ABSTRACT
In this paper, we design and fabricate a wearable walking-assist robot using a tendon-driven method. Most wearable walking-assist robots are designed using the method of the attaching of the motors to the hip, knee, and ankle joints. The robot needs the capacities of the motors attached to the hip and knee joints to equal the weights of the motors attached to the knee and ankle joints and the motor attached to the ankle, respectively. To solve these problems, we design and fabricate the wearable walking-assist robot using a tendon-driven method that rotates the joints by attaching the motors of the hip, knee, and ankle joints to the waist joint, and pulling it with a line. The gait patterns of a normal person are photographed and analyzed, thereby providing the ankle position (x, y) during the walking that is then calculated using the forward kinematic equation, while each joint angle is calculated using the inverse kinematic equation. As a result of the characteristic experiment of the wearable walking-assist robot, the resultant walking aspect is similar to that of the normal person.
-
KEYWORDS: Wearable walking assist robot, Tendon-driven method, Hip joint, Knee joint, Ankle joint
-
KEYWORDS: 착용용 보행보조로봇, 텐던방식, 고관절, 슬관절, 족관절
1. 서론
편마비 다리환자의 재활운동(Rehabilitation Exercise)이나 보행을 돕기 위해서는 착용용 보행보조로봇을 사용하는 경우가 점점 늘어가고 있는 추세이다. 착용용 보행보조로봇은 보통 빠른 동작을 위해 고관절(Hip Joint), 슬관절(Knee Joint), 족관절(Ankle Joint) 축에 직접 모터 혹은 유압 및 공압액츄에이터를 부착하는 직접구동장치(Direct-Driven Mechanism)로 구성한다. 직접구동장치를 이용한 보행보조로봇의 연구를 많이 진행되었다.
Camarillo
1은 연속체 로봇의 매니퓰레이터를 텐던방식을 이용하여 설계 및 제작하였다. Lee
2는 강성 제어 기능을 가진 텐던방식의 구동 로봇 핸드의 설계 및 제어 방법을 제시하였다. Ma
3은 뇌졸중환자의 하지재활로봇에 EMG센서, 고관절과 슬관절의 각도측정을 위한 광전도센서, 압전박막센서 등을 이용하여 지각시스템을 구성하여 시뮬레이션하였다. 사용된 하지재활로봇은 슬관절을 회전시키는 모터가 허벅지에 부착되어 모터의 회전운동을 직선운동으로 바꾸고 이 직선운동기구를 종아리 링크에 연결하여 회전운동으로 바꾸는 방식이다. Ishii
4는 간병인이 착용하고 환자를 돌볼 때 사용되는 보행보조로봇을 개발하였다. Suzuki
5는 건강한 사람의 활동을 향상시키고, 하반신 마비환자의 걸음걸이를 안전하게 하기 위해 생체신호를 이용하여 제어하는 알고리즘을 개발하였다. Nakamura
6은 무릎관절을 재활치료할 수 있도록 램과 시린더에 압력을 가하는 방식의 착용용 보조로봇 시스템을 설계하였고, 생체신호를 받아 제어할 수 있는 알고리즘을 제안하였다.
Horst
7은 착용용 뇌졸중환자 등의 다리 재활로봇을 설계하였고, 이 로봇은 토크작동기, 센서, 전자장치 등이 포함되었다. Park
8은 뇌졸중환자 등의 다리환자의 발목 재활을 위해 공압 인공근육 액츄에이터로 구동되는 착용용로봇을 개발하였다. Riener
9는 착용용 로봇을 이용하여 하지재활훈련을 수행시 환자의 보행평가를 결합함으로서 치료의 효과를 높이는 연구를 수행하였다. Kim
10은 인간의 동작을 분석하여 자유도를 선택하였고, 인간의 관절을 분석하였으며, 인간의 구조에 따라 외골격 로봇을 설계하였다. Hollander
11는 스프링기반의 선형 엑츄에이터로 사용되는 로봇 힘줄을 이용하여 보행보조로봇의 모터를 250 W에서 77 W로 줄이는 연구를 수행하였다. Kobayashi
12는 공장에서 일할 때 힘을 증폭하는 착용용 로봇을 설계하였다. Swift
13은 보행보조로봇을 유압 액츄에이터를 이용하여 고관절과 슬관절을 동작하도록 설계하였고, 환자에 직접 적용시켰다. Zhang
14는 뇌종중환자 등의 다리환자의 재활을 위해 5개 링크를 이용하여 4자유도 보행보조로봇을 설계하였고, 8명의 정상인과 3명의 뇌졸중환자를 대상으로 보행실험을 실시하였다. 이와 같이 로봇의 각 관절에 직접구동장치가 부착되면, 슬관절의 직접구동장치에 부착된 모터의 용량과 무게는 족관절의 직접구동장치의 무게에 의해 커져야 하고, 고관절의 직접구동장치에 부착된 모터의 용량과 무게는 슬관절과 족관절의 직접구동장치의 무게에 의해 커져야 한다. 이와 같은 문제점을 해결하기 위해 텐던구동장치(Tendon-Driven Mechanism)를 이용한 보행보조로봇을 설계하고자 한다.
본 논문에서는 텐던방식을 이용한 보행보조로봇을 설계 및 제작하였고, 특성실험을 실시하였다. 이를 위해 좌측과 우측의 보조로봇기구의 각 관절의 텐던구동장치를 허리에 장착하고, 각 관절에 풀리를 부착하여 텐던장치의 줄을 당기고 푸는 방법으로 회전시키는 방식의 보행보조로봇의 기계장치를 설계 및 제작하였다. 그리고 제작된 보행보조로봇의 동작특성실험을 실시하였다.
