ABSTRACT
This study shows the 4 - Bar linkage design process and static/dynamic stability analysis of a foldable electric wheelchair that can be loaded into a vehicle for long-distance trips. Conventional foldable electric wheelchairs have been developed for indoor use because the safety of the disabled is not secure enough for outdoor use. However, the disabled have generally used foldable electric wheelchairs for outdoor use, potentially putting themselves in a dangerous situation. The body of a foldable electric wheelchair consists of a double 4 - Bar linkage system that shares one link. The architecture of the wheelchair’s four-bar linkage frame was synthesized using four finitely separated design positions. This simple method can design a planar four-bar mechanism through the use of four finitely separated poses (orientation and position). The power driving module includes a battery and controller, and can be separated to load into a car easily. An analysis of the tip-over measurement was performed using ADAMS and LifeMOD during a maneuver on the ground. by force-moment stability metric. Several elements, including the center of gravity position, rotational radius, and acceleration, were evaluated how to affect stability metric.
-
KEYWORDS: Electric wheelchair, Foldable wheelchair, 4 - Bar linkage, Tip-over, Stability metric, Separable power module
-
KEYWORDS: 전동휠체어, 접이식 휠체어, 4바 링크, 전도, 안정도, 분리형 구동부
NOMENCLATURE
Rotation matrix of a body in lth position
Position vectors of local coordinates in lth position
Wheel-terrain contact points
Stability measurement with respect to ith tipover axis
Support Force at ith contact point
The moment of inertia about the body c.g.
The moment caused by support forces
1. 서론
이동에 제한이 많은 척수마비 장애인들에게 휠체어는 없어서는 안될 매우 중요한 이동수단이다. 많은 장애인이 사용하고 있는 수동휠체어는 일반적으로 20 kg 내외의 알루미늄 프레임으로 되어있고 사용자가 휠체어를 좌우로 접어 쉽게 차량에 적재가 가능하다. 하지만 사용자가 직접 휠체어를 구동해야 하므로 상체 근피로도가 가중되는 문제점이 있다. 반면에 전동휠체어는 전기를 동력으로 하여 모터의 힘으로 작동되므로 사용자의 근피로도가 적은 장점이 있다. 하지만 전동휠체어 차체의 무게가 무겁고 부피가 커서 경사로나 리프트 등이 장착된 특수차량에 의해서만 이동만 가능하기 때문에 장거리 여행에는 적합하지가 않았다. 더군다나 장애인들 삶의 질이 향상되면서 이동에 대한 욕구가 높아지고 있는 현실에서 기존의 전동휠체어로는 이동에 많은 제약이 따르기 때문에 그들의 욕구를 충족시켜줄 수 없었다.
최근에는 무겁고 부피가 큰 전동휠체어를 대신하기 위해서 폴딩 전동휠체어가 개발되었다. 현재 출시되어 있는 폴딩 전동휠체어로는 중국의 Goldenmotor 사에서 개발한 폴딩 전동휠체어가 있다. 이 제품은 Brushless In-Wheel 모터와 인산철 배터리를 사용하였으며 등 뒤에 있는 접이용 와이어를 잡아당기면 전동휠체어를 접을 수 있다. 대만의 Zinger 체어는 접이가 가능한 이동식 의자로서 48 V, 250 W DC 모터 1개로 양쪽 레버를 이용하여 좌우 구동바퀴에 동력을 전달하고 레버와 구동바퀴와 접촉여부에 따라서 동력을 단락시켜 전후진, 방향전환 및 브레이크 기능이 가능하며, 폴딩 메커니즘은 단순 4 - Bar 링크 구조를 이용하여 접이가 가능하다. 하지만 이 의자는 노인용으로 개발된 것으로 상지 장애가 있는 장애인이 사용하기에는 부적합하다. 또한 대만의 FreeRider 사의 Luggie 폴딩 스쿠터는 비행기에도 실을 수 있도록 전용백을 제공하고 있다. 하지만 이러한 폴딩 전동휠체어는 접이 기능에 충실한 나머지 사이즈가 작고 시트부의 쿠션기능이 부실하여 중증 장애인이 사용하기에는 매우 불편하다.
