ABSTRACT
In this paper, we designed and fabricated a hip joint torque sensor that can measure the torque applied to the hip joint of a walking assistant robot that can be used by a leg patient. To do this, we modeled the structure of the hip joint torque sensor so that it can be connected to the thigh link and the body of the walking assist robot. We calculated the rated torque of the hip joint torque sensor using computer simulation and determined the size of the torque sensor using a finite element program. The hip joint torque sensor was made by constructing a Wheatstone bridge and attaching a strain gauge. The characteristic test of the fabricated torque sensor was performed using a calibration device, and the reproducibility error and the nonlinearity error of the torque sensor were both less than 0.04%. Therefore, it is proposed that the developed hip joint torque sensor can be attached to the thigh link of the wearable walking assist robot, and the torque sensor can accurately measure the torque applied to the hip joint.
-
KEYWORDS: Torque sensor, Hip joint, Walking assist robot, Strain gage, Rated output, No-linearity error
-
KEYWORDS: 토크센서, 고관절, 보행보조로봇, 스트레인게이지, 정격출력, 비직선성오차
1. 서론
뇌졸중환자 등 편마비 다리환자가 정상인과 같은 보행을 하기 위해서는 보행보조로봇을 착용하고 고관절, 무릎관절, 발목관절을 회전시켜 주어야 한다. 즉, 왼쪽 다리가 편마비인 경우, 제자리에 서있는 상태에서 건측다리(건강한 다리)인 오른쪽을 먼저 시작할 때, 왼쪽다리(환측다리: 건강하지 않은 다리)의 발목관절과 고관절을 서로 반대 방향으로 회전시켜 주어야 한다. 이때 보폭에 따라 두 관절의 회전각은 각각 다르기 때문에 보행패턴에 의해 얻어진 회전각만큼 모터를 회전시켜 동작시킨다. 이와 같이 일정하게 각 관절을 회전시키면 보폭이 커지거나 작아지면 다리에 큰 힘이 가해지고 이로 인해 통증 등이 나타난다. 이와 같은 문제점을 해결하기 위해서는 보행시작 시 환측다리의 고관절과 발목관절의 각각의 토크는 증가되고, 이것들을 측정하여 서있는 상태의 토크값(서있는 상태에서 측정하여 저장한 값)이 되도록 각 관절의 모터를 제어해야 한다. 그러면 보행보조로봇이 환자의 다리에 무리한 힘이 가해지지 않으므로 통증을 느끼지 않는다.
T. Wanga 등
1은 자이로미터와 가속도계를 활용하여 다리환자를 보조할 수 있는 보행보조로봇을 설계 및 제작하는 연구를 수행하였고, 노인을 대상으로 보행보조로봇을 착용 후 보행훈련을 실시하였으며, 재활정도를 모니터링하였다. H. Terada 등
2은 허벅지 링크, 종아리 링크, 비 원형기어 등으로 구성되는 무릎재활을 위한 착용용 로봇을 개발하였고, 무릎의 굽힘각이 최대 130
o이다. H. Watanabe 등
3 은 급성 뇌졸중환자의 재활정도를 연구하기 위해 하이브리드 보행보조로봇을 사용하였고, 10명의 환자를 대상으로 보행훈련을 주당 12회, 1회당 20분간씩, 4주 동안 실시하였다. N. Karavas 등
4은 허벅지 링크와 종아리 링크로 구성되는 착용용 보행보조로봇을 설계 및 제작하였고, 이를 이용하여 환자를 대상으로 무릎관절 재활훈련을 실시하였다. S. Kubota 등
5은 기존의 착용용 보행보조로봇을 사용하여 다리환자들을 대상으로 회당 90분간, 1주일에 2회, 8주 동안 재활훈련을 실시하였다. M. Aach 등
6은 기존의 하이브리드 보행보조로봇을 사용하여 8명의 척추손상 다리환자의 재활훈련을 실시하였고, 훈련은 주당 5회, 90일 동안 실시되었다. M. Wu 등
7은 중증뇌졸중환자가 보행 중 다리에 하중을 감소시키기 위해 벨트로 환자의 상부를 고정하고, 줄로 다리를 당기는 형식의 보행보조로봇을 설계 및 제작하였고, 이 로봇은 평지나 불규칙한 지면에서 보행훈련을 수행할 수 없다. M. M. Martins 등
8은 다리환자들을 위해 기존의 보행보조로봇과 이들의 기술에 대해 설명하였고, 보행보조 기술에 대해 기술하였다. 그리고 V. Rajasekaran 등
9은 다리환자의 보행궤적을 연구하고 그 결과에 따라 환자를 훈련시키는 연구를 수행하였고, J. F. Zhang 등
10은 고관절과 무릎관절을 위치제어를 통해 재활운동시키는 보행보조로봇을 설계 및 제작하였으며, A. Pennycott 등
11은 특정한 보행보조로봇을 착용하고 평지를 보행할 때 넘어지지 않도록 자세를 제어하는 연구를 수행하였다.
지금까지 개발된 보행보조로봇은 서있는 자세에서 보행을 시작하거나 보행 시 보폭의 크기에 따라 고관절과 발목관절에 가해지는 토크를 측정하지 못하여 각 관절의 모터를 정확하게 제어하지 못하여 편마비환자가 자연스럽게 보행하지 못할 수 있다. 이와 같은 문제점을 해결하기 위해서는 고관절과 발목관절에 토크센서가 부착되어야 한다.
