ABSTRACT
This paper introduces an entire development trend of the bio-inspired robots, details of the single locomotive robots, and multimodal robots. Unlike general robots that utilize rigid structures and complex control techniques, creatures have compliant and soft body structures and survive in a simpler way. Inspired by the creatures’ standout performances, bio-inspired robotic research has been started by implementing the single locomotion modes of insects such as crawling, jumping, and climbing. Recently, to expand locomotion domain, multimodal robots are actively being studied by integrating more than two locomotion modes of the insects such as jumping-crawling, jumping-gliding, and flying-climbing. Based on the reviews, we carefully suggest how the bio-inspired robotic research will proceed.
-
KEYWORDS: Crawling, Jumping, Climbing, Multimodal robot, Bio-inspired robot
-
KEYWORDS: 크롤링, 점핑, 클라이밍, 복합거동 로봇, 생체모사 로봇
1. 서론
생물의 이동 방식(Locomotion)은 오랜 기간 외부 환경의 영향을 받으며 적합한 형태(Morphology)와 생리(Physiology)를 가지도록 진화해왔다. 생물의 진화 방식은 주로 효율성과 안정성 확보를 지향하였으며, 이러한 방향은 공학 전반에 걸쳐 영감을 주었다. 로봇 분야에서는 1990년 즈음부터, 극한 환경에서의 이동을 위한 디자인에 생체의 핵심 원리를 적용하기 시작하였고 현재, 생체모사로봇(Bio-Inspired Robot) 또는 생체모방로봇(Biomimetics) 공학으로 이어지고 있다.
일반적인 로봇은 뼈대 역할을 하는 강체를 기반으로 다양한 센서와 모터를 활용한 제어를 통해 원하는 기능을 구현한다. 이런 로봇을 더욱 정교하고 정확하게 기능하도록 만들기 위해서는 고성능의 센서, 모터, 컴퓨터 그리고 제어 기법이 필요하며 이는 로봇의 크기와 무게 그리고 계산의 복잡도를 높이게 된다. 하지만 생물은 이런 로봇에 비해 훨씬 작고 가벼우며 간단한 방식으로 움직이고 효과적으로 생존한다.
생물이 기능을 구현하는 방법의 핵심 중 하나는 기계적 피드백 요소의 활용이다.
1 기계적 피드백은 구조와 환경 사이의 상호작용을 활용해 제어의 복잡도를 낮추는 개념으로 생물은 몸체의 유연함, 비등방성 구조, 그리고 강성의 변화 등을 통해 기계적 피드백을 구현한다. 대표적인 예로 바퀴벌레는 다리의 유연함을 활용해 다양한 지형에서 빠르게 이동할 수 있다.
2 이러한 기계적 피드백의 개념이 적용된 생체 모방 로봇은 전통적인 로봇에 비해 간단한 방법으로 기능을 구현할 수 있다는 장점이 있다.
인간이 접근하기 힘든 환경에서 수색 및 정찰을 위해 로봇을 투입한다. 다수의 로봇을 현장에 투입하는 것은 임무의 성공률을 높일 수 있으며 전통적인 로봇에 비해 복잡한 기능을 내재적으로 구현할 수 있는 생체 모방 로봇은 이런 임무에 매우 적합하다. 수색 및 정찰을 위해 필요한 핵심 기능은 다양한 지형을 극복할 수 있는 능력이며 특히 곤충은 다양한 공간에서 다양한 방법으로 다수가 생존하고 있다. 따라서 곤충을 모방한 로봇을 개발해 인간이 접근하기 어려운 지형을 탐사하고 정찰하는데 적용하려는 연구가 진행되고 있다.
초기에는 곤충들이 지형을 극복하는 방법 하나하나를 개별적으로 모방한 단일거동 로봇 개발이 진행됐다. 거칠고 불규칙한 바닥을 주행하기 위해 곤충들이 달리는 방법을 모방한 크롤링 로봇, 높은 장애물을 넘어가거나 위험으로부터 빠르게 벗어나기 위해 곤충들이 점프하는 것을 모방한 점핑 로봇, 나무나 벽을 타고 올라가기 위한 클라이밍 로봇 등 다양한 고성능의 단일거동 곤충형 생체모방 로봇이 개발됐다. 더 나아가 최근에는 서로 다른 움직임을 융합해 더욱 다양한 지형을 효율적으로 극복하기 위한 점프 크롤링 로봇, 점프 글라이딩 로봇 등 복합거동 로봇이 개발되고 있다.
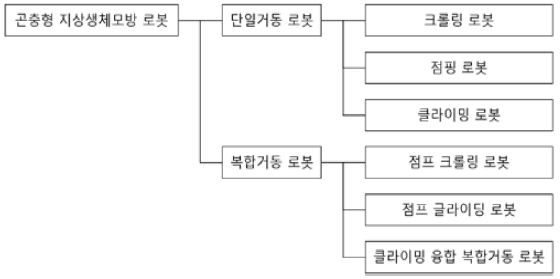
이 논문에서는
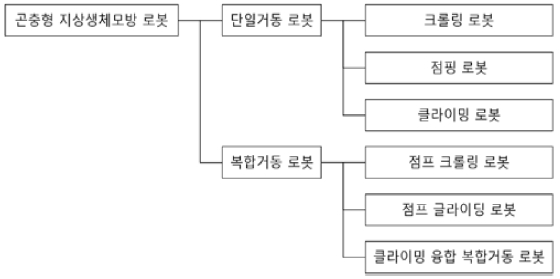
Fig. 1과 같이 곤충형 생체 모방 로봇을 크게 단일거동 로봇과 복합거동 로봇으로 분류하고, 단일거동 로봇에서는 크롤링 로봇, 점핑 로봇, 그리고 클라이밍 로봇으로, 복합거동로봇에서는 점프 크롤링, 점프 글라이딩, 그리고 클라이밍이 융합된 복합거동로봇으로 분류해 소개하고자 한다.
Fig. 1 Classification of the insect-inspired robots
2. Crawling Robot
대부분의 지상 생체는 크롤링을 통해 높은 에너지 효율로 지상을 이동한다. 크롤링은 다리 관절의 존재 여부에 따라 다리 관절을 이용한 크롤링과 다리 관절을 이용하지 않는 크롤링으로 구분된다.
다리 관절을 이용한 크롤링을 구현한 로봇은 대개 바퀴벌레를 모방한다. 바퀴벌레는 수평 방향으로 뻗은 다리들 중 동시에 지면에 닿은 세 개의 다리가 몸체를 지지하기 때문에 역동적인 주행 상황에서도 안정성을 유지할 수 있다. 또한 이러한 주행 안정성을 기반으로 빠른 속도로 주행이 가능하다. 이러한 장점을 살리기 위해 대표적인 지상 생체모방로봇들이 개발되었으며, 이를 활용하여 다양한 응용연구가 진행되었다. 다리 관절을 이용한 크롤링 로봇은 크게 다리형 로봇(Legged Robot)과 다리-바퀴형 로봇(Leg-Wheel Robot)으로 분류할 수 있다. 다리형 로봇(Legged Robot)은 말 그대로 일반적인 형태의 다리를 이용하여 크롤링하는 로봇이며, 다리-바퀴형 로봇(Leg-Wheel Robot)은 축을 중심으로 다리를 회전시켜 바퀴처럼 이용하는 로봇이다.
다리 관절이 없이 크롤링하는 로봇은 주로 지렁이, 자벌레 등을 모방하여 지면과의 비등방성 마찰을 통해 앞으로 나아간다. 다리 관절을 이용하지 않는 크롤링은 다리를 이용할 때보다 속도가 느리지만 움직임이 간단하다. 이로 인해 작은 크기의 로봇을 제작하는 데 유리하고, 다리 관절을 이용한 크롤링으로 갈 수 없는 좁은 틈을 통과할 수 있다.
3 다리 관절 없이 크롤링 하는 로봇은 크롤링 방법에 따라 두 가지로 분류할 수 있다. 지렁이는 몸의 팽창과 수축을 이용하여 크롤링하고, 자벌레는 몸의 굽힘을 이용하여 크롤링한다. 두 가지 생체의 움직임에 대해서 각각 생체모방로봇 개발이 진행되었다.
다리형 로봇(Legged Robot)은 다리의 관절을 움직여 주행에 필요한 움직임을 만들어낸다. 지면에 연속적으로 접촉해야하는 바퀴와 달리, 불연속적인 접촉을 통해 높은 턱, 좁은 틈, 자갈밭 등 다양한 비정형 환경을 극복할 수 있다.