Fig. 1 Folding wheelchair (Goldenmotor), folding chair (Zinger) and folding scooter (Luggie)

상기에서 언급한 폴딩 전동휠체어는 실내용으로 개발된 것으로 구조적 안전성이 검증되지 않아 실외용으로 사용하기에는 부적합하다.
전동휠체어는 노인 및 장애인이 타고 다니는 이동기기로서 사용자의 체중에 의한 구조적 안정성 이외에 동적 안정성 확보가 중요하다. 동적 안정성 연구는 차량이나 로봇분야에서 많이 진행되어 왔다. Messuri
1는 부정형 지형에서 로봇 다리의 안정성 제어를 위해 에너지 안정성 마진을 이용하여 로봇 다리 위치에 따른 에너지 차를 최소화하는 방법을 제시하였으며, Ghasempoor
2는 로봇 매니퓰레이터가 임의의 위치에 있을 때 로봇의 동적 안정성을 측정하기 위해서 Force-Angle 안정성 측정법을 고안하였으며, Peters
3는 Force-Angle 안정성 측정법의 방법을 보안하여 고속으로 주행하는 자동차 등에서도 안정성을 측정할 수 있도록 Force-Moment 안정성 측정법을 제시하였다.
본 연구에서는 장애인이 여행용으로 차량 적재가 가능한 폴딩형 전동휠체어 차체 설계를 위하여 4 - FSP (Finitely Separated Positions) 방법을 이용해서 4 - Bar 링크를 설계하는 과정에 대해서 설명하고, Force-Moment 안정성 측정법을 전동휠체어에 적용하여 전도해석을 통해 동적 안정성을 분석하였다. 전도해석은 평지에서 전동휠체어가 실제사용 조건을 바탕으로 직선 가속구간, 감속구간, 회전등속구간, 회전가속구간 등을 설정하여 회전반경, 가속도, 전동휠체어의 무게중심점 위치에 따른 전도 안정도 값을 다물체 동역학 해석프로그램인 ADAMS (MSC Software, Newport Beach, CA, USA)와 인체 해석 프로그램인 LifeMOD (Lifemodeler, San Clemente, CA, USA) 프로그램을 통해 비교 분석하였다.
또한 전도해석 결과를 바탕으로 전동휠체어 제어기에 회전율(Rotation Ratio) 개념을 도입하였으며 속도에 따른 회전 정도와 주행속도를 측정하였다. 전동휠체어를 차량에 적재하기 위해서 차체와 구동부를 분리하는 메커니즘을 적용하여 제작하였으며 In-Wheel 모터 타입의 BLDC 모터와 전자식 브레이크 등을 개발하였으며 배터리와 각종 부속장치를 제작하였다. 최종적으로 제작된 폴딩 전동휠체어에 대한 시험평가를 진행하였다.
2. 4 - Bar 링크 기구 합성법
2.1 프로그래밍 방법을 통한 기구 합성법
컴퓨터 CPU 속도가 빨라짐에 따라 기구를 합성하는 시간을 단축시켜 줌으로써 복잡한 메커니즘을 설계할 수 있게 되었다. 기구학적 구속 프로그래밍(Geometric Constraint Programming; GCP) 방법은 Kinzel
4에 의해서 제안되었으며 이 방법은 기구 합성의 파라메트릭 문제를 직관적으로 풀 수 있는 기술이다. GCP의 주요 특징은 설계자가 커플러 링크의 특정 지점의 위치와 각도 값을 통해 4 - Bar 링크의 기하학적 해를 정확하게 알 수 있는 방법이다.
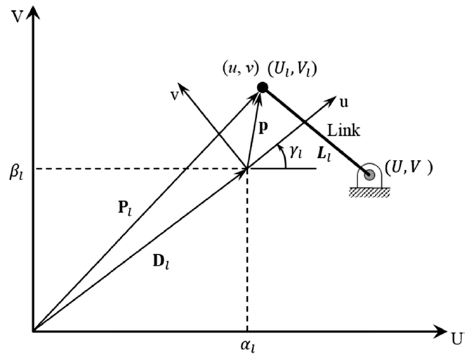
Fig. 2는 링크를 설계하기 위해 글로벌 좌표계와 링크상의 로컬 좌표계를 정의한 것이다.