2. 착용용 보행보조로봇의 설계 및 제작
2.1 정상인의 보행시뮬레이션 및 결과
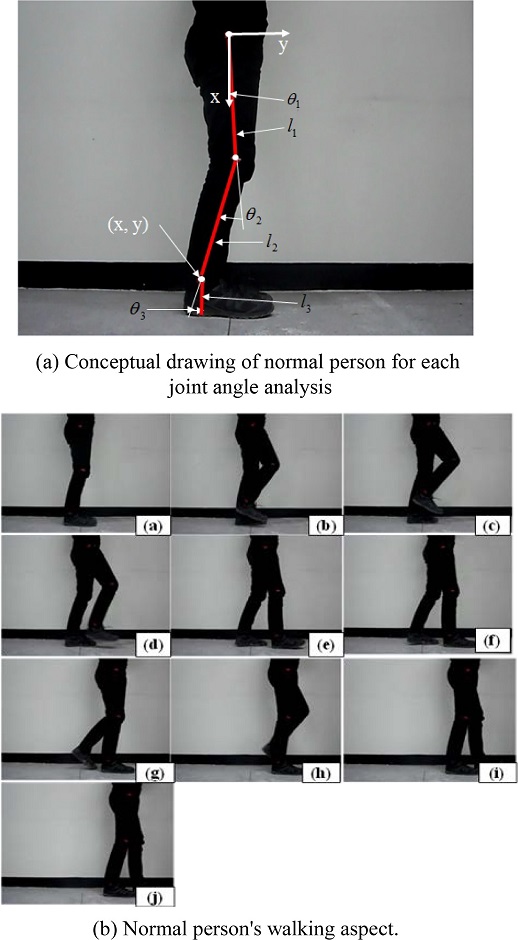
정상인이 보행보조로봇을 착용하고 보행하기 위해서는 보행하는 모습과 같이 착용용 보행보조로봇이 제어해야 한다. 그래서 정상인이 보행하는 모습을 촬영하였고, 우측다리와 좌측다리의 각각의 고관절각, 슬관절각, 족관절각을 분석하였다.
Fig. 1(a)는 관절각 분석을 위한 정상인의 개념도를 나타내고 있고, 기준좌표를 고관절점으로 결정하고,
Fig. 1에서 나타낸 것과 같이 고관절각, 슬관절각, 족관절각, 허벅지길이, 종아리길이, 발목길이 등을 결정하였다.
Fig. 1(b)는 정상인의 보행 모습을 나타내고 있으며, 이것은 우측다리부터 보행을 시작하여 좌측다리가 지면과 접촉할 때까지(a - j 단계)이다.
Table 1은
Fig. 1(b)에서 나타낸 정상인이 보행할 때 발생되는 우측다리와 좌측다리의 고관절각(
θ1), 슬관절각(
θ2), 족관절각(
θ3)과 관절3의 좌표값(x, y)를 나타내고 있다. 고관절각, 슬관절각, 족관절각은
Fig. 1(b)를 분석하여 나타낸 것이다. 실험에 참여한 정상인의 허벅지기구 길이
l1은 410 mm, 종아리기구 길이
l2는 400 mm, 발목길이
l3는 90 mm이다.
Fig. 1Normal person’s walking aspect
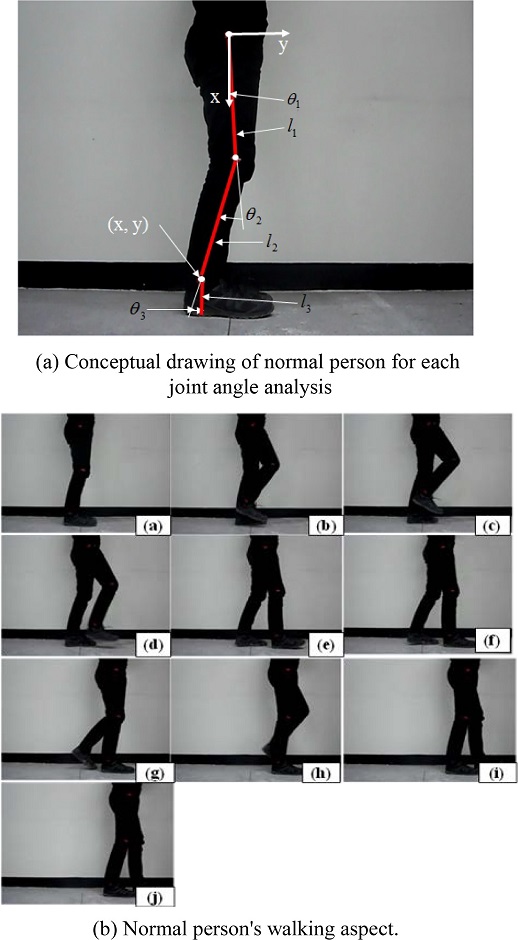
Table 1Strains from FEM analysis at each attachment location of strain-gages of each sensor of thigh link three-axis force sensor
Table 1
|
No. |
Position (x,y) |
Right leg |
|
x (mm) |
y (mm) |
H.J. angle
(θ1) |
K.J. angle
(θ2) |
A.J. angle
(θ3) |
|
a |
794.03 |
-90.19 |
2.8 |
-18.8 |
16.1 |
|
b |
701.52 |
-44.09 |
25.8 |
-59.6 |
10.4 |
|
c |
642.86 |
-28.73 |
34.3 |
-74.8 |
10.4 |
|
d |
702.34 |
167.47 |
40.0 |
-53.9 |
15.4 |
|
e |
795.96 |
74.78 |
14.5 |
-18.5 |
4.4 |
|
f |
800.92 |
55.95 |
11.5 |
-15.2 |
3.5 |
|
g |
800.46 |
-60.96 |
3.2 |
-15.3 |
