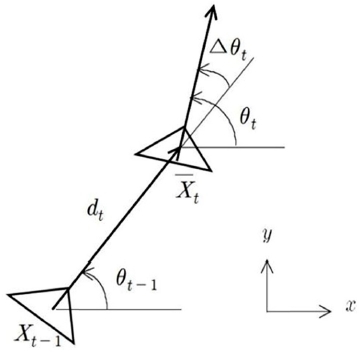
여기서, Gt는 g(ut, Xt-1)의 자코비안이다.
다음으로 측정모델
Zt는 다음
식(4)와 같이 표현된다.
여기서,
δt는 평균이 0이고 공분산이
Qt인 가우시안 잡음으로 가정한다.
식(4)에서
h(
Xt) = [
x,
y,
θ]
T로서 센서의 측정값과 로봇의 위치를 관계짓는 함수인데 로봇의 위치와 DGPS 및 디지털 컴퍼스의 측정값 사이에는 별다른 기하학적 관계가 없으므로 단지 로봇의 위치와 방향으로 구성된다.
X 각 센서에 대응되는 예측값과 실측값의 차로 구성되는 Innovation 행렬 vt를 다음과 같이 구한다.
위
식(5)에서
Zm,t는 DGPS 및 디지털 컴퍼스의 정보로서 [
xDGPS,
yDGPS,
θCOMPASS]
T를 나타낸다.
vt의 공분산은 다음
식(6)과 같이 표현된다.
여기서,
Ht는
h의 자코비안으로,
h가
식(4)와 같이 선형으로 표현되므로
Ht는 단위행렬이 된다.
vt와
St를 이용하여 다음과
식(7)과
식(8)과 같이 위치 및 공분산을 갱신한다.
여기서 kt는 칼만 이득으로서 다음과 같이 주어진다.
3. 인간 추종
3.1 궤적 생성 및 추종 방식
로봇은 인간 DGPS 정보를 기반으로 인간을 추종하기 위한 추종 궤적을 생성한다. 궤적이 생성되면 로봇은 직접추종 방식 또는 궤적추종 방식 중 설정된 방식을 이용하여 인간을 추종한다.
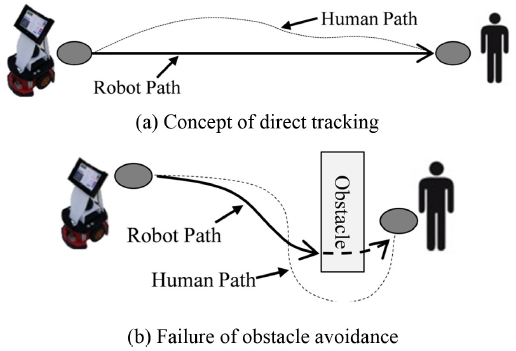
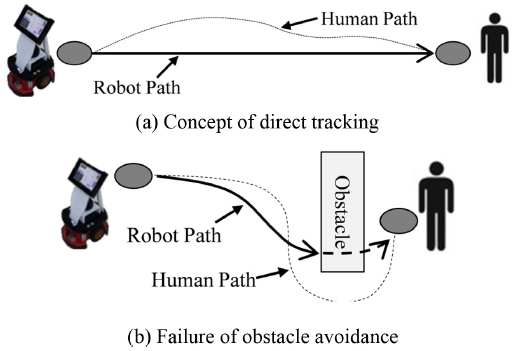
직접추종 방식은
Fig. 3(a)와 같이 로봇의 현재위치에서 인간의 현재위치까지 직선으로 연결하는 경로를 생성하여 추종하는 방법이다. 이 방식은 직선이나 완만한 곡선경로에서 최단 추종경로를 생성할 수 있으므로 가장 빠르게 인간을 추종할 수 있다. 그러나 이 방법은 장애물이 존재하는 경우에는
Fig. 3(b)와 같이 로봇이 장애물에 가려진 인간의 현재위치를 추종하므로 장애물과 충돌하는 경우가 발생하여 장애물회피가 불가능하다.
Fig. 3Direct tracking method
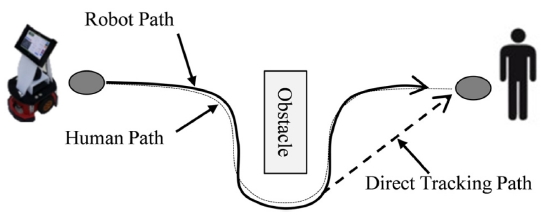
궤적추종 방식은 인간의 현재 위치가 아닌 인간의 이동궤적을 추종하는 방식으로써
Fig. 4와 같다. 그림에서 점선은 인간의 이동궤적, 실선은 로봇의 이동궤적을 나타낸다. 따라서 로봇은 형성된 인간궤적의 각 위치를 차례대로 추종함으로써 장애물 회피가 가능하다.