Fig. 2Definition of coordinates of RR dyad
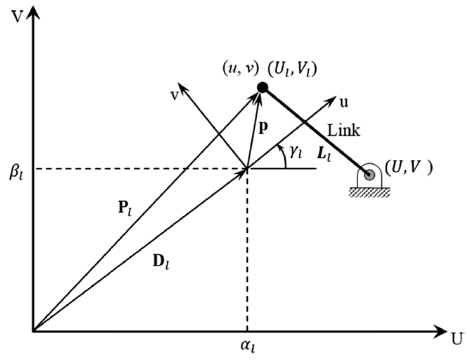
구속 방정식을 정의하기 위해 (U, V) 지점에서 회전 조인트를 갖는 링크를 가정하면 글로벌 좌표계에서 피벗점은,
여기서 Rl과 Dl은 각각 회전 매트릭스와 로컬 좌표계에서의 위치 벡터이다.
여기서
αl,
βl와
γl는
l번째 지점에서의 글로벌 좌표계의 위치와 각도 값이다. 커플러 링크의 길이는 4개의 지점을 지나도 항상 일정하므로
식(3)과
식(4)와 같이 표현할 수 있다.
여기서
Ll은
l번째 상태에서의 커플러 링크의 길이이다.
식(4)는 kinematic Constraint Equation이라 하고
식(2)를 이용해서
식(3)에 대입하여 전개하면 얻을 수 있는데 여기서
Dl,
El과
Fl은
αl,
βl와
γl로 이루어진 새로운 계수이다. 4 - FSP의 해를 구하는 방정식은 다음과 같다.
식(5)를 만족하는 조건은 |
Dl El Fl| = 0이고 이를 전개하면
u에 대한 3차 방정식이 되는데 설계자는 커플러 링크의 원하는
u값을 선택하여
v값을 결정하고 최종적으로 (
U,
V)값을 계산함으로써 링크의 길이를 구할 수 있다.
상기에서 언급한 바와 같이 일련의 과정을 Visual Basic으로 프로그래밍하여 4 - Bar 링크 시스템을 설계하였다. 전동휠체어의 링크 시스템은 캐스터에 있는 4 - Bar 링크와 시트부의 4 – Bar 링크로 구성되어 있으며 두 링크는
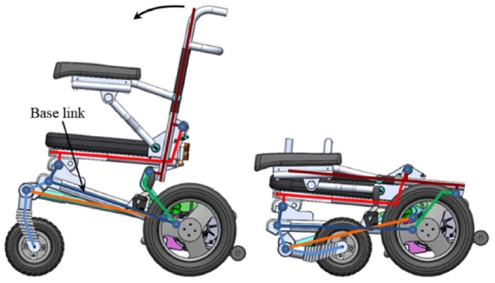
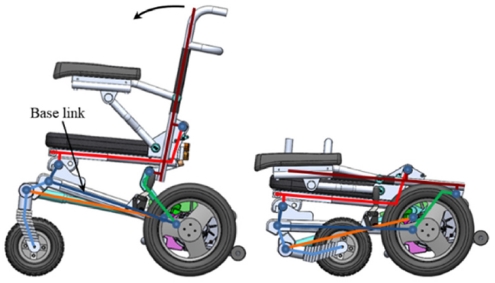
Fig. 3과 같이 Base 링크로 공유하고 있는 구조이다. 이러한 구조적 특징으로 인해서
Fig. 3과 같이 시트부를 앞으로 밀면 전동휠체어의 시트부와 캐스터부가 한번에 폴딩된다.
Fig. 3The design results of 4 - Bar linkage (left : unfolding, right : folding)
3. 전도 안정도 해석
3.1 안정도 측정법
이번 장에서는 전동휠체어의 전도 안정도 측정법에 대해서 소개하고자 한다.