다리형 로봇(Legged Robot) 중 첫 번째로 소개할 크롤링 로봇은
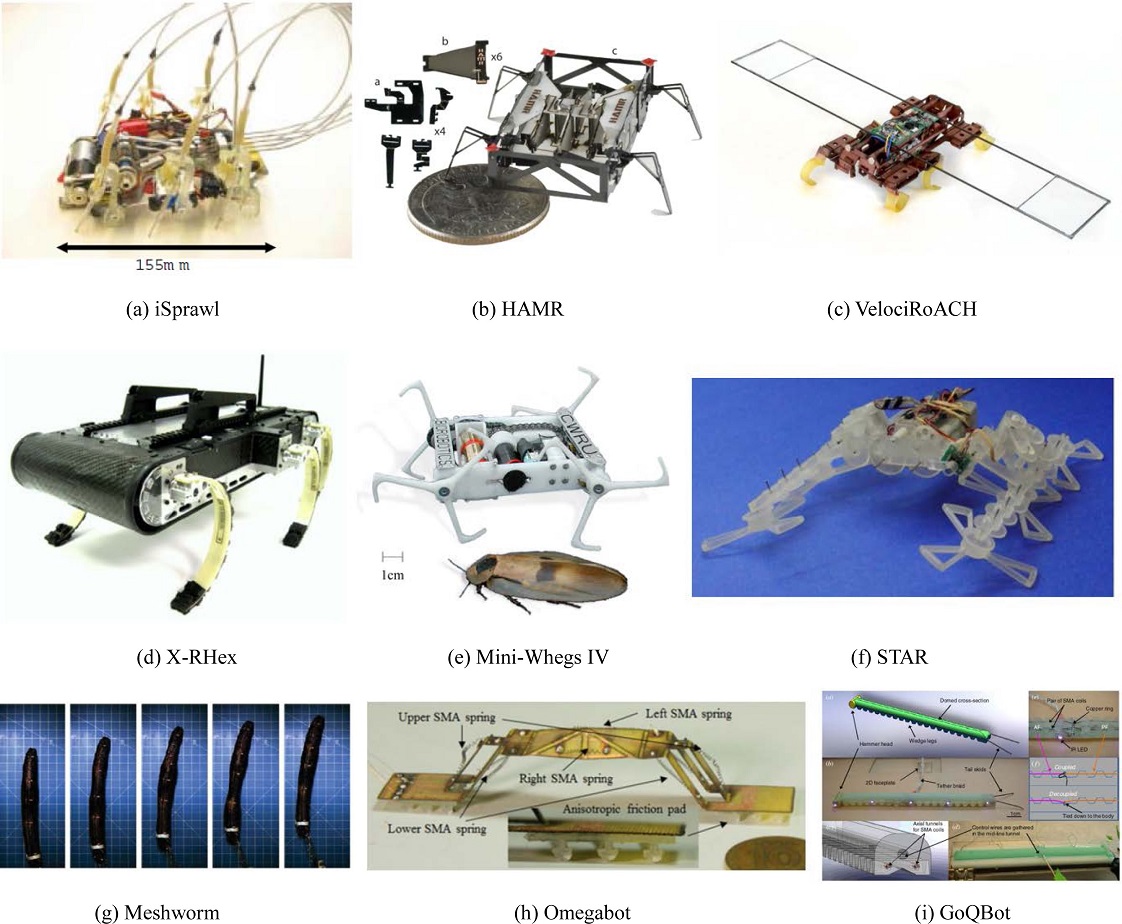
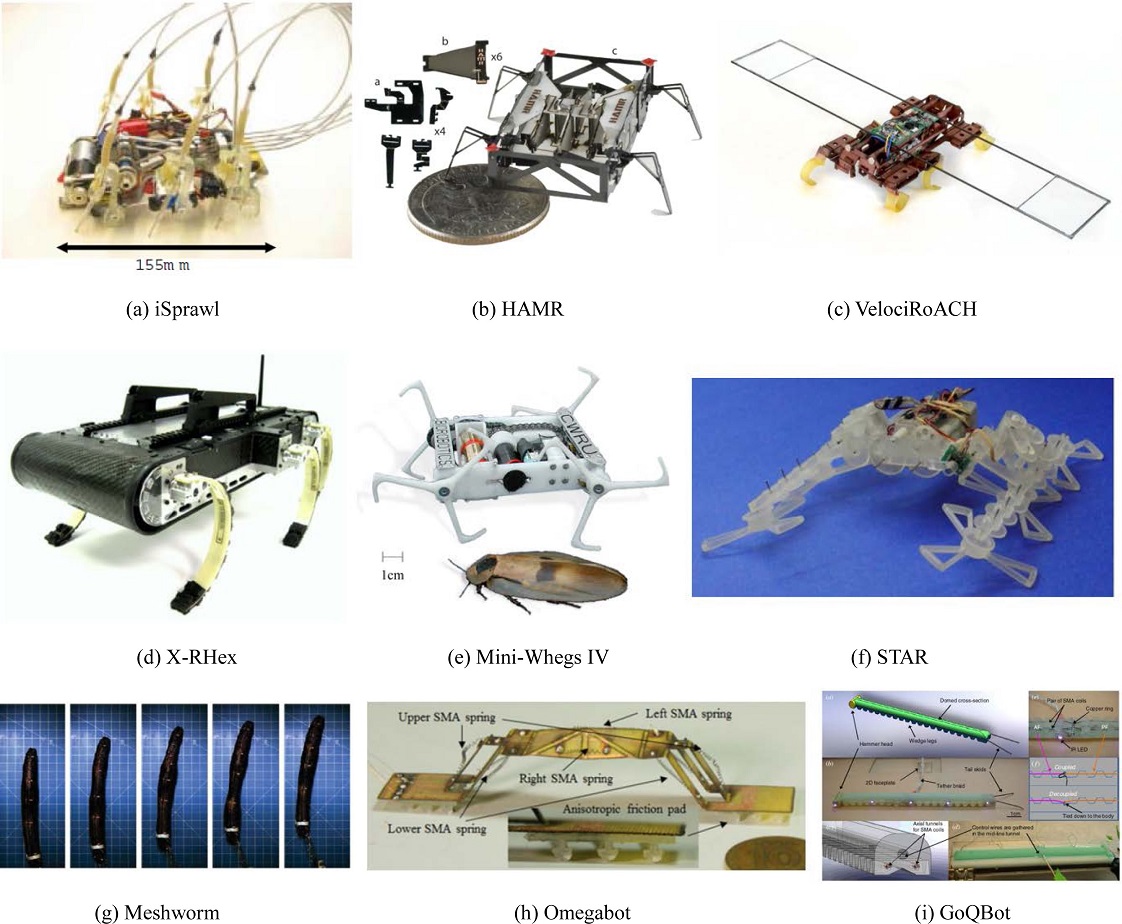
Fig. 2(a)의 Kim
4 등이 개발한 iSprawl이다. 이 로봇은 크랭크-슬라이더 메커니즘을 활용해 여섯 개의 유연한 철사 형태의 다리를 밀고 당긴다. 다리는 지면에 닿은 뒤 휘어지며 지면에 수평방향 힘을 효과적으로 전달하여 빠른 속도로 주행할 수 있다. 이 로봇의 무게는 300 g이며, 최대 속도는 2.3 m/s이다.
Fig. 1Various crawling robots (a-c) Legged robot (d-f) Wheel-leg robot (g-i) Limbless robot
다음으로는
Fig. 2(b)의 Baisch
5-7 등이 개발한 두 개의 압전형 구동기(Piezo-Electric Actuator)를 활용한 주행 로봇 HAMR을 소개한다. 양방향으로 굽힘이 가능한 두 개의 압전형 구동기를 이용하여 5절 구면 링크를 구동하여 주행에 필요한 다리의 위/아래, 좌/우 움직임을 구현하였다. 초창기 버전은 형상기억합금(Shape Memory Alloy)을 이용하여 구동됐으며, 이후 압전형 구동기로 대체되었다. 이를 구동하기 위해서는 높은 전압이 필요하기 때문에 외부 전원장치를 사용해야 한다는 한계를 지니고 있었으나, 최근에는 Goldberg
8 등이 높은 전압을 가할 수 있는 보드를 개발하여 전선이 연결되어있지 않고도 주행이 가능해졌다. 또한 이 로봇을 활용하여 다양한 연구가 진행되었다. Seitz
9 등은 기울어진 지면을 올라갈 수 있는 로봇을 만들기 위해 이 로봇의 발에 게코 도마뱀 모사 미세 돌기를 부착하였으며, 또한 Karpelson
10 등은 자기 결합 공명을 통해 무선으로 전력을 전달할 수 있는 원격 구동(Wireless Actuation) 기술을 개발했다. 나아가 Hoffman
11 등은 HAMR의 구조를 회전 조인트로 이어 붙여 파형 운동(Undulatory Motion)이 가능한 지네 형태의 로봇을 개발하였다. 유연한 허리 관절의 움직임을 이용하면 유효걸음걸이의 길이가 늘어나기 때문에 같은 수의 발걸음을 걸었을 때 더 많은 거리를 이동할 수 있다.
마지막으로 Birkmeyer
12 등이 개발한 DASH 로봇과 이를 Haldane
13 등이 발전시켜 개발한
Fig. 2(c)의 VelociRoACH 로봇은 링크 설계를 통해 다리의 위/아래, 좌/우 움직임을 결합해 하나의 구동기로 모든 다리의 움직임을 구현했다.
이는 현존하는 가장 빠른 곤충형 지상생체모방 로봇으로 최대 4.9 m/s로 주행이 가능하다. 역시 이 로봇을 활용한 다양한 연구가 진행되었는데, Hoover
14 등이 수행한 형상기억합금을 통해 양쪽 다리의 강성을 차등적으로 변형시켜 방향 전환에 필요한 힘과 토크를 발생시키는 연구, Peterson
15 등이 수행한 로봇에 날개를 결합하여 날갯짓으로 인해 발생하는 추력과 양력을 이용하여 주행 속도를 높인 연구, Lee
16 등이 수행한 비등방성 가시를 통해 견인력(Traction Force)를 증가시켜 로봇이 더 많은 무게를 싣고 주행이 가능하도록 한 연구가 있다. 또한 Mongeau
17 등은 로봇이 막다른 절벽을 만났을 때, 뒷다리를 지면에 고정한 채로 몸체의 관성 모멘트를 이용하여 주행 방향을 빠르게 바꿀 수 있는 로봇을 개발했으며, Goldberg
18 등은 접촉 시 힘을 측정할 수 있는 센서를 내장한 껍질을 장착하여 지형을 파악하고 궤적을 계획할 수 있는 로봇, 그리고 Jayaram
19 등은 수직 방향으로 눌렸을 때 유연한 몸체가 좌우로 벌어져 좁은 틈을 효과적으로 주행할 수 있는 로봇 등을 개발했다.
다리-바퀴형 로봇(Leg-Wheel Robot)은 다리를 회전시켜 마치 바퀴와 같은 역할을 하도록 한다. 이러한 주행 방식의 로봇들은 단순히 다리를 회전시키면 되기 때문에 간단한 구조와 구동방식을 가지고 있으나, 구동을 위해 큰 모터 토크가 필요하다.
대표적인 다리-바퀴형 로봇(Leg-Wheel Robot)으로는 Saranli
20 등이 개발한 RHex와 이를 Galloway
21 등이 발전시킨
Fig. 2(d)의 X-RHex 가 있으며, C 형상의 로봇 다리를 시상면(Sagittal Plane)에 수직한 축을 중심으로 회전시킨다. 더 나아가 Spagna
22 등은이 로봇의 다리에 돌출된 가시 구조를 추가하여, 거미와 같이 격자 무늬의 그물 위에서도 주행이 가능하도록 로봇을 개발했다.
앞의 로봇보다 좀 더 작은 크기의 Mini-Whegs IV 로봇이 Morrey
23 등에 의해
Fig. 2(e)와 같이 개발되었으며, 이 로봇은 바퀴살 형상의 다리를 회전시켜 주행한다. 나아가 Lewinger
24 등은 바퀴벌레가 장애물을 마주했을 때 더듬이를 통해 장애물의 높이를 판단하여 이동 경로를 정하는 것을 모방해 이 로봇에 더듬이 구조를 추가하여 접촉 센서로 활용하는 연구를 진행했다.
Zarrouk
25 등이 개발한
Fig. 2(f)의 STAR 로봇은 앞의 두 로봇과는 달리 횡단면(Transverse Plane)에 수직한 회전축을 지니는 다리를 회전시켜 각 바퀴에 작용하는 마찰력의 합력을 이용하여 원하는 방향으로 주행한다. 또한, 양다리가 벌어진 각도를 변화시켜 다양한 높이의 장애물을 통과할 수 있다.
무족형 로봇(Limbless Robot)은 몸체의 일부를 지면에서 끌고 이동해야 하기 때문에 끌려가는 부분에서 이동을 방해하는 방향으로 작용하는 마찰력보다 끄는 부분에서 이동 방향으로 작용하는 마찰력이 커야 한다. 마찰력을 조절하기 위해서는 수직항력 혹은 마찰계수를 조절해야 하는데 특히 몸의 수축과 팽창을 이용하는 무족형 로봇(Limbless Robot)은, 주로 몸의 수직 항력 분포를 조절해 진행 방향으로의 마찰력을 증가시킨다. 반면 몸의 굽힘을 이용하는 무족형 로봇(Limbless Robot)은 방향에 따라 마찰계수가 다른 구조를 바닥에 부착해 진행 방향으로의 마찰력을 증가시킨다.