Fig. 4Trajectory tracking method
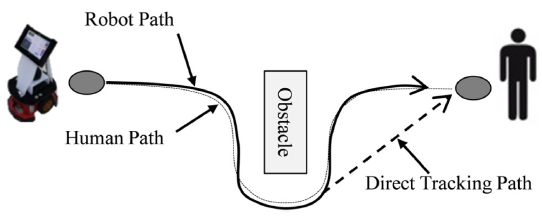
만약 로봇에 장애물 감지 기능이 있는 경우는 직접추종과 궤적추종을 적절히 선택함으로써 좀 더 효율적으로 장애물 회피가 가능하다. 즉, 로봇은 직접추종을 수행하다가 장애물이 감지되면 궤적추종으로 전환한다. 궤적추종을 통해 장애물을 회피하다가 더 이상 장애물이 감지되지 않으면
Fig. 4에 나타낸 바와 같이 직접 추종 경로(Direct Tracking Path)를 형성하여 인간을 추종함으로써 효과적으로 장애물 회피가 가능하다.
고정형 장애물은 이상과 같은 궤적추종을 이용하여 회피가 가능하며, 이동형 장애물은 장애물이 궤적상에서 사라질 때까지 기다리는 지연 방식을 이용함으로써 회피가 가능하다. 또한 복수 공동작업 시 각 로봇 및 인간은 고유한 ID를 가지고 있으므로, 로봇은 자신이 추종하는 인간이 아닌 다른 인간 및 로봇은 이동형 장애물로 인식하여 회피가 가능할 것으로 사료된다.
3.2 경로 평활화
로봇은 GPS로부터 측정된 인간의 각 위치를 그대로 연결하여 궤적을 생성한다. 그러나 GPS는 전리층, 대류층, 위성궤도 및 시계오차 등 다양한 형태의 무작위 오차가 개입될 뿐만 아니라 주변 장애물에 의한 위성정보수신장애 또는 다중경로현상에 의한 오차 등으로 인해 인간 궤적의 위치 변화가 심하게 발생할 수 있다. 인간 궤적의 위치 변화가 심하면 로봇이 그 궤적을 추종하는 성능이 크게 떨어지므로 효율적인 추종을 위해서는 경로 평활화가 필수적이다. 즉, 경로 평활화의 또 다른 효과는 무작위하게 변하는 인간의 위치오차를 어느 정도 상쇄시켜 위치정밀도를 향상시킬 수 있다.
인간 추종 로봇의 이동경로는 비교적 장거리이므로 구간이 넓은 전체 데이터로부터 하나의 곡선으로 최적화하는 방법은 적합하지 않다. 따라서 곡선 최적화 방법 중 전체 데이터를 모두 고려하지 않고 부분적인 데이터에 의한 평활화 방법인 이동평균법(Moving Average)을 이용하여 경로를 평활화한다.
13
시간 0부터 시간
n까지 인간 위치데이터가 시간 순에 따라 [
d0-
dn]으로 주어진 경우,
m을 평균할 데이터를 기준으로 좌 또는 우측 데이터 개수라 정의할 때
i번째 인간의 위치
d¯i는 다음
식(10)으로 평활화한다.
그러나 이동 중 실시간으로 인간궤적을 평활화하는 경우에는 현재 로봇위치를 중심으로 이전 또는 이후 인간의 위치 데이터 개수가 m보다 작을 경우가 자주 발생한다. 즉, 추종 초기에는 인간 위치 데이터 자체가 부족할 것이며 추종 중에도 경우에 따라 로봇의 현재 위치에서 인간의 현재 위치 사이의 데이터 수가 m보다 작아질 수 있다. 이러한 경우에는 다음 식을 이용하여 경로를 평활화한다.
여기서 di는 현재위치에서 로봇의 추종목표지점으로 설정된 인간 궤적상의 위치 데이터이며 k는 i를 중심으로 이전 또는 이후 데이터 개수 중 작은 수이다.
이와 같은 경로 평활화 방법은 m이 클수록 평활화 효과가 크지만, 실시간으로 인간을 추종하는 경우에는 일정한 거리를 두고 로봇이 인간을 추종해야 하기 때문에 m의 크기에는 한계가 있다. 따라서 실시간 추종의 경우 평활화할 수 있는 데이터의 최대 수 mmax는 다음과 같이 주어진다.
여기서 υr은 로봇의 이동속도, Dt는 인간과 로봇 사이의 추종여유거리, Ns는 초당 획득하는 인간의 위치 데이터 수, 즉 샘플링 비율이다. 본 연구에서는 Ns= 1Hz이고 로봇이 0.6 m/s의 속력으로 2 m정도의 간격을 두고 인간을 추종하므로 mmax= 3.3이 되지만 m은 정수이므로 m = 3이 된다.
3.3 인간 추종 방법
로봇은 칼만 필터를 이용하여 평가된 자신의 위치(xr, yr)와 인간궤적상의 목표지점 (xt, yt)로부터 로봇이 향해야 하는 방향 θv을 다음과 같이 계산한다.