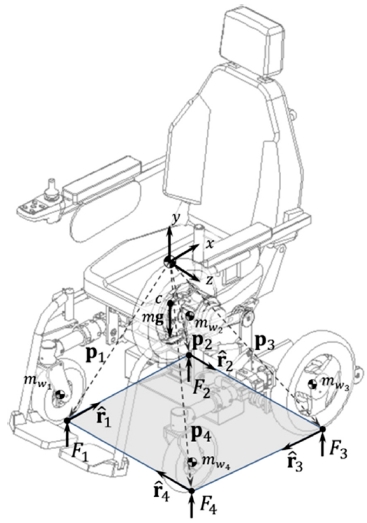
6 전동휠체어에 휠이
n개 있을 때 지면과 접촉되어 있는 점을 p
i,
i = {1,...,
n}라 하며
Fig. 4와 같이 시계방향으로 번호를 매기며 이 점들을 이은 면을 지지다각면(Support Polygon)이라고 한다. 연이어 있는 지면 접촉점을 서로 이은 선을 전도축(Tipover Axes)이라고 정의하고 r
i로 표기하며 다음
식(6)과 같이 계산한다.
Fig. 4Free body diagram of foldable electric wheelchair for tipover analysis
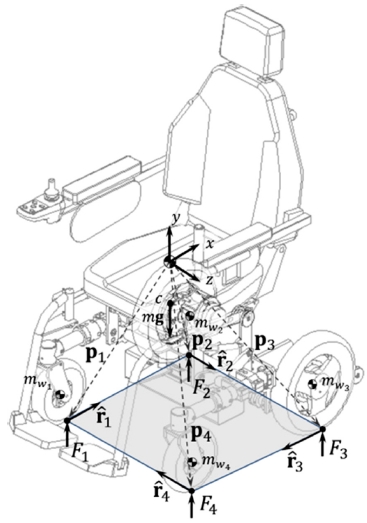
전동휠체어에 작용하는 힘과 모멘트는 3분류로 나눌 수 있다. 접촉점 pi에서 발생하는 n개의 지면반발력 Fi, qi점에서 발생하는 k개의 내부힘 Bj, j = {1,...,k}, 전동휠체어 무게중심점 c에서 발생하는 관성력 -mac이 있다. 내부힘 Bj는 qj점에서 발생하는 중력과 공기저항에 의한 외란 등이 포함된다. 따라서 전동휠체어의 내부 힘은 무게중심점 에서 발생하는 중력 Bj = mg이다. 전동휠체어의 안정성 측정은 i번째 전도축을 중심으로 내부힘과 관성력에 대한 모멘트를 다음과 같이 계산하게 된다.
이 모멘트 값을 안정성 측정값(Stability Measurement)이라 정의하고 전동휠체어가 평지에 정지되어 있을 때를 SM0라고 표시한다. 전동휠체어가 이동시 계산되는 모멘트를 이 값으로 정규화하며 모든 전도축에 대해서 정규화된 최소값을 취해서 안정도(Stability Metric) 값이라 한다.
식(8)은 내부력에 의해 발생하는 순수한 모멘트를 계산한 값이며 지면 반발력은 고려되지 않았다. 모멘트는 각운동량 보전법칙에 의해서
식(9)와 같이 각운동량 변화량과 같다.
여기서 모멘트 M
i는 지면반발력과 내부력을 포함한 식이며, 각 운동량 H
i는 무게중심점에서의 관성모멘트와 각속도에 관한 식이며 이를 정리하면
식(10)과 같다.
여기서 H·i*는
따라서 최종적인 안정성 측정값은 다음과 같이 표현한다.
만일 전동휠체어가 정지되어 있다면 지면반발력만 작용하여 안정성 측정값은 항상 양의 값을 가지게 된다. 하지만 안정성 측정값이 음의 값을 가지게 되면 각 운동량 항의 영향으로 인한 것이며 이런 경우에는 전동휠체어가 전도된 것으로 간주한다. 이는 전동휠체어는 지면반발력에 의해서 항상 안정성을 유지하지만 전동휠체어의 동적 움직임으로 인하여 안정성을 잃을 수 있다고 설명할 수 있다.
하지만 안정성 측정값이 음의 값을 가진다고 해서 항상 전동휠체어가 전도된다는 의미는 아니며 순간적인 불안정 모멘트에 의해서 순간적으로 영향을 받았다고 볼 수도 있다.