무족형 로봇(Limbless Robot) 중 몸의 수축과 팽창을 이용하여 크롤링하는 대표적인 로봇으로 Seok
3 등이 개발한
Fig. 2(g)의 Meshworm이 있다. Meshworm은 NiTi-SMA 가닥을 격자 모양으로 엮어서 원통 그물망 형태로 만든 로봇이다. 길이 방향으로 셀이 나뉘어 있어, 한 셀에 전류를 가하면 해당 부분의 SMA가 수축해 해당 셀은 반지름이 감소하며 바닥으로부터 뜨게 된다. 이로 인해 로봇에 작용하는 수직 항력 분포가 변하는 것을 이용해 앞으로 이동한다. 이 로봇은 유연한 재료로만 구성돼있어 큰 충격에도 파손되지 않는다. 이 로봇은 5 mm/s 로 이동할 수 있다.
몸의 굽힘을 이용하여 크롤링하는 무족형 로봇(Limbless Robot)은 대표적으로 Koh
26 등이 개발한
Fig. 2(h)의 Omegabot이 있다. Omegabot은 SCM (Smart Composite Microstructures) 방식으로 제작된 종이접기 기반 로봇으로 관절의 마찰이 작고 무게가 가벼워 에너지 효율적으로 이동할 수 있다. 이 로봇의 발끝에는 비등방성 마찰계수를 가진 탄성체가 부착돼 있어, 하나의 SMA를 사용해 반복적으로 몸을 접었다 펴는 것이 한쪽 방향으로 더 큰 마찰력을 발생시켜 로봇이 앞으로 나아갈 수 있게 한다. 이 로봇의 무게는 1.2 g, 길이는 15 cm, 그리고 속도는 9 mm/s이다.
Lee
27 등은 두 개의 압전형 구동기를 병렬 연결하여 방향 전환이 가능한 Centimeter-Scale Inchworm Robot을 개발했다. 이 로봇의 무게는 1.4 g, 길이는 1.8 cm, 그리고 3 mm/s로 주행할 수 있다. 더 나아가 영구자석과 비등방성 마찰 패드를 사용해 벽을 오를 수 있는 로봇도 개발했다.
무족형 로봇(Limbless Robot)은 지면에 몸이 닿은 채로 움직이기 때문에 에너지효율이 좋지 않고 속도가 느린데, 콩잎말이명나방(Pleuroptya Ruralis, Mother of Pearl Moth)의 애벌레는 필요에 따라 몸을 바퀴 형태로 만들어 효율적이고 빠르게 굴러갈 수 있다. Lin
28 등은 이러한 점에 착안하여
Fig. 2(i)와 같이 크롤링과 롤링이 가능한 GoQBot을 개발했다. 이 로봇에는 길이 방향으로 두 개의 SMA가 직렬로 연결돼있다. 평소에는 두 SMA가 하나의 스프링으로 작용하고, 이때 몸 전체가 비교적 작은 곡률로 구부러지며 크롤링한다. 두 SMA 연결부에 위치한 분할 트리거(Dividing Trigger)를 작동하면 직렬로 연결된 두 SMA를 개별적으로 사용할 수 있고, 이때 앞쪽의 SMA만 작동하면 앞부분의 몸체만 큰 곡률로 구부러져 로봇이 앞 구르기 하듯이 빠른 속도로 굴러가게 된다. 이 로봇의 길이는 10 cm이며 20 cm/s로 주행할 수 있다.
3. Jumping Robot
많은 곤충들은 점핑을 통해 위험에서 빠르게 벗어나거나 높은 장애물을 넘는다. 중력을 거스르고 몸을 높은 위치까지 띄우기 위해서는 큰 에너지가 필요하고 곤충의 근육이 순간적으로 방출할 수 있는 에너지 만으로는 한계가 있다. 따라서 곤충은 근육이 내는 힘을 직접적으로 이용해 점프하지 않고 근육을 이용해 탄성이 있는 구조에 에너지를 저장한 뒤 저장된 에너지를 순식간에 방출시키는 방식으로 점프한다. 소형 탐사 로봇도 구동기의 크기와 무게에 한계가 있어 점핑을 하기 위해서는 곤충과 유사한 방식으로 추가 구조에 에너지를 저장하고 빠르게 방출시킬 수 있는 메커니즘이 필요하다. 그러한 메커니즘으로는 이스케이프먼트 캠(Escapement Cam), 일부 이가 없는 기어(Toothless Gear), 편도베어링(One Way Bearing)등을 활용한 방법들이 있으며 이런 메커니즘을 기반으로 다양한 점핑 로봇들이 개발됐다.
이스케이프먼트 캠 메커니즘은 반지름이 달라지는 캠과 캠을 회전시키는 모터 그리고 에너지 저장 요소인 용수철로 이루어져 있다. 모터가 캠을 회전시키면 캠의 반지름 변화에 의해 용수철이 변형되어 에너지가 저장된다. 캠의 회전 사이클 마지막 부분에서 캠의 반지름이 초기 상태가 되면 용수철에 저장되었던 에너지가 방출되면서 점프한다. Kovac
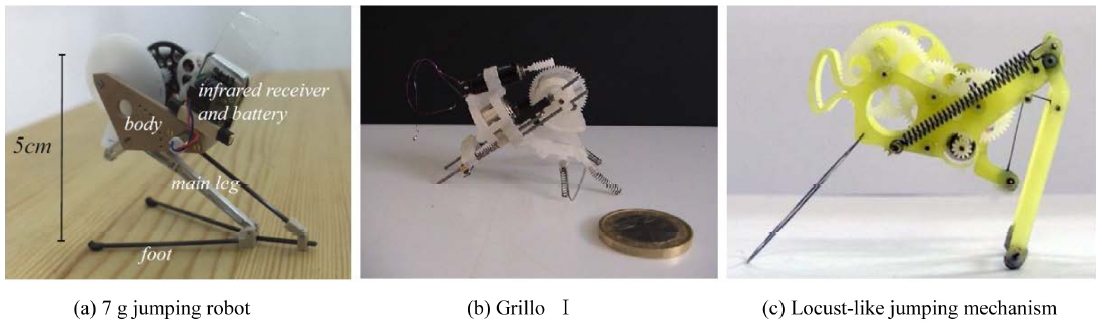
29 등이 개발한 7 g Jumping Robot, Scarfogliero
30 등이 개발한 Grillo I, 그리고 Nguyen
31 등이 개발한 메뚜기 모사 점핑 메커니즘이 이스케이프먼트 캠 메커니즘을 이용한다.
Kovac
29 등이 개발한 7 g Jumping Robot의 구조는
Fig. 3(a)와 같으며, 총 질량이 7 g으로 1.4 m 도약 가능하며, 이 도약 높이는 27 Body Length (BL)에 해당한다. 그리고 Kovac
32 등은 7 g Jumping Robot에 무게 중심 위치를 이용한 수동적인 자세 교정 메커니즘과 모터를 이용한 방향 전환 메커니즘을 추가하여 방향 전환과 연속 점프가 가능한 점핑 로봇을 개발하였다.
Fig. 3 Various jumping robots using escapement cam mechanism
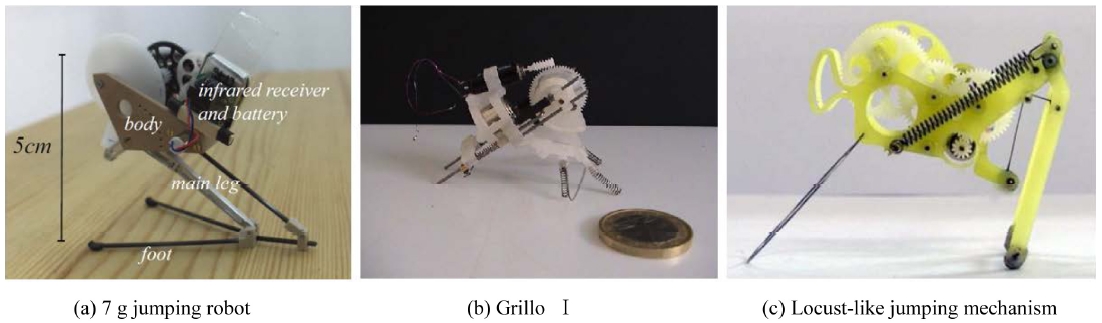
Scarfogliero
30 등이 개발한 Grillo I은
Fig. 3(b)와 같이 모터를 이용하여 뒷다리에 연결된 용수철에 에너지를 저장하고 이스케이프먼트 캠 메커니즘으로 저장되었던 에너지를 방출한다. 이 로봇은 15 g이고 도약할 때 초기 속력은 1.5 m/s이다.
Nguyen
31 등이 개발한 점핑 메커니즘은 메뚜기의 다리 구조를 모사해 대퇴골(Femur)과 경골(Tibia)로 이루어져 있으며, 두 뼈대는 신근(Extensor) 역할을 하는 용수철로 연결돼있다. 캠이 회전하면 경골에 연결된 굴근(Flexor) 역할을 하는 와이어가 당겨지며 다리가 접히고 용수철이 인장 돼 에너지가 저장된다. 캠이 한 바퀴를 다 돌면 당겨지던 와이어가 빠르게 풀리고 접혀 있던 로봇의 다리가 용수철에 의해 빠르게 펴지며 점프한다. 이 로봇의 질량은 7 g으로 71 cm의 높이(14 BL)와 100 cm(20 BL)의 거리를 점프할 수 있다.
일부 이가 없는 기어를 사용하는 메커니즘은 모터와 연결되는 기어와 일부의 이가 없는 기어로 구성된다. 이가 있는 부분에서는 두 기어가 맞물려서 돌아가는데 이가 없는 부분을 만나면 두 기어의 연결이 풀려 한쪽 기어가 자유롭게 돌 수 있다. 모터와 연결된 기어를 회전시킬 때 두 기어가 맞물리는 동안에는 일부의 이가 없는 기어에 연결된 용수철이 변형되어 에너지를 저장하다가 이가 없는 부분에서 용수철의 복원력에 의해 저장되었던 에너지가 방출된다.