12.9 |
|
h |
800.54 |
-27.15 |
6.5 |
-17.1 |
8.3 |
|
i |
800.60 |
-78.01 |
1.1 |
-13.5 |
12.2 |
|
j |
799.24 |
-87.00 |
0.7 |
-14.0 |
12.0 |
|
|
|
No. |
Position (x,y) |
Left leg |
|
x (mm) |
y (mm) |
H.J. angle
(θ1) |
K.J. angle
(θ2) |
A.J. angle
(θ3) |
|
a |
794.03 |
-90.19 |
2.8 |
-18.8 |
16.1 |
|
b |
794.03 |
-90.19 |
2.8 |
-18.8 |
16.1 |
|
c |
794.03 |
-90.19 |
2.8 |
-18.8 |
16.1 |
|
d |
794.03 |
-90.19 |
2.8 |
-18.8 |
16.1 |
|
e |
794.03 |
-90.19 |
2.8 |
-18.8 |
16.1 |
|
f |
794.03 |
-90.19 |
2.8 |
-18.8 |
16.1 |
|
g |
753.33 |
-150.02 |
7 |
-37 |
10 |
|
h |
701.01 |
-50.82 |
25.2 |
-59.6 |
10.4 |
|
i |
776.38 |
89.04 |
21.6 |
-30.5 |
10.3 |
|
j |
795.92 |
74.78 |
14.5 |
-18.5 |
4.4 |
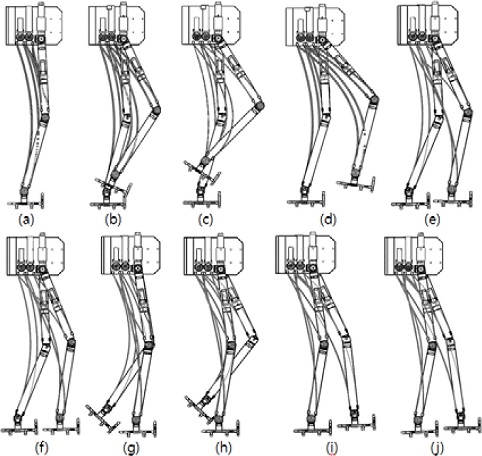
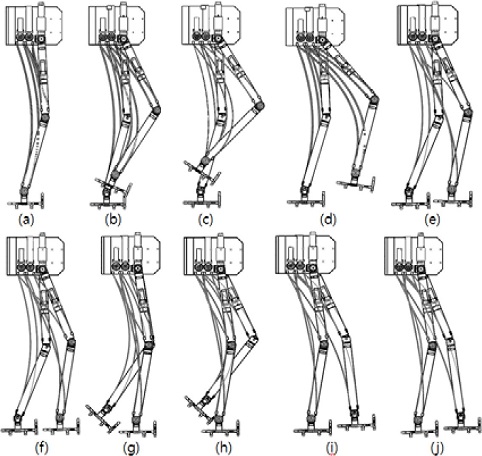
Fig. 2는
Table 1에 나타낸 정상인의 보행시 우측다리와 좌측다리의 각 관절각에 따른 보행보조로봇의 시뮬레이션 결과를 나타내고 있다. 시뮬레이션에서 착용용 보행로봇을 착용하고 보행 중 적용되는 각 관절의 각인 고관절각(
θ1), 슬관절각(
θ2), 족관절각(
θ3)은 a - j 단계까지의 정상인을 보행을 분석한 각을 적용하였다. 시뮬레이션 결과는
Fig. 1(b)에서 나타낸 정상인의 보행모습과 일치하는 것으로 나타났다. 그러므로 착용용 보행보조로봇을 제작한 후 평지에서 보행하는 데이터로 활용할 수 있을 것으로 판단된다.
Fig. 2Simulation results of walking assist robot for wear
2.2 텐던구동방식의 착용용 보행보조로봇의 설계
본 논문의 착용용 보행보조로봇의 특징은 슬관절과 족관절에 직접 부착되는 모터 및 모터드라이브를 허리의 몸체에 부착함으로써, 로봇의 다리무게를 줄일 수 있다. 즉 고관절과 슬관절을 구동하는 모터의 용량을 줄일 수 있다.