지금까지 개발된 다축센서에 포함된 토크센서는
12-16 보행보조로봇에 직접 부착하게 되면 보행보조로봇의 무게가 증가되어 각 관절에 부착되는 모터의 용량이 증가되는 등의 문제점이 발생될 수 있고, 보행보조로봇의 부피가 커져 보행 시 장해물 등에 부딪치는 등 많은 단점이 있다. 그리고 이것들은 x, y, z 방향의 힘과 토크 중 2개 이상이 한 몸체로 구성되었으므로 가격이 높다는 단점을 가지고 있다. 그리고 J. H. Joung 등
17은 과 H. S. Kim 등
18은 각각 종아리 링크와 허벅지 링크에 x, y, z 방향의 힘 Fx, Fy, Fz를 동시에 측정할 수 있는 3축 힘센서를 설계 및 제작하였고, 이것을 포함한 보행보조로봇을 제작하였다. 그래서 이 로봇은 착용 후 보행 시 발에 접촉되는 장해물에 의해 가해지는 힘을 감지하여 로봇을 안전하게 제어할 수 있다. 그러나 이 센서들은 고관절에 가해지는 정확한 토크를 감지하지 못하여 보행 시 보폭의 정도에 따라 고관절의 모터를 적절하게 제어할 수 없고, 고관절에 작용되는 큰 토크로 인해 모터에 가해지는 과부하를 방지할 수 없다. 그러므로 이와 같은 단점을 해결하는 방법 중 하나는 보행보조로봇의 허벅지 링크에 직접 토크센서를 설계 및 제작하여 고관절에 작용하는 정확한 토크를 측정해야 한다.
따라서 본 논문에서는 보행보조로봇을 착용하고 보행 시 고관절에 가해지는 토크를 측정하기 위한 토크센서를 설계 및 제작하였다. 고관절의 토크센서를 모델링하였고, 소프트웨어를 이용하여 토크센서의 감지부의 크기를 결정하였으며, 스트레인게이지를 부착하고 휘스톤브리지를 구성하여 토크센서를 제작하였다. 그리고 이 센서의 특성을 파악하기 위해 특성실험을 실시하였고, 보행보조로봇에 적용하기 위해 제어장치를 연결하여 교정을 실시하였다.
2. 고관절 토크센서 설계
2.1 고관절 토크센서의 보행보조로봇 적용
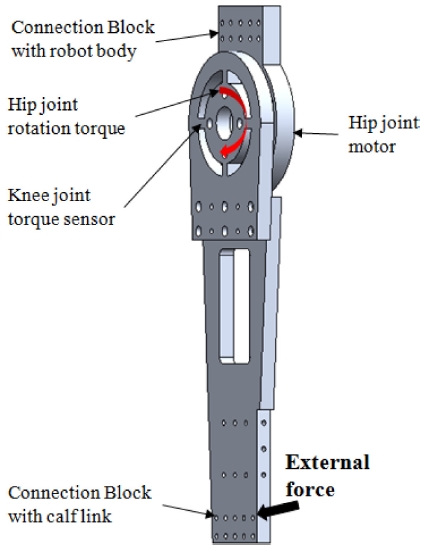
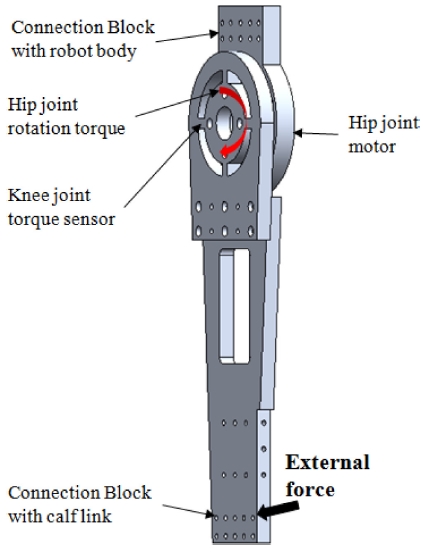
Fig. 1은 고관절 토크센서의 보행보조로봇 적용 원리를 나타내고 있고, 이것은 보행보조로봇의 허벅지 링크이다. 허벅지 링크는 로봇몸체와의 연결블록(Connection Block with Robot Body), 고관절 토크센서(Hip Joint Torque Sensor), 고관절 모터(Hip Joint Motor), 종아리 링크와의 연결블록(Connection Block with Calf Link) 등으로 구성된다. 로봇몸체 링크와의 연결블록은 로봇몸체와 고관절을 고정하고 몸에 착용하는 역할을 하고, 고관절 모터는 고관절 이하의 착용자의 다리와 고관절 이하의 보행보조로봇 기구, 모터 등의 무게를 회전시키는 역할을 수행하며, 종아리 링크와의 연결블록은 종아리 링크와 고정하는데 사용된다. 고관절 토크센서는 보행시작 및 보행 중 보폭에 따라 고관절에 가해지는 토크를 측정하고, 이 결과에 따라 고관절모터를 제어하는데 사용될 뿐만 아니라 외력이 크게 작용될 때 모터에 과전류 등이 흐르지 않도록 제어하는데 사용될 수 있다. 또한 그 센서는 장해물 등이 다리 및 고관절 이하의 로봇부위에 작용될 때 감지하여 대응 제어를 수행할 때 사용된다.
Fig. 1Application principle of hip joint torque sensor in walking assist robot
2.2 로봇의 고관절 회전력 시뮬레이션
편마비 다리환자가 보행보조로봇을 착용한 후 보행할 때 건측다리를 따라 환측다리가 자동으로 따라 보행하는 경우, 환측다리의 보행보조로봇의 고관절은 건측다리의 보폭에 따라 회전각이 다르다. 이와 같은 경우에는 고관절의 토크를 측정하여 토크의 양에 따라 고관절 모터의 회전을 제어해야 한다. 허벅지 링크에 부착되는 고관절 토크센서를 설계하기 위해서는 다리환자가 보행보조로봇을 착용하고 보행 시 고관절 이하의 무게를 회전시켜주는 회전력을 알아야 한다. 그리고 이 토크는 고관절 토크센서의 정격용량과 고관절 모터의 정격용량을 결정하는데도 이용된다.