직접추종은 인간의 위치정보가 수신될 때마다 목표지점을 향하는 방향 θv를 새롭게 갱신하여 추종하는 방법이다.
궤적추종은 형성된 인간궤적 상의 각 위치를 차례대로 목표지점으로 설정하여 추종하는 방식이다.
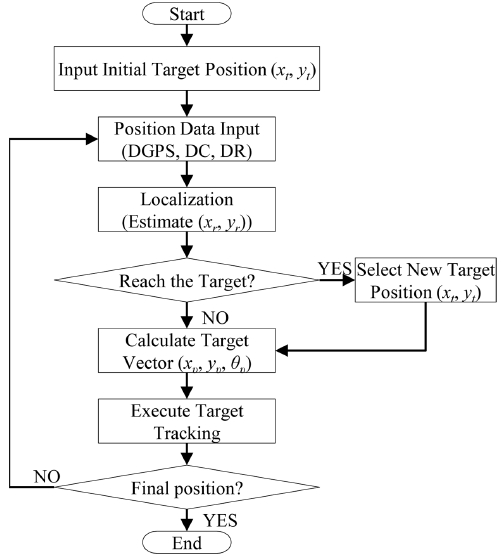
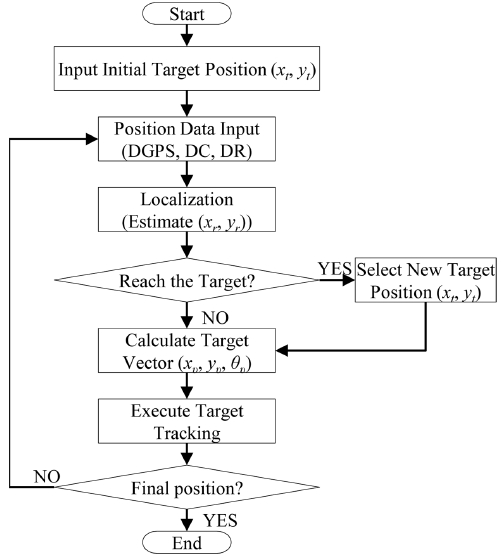
Fig. 5는 궤적추종 방법의 흐름도를 나타낸다. 주행이 시작되면 로봇은 DGPS 및 디지털 컴퍼스와 DR 정보를 받아들여 칼만 필터로 융합하여 최적의 위치(
xr,
yr)를 평가하고 목표지점 도달여부를 판단한다. 목표지점에 도달한 것으로 판단되면 로봇은 인간궤적의 다음 지점을 탐색하여 새로운 목표지점 (
xt,
yt)를 설정한다. 만약 현재 목표지점에 도달하지 못한 경우이면 현재 목표지점을 유지한다.
Fig. 5Flow chart of autonomous path tracking
다음 단계로 로봇 현재위치 (
xr,
yr)와 이동해야 할 목표지점(
xt,
tt)으로부터 로봇이 이동해야 할 방향벡터 (
xv,
yv,
θv)를
식(13)을 이용 하여 계산한다. 방향벡터가 계산되면 로봇은 회전해야 할 방향
θv만큼 로봇의 방향전환을 수행하여 이동한다. 이와 같은 과정을 반복 수행하면서 최종 목표지점에 도달하면 추종을 종료한다.
목표지점 도달여부는 로봇 및 인간의 위치오차를 고려하여 다음과 같이 판단한다. 즉, 로봇의 현재 위치와 목표지점 사이의 거리를 dt라 할 때 다음 조건을 만족하면 목표지점에 도달한 것으로 판단한다.
여기서,
Pii는
식(8)로 계산된 로봇의 현재 위치오차 공분산의 제곱근 행렬의 각 대각성분을 의미하고,
σGPS는 인간 GPS의 오차 표준편차를 나타낸다. 공분산은 각 위치평균값에 대한 편차의 제곱이므로 그 제곱근행렬의 대각성분은 각 방향에 대한 표준편차를 나타낸다고 볼 수 있다. 따라서
식(14)의 의미는 로봇의 현재 위치가 로봇 및 목표지점의 위치 불확실성을 합친 범위 내에 들어오는지를 판단하는 것이 된다. 공분산 행렬
P의 제곱근 행렬은 Cholesky 분해법을 이용하여 구한다.
14
4. 실험 및 고찰
4.1 인간추종 성능 평가
개발된 인간 추종 방법의 성능을 분석하기 위해 직선경로와 곡선경로에 대한 기초실험을 수행하였다. 실험은 인간이 기준경로를 따라 이동하여 생성된 이동궤적을 로봇이 2 m정도의 간격으로 추종한 뒤, 기준경로에 대한 오차를 평가하는 방법으로 수행되었다.
Fig. 6은 실험에 이용된 로봇 사진이며 디지털 컴퍼스와 DGPS의 사양은
Table 1과 같다.