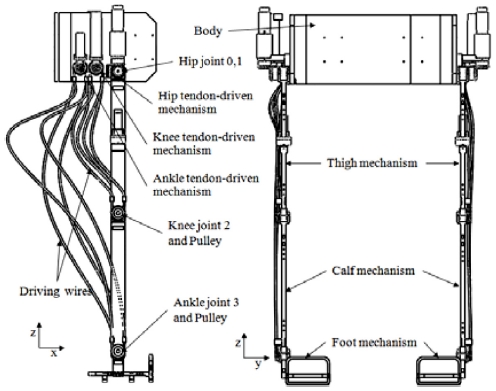
Fig. 3은 중증뇌졸중환자 등편마비 다리환자의 하지를 재활운동하기 위한 착용용 보행보조로봇의 개념도를 나타내고 있고,
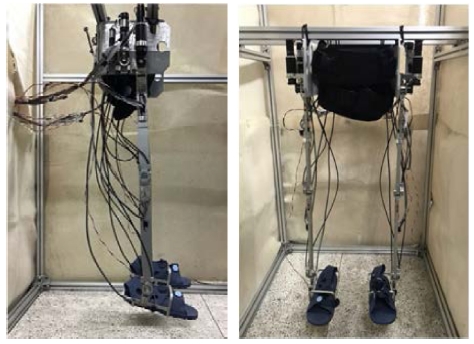
Fig. 4는 제작한 착용용 보행보조로봇이다. 착용용 보행보조 로봇의 구조는 몸체(Body), 고관절 텐던구동장치(Hip Tendon-Driven Mechanism), 슬관절 텐던구동장치(Knee Tendon-Driven Mechanism), 족관절 텐던구동장치(Ankle Tendon-Driven Mechanism), 허벅지기구(Thigh Mechanism), 종아리기구(Calf Mechanism), 발기구(Foot Mechanism) 등으로 구성된다. 몸체는 사람의 허리에 밸트를 사용하여 고정되고, 고관절 구동장치, 슬관절 구동장치, 족관절 구동장치 등을 고정시킨다. 고관절 텐던구동장치는 모터 및 모터 드라이브(모터모델: A-Max32(236669), 모터드라이브 모델: EPOS2 70/10(375711), 기어: GP 42C(203129), 기어비: 353 : 1, 정격토크: 30.0 Nm), 베벨기어 등으로 구성되었고, 제어장치의 제어에 의해 모터가 시계방향 및 반시계방향으로 회전되면 허벅지기구가 회전되어 허벅지를 고관절을 중심으로 앞뒤로 회전하여 보행할 때 허벅지에 힘을 가한다.
Fig. 3Concept of wearable walking assist robot
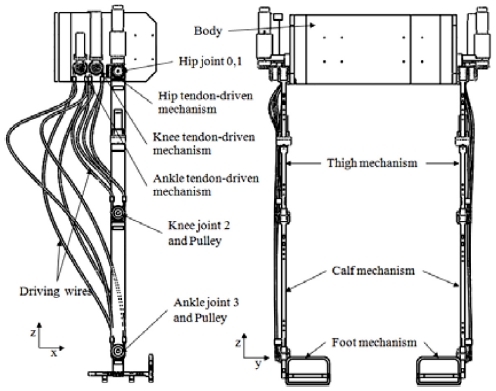
Fig. 4Manufactured of wearable walking assist robot
슬관절 텐던구동장치는 모터 및 모터 드라이브(모터모델: A-Max32(236669), 모터드라이브 모델: EPOS2 24/5(367676), 기어: GP 32C(166949), 기어비: 394 : 1, 정격토크: 11.2 Nm), 베벨기어, 구동 줄(Driving Wire) 등으로 구성되었고, 제어장치의 제어에 의해 모터가 시계방향 및 반시계방향으로 회전되면 구동 줄이 풀리를 통해 시계 및 반시계방향으로 회전되고 종아리기구가 회전되어 종아리를 슬관절을 중심으로 앞뒤로 회전하여 보행할 때 종아리에 힘을 가한다. 구동 줄은 자전거 브레이크에 사용되는 줄의 원리를 응용한 것이고, 자전거 브레이크 줄은 외관 튜브와 줄로 구성되었으며, 외관 튜브는 탄성이 있는 줄을 서로 접촉할 정도로 코일스프링과 같이 감겨져 제작되어 일정한 원호로 굽혀진다. 그리고 줄은 가는 선을 여러 가닥 꼬아 제작되어 강하고 잘 늘어나지 않는 특징을 가지고 있다. 외곽튜브 내부에 줄이 끼워져 있고, 외관튜브 양쪽을 고정한 후 줄을 당기면 힘을 전달할 수 있다.
족관절 텐던구동장치는 모터 및 모터 드라이브(모터모델: A-Max22(110165), 모터드라이브 모델: EPOS2 24/2 DC/EC(390003), 기어: GP 22C(143997), 기어비: 389:1, 정격토크: 0.8 Nm), 베벨기어, 구동 줄 등으로 구성되었고, 제어장치의 제어에 의해 모터가 시계방향 및 반시계방향으로 회전되면 구동 줄이 풀리(Pulley)를 통해 시계 및 반시계방향으로 회전되고 발기구가 회전되어 발을 족관절을 중심으로 앞뒤로 회전하여 보행할 때 발에 힘을 가한다. 허벅지기구는 허벅지링크 등으로 구성되었고, 상부로는 고관절 구동장치와 연결되어 있으며, 하부로는 종아리 기구와 연결되었다. 종아리기구는 종아리링크, 풀리 등으로 구성되었고, 풀리는 슬관절 구동장치의 모터의 회전에 따라 구동 줄을 시계방향과 반시계방향으로 당김으로써, 종아리기구를 회전시킨다. 발기구는 발목링크, 풀리 등으로 구성되었고, 풀리는 족관절 구동장치의 모터의 회전에 따라 구동 줄을 시계방향과 반시계방향으로 당김으로써 발기구를 회전시킨다.