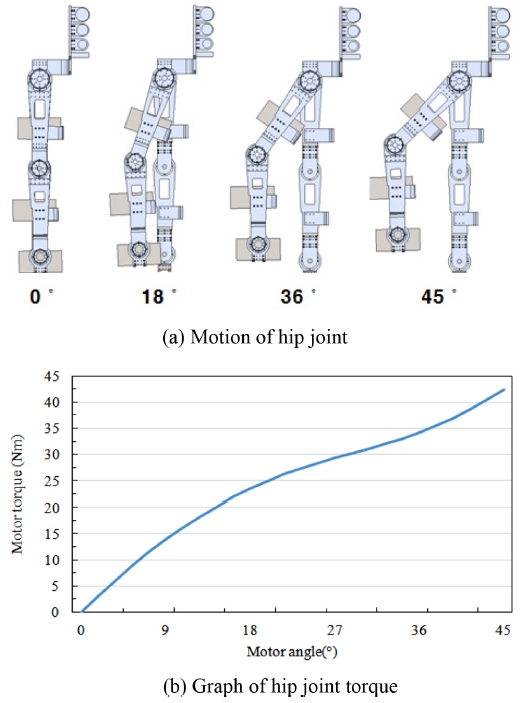
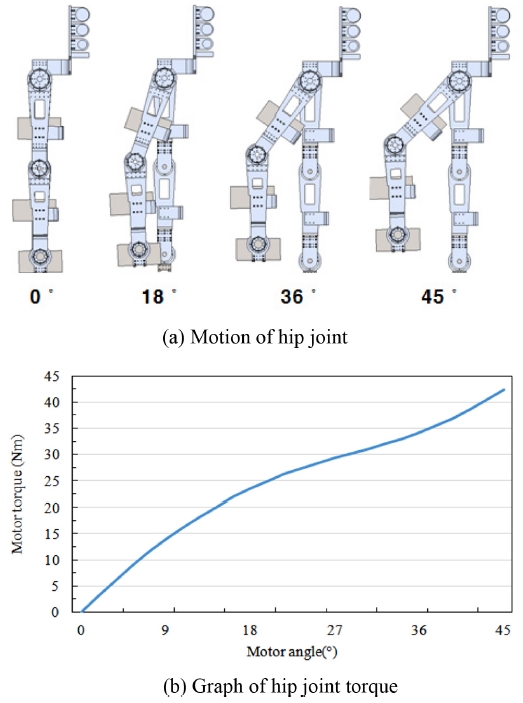
Fig. 2(a)는 다리환자가 보행보조로봇을 착용하고 보행 시 고관절에 가해지는 토크를 측정하기 위해 고관절 이하가 움직이는 모습을 나타낸 것이다. 사람이 보행 시 고관절 이하의 다리가 앞으로 움직이므로 보통 걸음을 기준으로 최대 움직이는 각도를 45
o로 보고 0
o- 45
o까지 나타냈다.
Figs. 2(b)는
2(a)와 같이 움직일 때, 고관절의 모터가 가해야 하는 토크를 나타낸 것이고, 고관절 각도가 9
o일 때 13.911 N·m, 18
o일 때 23.451 N·m, 27
o일 때 29.324 N·m, 36
o일 때 34.151 N·m, 45
o일 때 42.453 N·m이었으며, 예상했던 것과 같이 허벅지 링크가 위로 올라갈 수록(각도가 커질수록) 토크가 크게 나타났다.
Fig. 2Simulation result for hip joint
따라서 고관절 토크센서의 정격용량과 고관절 모터의 정격용량은 보행 시 시뮬레이션결과 45o일 때를 고려하여 결정하였고, 이와 같이 결정한 것은 토크센서를 제작하기 위한 감지부의 두께가 얇으면 사람의 자체 무게 및 외부의 충격에 파괴될 수 있기 때문이다. 고관절 토크센서의 정격용량은 시뮬레이션결과인 42.453 N·m 보다 안전율을 약 2배로 계산하여 80 N·m로 결정하였고, 고관절모터의 정격용량은 안전율을 약 1.5배로 계산하여 63 N·m로 결정하였다. 이와 같이 고관절 모터의 정격용량을 결정한 것은 모터 및 감속기의 무게와 크기 등을 고려하였다. 소프트웨어를 이용하여 시뮬레이션할 때 입력한 상수값들은 보행보조로봇의 허벅지 링크 무게를 0.620 kg, 종아리 링크의 무게를 0.560 kg, 발목 기구의 무게를 0.460 kg를 대입하였고, 사람의 성인의 허벅지 무게를 8 kg, 종아리 무게를 4 kg, 발 무게를 1 kg(측정값을 기준으로 대략 추정한 값임)을 대입하였고, 무릎관절 모터와 발목관절 모터의 무게를 각각 2 kg(실제 선정한 모터들의 무게임)를 대입하였다.