Fig. 6Photo of the Pioneer robot

Table 1Specifications of digital compass and GPS
Table 1
|
Digital compass |
GPS(Robot, Human) |
|
Accuracy |
± 3o
|
2.5 m |
|
Sampling rate |
100 Hz |
1 Hz |
4.1.1 직선경로 실험
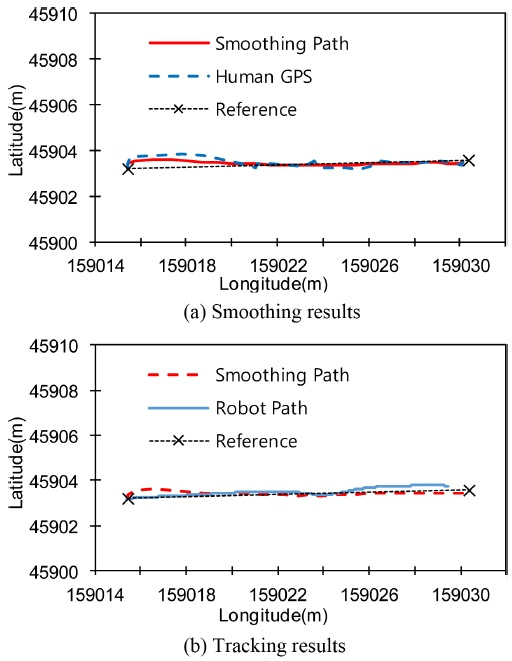
Fig. 7은 직선경로 추종실험 결과이다.
Fig. 7(a)는 경로 평활화 결과에 대한 그림으로서 검은색 점선은 기준경로, 파란색 점선은 인간의 GPS 궤적, 빨간색 실선은 평활화 된 인간의 경로를 나타낸다.
Fig. 7(b)는 로봇이 인간을 추종한 결과로서 검은색 점선은 기준경로, 빨간색 점선은 평활화된 인간의 이동궤적, 파란색 실선은 로봇의 이동궤적을 나타낸다. 실험 결과 기준경로에 대한 인간의 최대 위치오차는 0.59 m, 평균오차는 0.17 m인데 반해 평활화된 경로의 최대오차는 0.37 m, 평균오차는 0.09 m로 나타났다. 이것은 평활화가 궤적의 급격한 변화를 감쇠시킬 뿐만 아니라 GPS의 무작위오차도 어느 정도 개선할 수 있음을 의미한다. 기준경로에 대한 로봇의 최대 위치오차는 0.26 m, 평균오차는 0.11 m로 측정되었다. 로봇의 위치오차는 인간의 위치오차와 로봇 자체의 위치오차 및 경로추종 위치오차 등이 중첩되어 나타나는데 사용된 DGPS의 정밀도(2.5 m)를 고려할 때 양호한 결과라 할 수 있다.
Fig. 7Results of line tracking
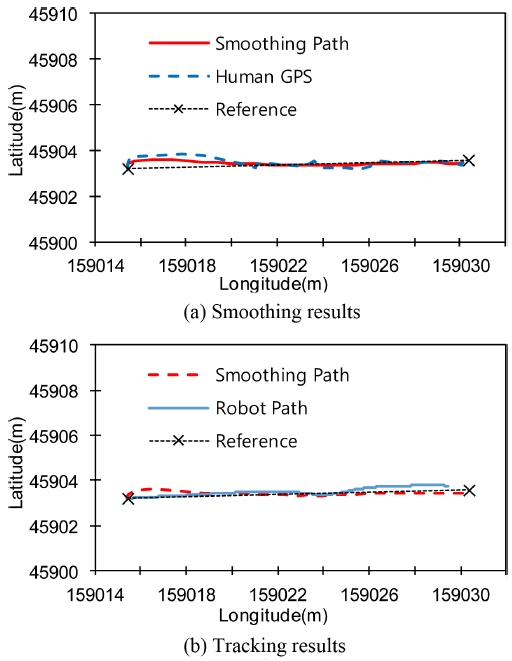
Table 2는 동일한 경로에서 10번의 실험을 통해 분석된 위치오차 특성을 나타낸다. 인간의 위치는 DGPS 정보를 그대로 사용하므로 최대 위치오차 0.62 m, 평균오차 0.18 m이고, 평활화된 경로는 최대 0.39 m, 평균 0.11 m이었다. 로봇의 추종경로는 최대 위치오차 0.28 m, 평균 0.13 m이었다. 인간 GPS의 위치오차보다 로봇의 추종오차가 더 양호한 것은 방향전환이 없는 직선추종상황에서 평활화에 의해 어느 정도 무작위 오차가 개선된 궤적을 추종하였기 때문으로 분석된다.