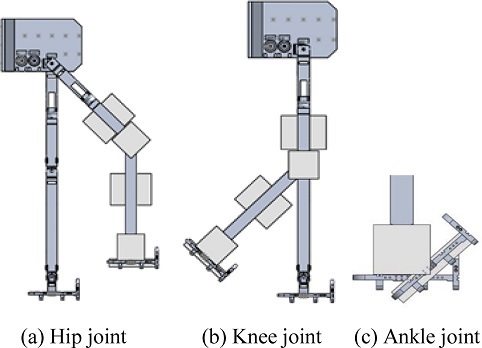
Fig. 5는 소프트웨어를 이용한 각 관절의 토크계산을 위한 동작을 나타내고 있고,
Fig. 5(a)는 고관절의 토크를 계산하기 위해 허벅지기구를 앞으로 45
o 올린 모습,
Fig. 5(b)는 슬관절의 토크를 계산하기 위해 종아리기구를 뒤로 45
o 올린 모습,
Fig. 5(c)는 족관절의 토크를 계산하기 위해 발기구를 앞으로 45
o 올린 모습을 각각 나타내고 있다. 텐던구동방식과 직접구동방식에 따른 각 관절의 토크를 계산하기 위하여 고관절, 슬관절, 족관절의 각각의 모터와 감속기의 무게를 각각 0.760 kg, 0.460 kg, 0.220 kg, 허벅지기구, 종아리기구, 발기구의 무게
15를 각각 0.622 kg, 0.558 kg, 0.269 kg, 허벅지기구, 종아리기구, 발기구의 링크길이를 각각 410 mm, 400 mm, 90 mm, 그리고 정상인의 허벅지, 종아리, 발의 무게를 각각 5 kg, 5 kg, 1 kg으로 결정하였다. 각 관절의 토크는 허벅지기구, 종아리기구, 발기구의 각각의 링크가 45
o 경사각을 이루고 있을 때의 조건과 이들 값들을 소프트웨어에 대입하여 계산되었다.
Fig. 5Motion for torque calculation of each joint using software
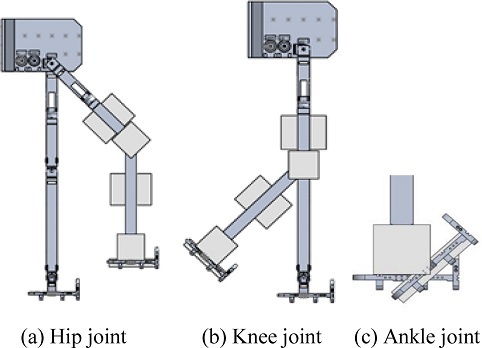
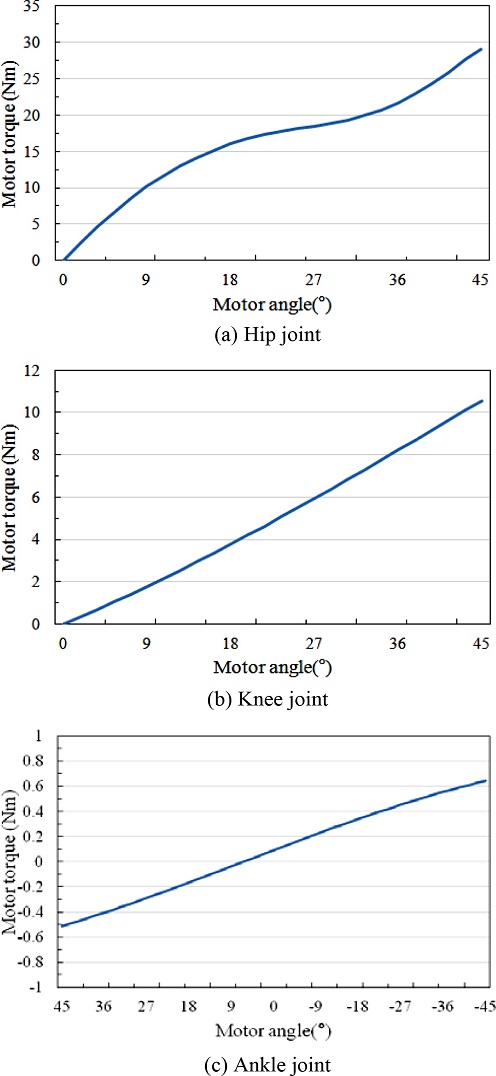
Fig. 6은 텐던구동방식을 이용한 보행보조 로봇의 각 관절의 계산된 토크값이다.
Fig. 6(a)는 0
o에서 45
o까지 고관절 모터가 회전할 때의 계산된 토크값을 그래프로 나타낸 것이고, 45
o일 때 최대토크 29.122 Nm로 계산되었다.
Fig. 6(b)는 0
o에서 45
o까지 슬관절 모터가 회전할 때의 계산된 토크값을 그래프로 나타낸 것이고, 45
o일 때 최대토크 10.575 Nm로 계산되었다. 그리고
Fig. 6(c)는 45
o에서 -45
o까지 족관절 모터가 회전할 때의 계산된 토크값을 그래프로 나타낸 것이고, ±45
o일 때 최대토크 ±0.642 Nm로 계산되었다.