2.3 고관절 토크센서의 구조 및 구조해석
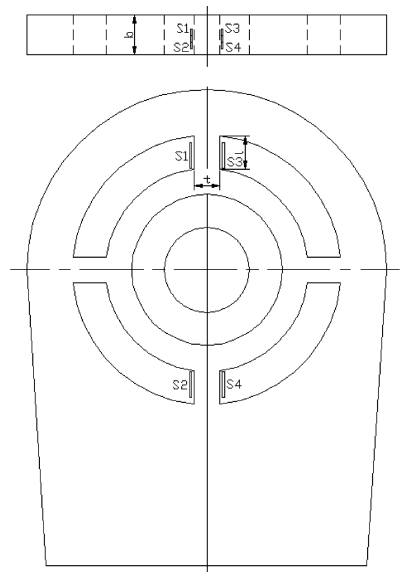
Fig. 3은 고관절 토크센서의 구조와 토크센서 제작을 위한 스트레인게이지 부착위치를 나타내고 있다. 토크센서는 평판에 4개의 보(Beam)가 중심축을 기준으로 90
o 간격으로 위치할 수 있도록 십자형 구조로 구성되었고, 이들 4개의 보는 고관절 토크센서의 감지부로 사용된다. 감지부에는 4개의 스트레인게이지가 부착되고, 이들은 휘스톤브리지를 구성하여 토크센서를 제작한다. 휘스톤브리지 구성 시 인장 스트레인게이지는 S1과 S4이고, 압축 스트레인게이지는 S2와 S3이다.
Fig. 3Structure of hip joint torque sensor and location of strain gage
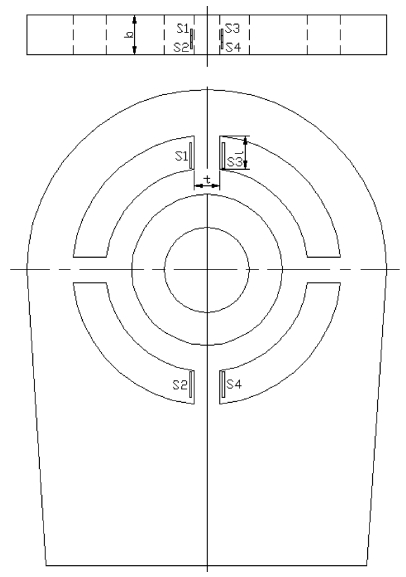
고관절 토크센서의 중심부에 고관절 모터 축이 연결되고, 모터축이 회전하면 토크센서에 회전력(토크)가 전달되고, 토크센서는 이 토크를 감지한다. 고관절 토크센서 감지부의 크기는 두께 t, 폭 b, 길이 l로 나타내고, 이것들은 토크센서의 설계 시 설계변수로 사용된다.
고관절 토크센서의 설계변수는 센서 감지부의 두께, 폭, 길이, 스트레인게이지 부착위치, 토크센서의 정격용량(정격토크), 정격변형률 등이다. 토크센서는 4개의 스트레인게이지를 이용하여 휘스톤브리지가 구성되고, 이 브리지의 출력인 토크센서의 정격변형률(μm/m) 식은 다음과 같이 쓸 수 있다.
17
여기서 ε은 토크센서의 정격변형률, εT1은 인장 스트레인게이지(T1: S1)의 변형률, εC1은 압축 스트레인게이지(C1: S2)의 변형률, εT2은 인장 스트레인게이지(T2: S4)의 변형률, εC2은 압축 스트레인게이지(C2: S3)의 변형률이다.
고관절 토크센서의 정격출력(mV/V)을 나타내는 식은 다음과 같이 쓸 수 있다.
17
여기서
Ei는 고관절 토크센서 휘스톤브리지의 입력전압(V),
Eo는 고관절 토크센서 휘스톤브리지의 출력전압(mV), K는 부착된 스트레인게이지의 상수(약 2.03),
ε는
식(1)로 부터 얻은 정격변형률(μm/m)이다.
고관절 토크센서의 설계변수는 정격변형률을 1000 mm/m, 정격출력을 0.5 mV/V, 정격용량을 80 N·m으로 결정하였다. 고관절 토크센서의 정격용량은 시뮬레이션결과에 의해 결정된 것이고, 이것의 정격용량과 출력은 상용화된 토크센서의 정격출력(2.0 mV/V)보다 1/4배인 0.5 mV/V로 결정하였다. 이와 같이 결정한 것은 다리환자의 불규칙한 보행 등을 고려하였고, 이 정격출력값은 다축 힘센서의 정격출력과 동일하다. 고관절 토크센서의 스트레인게이지 부착위치는 스트레인게이지의 크기 등을 고려하여 길이방향으로는 십자형으로 시작되는 지점으로부터 2 mm, 폭방향으로는 중심선상으로 결정하였고, 고관절 토크센서 감지부의 폭(b)은 12 mm, 감지부의 길이(l)는 10 mm로 결정하였다. 고관절 토크센서의 두께(t)를 결정하기 위해 위에서 결정한 설계변수들을 유한요소해석 소프트웨어에 대입하여 유한요소법을 이용하여 구조해석을 실시하였다. 이때 입력한 재료상수들은 고관절 토크센서의 재질을 알루미늄으로 선택하였으므로 종탄성계수가 210 GPa, 프와송의비가 0.3이고, 8절점 6면체를 선택하였다.
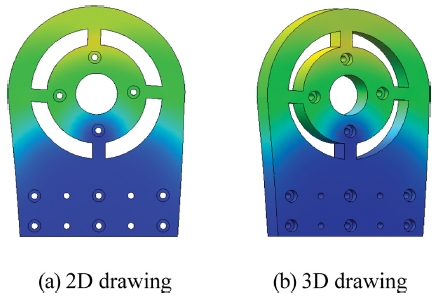
Fig. 4는 유한요소해석 소프트웨어를 이용하여 고관절 토크센서의 구조해석한 결과를 나타내고 있다. 구조해석을 위해 감지부의 길이방향의 격자크기를 0.5 mm이고, 폭방향의 격자크기를 1 mm로 나누었다. 고관절 토크센서 감지부 위의 변형률은
Fig. 4에 나타낸 것과 같이 토크센서의 중앙위치로부터 시작되는 지점, 즉 스트레인게이지의 부착위치 근처에서 크게 발생하였고, 이것은 토크센서의 구조를 모델링할 때 예상했던 것과 일치하였다.