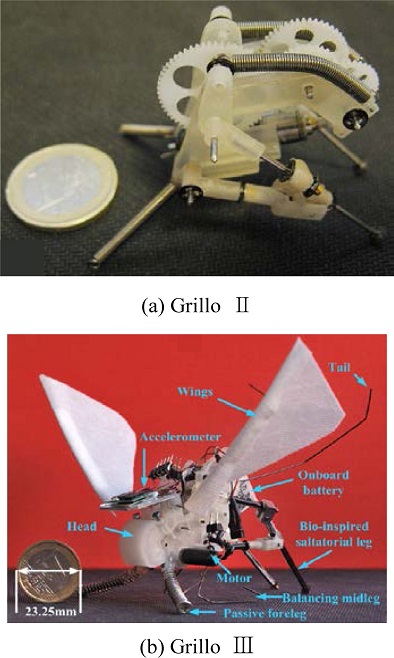
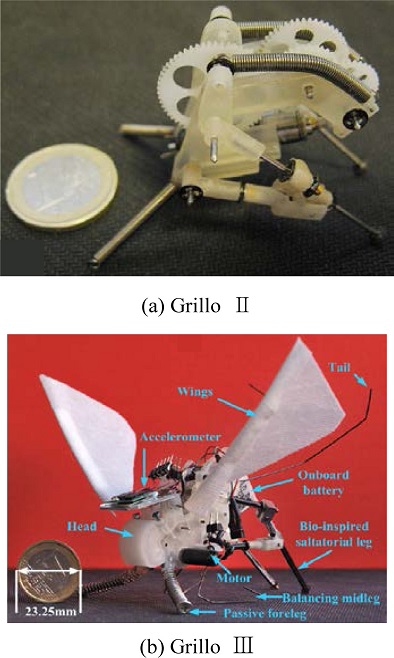
Li
33, 34 등이 개발한 Grillo II (
Fig. 4(a))와 Grillo III (
Fig. 4(b))는 일부 이가 없는 기어를 사용한다. 이 로봇은 다리를 구성하는 링크들의 길이 관계 최적화를 통해 실제 곤충이 도약 중 지면에 일정한 힘을 지속적으로 가해 미성숙 도약과 로봇의 미끄러짐을 방지하고 효율적으로 도약하는 것처럼 지면에 일정한 힘을 가하며 도약할 수 있다. 또한 Grillo III는 날개를 활용해 공중에서 로봇의 자세 안정성을 개선했다. Grillo II의 무게는 10 g이고 3.6 m/s의 초기 속력으로 도약한다. Grillo III의 무게는 22 g이고 높이 10 cm와 거리 20 cm를 점프할 수 있다.
Fig. 4 Jumping robots using toothless gear mechanism
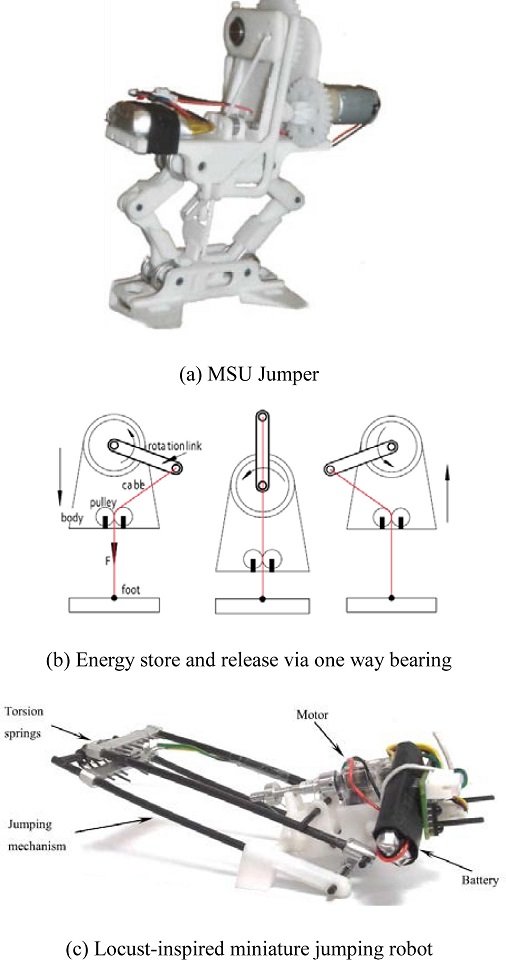
Zhao
35 등이 개발한 MSU Jumper는
Fig. 5(a)와 같으며, 편도베어링을 이용하여 에너지를 저장하고 방출한다. 편도베어링은 한쪽방향회전으로만 동력 전달이 가능하기 때문에 동력이 전달되는 방향을 활용해 에너지를 저장한다. 그 때 탄성체의 복원력은 편도베어링이 회전하지 못하는 방향으로 작용한다. 에너지를 저장하며 링크는
Fig. 5(b)와 같이 반 시계 방향으로 회전을 하고 점차 수직방향 최고점에 도달하는데 그 순간 복원력의 방향이 편도베어링이 회전하는 방향으로 바뀌어 에너지가 방출된다. MSU Jumper는 하나의 모터로 에너지 저장과 방출뿐만 아니라 자세 교정과 방향 전환이 가능하다 자세 교정은 에너지를 저장할 때 자세 교정 링키지가 지면을 밀어내는 방향으로 튀어나와 이루어진다. 방향 전환은 편도베어링에 의해 에너지 저장과 반대 방향으로 모터를 회전시키면 회전 링크는 회전하지 않으면서 지면과 닿는 기어만 회전시켜 방향 전환을 수행한다. MSU Jumper는 23.5 g으로 75도의 도약 각도로 87 cm를 뛸 수 있다. 더 나아가 Zhao
36 등이 개발한 MSU Tailbot은 도마뱀이 꼬리를 이용해 공중에서 자세를 바꿔 안전하게 착지할 수 있는 점에 영감을 받아 MSU Jumper에 하나의 모터와 꼬리를 추가하여 공중에서의 자세 제어를 수행한다.
Fig. 5 Various jumping robots (a, b) MSU Jumper, (c) Locust-inspired jumping robot
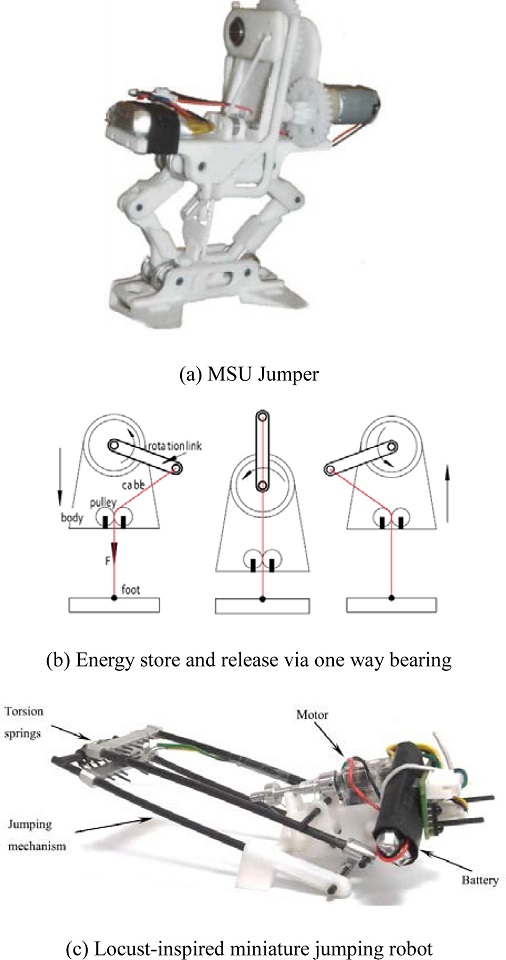
Zaitsev
37 등이 개발한 메뚜기 모사 점핑 로봇의 구조는
Fig. 5(c)에서 볼 수 있으며, 메뚜기의 뒷다리를 모사하여 대퇴골과 경골에 해당하는 두 개의 링크로 이루어져 있고, 이 두 개의 링크는 에너지 저장에 사용되는 비틀림 용수철로 연결되어 있다. 모터를 회전시켜 발끝에 연결된 실을 감으면 다리가 접히면서 비틀림 용수철에 에너지가 저장되고, 다리가 끝까지 접히면 발끝이 로봇 몸통에 있는 걸쇠에 걸리면서 다리가 접힌 채로 유지된다.
모터를 반대 방향으로 회전시켜 걸쇠와 발을 분리하면 다리가 펴지며 에너지가 방출된다. 로봇의 무게는 23 g이며 3.35 m의 높이와 1.37 m의 거리를 점프할 수 있다.
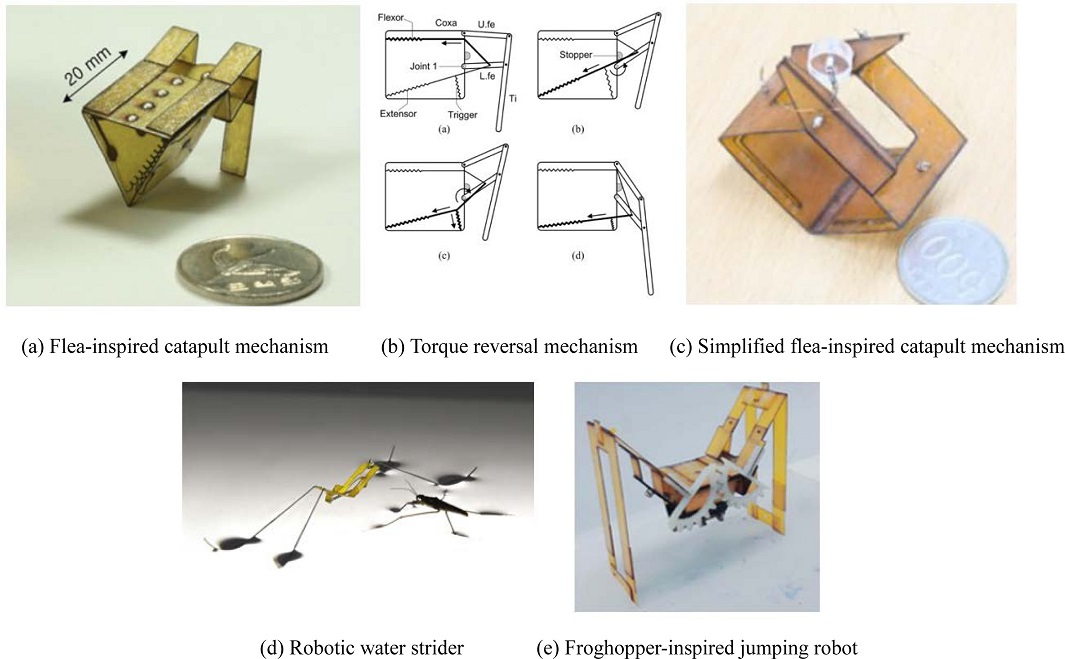
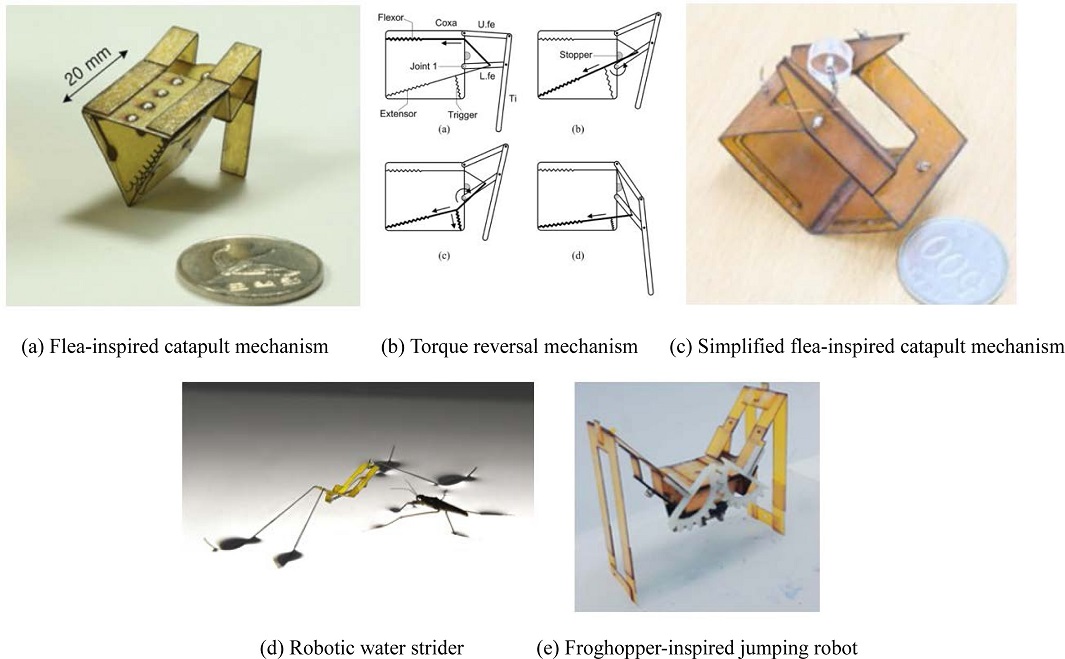
Noh
38 등은 벼룩의 토크 역전 메커니즘을 형상기억합금을 이용해 구현했다(
Fig. 6(a)). 벼룩 모사 점핑 메커니즘은
Fig. 6(b)에서 볼 수 있듯이 굴근(Flexor), 신근(Extensor), 트리거(Trigger) 역할을 하는 세 개의 형상기억합금 스프링으로 이루어져 있다. 점핑을 위해 먼저 굴근을 수축해 다리를 접는다. 그 후 신근을 수축시키는데, 이때 신근이 만드는 토크의 방향이 다리를 접는 방향이므로 다리가 접힌 상태로 유지되면서 에너지가 저장된다. 이때 신근에 연결된 트리거를 수축시키면 신근이 회전 중심을 지나고 신근이 만드는 토크의 방향이 역전되어 다리가 펴지며 저장된 에너지가 방출돼 점프한다. 이 로봇의 무게는 1.1 g, 길이는 2 cm이며 64 cm(30 BL)를 점프할 수 있다. 이 외에도 벼룩 모사 점핑 메커니즘을 활용한 다양한 점핑 로봇이 개발됐는데 Koh