Fig. 6Calculated torque value of each joint motor for tendon-driven method
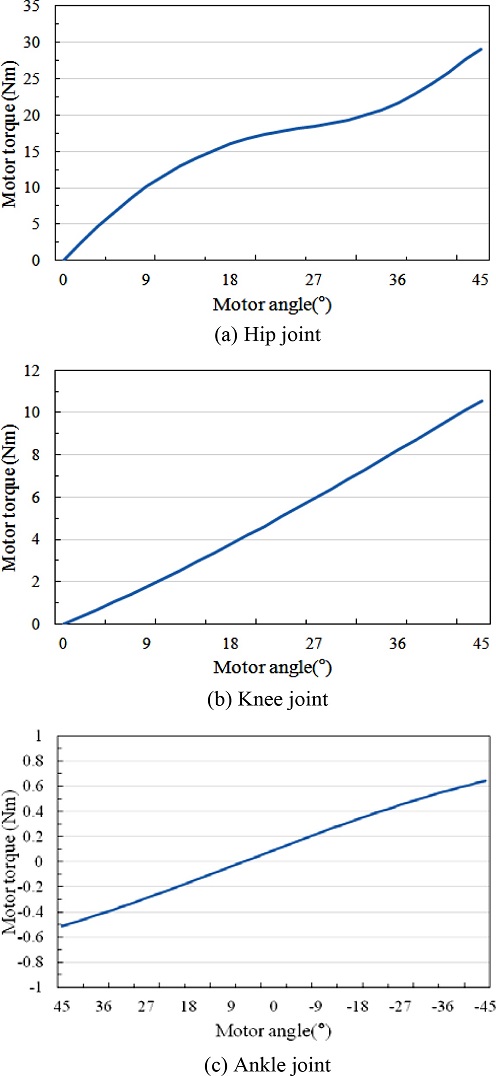
Table 2는 텐던구동방식과 직접구동방식의 고관절, 슬관절, 족관절의 계산된 토크를 나타내고 있고, 직접구동방식도 텐던구동방식과 같은 방법으로 소프트에어를 이용하여 계산하였다. 본 논문에서 고안한 텐던구동방식의 토크가 직접구동방식의 토크 보다 고관절과 슬관절의 토크는 각각 3.855 Nm과 0.855 Nm 작게 나타났다. 그러므로 본 논문의 텐던구동방식을 적용한 착용용 보행보조로봇의 고관절과 슬관절의 모터용량은 각각 슬관절과 족관절, 족관절에 부착되는 각각의 모터와 감속기의 무게에 상응하는 정격토크 용량만큼 줄일 수 있다.
Table 2Torque calculation of the hip joint, the angle of the knee joint according to driving method
Table 2
|
Method |
Hip joint
torque
(Nm) |
Knee joint
torque
(Nm) |
Ankle joint
torque
(Nm) |
|
Tendon-driven |
29.122 |
10.575 |
0.642 |
|
Direct-driven |
32.977 |
11.430 |
0.642 |
3. 착용용 보행보조로봇의 특성실험
3.1 착용용 보행보조로봇의 보행제어 알고리즘
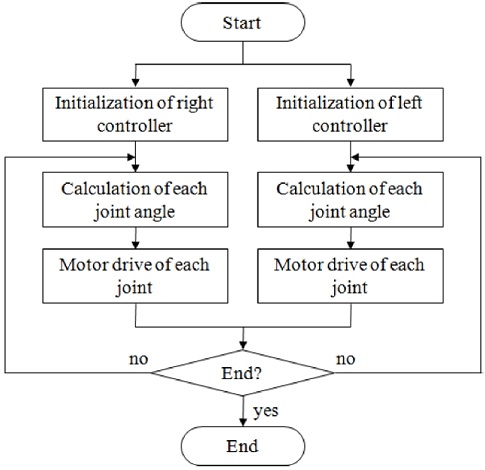
Fig. 7은 착용용 보행보조로봇을 착용한 후 보행 중 보행경로에 따른 보행 제어흐름도를 나타내고 있다. 본 착용용 보행보조로봇의 제어장치는 오른쪽 다리 제어장치와 왼쪽 다리 제어장치를 별도로 사용하므로 제어흐름도에서도 구분한다. 착용용 보행보조로봇의 제어는 첫째, 두 대의 제어장치를 초기화하고, 각 관절의 각은
Table 1의 a - j 단계까지 값들을 적용한다. 둘째, 각 단계의 3개의 관절각이 결정되면 각 단계마다 100 등분한 각에 상응하는 3개 관절을 제어하기 위한 모터드라이브에 입력할 펄스값을 계산하고, 이것을 모터드라이브에 입력하여 모터를 회전시킨다. 보행은 정지신호가 입력될 때까지 반복된다. 고관절모터의 감속기 축을 1
o 회전시키기 위해서는 1펄스당 모터회전각이 0.01538
o이고 감속기의 감속비가 353 : 1이므로 펄스 22951개가 필요하다. 즉, 모터에 펄스 1개를 입력하면 로봇 관절과 연결되는 감속기 축은 0.00004357
o 회전한다. 슬관절은 1펄스당 모터회전각이 0.009756
o이고 감속기의 감속비가 394 : 1이므로 펄스 40385개가 필요하며, 조관절은 1펄스당 모터회전각이 0.04917
o이고 감속기의 감속비가 389 : 1이므로 펄스 7911개가 필요하다.