Fig. 4Structural analysis result of the hip joint torque sensor
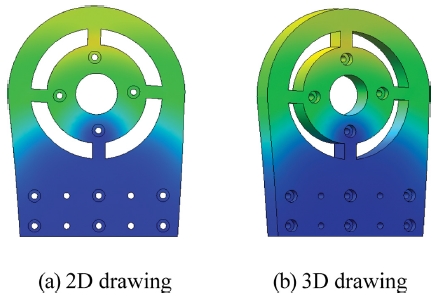
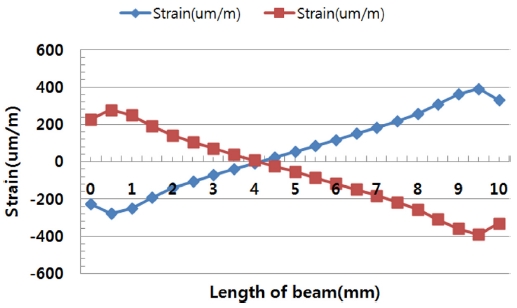
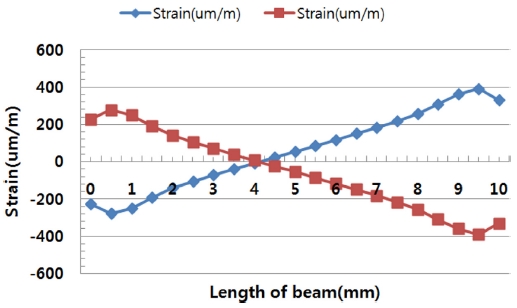
Fig. 5는 고관절 토크센서의 감지부위의 변형률을 나타내고 있다. 감지부 1개의 변형률 그래프가 변형률 0 μm/m를 기준으로 음과 양으로 나타난 것은 토크센서의 정격용량을 반시계방향으로 가했을 때 감지부인 보의 한쪽 면이 인장일 때 반대쪽 면이 압축으로 변하기 때문이다. 보의 양끝부근에서 변형률이 다소 감소한 것은 유한요소해석 소프트웨어의 끝 효과오차 때문이다. 보의 길이가 10 mm인 지점이 토크센서 구조에서 십자형의 중심부분에 가까운 지점이고 0 mm인 지점이 반대쪽 지점이다. 스트레인게이지 부착위치는 십자형 중심부분 근처 지점, 즉 8 mm 지점이고, 이 지점의 변형률은 256 mm/m 이었다.
Fig. 5Strain of hip joint torque sensor
인장 스트레인게이지
T1과
T2의 변형률
εT1과
εT2는 각각 256 μm/m이었고, 압축 스트레인게이지
C1과
C2의 변형률
εC1과
εC1은 각각 -256 μm/m이었다. 이 변형률들을 고관절 토크센서의 정격변형률
식(1)에 대입한 결과 1024 μm/m이었다. 이 결과를 설계 시 정격변형률 목표치인 1000 μm/m과 비교하면, 정격변형률 오차는 2.4%이었다. 이와 같은 오차가 발생한 것은 고관절 토크센서의 감지부 두께를 0.01 mm 단위로 가공할 수 없기 때문이다. 즉, 와이어 커팅 가공기의 가공오차를 고려하였기 때문이다. 그리고 유한요소해석 결과를 토대로 고관절 토크센서의 크기를 결정한 결과, 감지부의 두께(t)는 8.00 mm, 폭(b)는 12 mm, 길이(l)은 10 mm이었다.