Table 2
Characteristics of position error
(unit: m)
Table 2
|
Human path |
Smoothing path |
Robot path |
|
4RMS |
0.18 |
0.11 |
0.13 |
|
Max. |
0.62 |
0.39 |
0.28 |
|
Std. |
0.16 |
0.09 |
0.90 |
4.1.2 곡선 경로 실험
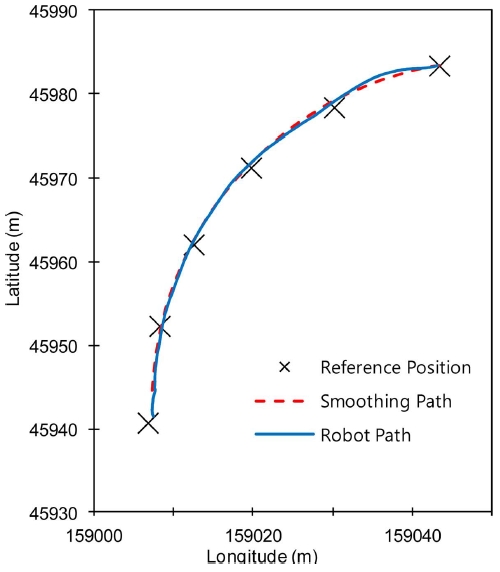
Fig. 8은 곡선경로 실험결과를 나타낸다. 그림에서 X는 기준위치, 빨간색 실선은 평활화 된 인간의 이동궤적, 파란색 실선은 로봇의 이동궤적을 나타낸다. 실험 결과 기준위치에 대한 평활화 된 인간궤적의 위치오차는 최대 1.12 m, 평균 0.60 m이며 기준위치에 대한 로봇의 위치오차는 최대1.31 m, 평균 0.68 m로 측정되었다.
Fig. 8Results of curve tracking
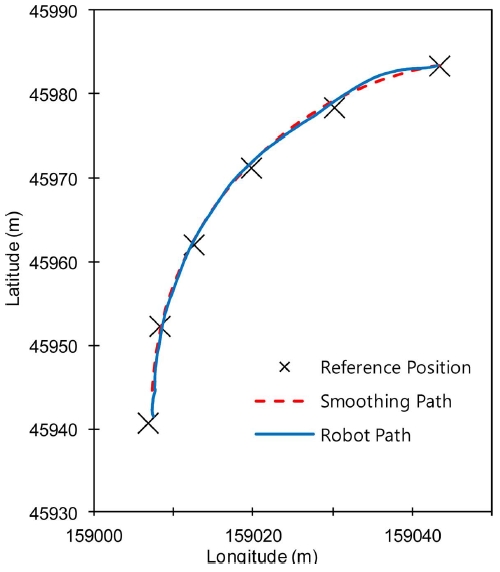
Table 3은 동일경로에서 10번의 실험을 통해 분석된 오차특성을 나타낸다. 평활화 된 인간궤적의 최대 위치오차 1.25 m, 평균은 0.60 m, 로봇의 최대 위치오차는 1.32 m, 평균은 0.70 m로서 로봇의 궤적이 인간궤적보다 오차가 크게 나타났는데, 이것은 곡선이동에서 발생하는 바퀴의 미끄러짐 등에 의해 로봇의 위치오차가 커질 뿐만 아니라 연속적인 방향전환에 따른 궤적추종 오차가 직선보다 커지기 때문이다. 전체적으로 직선 궤적 추종에 비해 곡선 궤적 추종 오차가 큰 것은 곡선경로추종이므로 궤적추종오차가 직선보다 커질 뿐만 아니라 인간 궤적 위치오차 자체가 직선의 경우보다 크게 발생하였기 때문이다. 따라서 인간추종 로봇의 성능을 더욱 향상시키기 위해서는 인간위치 자체에 발생하는 오차를 최소화할 필요가 있다.
Table 3
Characteristics of error for curved path
(unit: m)
Table 3
|
Smoothing path |
Robot path |
|
RMS |
0.62 |
0.70 |
|
Max. |
1.25 |
1.32 |
|
Std. |
0.47 |
0.57 |
4.2 실제환경 추종 실험
개발된 경로 평활화 방법 및 궤적추종 방법의 실제 옥외환경에 대한 적용 가능성을 확인하기 위해 실험을 수행하였다. 출발위치에서 도착위치까지의 이동거리는 약 300 m이며 고도 차는 약 15 m정도이다. 경로 상에 큰 건물 및 언덕, 그리고 기타 장애물로 인해 DGPS 위성신호 수신에 방해를 받을 수 있는 환경이다.
4.2.1 직접추종 실험
직접추종 실험 결과는
Figs. 9와
10과 같으며 그림에 나타낸 궤적들은 오차가 포함되어 있으므로 인간 및 로봇의 실제위치와는 차이가 있을 수 있다. 그 예로서
Fig. 9에서 점선은 인간의 궤적, 직선은 로봇의 궤적을 나타내는데 로봇이 이동한 궤적이 주차되어있는 차량 내부를 통과한 것처럼 보여지지만 실제 로봇은 도로를 주행하였다.