Fig. 7Walking control flow chart according to walking path during walking
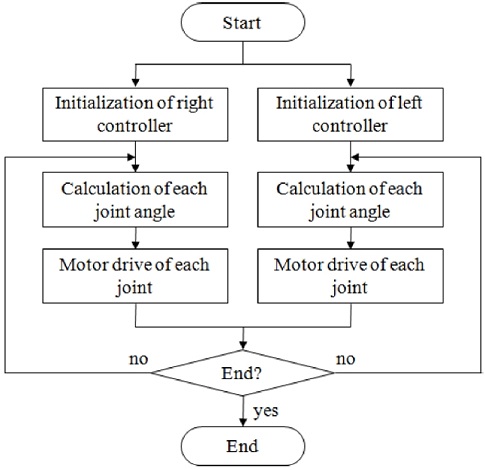
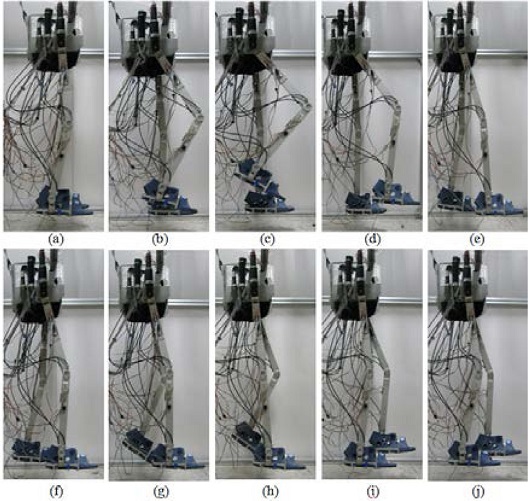
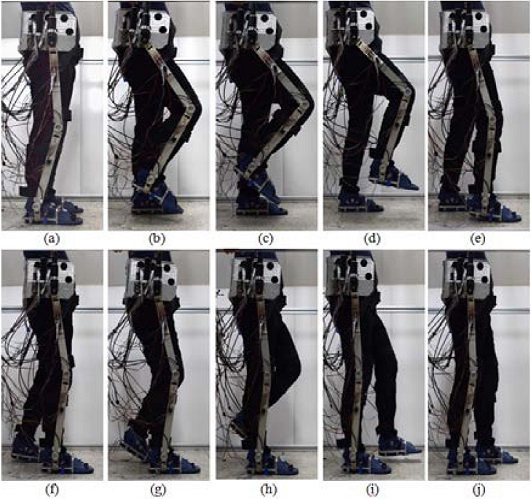
Fig. 8은 정상인이 보행할 때와 같이 착용용 보행보조로봇의 우측다리와 좌측다리의 각 관절각을 구동한 결과를 나타내고 있고, 실험을 위해 로봇의 몸체 부분을 실험대에 고정하여 로봇의 발이 지면에 접촉하지 않도록 하였다. 제작된 착용용 보행보조로봇의 보행특성실험 결과는
Fig. 2(b)에 나타낸 정상인이 보행하는 모습과 유사하게 나타났다.
Fig. 8Walking aspect according to the hips angle, knee angle, and ankle angle during normal person's walking
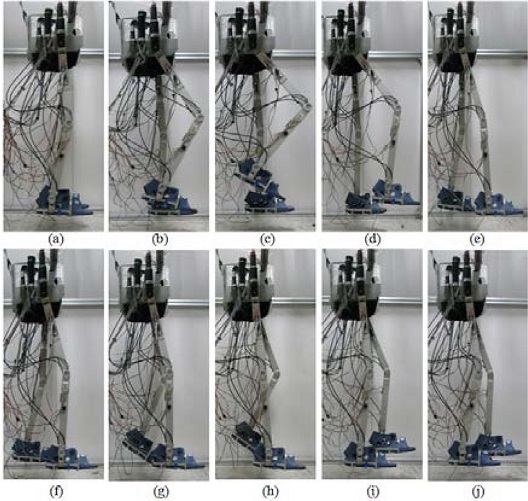
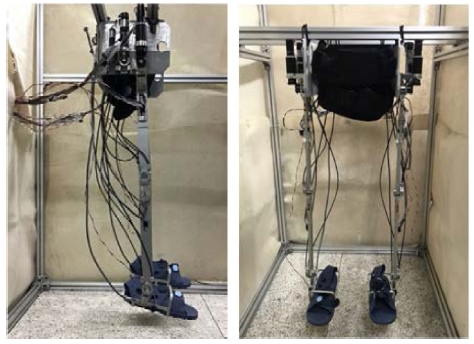
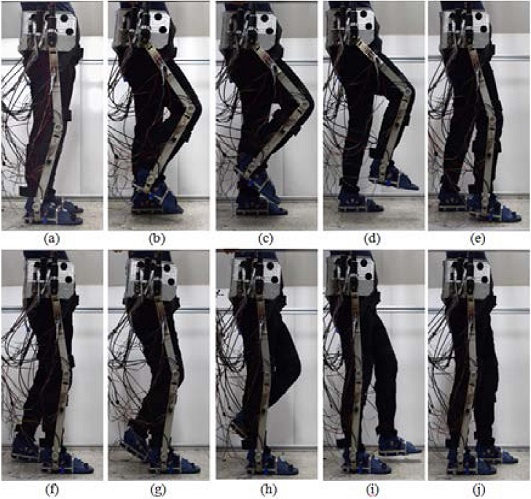
Fig. 9는 보행보조로봇을 착용한 정상인의 보행모습을 나타내고 있고, 평지에서 안전하게 보행할 수 있었다. 텐던구동방식은 보통 구동 줄과 풀리를 이용하기 때문에 풀리를 좌우로 회전할 때 미소한 클리어런스(회전각 오차)가 발생한다. 이와 같은 오차는 착용용 보행보조로봇을 착용하고 보행할 때 매우 정밀하게 제어하지 않아도 몸의 유연성 등으로 인해 대처가 가능하므로 문제가 없는 것으로 판단된다. 따라서 본 논문에서 제작한 착용용 보행보조로봇을 정상인 및 편마비 다리환자가 착용한 후 평지에서 보행할 수 있을 것으로 판단된다.