3.2 파라미터에 따른 해석결과
전동휠체어의 안정도 해석을 위해 파라미터 연구를 진행하였다. 전후 무게 비율, 가속도, 회전반경 등 3개의 파라미터에 대해서 전동휠체어에 미치는 영향을 분석하였다. Choi
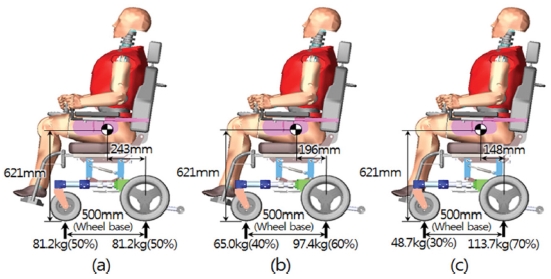
5은 전동휠체어의 전후 무게 비율이 전후 약 3:7정도 된다고 하였고 전후 무게 비율에 따른 안정도 영향 분석을 위해 전동휠체어의 시트부와 메인 차체를 전후 방향으로 이동할 수 있도록 제작하였으며 전동휠체어의 무게는 62.4 kg이며 전동휠체어와 인체 더미를 더한 무게에 대해서 전후 무게 비율은 3:7, 4:6, 5:5 등 3 종류로 선정하였다.
Fig. 5는 전동휠체어에 100 kg 표준더미를 적용하여 무게 비율에 따른 3 종류의 무게 중심점을 보여주고 있다. 상지는 표준자세로 고정하여 시뮬레이션시 상지의 움직임을 배제하였다. 무게중심점의 높이는 621 mm로 일정하였으며 축간거리는 500 mm로 설계하였다.
Fig. 5Positions of weight center with respect to weight ratio of front and rear wheel (a) 50% of total weight on front wheel (b) 40% of total weight, (c) 30% of total weight

두 번째 파라미터인 가속도는 관성력이 안정도에 미치는 영향을 분석하기 위함이며 회전구간에서 가속조건을 1, 2, 3 m/s2으로 설정하여 안정도를 계산하였다.
마지막 요소인 회전 반지름은 전동휠체어가 최대속도 주행 중 1, 2 m 각각에 대해서 시뮬레이션을 실시하였다.
안정도 해석 과정은 1초간 안정 상태로 정지한 후 출발하여 이후 3초간 최대 속도 10 km/h로 가속하고 1초간 최대 속도로 유지한 후 0.5초간 4 km/h로 감속하면서 회전하면서 4 km/h로 유지한 후 회전 구간 말단에서 가속하여 10 km/h로 직선 운동하는 것으로 마무리 한다. 회전구간은 90도로 회전 반지름 1, 2 m 조건에 따라 회전하며 회전 마지막 구간에서 가속은 1, 2, 3 m/s2 조건에 따라 이루어진다.
파라미터에 대한 안정도 해석을 실시한 결과 무게 비율과 가속도 값이 안정도에 큰 영향을 미치는 것으로 나타났다.
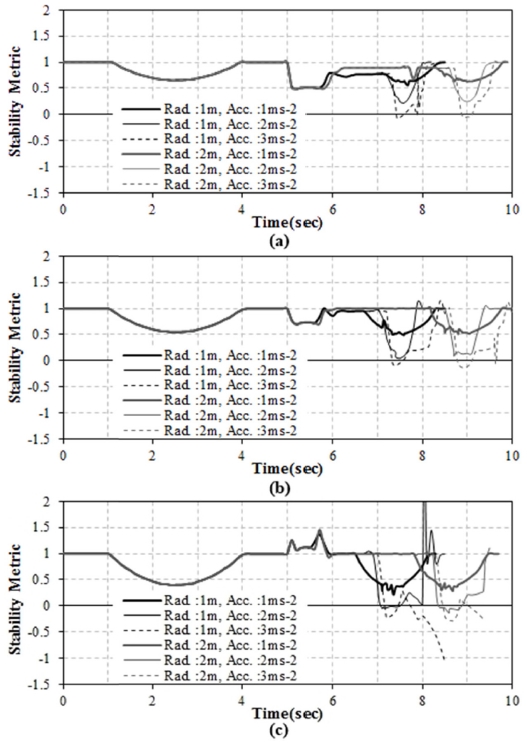
Fig. 6은 전동휠체어가 이동시 파라미터에 따른 안정도 변화 값을 나타내고 있다.