3. 고관절 토크센서 제작 및 특성실험 결과
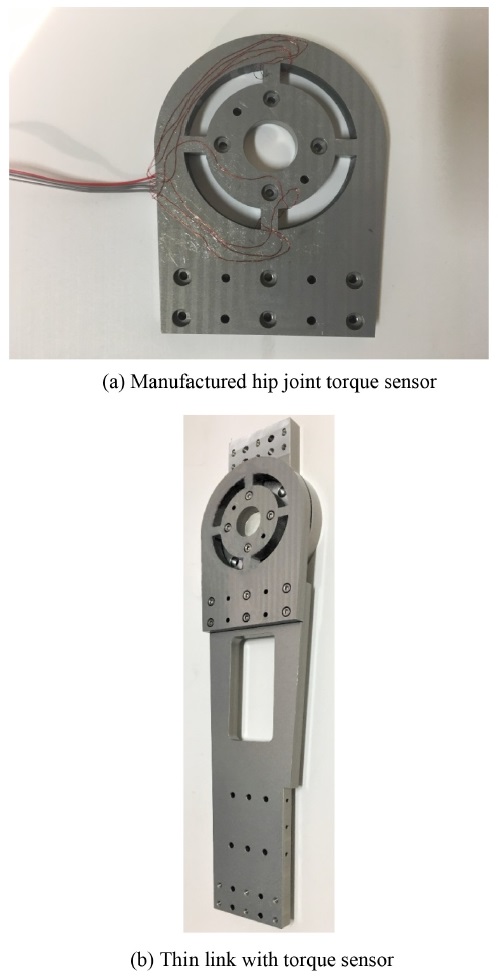
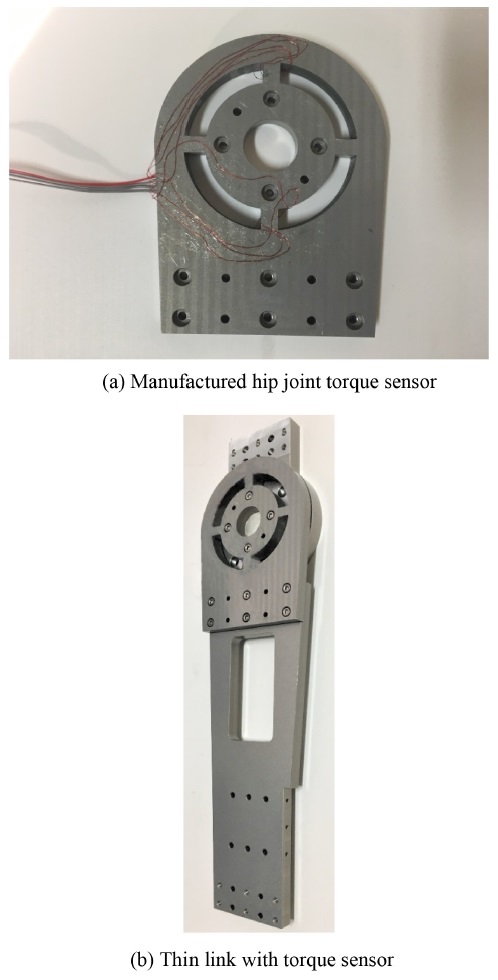
Fig. 6(a)는 제작된 고관절 토크센서의 사진을 나타낸 것이고,
Fig. 6(b)는 고관절 토크센서와 조립된 허벅지 링크를 나타내고 있다. 고관절 토크센서는
Fig. 3에 나타낸 고관절 토크센서의 스트레인게이지 부착위치에 스트레인게이지(N2A-13-S1452-350, 게이지 상수 2.03, 크기 3 × 5.2mm)를 순간접착제(M-Bond 200)을 이용하여 부착하였으며, 4개의 스트레인게이지를 이용하여 휘스톤브리지를 구성하여 제작하였다.
Fig. 6 Hip joint torque sensor manufactured
고관절 토크센서를 착용용 보행보조로봇의 허벅지 링크와 조립하여 사용하기 위해서는 특성실험을 실시하고 분석해야 하며, 그리고 착용용 보행보조로봇의 제어장치와 연결한 후 교정을 실시해야 한다.
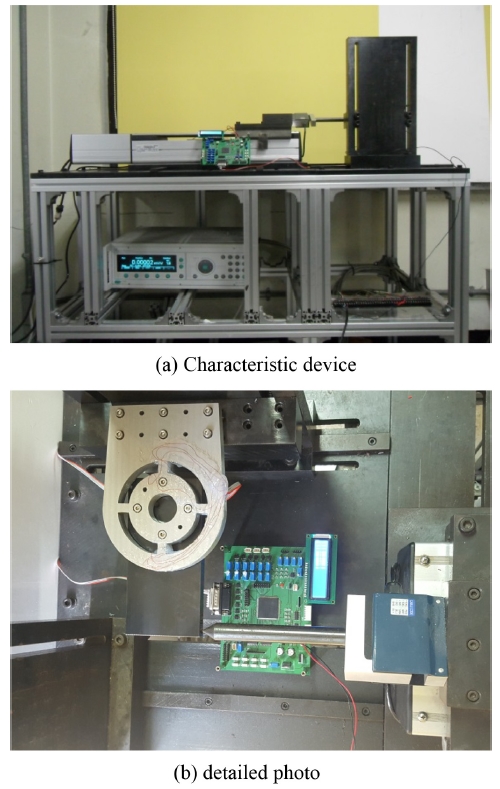
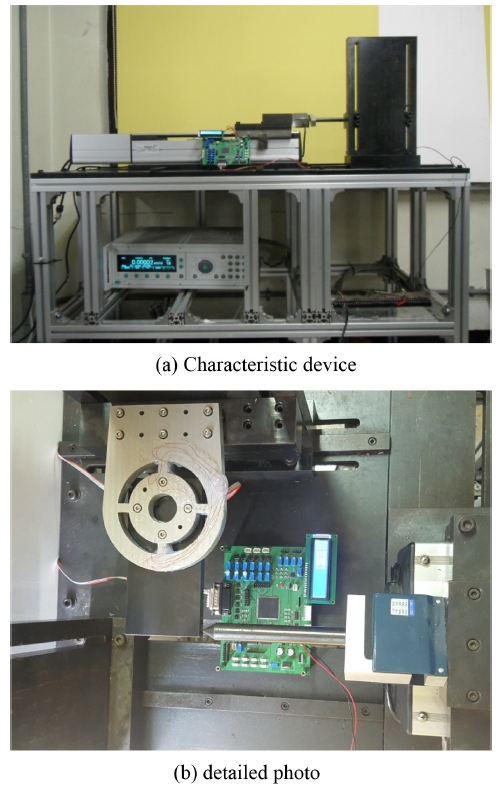
Fig. 7(a)는 고관절 토크센서의 특성실험 및 교정을 위한 실험장치(교정장치)
19를 나타내고 있고,
Fig. 7(b)는 특성실험 및 교정하는 장면의 상세 사진을 보이고 있다. 고관절 토크센서의 특성실험은 교정장치의 고정대에 고관절 토크센서를 고정한 후, 고관절 토크센서의 정격용량인 80 N·m를 교정장치의 힘발생장치를 이용하여 가하고, 측정장치(DMP40)을 이용하여 힘발생장치의 기준힘센서의 출력값과 고관절 토크센서의 값을 측정하였다. 특성실험은 이와 같은 과정을 3회 반복하여 실시하였고, 측정한 정격출력값들을 평균한 결과 0.5004 mV/V이었다.