Fig. 9Walking of a normal person wearing a walking robot
4. 결론
본 연구에서는 텐던구동장치를 이용하여 착용용 보행보조로봇을 설계 및 제작하였다. 정상인의 보행을 사진을 촬영하여 분석하였고, 보행시뮬레이션을 실시하였으며, 그 결과 정상인의 보행과 비슷한 모습을 보였다. 그리고 정상인의 다리 무게와 로봇의 허벅지기구 이하의 무게를 고려하여 고관절 모터, 슬관절 모터, 족관절 모터를 선정하였고, 착용용 보행보조로봇을 설계하고 제작하였다. 제작된 착용용 보행보조로봇은 텐던구동장치를 이용함으로써, 직접구동장치보다 고관절과 슬관절의 모터용량을 줄일 수 있었고, 착용용 보행보조로봇 자체의 보행 특성실험결과는 정상인과 유사하게 나타났다. 그리고 정상인이 보행보조로봇을 착용한 후 평지에서 안전하게 보행할 수 있었다. 그리므로 본 논문에서 제작한 보행보조로봇은 편마비환자가 착용하고 평지에서 보행이 가능할 것으로 판단된다. 추후 연구로는 정상인을 대상으로 임상실험을 마친 후 편마비 다리환자에게 적용하는 것이다.
ACKNOWLEDGMENTS
이 논문은 2016년도 정부(미래창조과학부)의 재원으로 한국연구재단의 기초연구사업 지원을 받아 수행된 연구임(No. 2015R1A2A2A01002952)
REFERENCES
- 1.
Camarillo, D. B., Milne, C. F., Carlson, C. R., Zinn, M. R., and Salisbury, J. K., “Mechanics Modeling of Tendon-Driven Continuum Manipulators,” IEEE Transactions on Robotics, Vol. 24, No. 6, pp. 1262-1273, 2008.
10.1109/TRO.2008.2002311
- 2.
Lee, Y.-T., Choi, H.-R., Chung, W.-K., and Youm, Y., “Stiffness Control of a Coupled Tendon-Driven Robot Hand,” IEEE Control Systems, Vol. 14, No. 5, pp. 10-19, 1994.
10.1109/37.320882
- 3.
Ma, W., Zhang, X., and Yin, G., “Design on Intelligent Perception System for Lower Limb Rehabilitation Exoskeleton Robot,” Proc. of 13th Ubiquitous Robots and Ambient International Conference, pp. 587-592, 2016.
10.1109/URAI.2016.7625785
- 4.
Ishii, M., Yamamoto, K., and Hyodo, K., “Stand-Alone Wearable Power Assist Suit–Development and Availability,” Journal of Robotics and Mechatronics, Vol. 17, No. 5, pp. 575-583, 2005.
10.20965/jrm.2005.p0575
- 5.
Suzuki, K., Mito, G., Kawamoto, H., Hasegawa, Y., and Sankai, Y., “Intention-Based Walking Support for Paraplegia Patients with Robot Suit HAL,” Advanced Robotics, Vol. 21, No. 12, pp. 1441-1469, 2007.
- 6.
Nakamura, T., Saito, K., and Kosuge, K., “Control of Wearable Walking Support System Based on Human-Model and GRF,” Proc. of Robotics and Automation International Conference, pp. 4394-4399, IEEE, 2005.
- 7.
Horst, R. W., “A Bio-Robotic Leg Orthosis for Rehabilitation and Mobility Enhancement,” Proc. of Engineering in Medicine and Biology Society International Conference, pp. 5030-5033, 2009.
10.1109/IEMBS.2009.5333581
- 8.
Park, Y.-L., Chen, B.-R., Pérez-Arancibia, N. O., Young, D., Stirling, L., et al., “Design and Control of a Bio-Inspired Soft Wearable Robotic Device for Ankle–Foot Rehabilitation,” Bioinspiration & Biomimetics, Vol. 9, No. 1, Paper No. 016007, 2014.
10.1088/1748-3182/9/1/016007
- 9.
Riener, R., Lünenburger, L., and Colombo, G., “Human-Centered Robotics Applied to Gait Training and Assessment,” Journal of Rehabilitation Research & Development, Vol. 43, No. 5, pp. 679-693, 2006.
10.1682/JRRD.2005.02.0046
- 10.
Kim, W., Kim, H., Lim, D., Moon, H., and Han, C., “Design and Kinematic Analysis of the Hanyang Exoskeleton Assistive Robot (HEXAR) for Human Synchronized Motion,” Wearable Robotics: Challenges and Trends, pp. 275-279, 2017.
10.1007/978-3-319-46532-6_45
- 11.
Hollander, K. W., Ilg, R., Sugar, T. G., and Herring, D., “An Efficient Robotic Tendon for Gait Assistance,” Journal of Biomechanical Engineering, Vol. 128, No. 5, pp. 788-791, 2006.
10.1115/1.2264391
- 12.
Kobayashi, H., Aida, T., and Hashimoto, T., “Muscle Suit Development and Factory Application,” International Journal of Automation Technology, Vol. 3, No. 6, pp. 709-715, 2009.
10.20965/ijat.2009.p0709
- 13.
Swift, T. A., Strausser, K. A., Zoss, A. B., and Kazerooni, H., “Control and Experimental Results for Post Stroke Gait Rehabilitation with a Prototype Mobile Medical Exoskeleton,” Proc. of American Society of Mechanical Engineers Dynamic Systems and Control Conference, pp. 405-411, 2010.
10.1115/DSCC2010-4204
- 14.
Zhang, J.-F., Dong, Y.-M., Yang, C.-J., Geng, Y., Chen, Y., et al., “5-Link Model Based Gait Trajectory Adaption Control Strategies of the Gait Rehabilitation Exoskeleton for Post-Stroke Patients,” Mechatronics, Vol. 20, No. 3, pp. 368-376, 2010.
10.1016/j.mechatronics.2010.02.003
- 15.
Plagenhoef, S., Evans, F. G., and Abdelnour, T., “Anatomical Data for Analyzing Human Motion,” Research Quarterly for Exercise and Sport, Vol. 54, No. 2, pp. 169-178, 1983.
10.1080/02701367.1983.10605290