39 등이 개발한 단순화된 벼룩 모사 점핑 메커니즘은
Fig. 5(c)에서 볼 수 있듯이 4절 링크와 신근과 트리거 역할을 하는 두 개의 형상기억합금 스프링으로 토크 역전 메커니즘을 구현했다. Koh
40 등이 개발한 소금쟁이 모사 로봇은
Fig. 6(d)와 같이 트리거 대신 유연한 L형 보 구조를 가지고 있는데 이 구조는 신근이 구동되면서 굽혀지고 신근이 회전 중심을 지나게 해 토크 역전을 구현하고 에너지를 방출하므로 신근역할을 하는 하나의 형상기억합금 스프링 만을 포함한다. 더 나아가 소형 점핑 로봇의 기동성을 증가시키기 위해
Fig. 6(e)와 같은 거품벌레를 모사한 방향 전환 메커니즘이 개발되었다. 거품벌레는 좌우 대칭으로 배치된 한 쌍의 뒷다리와 두 다리의 동기화된 점프를 위한 한 쌍의 기어로 이루어져 있어 불필요한 회전을 최소화하며 방향 전환이 가능하다.
41 Jung
42 등이 개발한 거품벌레 모사 로봇은 거품벌레 구조를 모사하여 한 쌍의 다리와 한 쌍의 기어로 구성되어 있다. 기어를 통해 두 개의 다리가 동시에 점프하도록 하여 모멘트 상쇄를 통해 회전을 최소화하며, 각 다리가 지면과 이루는 각도를 변화시켜 지면 반작용력의 방향을 바꿔 점프 방향을 바꿀 수 있다.
Fig. 6 Jumping robots using flea-inspired catapult mechanism
4. 클라이밍 로봇
클라이밍을 통해 소형 탐사 로봇은 큰 장애물을 올라가고 원하는 높이에 고정돼 에너지 효율적으로 감시, 정찰을 수행할 수 있다. 클라이밍을 하기 위해서는 중력을 버틸 수 있는 마찰력을 발생시키기 위한 수직항력이 필요하다. 연구 초기에는 쉽게 큰 수직 항력을 만들 수 있는 공압과 자석을 이용하여 클라이밍을 수행하였다. 하지만 공압의 경우 단면이 매끄러워야 하고 구동기의 무게가 많이 나가며, 자석의 경우 철 재질의 단면에서만 수직항력을 만들 수 있다는 한계가 있다. 최근에는 이를 극복하여 다양한 접촉면에서 클라이밍 하기 위해 접착, 미세 가시돌기 등 곤충의 특성을 모방한 클라이밍 로봇이 연구되고 있다.
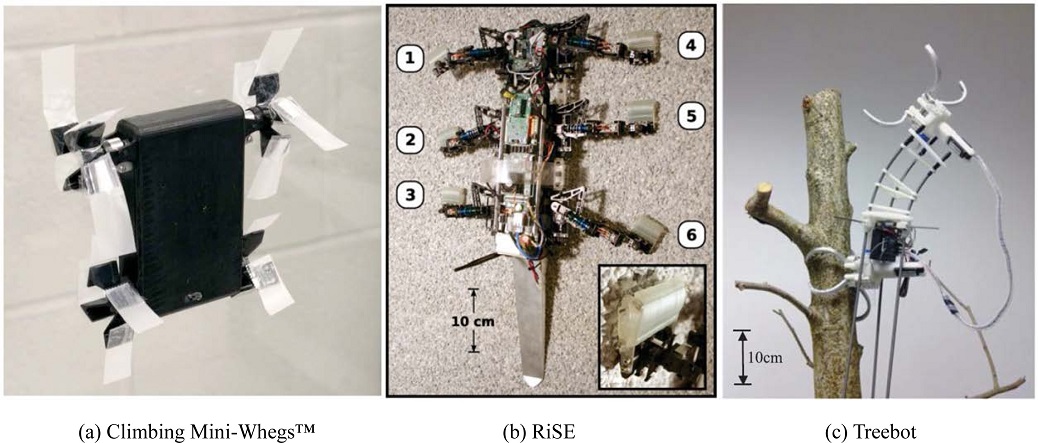
클라이밍 로봇 중 첫 번째로 소개할 로봇은 Daltorio
43 등이 개발한
Fig. 7(a)의 Climbing Mini-Whegs
TM이다. 이 로봇은 테이프의 접착력을 이용하여 수직항력을 얻는다. 공압처럼 큰 무게의 구동기가 필요하지 않기 때문에 이전 로봇에 비해 무게가 가벼워졌고 자석보다 다양한 단면을 클라이밍할 수 있다.
Fig. 7 Various climbing robots
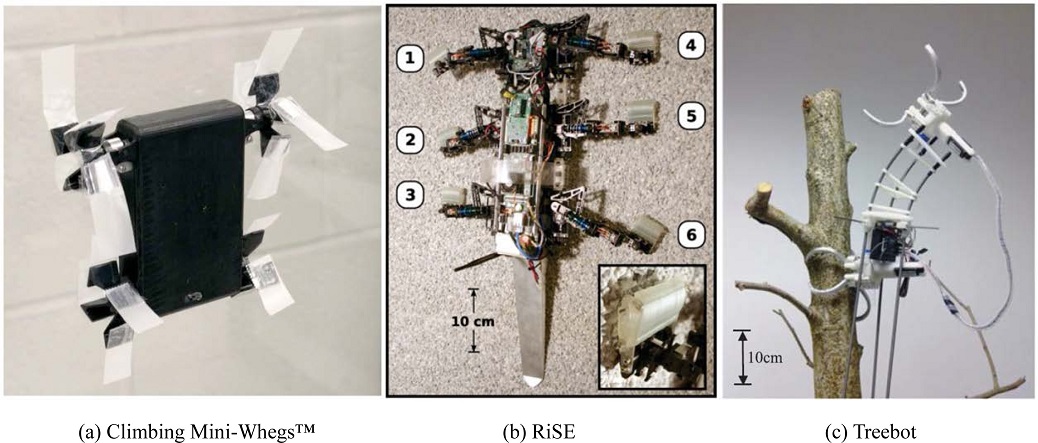
Spenko
44 등은
Fig. 7(b)와 같이 가시돌기를 활용한 육족(Hexapedal) 클라이밍 로봇RiSE를 개발했다. Mini-Whegs
TM를 포함한 기존의 클라이밍 로봇이 공압, 접착 등을 이용하여 매끄러운 단면에서 클라이밍 했다면, RiSE는 가시돌기를 이용하여 거친 단면에서 클라이밍 할 수 있는 로봇이다. 다리형 로봇(Legged Robot) 발에 가시돌기를 부착하여 돌기가 접촉면에 박히면서 수직항력을 얻는다. 다리 길이를 조절할 수 있어서, 짧은 다리의 높은 강성을 이용하여 수평면에서 빠른 속도로 크롤링 할 수 있고, 긴 다리의 낮은 강성을 이용하여 수직면에서 높은 환경 적응력으로 클라이밍 할 수 있다. 다리 끝에 부착된 유연한 발톱은 단단한 우레탄과 부드러운 우레탄을 같이 사용하여 수직항력을 충분히 제공하면서도 다양한 표면을 클라이밍할 수 있도록 하였다.
마지막으로 소개할 로봇은 Lam
45 등이 개발한
Fig. 7(c)의 Treebot이다. 이 로봇은 RiSE와 마찬가지로 나무와 같이 불규칙적이고 거친 구조에서 클라이밍 하는 것에 초점을 맞추었다. 앞서 소개한 클라이밍 로봇과는 달리 이 로봇은 다리가 없다. 위 절에서 언급하였듯이 무족형 로봇(Limbless Robot)은 다리형 로봇(Legged Robot)에 비해 속도가 느리지만 안정적이고 높은 환경 적응력을 가진다. 이 로봇도 마찬가지로 로봇 앞뒤에 6 구부착 되어 있는 그리퍼를 이용하여 안정적으로 나무를 잡아서 올라간다. 그리퍼의 크기를 조정하여 다양한 곡률의 원기둥, 불규칙 구조를 잡을 수 있다. 세 개의 탄성 스프링으로 연결 된 몸체는 방향 전환을 유연하게 수행하고 환경 적응력이 높게 나무에 부착된다.