Fig. 7 Characteristic device for testing and calibrating the hip joint torque sensor
유한요소해석한 결과의 정격출력은 정격변형률
식(1)에 스트레인게이지 부착위치의 변형률 256 μm/m를 대입하여 계산한 정격변형률 값 1024 μm/m와 사용한 스트레인게이지의 상수 2.03을 정격출력
식(2)에 대입하여 계산한 결과 0.5197 mV/V이었다. 유한요소해석 결과를 기준으로 실험한 정격출력의 오차를 계산한 결과 -3.71% 이내이었다. 이와 같은 오차는 토크센서 감지부의 가공오차와 스트레인게이지 부착위치 오차에 의한 것으로 판단된다. 그리고 고관절 토크센서의 재현도오차와 비직선성오차를 계산한 결과는 각각 0.04% 이내이었다. 이 결과는 기존에 개발된 토크센서의 그것들과 유사하므로 착용용 보행보조로봇의 허벅지 링크에 부착하여 사용할 수 있을 것으로 판단된다.
12-18
제작한 고관절 토크센서를 착용용 보행보조로봇에 부착하여 사용하기 위해서는 고관절 토크센서를 보행보조로봇의 제어장치와 연결하여 교정을 실시해야 한다. 고관절 토크센서의 교정은 무부하토크(0 N·m)에서 보행보조로봇 제어장치의 영점조정기를 이용하여 1500 mV가 출력되도록 조정하였고, 교정장치
19의 힘발생장치를 이용하여 토크센서에 정격용량인 80 N·m를 가하고, 보행보조로봇의 제어장치의 지시기에 증폭기를 이용하여 1440 mV가 출력되도록 조정하였다. 즉, 보행보조로봇 제어장치에 18 mV가 출력되면 1 N·m인 것이다. 이와 같이 보행보조로봇의 제어장치를 무부하 토크에서 1500 mV가 되도록 조정한 것은 제어장치의 출력범위가 0-3000 mV이고, 토크센서가 회전방향에 따라 양의 방향 토크와 음의 방향 토크가 출력되기 때문이다. 토크센서의 토크가 1 N·m일 때 18 mV로 조정한 것은 제어장치의 양의 방향 출력값이 최대 1500 mV이고 토크센서의 정격용량이 80 N·m이므로 최대로 출력할 수 있도록 조정하였기 때문이다. 즉, 토크센서에 80 N·m의 토크가 가해지면 제어장치에 1440 mV가 출력된다.
고관절 토크센서의 교정은 0 N·m부터 정격토크인 80 N·m까지, 8 N·m 단위로 총 10개의 토크를 증가순으로 교정장치
19의 힘발생장치를 이용하여 가했고, 보행보조로봇의 제어장치의 출력장치로 측정하였다. 이와 같은 과정을 3회 반복하여 실시하였고, 3회 측정한 측정값들을 이용하여 고관절 토크센서의 교정 재현도 오차와 비직선성오차를 계산한 결과는 각각 0.1% 이내이었다. 허벅지 링크에 부착하여 사용되는 고관절 토크센서는 일반계기에 속하고, 일반계기의 법정오차가 10% 이내이므로 본 논문의 고관절 토크측정장치는 보행보조로봇의 고관절에 가해지는 토크를 측정하는데 유용하게 사용될 수 있다고 판단된다.
4. 결론
본 논문에서는 다리환자가 사용할 수 있는 착용용 보행보조로봇의 고관절에 가해지는 토크를 측정할 수 있는 고관절 토크센서를 설계 및 제작하였다. 고관절 토크센서의 구조는 중심축을 기준으로 십자형으로 4개의 보가 위치하도록 모델링되었다. 제작된 고관절 토크센서의 특성실험결과, 토크센서의 재현도오차와 비직선성오차는 각각 0.04% 이내이었고, 이것은 기존에 개발한 토크센서의 그것과 비슷하였다. 그리고 고관절 토크센서를 보행보조로봇 제어장치에 연결한 후, 교정장치를 이용하여 교정을 실시한 결과, 재현도오차와 비직선성오차가 각각 0.1% 이내이었다. 그러므로 본 논문에서 개발한 고관절 토크센서는 허벅지 링크와 고정되어 착용용 보행보조로봇의 고관절에 가해지는 토크를 측정하는데 사용될 수 있다. 추후 연구에서는 개발한 고관절 토크센서를 착용용 보행보조로봇에 고정하여 다리환자가 보행 시 고관절에 가해지는 토크를 측정하고, 이 값을 이용하여 보행 시 보폭 크기와 상관없이 보행할 수 있도록 고관절모터를 제어하는 보행실험을 실시할 것이며, 고관절에 가해지는 과부하를 예측하여 고관절 모터의 정지 등을 미연에 방지하는 특성실험을 실시하는 것이다.
ACKNOWLEDGMENTS
이 논문은 2017년도 정부(미래창조과학부)의 재원으로 한국연구재단의 기초연구사업 지원을 받아 수행된 연구임(No. 2015R1A2A2A01002952).
REFERENCES
- 1.
Wang, T., Merlet, J.-P., Sacco, G., Robert, P., Turpin, J.-M., et al., “Walking Analysis of Young and Elderly People by Using an Intelligent Walker ANG,” Robotics and Autonomous Systems, Vol. 75, pp. 96-106, 2016.
10.1016/j.robot.2014.09.019
- 2.