Fig. 9Experimental results of direct tracking

Fig. 10Performance of direct tracking
전체적으로 로봇은 인간을 무리 없이 추종하였으나 직접추종 방식 특성상 곡선경로에서는 로봇이 인간의 이동궤적보다는 인간의 현재 위치를 추적하므로 인간의 이동궤적과는 다소 차이가 나는 경로로 추종하였다.
4.2.2 궤적추종 실험
궤적추종 실험 결과는
Figs. 11-
13과 같다.
Fig. 11에서 점선은 평활화된 인간의 이동궤적, 실선은 로봇의 이동궤적을 나타낸다.
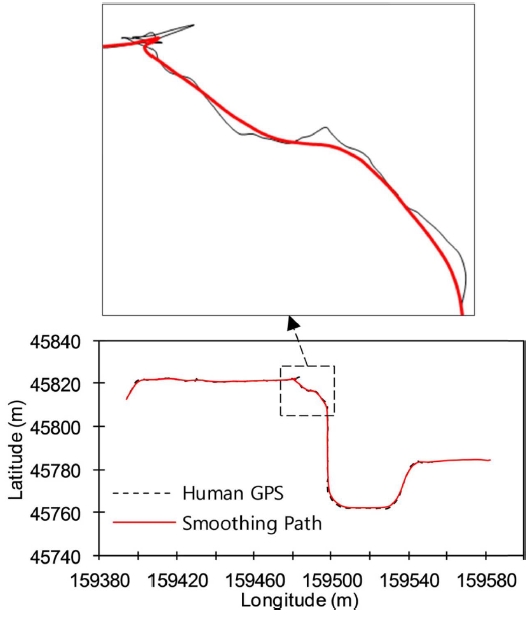
Fig. 12는 경로 평활화 결과로서 검은색 점선은 인간의 GPS 궤적, 빨간색 실선은 평활화된 인간의 궤적을 나타내며, 평활화된 대표적인 부분을 확대하여 그림의 상단에 나타냈다. 확대된 부분에서 인간의 위치오차가 크게 발생한 것은 주변의 큰 건물로 인해 GPS 위치오차가 크게 발생하였기 때문이다. 그러나 평활화를 통하여 어느 정도 급격한 위치 변화 및 오차를 상쇄시킬 수 있음을 알 수 있다. 따라서 궤적 평활화는 오차에 의해 경로 변화가 급격히 발생하는 환경에서 로봇 추종성능 향상에 중요한 역할을 할 수 있을 것으로 판단된다.
Fig. 11Experimental results of trajectory tracking

Fig. 12Smoothing results
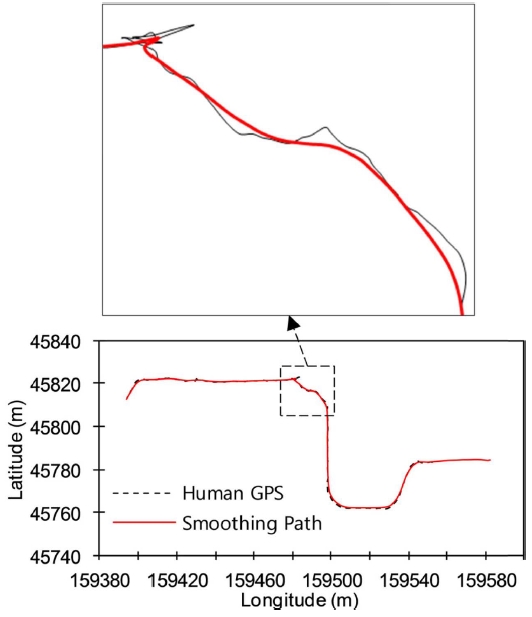
Fig. 13Performance of the trajectory tracking
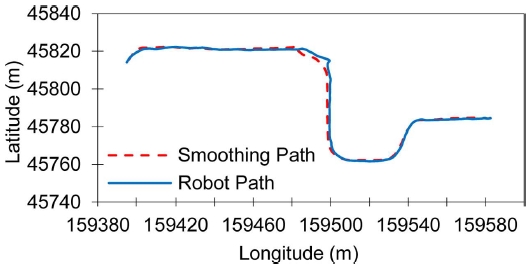
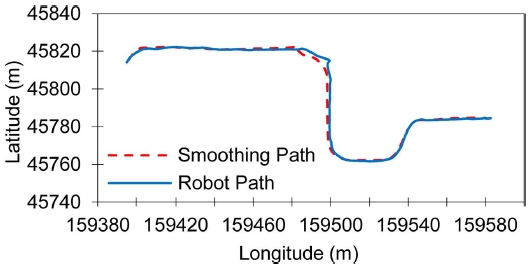
Fig. 13은 궤적추종 성능을 나타내는 것으로서 빨간색 실선은 평활화된 인간의 이동궤적, 파란색 실선은 로봇의 이동궤적이다. 직접추종 결과와 비교하면 직접추종 방식은 로봇이 인간의 현재 위치를 추종하므로 곡선추종 시에 인간궤적과의 편차가 두드러지게 나타난 반면, 궤적추종 방식은 로봇이 인간의 이동궤적을 추종하므로 곡선부분에서도 큰 편차 없이 추종하는 것으로 확인되었다.