5. 복합거동 로봇
현재까지 곤충을 모방해 크롤링, 점핑, 그리고 클라이밍 등 하나의 극대화된 성능의 움직임이 가능한 로봇이 많이 개발됐다. 로봇이 실제 임무를 수행하기 위해서는 한 종류의 장애물을 극복하는 것이 아니라 다양한 서로 다른 장애물들을 연속적으로 극복할 수 있어야 하고 이를 위해서는 하나의 로봇이 다양한 기능을 수행할 수 있어야한다. 하지만 앞서 소개한 단일 거동 로봇들은 하나의 기능만을 수행할 수 있어 실제 임무에 투입되기에는 어려움이 있다. 실제 곤충들은 다양한 움직임이 가능하고 마주치는 환경에 따라 적합한 움직임을 선택해 효과적으로 이동한다. 예를 들어 메뚜기는 안전한 곳에서는 기어 다니며 에너지 소모를 최소화하지만 위험한 순간이나 먼 거리를 이동해야 할 경우 점핑 혹은 비행을 통해 빠르게 움직인다. 이렇게 다양한 움직임이 가능한 곤충처럼 소형 로봇도 다양한 움직임이 가능하도록 서로 다른 움직임을 가진 로봇 혹은 메커니즘을 융합하려는 연구가 진행되고 있고 그러한 로봇을 복합거동 로봇이라 한다.
복합거동 로봇은 크게 두 가지 장점이 있는데 첫째는 서로 다른 움직임의 융합으로 로봇의 이동성이 증가한다는 점이다. 예를 들어 점핑과 크롤링을 융합할 경우 크롤링 속도와 점핑 높이의 조합에 따라 로봇은 다양한 이동 궤적 중 하나를 선택해 움직일수 있게 된다. 복합거동의 두 번째 장점은 환경에 따라 효율적으로 움직일 수 있다는 것이다. 비행은 모든 방향으로 이동할 수 있어 지형을 극복하는 능력이 뛰어난 움직임이지만 다른 이동 방식에 비해 에너지 소모가 매우 커서 한정된 에너지를 가진 소형 탐사 로봇이 오랜 시간 수행하기에는 어려움이 있다. 하지만 크롤링과 융합하면 필요한 순간에만 비행을 하고 평소에는 지상에서 크롤링을 통해 에너지 효율적으로 이동할 수 있다. 이처럼 서로 다른 움직임을 융합하고 두 움직임이 서로를 보완하고 개선할 수 있도록 복합거동 로봇을 개발하는 연구가 많이 시도되고 있다. 다음으로 이러한 복합거동 로봇을 점프-크롤링, 점프-글라이딩, 그리고 클라이밍이 융합된 복합거동 로봇으로 나누어 소개한다.
5.1 점프-크롤링 로봇(Jump-Crawling Robot)
점핑은 큰 에너지를 순간적으로 방출하며 빠른 속도로 로봇을 공중으로 띄운다. 이를 통해 로봇의 크기에 비해 매우 큰 장애물을 효과적으로 넘어갈 수 있다. 하지만 장애물에 따라 점핑 각도와 방향을 조절하기 위해서는 점핑 메커니즘 외에 추가적인 메커니즘이 필요하다. 이는 무게의 증가로 점핑 성능을 감소시킨다.
크롤링은 울퉁불퉁한 지면을 빠르게 지나갈 수 있으며 에너지 소모가 매우 적은 이동방식이다. 하지만 다리 혹은 다리형 바퀴를 사용하기 때문에 높은 장애물을 지나가는 데에는 한계가 있다.
이러한 한계로 인해 점핑과 크롤링을 개별적으로 실제 환경에 적용하는 것은 어려움이 있다. 따라서 이러한 한계를 극복하고자 점핑과 크롤링을 융합하는 연구가 진행되고 있다. 점핑과 크롤링의 융합은 단순히 점핑 로봇이 크롤링도 할 수 있거나 크롤링 로봇이 점핑도 할 수 있는 것을 넘어서 두 움직임의 융합으로 서로의 한계를 보완해준다는 장점이 있다.
점핑 로봇이 이동성을 확장하기 위해 필요로 하는 방향 전환 및 각도 조절 기능은 크롤링과의 융합을 통해 간단히 구현될 수 있다. 점핑 각도는 로봇의 수직 방향 속력과 수평 방향 속력의 조합으로 결정이 된다. 따라서 점핑 높이와 크롤링 속도를 각각 조절하면 점프-크롤러 의 도약 각도를 조절할 수 있다. 그리고 점핑 방향도 크롤링 방향 조절을 통해 제어할 수 있다. 또한 평지에서는 크롤링 을 하고 높은 장애물 앞에서는 점핑을 해 각각의 단일 거동 로봇에 비해 빠르고 효율적으로 이동할 수 있다.
Jung
46 등은 4절 링크와 롤링 컨택트 조인트(Rolling Contact Joint)를 활용한 고성능의 점핑 메커니즘과 버클리에서 개발한 크롤링 로봇 VelociRoACH를 융합하여
Fig. 8(a)와 같이 JumpRoACH를 개발했다. 점핑 메커니즘에는 하나의 모터로 에너지 저장량을 조절하고 원하는 타이밍에 방출이 가능한 독특한 기어박스가 적용돼 도약 높이를 조절할 수 있다. 이 로봇의 무게는 59.4 g, 도약 높이는 1.10 m부터 1.62 m까지 조절할 수 있고 주행속도는 0 m/s부터 0.62 m/s까지 조절할 수 있다. 도약 높이와 주행 속도 조절을 통해 이 로봇은 다양한 궤적으로 도약할 수 있고 장애물에 따라 주행 혹은 도약을 해 효율적으로 이동할 수 있다.
Fig. 8Various multimodal robots (a-c) jump-crawler, (d-f) jump-glider, (g, h) multimodal robots with climbing ability

Lambrecht
47 등은 생체모방 크롤링 로봇 Mini-Whegs7에 점핑 메커니즘을 융합해
Fig. 8(b)의 Mini-Whegs9j를 개발했다. 로봇으로 무게는 191.4 g, 최대 도약 높이는 18 cm, 최대 주행 속도는 3 BL/s(약 30 cm/s)이다.
복합거동 로봇을 개발할 때에는 두 로봇 혹은 메커니즘을 융합하게 되는데 이 과정에서 로봇 전체의 질량이 증가해 각 기능의 성능이 감소하게 된다. 따라서 성능 감소를 최소화하는 것이 복합거동 로봇 개발의 중요한 점 중 하나이다. Zhang
48 등은 로봇의 무게 증가를 최소화하기 위해
Fig. 8(c)와 같이 크롤링과 점핑이 하나의 모터로 구동되는 점프-크롤링 로봇을 개발했다. 모터에 연결된 피니언 기어 양쪽에 편도 베어링(One Way Bearing)이 하나씩 연결되며 편도 베어링(One Way Bearing)의 한쪽 방향으로는 힘이 전달되지만 반대 방향으로는 베어링이 헛돌아 힘이 전달되지 않는 특징을 이용해 하나는 크롤링을 구동하고 또 다른 하나는 점핑을 구동한다. 이 로봇의 무게는 52 g이고 주행 속도는 1.43 mm/s, 점핑은 71.2 도의 각도로 33 cm를 뛸 수 있다.
소형 탐사 로봇은 한정된 에너지로 임무를 수행해야 하기 때문에 CoT (Cost of Transport)가 낮을 수록 동일한 에너지 소모로 더 많은 거리를 이동할 수 있어 임무 수행에 유리하다. 다양한 이동 방식 중 특히 글라이딩은 에너지 소모가 매우 작은 이동방식으로 글라이딩을 하는 대표적인 생물인 알바트로스의 경우 글라이딩 중 에너지 소모량은 가만히 있을 때와 거의 유사하다.
49 글라이딩은 위치에너지를 활용해 움직이는 방식으로 더 멀리 이동하기 위해서는 더 높은 위치가 필요하며 이러한 특징은 매번 높은 위치에 도달 후 추락하는 점핑 로봇에 융합되기 매우 적합하다. 점핑과 글라이딩이 융합된 로봇은 점핑 이후 최고점에서 점핑을 통해 얻은 위치에너지를 이용해 글라이딩으로 더 많은 거리를 이동할 수 있을 것으로 기대돼 많은 연구가 진행되고 있다.
Vidyasagar
50 등은 Kovac
29 등이 개발한 7 g Jumging Robot에 날개를 부착한
Fig. 8(d)의 EPFL Jump Glider를 개발했다. 이 로봇의 경우 날개의 면적에 의한 공기 저항과 날개의 무게로 인해 7 g Jumping Robot 단독에 비해 점핑 성능이 크게 감소했다. 하지만 로봇을 2 m 높이의 단 위에서 작동 했을 경우 점핑 로봇 단독에 비해 융합된 로봇이 글라이딩을 통해 두 배 이상 더 먼 거리를 이동할 수 있는 것을 확인했다.
이처럼 글라이딩을 융합할 때에는 날개의 면적으로 인한 공기 저항의 증가로 점핑 성능이 감소하는데 이를 최소화하는 것이 매우 중요하다. 그 방법으로는 날개를 회전시키거나 접는 것이 있는데 Desbiens
51 등은 로봇이 도약하는 중에는 날개가 회전해 공기저항을 최소화하고 하강하는 중에는 날개의 각도가 고정돼 효과적으로 글라이딩 할 수 있는 점프-글라이더를 개발했으며 점프-글라이딩을 점핑, 전이 그리고 글라이딩 세가지 구간으로 나누어 로봇의 성능에 관한 모델을 제시했다.
글라이더 날개의 면적뿐만 아니라 날개의 무게 또한 로봇의 성능을 해치는 요인 중 하나로 Woodward
52 등은 날개와 다리의 구조 공유를 통해 날개 면적과 무게로 인한 점핑 성능 감소 모두를 최소화한
Fig. 8(e)의 MultiMo-Bat을 개발했다. 이 로봇은 4절 링크 형태의 다리 두 개에 에너지를 저장하고 방출해 점프하며 각 다리에는 천이 덮여 있어 점핑 이후 두 다리를 양쪽으로 펼쳐 날개로 사용해 글라이딩 한다. 이 로봇은 3.2 m를 도약하고 수평 방향으로 3.56 m를 이동할 수 있다.
점핑과 글라이딩의 융합은 로봇 CoT의 감소 외에 로봇의 공중 자세 안정성과 착지 안정성에도 큰 도움이 된다. 점핑 로봇 단독의 경우 점핑 후 로봇은 회전하게 되며 매우 빠른 속도로 바닥에 추락한다. 이 때 로봇은 충격에 의해 파손될 위험이 있고 다시 도약하기 위해서는 넘어져 있는 로봇의 자세를 바로잡을 수 있는 메커니즘이 필요하다. 하지만 글라이딩과 융합되면 점핑 후 이어지는 글라이딩으로 로봇은 바른 자세로 천천히 지면에 다가가 착지 이후 다시 작동하기에 유리해진다. Beck
53 등은 접히는 날개를 활용한
Fig. 8(f)의 점프-글라이더를 개발했으며 날개의 펴지는 타이밍과 꼬리날개의 각도를 활용해 점핑 이후 로봇의 회전을 감소시키고 로봇이 착지 이후 다시 점핑 할 수 있는 자세로 착지할 수 있도록 했다. 또한 글라이딩을 통해 착지 시 충격이 감소하는 것을 확인하였다.