Terada, H., Zhu, Y., Suzuki, M., Cheng, C., and Takahashi, R., “Developments of a Knee Motion Assist Mechanism for Wearable Robot with a Non-Circular Gear and Grooved Cams,” Mechanisms, Transmissions and Applications, Vol. 3, pp. 69, 2011.
10.1007/978-94-007-2727-4_6
- 3.
Watanabe, H., Tanaka, N., Inuta, T., Saitou, H., and Yanagi, H., “Locomotion Improvement Using a Hybrid Assistive Limb in Recovery Phase Stroke Patients: A Randomized Controlled Pilot Study,” Archives of Physical Medicine and Rehabilitation, Vol. 95, No. 11, pp. 2006-2012, 2014.
10.1016/j.apmr.2014.07.002
- 4.
Karavas, N., Ajoudani, A., Tsagarakis, N., Saglia, J., Bicchi, A., et al., “Tele-Impedance Based Assistive Control for a Compliant Knee Exoskeleton,” Robotics and Autonomous Systems, Vol. 73, pp. 78-90, 2015.
10.1016/j.robot.2014.09.027
- 5.
Kubota, S., Nakata, Y., Eguchi, K., Kawamoto, H., Kamibayashi, K., et al., “Feasibility of Rehabilitation Training with a Newly Developed Wearable Robot for Patients with Limited Mobility,” Archives of Physical Medicine and Rehabilitation, Vol. 94, No. 6, pp. 1080-1087, 2013.
10.1016/j.apmr.2012.12.020
- 6.
Aach, M., Cruciger, O., Sczesny-Kaiser, M., Höffken, O., Meindl, R. C., et al., “Voluntary Driven Exoskeleton as a New Tool for Rehabilitation in Chronic Spinal Cord Injury: A Pilot Study,” The Spine Journal, Vol. 14, No. 12, pp. 2847-2853, 2014.
10.1016/j.spinee.2014.03.042
- 7.
Wu, M., Hornby, T. G., Landry, J. M., Roth, H., and Schmit, B. D., “A Cable-Driven Locomotor Training System for Restoration of Gait in Human SCI,” Gait & Posture, Vol. 33, No. 2, pp. 256-260, 2011.
10.1016/j.gaitpost.2010.11.016
- 8.
Martins, M. M., Santos, C. P., Frizera-Neto, A., and Ceres, R., “Assistive Mobility Devices Focusing on Smart Walkers: Classification and Review,” Robotics and Autonomous Systems, Vol. 60, No. 4, pp. 548-562, 2012.
10.1016/j.robot.2011.11.015
- 9.
Rajasekaran, V., Aranda, J., Casals, A., and Pons, J. L., “An Adaptive Control Strategy for Postural Stability Using a Wearable Robot,” Robotics and Autonomous Systems, Vol. 73, pp. 16-23, 2015.
10.1016/j.robot.2014.11.014
- 10.
Zhang, J.-F., Dong, Y.-M., Yang, C.-J., Geng, Y., Chen, Y., et al., “5-Link Model Based Gait Trajectory Adaption Control Strategies of the Gait Rehabilitation Exoskeleton for Post-Stroke Patients,” Mechatronics, Vol. 20, No. 3, pp. 368-376, 2010.
10.1016/j.mechatronics.2010.02.003
- 11.
Pennycott, A., Hunt, K., Jack, L., Perret, C., and Kakebeeke, T., “Estimation and Volitional Feedback Control of Active Work Rate During Robot-Assisted Gait,” Control Engineering Practice, Vol. 17, No. 2, pp. 322-328, 2009.
10.1016/j.conengprac.2008.09.011
- 12.
Kim, H. and Kim, G., “Design of Two-Axis Force/Torque Sensor for Hip Joint Rehabilitation Robot,” Journal of Institute of Control, Robotics and Systems, Vol. 22, No. 7, pp. 524-529, 2016.
10.5302/J.ICROS.2016.16.0067
- 13.
Song, A., Wu, J., Qin, G., and Huang, W., “A Novel Self-Decoupled Four Degree-of-Freedom Wrist Force/Torque Sensor,” Measurement, Vol. 40, Nos. 9-10, pp. 883-891, 2007.
10.1016/j.measurement.2006.11.018
- 14.
Liu, S. A. and Tzo, H. L., “A Novel Six-Component Force Sensor of Good Measurement Isotropy and Sensitivities,” Sensors and Actuators A: Physical, Vol. 100, Nos. 2-3, pp. 223-230, 2002.
10.1016/S0924-4247(02)00135-8
- 15.
Jung, J. H. and Kim, G. S., “Design of Force Sensors of Rehabilitation Robot for Knee Rehabilitation,” Journal of Institute of Control, Robotics and Systems, Vol. 23 No. 1, pp. 46-52, 2017.
10.5302/J.ICROS.2017.16.0176
- 16.
- 17.
Joung, J. H. and Kim, G. S., “Design of a Force Sensor for Thigh Force Measurement of a Wearable Walking Robot,” Journal of the Korean Society for Precision Engineering, Vol. 34, No. 10, pp. 707-713, 2017
10.7736/KSPE.2017.34.10.707
- 18.
Kim, H. S. and Kim, G. S., “Development of Calf Link Force Sensors of Walking Assist Robot for Leg Patients,” Journal of Sensor Science and Technology, Vol. 26, No. 2, pp. 114-121, 2017.
10.5369/JSST.2017.26.2.114
- 19.
Kim, G.-S. and Yoon, J.-W., “Development of Calibration System for Multi-Axis Force/Moment Sensor and Its Uncertainty Evaluation,” Journal of the Korean Society for Precision Engineering, Vol. 24, No. 10, pp. 91-98, 2007.