4.3 장애물 회피실험
개발된 직접추종 방법 및 궤적추종 방법의 장애물 회피 성능을 확인하기 위한 실험을 수행하였다. 주행거리는 약 80 m정도이고 경로상에 가로 1.5 m, 세로 6 m 크기의 장애물이 두 개 존재한다. 실험은 인간이 장애물을 향해 움직이다가 장애물을 만나면 장애물의 외곽을 따라 이동하고 로봇이 인간의 이동궤적을 추종하는 방법으로 수행되었다.
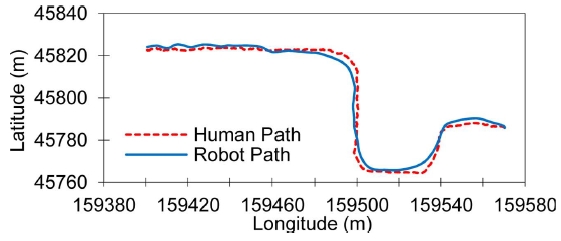
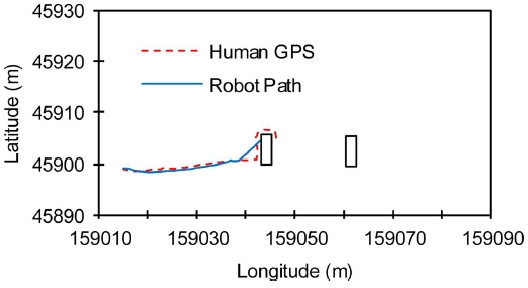
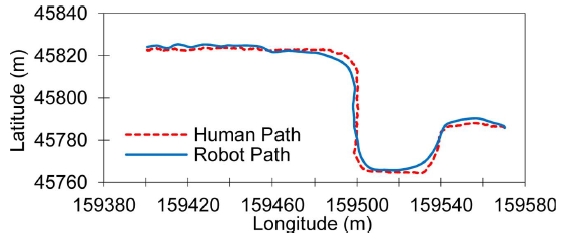
Fig. 14는 직접추종 방법을 이용한 장애물 회피 실험 결과이며, 검은색 직사각형은 장애물, 파란색 실선은 로봇의 이동궤적, 빨간색 점선은 인간의 이동궤적을 나타낸다.
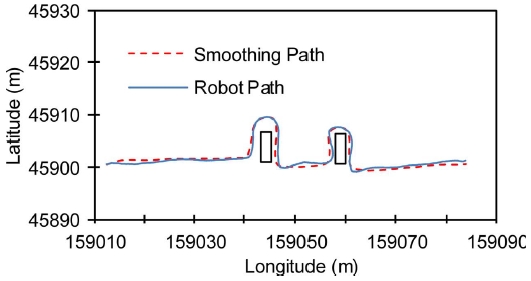
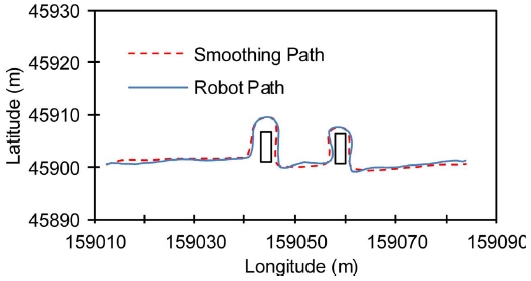
Fig. 15는 궤적추종 방법을 이용한 장애물 회피 실험 결과이며, 검은색 직사각형은 장애물, 파란색 실선은 로봇의 이동궤적, 빨간색 점선은 평활화 된 인간의 이동궤적을 나타낸다.
Fig. 14Results of obstacle avoidance (direct tracking)
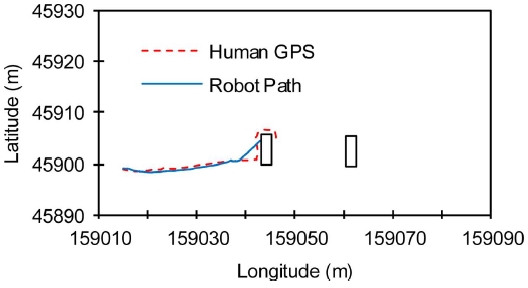
Fig. 15Results of obstacle avoidance (trajectory tracking)
직접추종 실험에서는 인간의 이동궤적이 아닌 현재 인간의 위치를 추종하므로,
Fig. 14에 나타난 것처럼 인간이 장애물의 건너편으로 지나간 상태에서 로봇이 그 위치를 추적함으로 인해 장애물에 충돌하였다. 반면 궤적추종 방법은 인간의 이동궤적을 그대로 추종하게 되므로
Fig. 15에 나타난 것과 같이 로봇은 장애물을 회피할 수 있음을 알 수 있다. 따라서 개발된 인간추종 방식을 이용함으로써 장애물이 존재하는 복잡한 실제 환경에서 효과적으로 인간 추종이 가능할 것으로 판단된다.