소형 탐사 로봇에서는 정보 수집 또한 중요한 기능 중 하나인데 로봇이 지면에 있을 경우 시야가 좁아 정보 수집에 불리하고 비행을 할 경우에는 시야는 매우 넓지만 에너지 소모가 매우 커 로봇의 구동 시간이 크게 감소한다. 로봇이 높은 벽 혹은 나무에 붙어 있을 경우 비행에 비해 에너지 소모는 작지만, 지면에 비해 시야는 넓어 보다 효율적으로 정보 수집이 가능해질 것으로 기대해 클라이밍이 융합된 복합거동 로봇이 개발되고 있다.
Yanagida
54 등은
Fig. 8(g)와 같이 거미를 모방한 로봇을 개발했다. 이 로봇은 네 개의 반원형 다리를 활용해 지면에서 기어 다닐 수 있고 몸통과 다리 사이의 각도를 조절해 전체 형상을 원형으로 만들어 필요에 따라 빠르게 굴러갈 수 있다. 또한, 로봇의 몸통에는 마이크로 석션 컵(Micro Suction Cup) 구조가 있어 진공을 활용해 벽을 올라갈 수 있다.
Pope
55 등은
Fig. 8(h)와 같이 드론에 클라이밍 메커니즘을 추가해 비행이 가능하고 필요에 따라 벽에 부착되고 벽을 오르내릴 수 있는 로봇 SCAMP를 개발했다. 클라이밍 메커니즘은 미세 가시(Micro Pin)를 활용했고 드론의 추진력으로 클라이밍과 벽에 부착(Perching)을 위한 수직항력을 가해 매우 안정적으로 벽에 부착되고 등반할 수 있다.
6. 결론
생체모방로봇은 인간이 접근하기 힘든 극한 환경 탐색을 위해 시작되었다. 이를 위해 곤충의 이동 방식을 조사하고 이해하여 로봇 디자인에 적용하였다. 본 논문에서는 다양한 곤충형 지상생체모방로봇을 크게 단일 거동과 복합 거동으로 나누어 소개하였다. 또한, 각 거동에서 이동 방식 별로 다시 분류하여 보다 세부적으로 서술하였다.
초기에는 곤충의 단일 거동을 이해하고 구현하는 연구가 많이 진행됐다. 그 결과 고성능의 단일거동 로봇들이 많이 개발되었다. 비교적 최근에는 로봇의 이동성을 높이기 위해, 서로 다른 움직임을 융합하기 시작하였고, 다양한 움직임이 가능한 복합거동 로봇 개발이 많이 진행되고 있다.
그러나, 아직 곤충형 지상생체모방 로봇을 실제로 사용하는 데에는 어려움이 있으며, 실제 활용을 위해서는 몇 가지 과제가 해결되어야 한다. 첫째, 센서가 융합된 형태의 곤충형 로봇이 필요하다. 곤충형 로봇은 정보 수집이 주 목적이나, 현재 정보 수집용 센서가 융합된 곤충형 로봇 개발은 거의 진행되지 않은 상태이다. 둘째, 탐사 임무에 사용되기 위해서는 로봇의 운용 가능 시간이 적어도 수 십분 이상은 확보되어야 한다. 현재 개발된 로봇들은 배터리 용량의 한계로 구동 시간이 10분 이내다. 고성능의 센서와 배터리는 많이 개발 되었지만, 곤충형 로봇에 사용되기 위해서는 더욱 경량화가 필요하고 배터리의 경우 경량 에너지 하베스팅 등을 이용하여 배터리 의존도를 떨어뜨릴 필요가 있다. 셋째, 군집 형태로 임무를 수행할 수 있어야 한다. 곤충형 로봇은 다수의 로봇을 임무에 투입시켜 서로 정보를 공유하며 더욱 빠르고 효율적으로 임무를 수행할 수 있다. 군집형 로봇 분야는 비교적 최근 연구가 시작되어 개체 간 통신 등에서 발전이 필요하다.
결론적으로, 곤충형 지상생체모방로봇을 실용화하기 위해서는 다양한 분야의 발전이 선행되어야 할 것으로 보이며, 나아가 각 분야 간의 긴밀한 협력을 바탕으로 로봇 시스템 융합이 진행돼야 할 것으로 생각된다.
ACKNOWLEDGMENTS
본 연구는 국방생체모방 자율로봇 특화연구센터를 통한 방위사업청과 국방과학연구소 연구비 지원으로 수행되었습니다(UD160027ID). 이 연구는 LIG NEX1의 “높은 Payload에도 안정적 임무 수행이 가능한 생체모사 Jump-Crawler의 개발” 산학협력과제 지원으로 연구되었음.
REFERENCES
- 1.
Dickinson, M. H., Farley, C. T., Full, R. J., Koehl, M., Kram, R., et al., “How Animals Move: An Integrative View,” Science, Vol. 288, No. 5463, pp. 100-106, 2000.
10.1126/science.288.5463.100
- 2.
Koditschek, D. E., Full, R. J., and Buehler, M., “Mechanical Aspects of Legged Locomotion Control,” Arthropod Structure & Development, Vol. 33, No. 3, pp. 251-272, 2004.
10.1016/j.asd.2004.06.003
- 3.
Seok, S., Onal, C. D., Cho, K.-J., Wood, R. J., Rus, D., et al., “Meshworm: A Peristaltic Soft Robot with Antagonistic Nickel Titanium Coil Actuators,” IEEE/ASME Transactions on Mechatronics, Vol. 18, No. 5, pp. 1485-1497, 2013.
10.1109/TMECH.2012.2204070
- 4.
Kim, S., Clark, J. E., and Cutkosky, M. R., “Isprawl: Design and Tuning for High-Speed Autonomous Open-Loop Running,” International Journal of Robotics Research, Vol. 25, No. 9, pp. 903-912, 2006.
10.1177/0278364906069150
- 5.
Baisch, A. T. and Wood, R. J., “Pop-Up Assembly of a Quadrupedal Ambulatory Microrobot,” Proc. of Intelligent Robots and Systems in Intelligent International Conference, pp. 1518-1524, 2013.
10.1109/IROS.2013.6696550
- 6.
Baisch, A. T. and Wood, R. J., “Design and Fabrication of the Harvard Ambulatory Micro-Robot,” Robotics Research, pp. 715-730, 2011.
10.1007/978-3-642-19457-3_42
- 7.
Baisch, A. T., Heimlich, C., Karpelson, M., and Wood, R. J., “HAMR3: An Autonomous 1.7 g Ambulatory Robot,” Proc. of the Intelligent Robots and Systems, pp. 5073-5079, 2011.
10.1109/IROS.2011.6095063
- 8.
Goldberg, B., Zufferey, R., Doshi, N., Helbling, E. F., Whittredge, G., et al., “Power and Control Autonomy for High Speed Locomotion with an Insect-Scale Legged Robot,” IEEE Robotics and Automation Letters, Vol. 3, No. 2, pp. 987-993, 2018.
10.1109/LRA.2018.2793355
- 9.
Seitz, B. F., Goldberg, B., Doshi, N., Ozcan, O., Christensen, D. L., et al., “Bio-Inspired Mechanisms for Inclined Locomotion in a Legged Insect-Scale Robot,” Proc. of Robotics and Biomimetics IEEE International Conference, pp. 791-796, IEEE, 2014.
10.1109/ROBIO.2014.7090428
- 10.
Karpelson, M., Waters, B. H., Goldberg, B., Mahoney, B., Ozcan, O., et al., “A Wirelessly Powered, Biologically Inspired Ambulatory Microrobot,” Proc. of Robotics and Automation IEEE International Conference, pp. 2384-2391, 2014.
10.1109/ICRA.2014.6907190
- 11.
Hoffman, K. L. and Wood, R. J., “Passive Undulatory Gaits Enhance Walking in a Myriapod Millirobot,” Proc. of Intelligent Robots and Systems in Intelligent International Conference, pp. 1479-1486, 2011.
10.1109/IROS.2011.6094700
- 12.
Birkmeyer, P., Peterson, K., and Fearing, R. S., “DASH: A Dynamic 16 g Hexapedal Robot,” Proc. of Intelligent Robots and Systems International Conference, pp. 2683-2689, 2009.
10.1109/IROS.2009.5354561
- 13.
Haldane, D. W. and Fearing, R. S., “Running Beyond the Bio-Inspired Regime,” Proc. of Robotics and Automation International Conference, pp. 4539-4546, 2015.
10.1109/ICRA.2015.7139828
- 14.
Hoover, A. M., Burden, S., Fu, X.-Y., Sastry, S. S., and Fearing, R. S., “Bio-Inspired Design and Dynamic Maneuverability of a Minimally Actuated Six-Legged Robot,” Proc. of Biomedical Robotics and Biomechatronics 3rd International Conference, pp. 869-876, 2010.
10.1109/BIOROB.2010.5626034
- 15.
Peterson, K., Birkmeyer, P., Dudley, R., and Fearing, R., “A Wing-Assisted Running Robot and Implications for Avian Flight Evolution,” Bioinspiration & Biomimetics, Vol. 6, No. 4, Paper No. 046008, 2011.
10.1088/1748-3182/6/4/046008
- 16.
Lee, J. S. and Fearing, R. S., “Anisotropic Collapsible Leg Spines for Increased Millirobot Traction,” Proc. of Robotics and Automation International Conference, pp. 4547-4553, 2015.
10.1109/ICRA.2015.7139829
- 17.
Mongeau, J.-M., McRae, B., Jusufi, A., Birkmeyer, P., Hoover, A. M., et al., “Rapid Inversion: Running Animals and Robots Swing Like a Pendulum Under Ledges,” PloS One, Vol. 7, No. 6, Paper No. e38003, 2012.
10.1371/journal.pone.0038003
- 18.
Goldberg, J. D. and Fearing, R. S., “Force Sensing Shell Using a Planar Sensor for Miniature Legged Robots,” Proc. of Intelligent Robots and Systems International Conference, pp. 1494-1500, 2015.
10.1109/IROS.2015.7353565
- 19.
Jayaram, K. and Full, R. J., “Cockroaches Traverse Crevices, Crawl Rapidly in Confined Spaces, and Inspire a Soft, Legged Robot,” Proc. of the National Academy of Sciences, Vol. 113, No. 8, pp. 950-957, 2016.
10.1073/pnas.1514591113
- 20.
Saranli, U., Buehler, M., and Koditschek, D. E., “RHex: A Simple and Highly Mobile Hexapod Robot,” International Journal of Robotics Research, Vol. 20, No. 7, pp. 616-631, 2001.
10.1177/02783640122067570
- 21.
Galloway, K. C., Haynes, G. C., Ilhan, B. D., Johnson, A. M., Knopf, R., et al., “X-RHex: A Highly Mobile Hexapedal Robot for Sensorimotor Tasks,” Penn Engineering, Vol. 8,
https://repository.upenn.edu/ese_reports/8/ (Accessed 7 SEP 2018)
- 22.
Spagna, J. C., Goldman, D. I., Lin, P.-C., Koditschek, D. E., and Full, R. J., “Distributed Mechanical Feedback in Arthropods and Robots Simplifies Control of Rapid Running on Challenging Terrain,” Bioinspiration & Biomimetics, Vol. 2, No. 1, p. 9, 2007.
10.1088/1748-3182/2/1/002
- 23.