5. 결론
본 논문에서는 장애물 환경이나 경사지와 같이 복잡한 지형에서도 인간 추종이 가능하며 복수공동작업이 가능한 GPS 기반 인간 추종 방법에 대해 연구하였다. 이 방법은 GPS를 이용하여 측정된 인간 위치로부터 추종궤적을 생성하고 그 궤적을 평활화 하여 로봇이 그 궤적을 추종한다. 궤적추종은 인간의 현재 위치가 아닌 인간의 이동궤적을 추종하는 방식으로서 로봇은 형성된 인간궤적의 각 위치를 차례대로 추종하는 방법이다. 실험 결과 적절한 경로 평활화가 로봇의 추종 성능을 향상시키며 궤적 추종 방식을 이용하여 장애물 회피가 가능함을 확인하였다.
ACKNOWLEDGMENTS
이 논문은 2018년도 제주대학교 교원성과지원사업에 의하여 연구되었음.
REFERENCES
- 1.
Lim, J. H. and Leonard, J. J., “Mobile Robot Relocation from Echolocation Constraints,” IEEE Transactions on Pattern Analysis and Machine Intelligence, Vol. 22, No. 9, pp. 1035-1041, 2000.
10.1109/34.877524
- 2.
Lim, J. H. and Kang, C. U., “3-D Localization of an Autonomous Underwater Vehicle Using Extended Kalman Filter,” Journal of the Korean Society for Precision Engineering, Vol. 21, No. 7, pp. 130-135, 2004.
- 3.
Lim, J. H., “A Study on a Localization System for Tour Guide Robots,” Journal of the Korean Society for Precision Engineering, Vol. 29, No. 7, pp. 762-769, 2012.
10.7736/KSPE.2012.29.7.762
- 4.
Kwon, J. W., Park, M. S., Kim, T. U., Chwa, S. K., and Hong, S. K., “Localization of Outdoor Wheeled Mobile Robots using Indirect Kalman Filter Based Sensor Fusion,” Journal of Institute of Control, Robotics and Systems, Vol. 14, No. 8, pp. 800-808, 2008.
10.5302/J.ICROS.2008.14.8.800
- 5.
Kang, H. G., Yun, J. O., and Lee, J. H., “Localization for Mobile Robot by Selective Anchors in Indoor GPS and EKF,” Journal of Korea Robotics Society, Vol. 6, No. 1, pp. 58-68, 2011.
10.7746/jkros.2011.6.1.058
- 6.
Lim, J. H., Cho, I. H., and Park, J. H., “Human Following Robot based on GPS,” Proc. of KSPE Autumn Conference, pp. 50-51, 2016.
- 7.
Eriksson, J., Mataric, M. J., and Winstein, C. J., “Hands-Off Assistive Robotics for Post-Stroke Arm Rehabilitation,” Proc. of 9th International Conference on Rehabilitation Robotics, pp. 21-24, 2005.
- 8.
Okusako, S. and Sakane, S., “Human Tracking with a Mobile Robot using a Laser Range-Finder,” Journal of the Robotics Society of Japan, Vol. 24, No. 5, pp. 605-613, 2006.
10.7210/jrsj.24.605
- 9.
Morioka, K., Oinaga, Y., and Nakamura, Y., “Control of Human-Following Robot Based on Cooperative Positioning with an Intelligent Space,” Electronics and Communications in Japan, Vol. 95, No. 1, pp. 20-30, 2012.
10.1002/ecj.10391
- 10.
Hirai, N. and Mizoguchi, H., “Visual Tracking of Human Back and Shoulder for Person Following Robot,” Proc. of the IEEE/ASME International Conference on Advanced Intelligent Mechatronics, pp. 527-532, 2003.
- 11.
Yoshimi, T., Nishiyama, M., Sonoura, T., Nakamoto, H., Tokura, S., et al., “Development of a Person Following Robot with Vision Based Target Detection,” Proc. of IEEE/RSJ International Conference on Intelligent Robots and Systems, pp. 5286-5291, 2006.
- 12.
Lim, J. H. and Kang, S. K., “Non-Inertial Sensor-Based Outdoor Localization for Practical Application of Guide Robots,” Journal of the Korean Society for Precision Engineering, Vol. 34, No. 5, pp. 315-321, 2017.
10.7736/KSPE.2017.34.5.315
- 13.
Lim, J. H. and Kim, H. J., “Development of an Autonomous Guide Robot for Campus Tour,” Transactions of the Korean Society of Mechanical Engineers A, Vol. 41, No. 6, pp. 543-551, 2017.
- 14.
Cheng, S. H. and Higham, N. J., “A Modified Cholesky Algorithm Based on a Symmetric Indefinite Factorization,” SIAM Journal on Matrix Analysis and Applications, Vol. 19, No. 4, pp. 1097-1110, 1998.