Morrey, J. M., Lambrecht, B., Horchler, A. D., Ritzmann, R. E., and Quinn, R. D., “Highly Mobile and Robust Small Quadruped Robots,” Proc. of Intelligent Robots and Systems in Intelligent International Conference, pp. 82-87, 2003.
- 24.
Lewinger, W. A., Harley, C. M., Ritzmann, R. E., Branicky, M. S., and Quinn, R. D., “Insect-Like Antennal Sensing for Climbing and Tunneling Behavior in a Biologically-Inspired Mobile Robot,” Proc. of Robotics and Automation International Conferenc, pp. 4176-4181, 2005.
- 25.
Zarrouk, D., Pullin, A., Kohut, N., and Fearing, R. S., “Star, a Sprawl Tuned Autonomous Robot,” Proc. of Robotics and Automatio International Conference, pp. 20-25, 2013.
10.1109/ICRA.2013.6630551
- 26.
Koh, J.-S. and Cho, K.-J., “Omega-Shaped Inchworm-Inspired Crawling Robot with Large-Index-and-Pitch (LIP) SMA Spring Actuators,” IEEE/ASME Transactions On Mechatronics, Vol. 18, No. 2, pp. 419-429, 2013.
10.1109/TMECH.2012.2211033
- 27.
Lee, D., Kim, S., Park, Y.-L., and Wood, R. J., “Design of Centimeter-Scale Inchworm Robots with Bidirectional Claws,” Proc. of Robotics and Automation International Conference, pp. 3197-3204, 2011.
10.1109/ICRA.2011.5980458
- 28.
Lin, H.-T., Leisk, G. G., and Trimmer, B., “Goqbot: A Caterpillar-Inspired Soft-Bodied Rolling Robot,” Bioinspiration & Biomimetics, Vol. 6, No. 2, Paper No. 026007, 2011.
10.1088/1748-3182/6/2/026007
- 29.
Kovac, M., Fuchs, M., Guignard, A., Zufferey, J.-C., and Floreano, D., “A Miniature 7 g Jumping Robot,” Proc. of Robotics and Automation International Conference, pp. 373-378, 2008.
10.1109/ROBOT.2008.4543236
- 30.
Scarfogliero, U., Stefanini, C., and Dario, P., “Design and Development of the Long-Jumping “Grillo” Mini Robot” Proc. of Robotics and Automation International Conference, pp. 467-472, 2007.
10.1109/ROBOT.2007.363830
- 31.
Nguyen, Q.-V. and Park, H. C., “Design and Demonstration of a Locust-Like Jumping Mechanism for Small-Scale Robots,” Journal of Bionic Engineering, Vol. 9, No. 3, pp. 271-281, 2012.
10.1016/S1672-6529(11)60121-2
- 32.
Kovač, M., Schlegel, M., Zufferey, J.-C., and Floreano, D., “Steerable Miniature Jumping Robot,” Autonomous Robots, Vol. 28, No. 3, pp. 295-306, 2010.
10.1007/s10514-009-9173-4
- 33.
Li, F., Bonsignori, G., Scarfogliero, U., Chen, D., Stefanini, C., et al., “Jumping Mini-Robot with Bio-Inspired Legs,” Proc. of Robotics and Biomimetics International Conference, pp. 933-938, 2009.
- 34.
Li, F., Liu, W., Fu, X., Bonsignori, G., Scarfogliero, U., et al., “Jumping Like an Insect: DESIGN and Dynamic Optimization of a Jumping Mini Robot Based on Bio-Mimetic Inspiration,” Mechatronics, Vol. 22, No. 2, pp. 167-176, 2012.
10.1016/j.mechatronics.2012.01.001
- 35.
Zhao, J., Xu, J., Gao, B., Xi, N., Cintron, F. J., et al., “MSU Jumper: A Single-Motor-Actuated Miniature Steerable Jumping Robot,” IEEE Transactions on Robotics, Vol. 29, No. 3, pp. 602-614, 2013.
10.1109/TRO.2013.2249371
- 36.
Zhao, J., Zhao, T., Xi, N., Mutka, M. W., and Xiao, L., “MSU Tailbot: Controlling Aerial Maneuver of a Miniature-Tailed Jumping Robot,” IEEE/ASME Transactions on Mechatronics, Vol. 20, No. 6, pp. 2903-2914, 2015.
10.1109/TMECH.2015.2411513
- 37.
Zaitsev, V., Gvirsman, O., Hanan, U. B., Weiss, A., Ayali, A., et al., “A Locust-Inspired Miniature Jumping Robot,” Bioinspiration & Biomimetics, Vol. 10, No. 6, Paper No. 066012, 2015.
10.1088/1748-3190/10/6/066012
- 38.
Noh, M., Kim, S.-W., An, S., Koh, J.-S., and Cho, K.-J., “Flea-Inspired Catapult Mechanism for Miniature Jumping Robots,” IEEE Transactions on Robotics, Vol. 28, No. 5, pp. 1007-1018, 2012.
10.1109/TRO.2012.2198510
- 39.
Koh, J.-S., Jung, S.-P., Noh, M., Kim, S.-W., and Cho, K.-J., “Flea Inspired Catapult Mechanism with Active Energy Storage and Release for Small Scale Jumping Robot,” Proc. of Robotics and Automation International Conference, pp. 26-31, 2013.
10.1109/ICRA.2013.6630552
- 40.
Koh, J.-S., Yang, E., Jung, G.-P., Jung, S.-P., Son, J. H., et al., “Jumping on Water: Surface Tension–Dominated Jumping of Water Striders and Robotic Insects,” Science, Vol. 349, No. 6247, pp. 517-521, 2015.
10.1126/science.aab1637
- 41.
Burrows, M. and Sutton, G., “Interacting Gears Synchronize Propulsive Leg Movements in a Jumping Insect,” Science, Vol. 341, No. 6151, pp. 1254-1256, 2013.
10.1126/science.1240284
- 42.
Jung, G.-P. and Cho, K.-J., “Froghopper-Inspired Direction-Changing Concept for Miniature Jumping Robots,” Bioinspiration & Biomimetics, Vol. 11, No. 5, Paper No. 056015, 2016.
10.1088/1748-3190/11/5/056015
- 43.
Daltorio, K. A., Horchler, A. D., Gorb, S., Ritzmann, R. E., and Quinn, R. D., “A Small Wall-Walking Robot with Compliant, Adhesive Feet,” Proc. of Intelligent Robots and Systems International Conference, pp. 3648-3653, 2005.
10.1109/IROS.2005.1545596
- 44.
Spenko, M., Haynes, G. C., Saunders, J., Cutkosky, M. R., Rizzi, A. A., et al., “Biologically Inspired Climbing with a Hexapedal Robot,” Journal of Field Robotics, Vol. 25, Nos. 4-5, pp. 223-242, 2008.
10.1002/rob.20238
- 45.
Lam, T. L. and Xu, Y., “Biologically Inspired Tree?Climbing Robot with Continuum Maneuvering Mechanism,” Journal of Field Robotics, Vol. 29, No. 6, pp. 843-860, 2012.
10.1002/rob.21414
- 46.
Jung, G.-P., Casarez, C. S., Jung, S.-P., Fearing, R. S., and Cho, K.-J., “An Integrated Jumping-Crawling Robot Using Height-Adjustable Jumping Module,” Proc. of Robotics and Automation International Conference, pp. 4680-4685, 2016.
10.1109/ICRA.2016.7487668
- 47.
Lambrecht, B. G., Horchler, A. D., and Quinn, R. D., “A Small, Insect-Inspired Robot that Runs and Jumps,” Proc. of Robotics and Automation International, pp. 1240-1245, 2005.
- 48.
Zhang, J., Song, G., Qiao, G., Li, Z., Wang, W., et al., “A Novel One-Motor Driven Robot that Jumps and Walks,” Proc. of Robotics and Automation International Conference, pp. 13-19, 2013.
10.1109/ICRA.2013.6630550
- 49.
Meyers, R. A., Stakebake, E. F., “Anatomy and Histochemistry of Spread-Wing Posture in Birds. 3. Immunohistochemistry of Flight Muscles and the “Shoulder Lock” in Albatrosses”, Journal of Morphology Vol. 263, No. 1, pp. 12-29, 2005.
10.1002/jmor.10284
- 50.
Vidyasagar, A., Zufferey, J.-C., Floreano, D., and Kovač, M., “Performance Analysis of Jump-Gliding Locomotion for Miniature Robotics,” Bioinspiration & Biomimetics, Vol. 10, No. 2, Paper No. 025006, 2015.
10.1088/1748-3190/10/2/025006
- 51.
Desbiens, A. L., Pope, M. T., Christensen, D. L., Hawkes, E. W., and Cutkosky, M. R., “Design Principles for Efficient, Repeated Jumpgliding,” Bioinspiration & Biomimetics, Vol. 9, No. 2, Paper No. 025009, 2014.
10.1088/1748-3182/9/2/025009
- 52.
Woodward, M. A. and Sitti, M., “Multimo-Bat: A Biologically Inspired Integrated Jumping–Gliding Robot,” International Journal of Robotics Research, Vol. 33, No. 12, pp. 1511-1529, 2014.
10.1177/0278364914541301
- 53.
Beck, A., Zaitsev, V., Hanan, U. B., Kosa, G., Ayali, A., et al., “Jump Stabilization and Landing Control by Wing-Spreading of a Locust-Inspired Jumper,” Bioinspiration & Biomimetics, Vol. 12, No. 6, Paper No. 066006, 2017.
10.1088/1748-3190/aa8ceb
- 54.
Yanagida, T., Elara Mohan, R., Pathmakumar, T., Elangovan, K., and Iwase, M., “Design and Implementation of a Shape Shifting Rolling–Crawling–Wall-Climbing Robot,” Applied Sciences, Vol. 7, No. 4, pp. 342, 2017.
10.3390/app7040342
- 55.
Pope, M. T., Kimes, C. W., Jiang, H., Hawkes, E. W., Estrada, M. A., et al., “A Multimodal Robot for Perching and Climbing on Vertical Outdoor Surfaces,” IEEE Transactions on Robotics, Vol. 33, No. 1, pp. 38-48, 2017.
10.1109/TRO.2016.2623346
Biography
- Sang-Min Baek
Ph.D. candidate in the Department of Mechanical and Aerospace Engineering, Seoul National University. His research interest is Bio-inspired robots.
- Jong-Eun Lee
Ph.D. student in the Department of Mechanical and Aerospace Engineering, Seoul National University. His research interest is Bio-inspired robots.
- Sojung Yim
M.S. student in the Department of Mechanical and Aerospace Engineering, Seoul National University. Her research interest is Bio-inspired robots.
- Suhwan Chae
M.S. student in the Department of Mechanical and Aerospace Engineering, Seoul National University. His research interest is Bio-inspired robots.
- Gwang-Pil Jung
Professor in the Department of Mechanical & Automotive Engineering, Seoul National University of Science & Technology. His research interest is Bio-inspired robots.
- Kyu-Jin Cho
Professor in the Department of Mechanical and Aerospace Engineering, Seoul National University. His research interest is Bio-inspired Soft robots.