Fig. 6Stability metric with respect to weight ratio, radius and acceleration. (a) 50% of total weight on front wheel (b) 40% of total weight (c) 30% of total weight
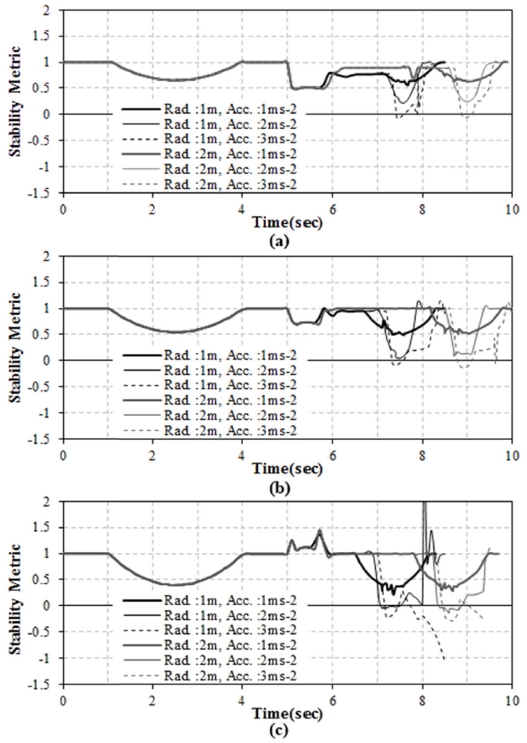
안정도는 가속하는 회전구간에서 의미 있는 변화가 나타났으며 전후 무게비율이 후방에 있을수록 안정도가 낮게 나타났다. 하지만 회전반경에 따른 안정도 변화는 크지 않은 것으로 나타났다.
Table 1은 회전구간에서의 최저 안정도 값을 나타내고 있다. 표에서 * 표시는 모의해석 도중 전동휠체어가 전도되지는 않았지만 회전도중 한쪽 바퀴가 지면에서 살짝 떠있는 구간이 있었다는 뜻이며 이 현상은 Marginal Stable 상태로써 이보다 안전한 방향으로 전동휠체어를 설계 및 제어해야 한다.
Table 1Minimal stability measures during rotational region
Table 1
|
Weight ratio (F:R) |
5:5 |
4:6 |
3:7 |
|
Radius (m) |
1 |
2 |
1 |
2 |
1 |
2 |
Acceleration
(m/s2) |
1 |
0.56 |
0.63 |
0.49 |
0.51 |
0.22 |
0.28 |
|
2 |
0.23*
|
0.25 |
0.04*
|
0.08*
|
T/O |
T/O |
|
3 |
T/O |
T/O |
T/O |
T/O |
T/O |
T/O |
4. 폴딩 전동휠체어 제작
4.1 전동휠체어용 In-Wheel 모터
일반적인 전동휠체어는 대부분 DC 모터로 구동되며 효율이 낮고 부피가 큰 문제점이 있었다. 하지만 In-Wheel 모터는 휠과 모터가 일체형이어서 부피를 최소화할 수 있으며 효율을 높일 수 있는 장점이 있다. 이러한 장점으로 인하여 기존의 모터 공간에 전동휠체어를 폴딩하기 위한 메커니즘 공간으로 활용할 수 있다.
최대 100 kg인 사용자가 10도 경사를 3 km/h의 속도로 올라가는데 필요한 동력은 모터효율을 고려하여 좌우에 각각 200 W급 모터가 필요하다. 개발된 BLDC 모터는 3상 8극 12슬롯 집중 권선형 델타결선으로 소음 진동에 강하고 기동 토크가 크며 좌우 대칭 구조로 되어 있다.
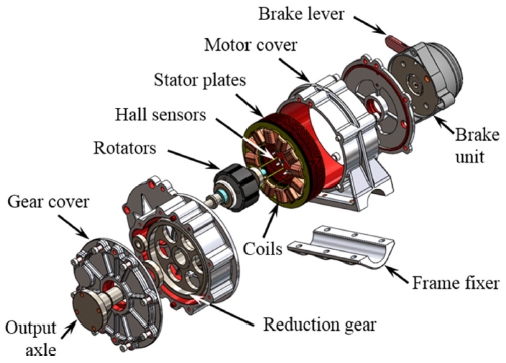
Fig. 7은 개발된 BLDC 모터의 전개도이다. BLDC 모터에는 전자식 제동장치가 장착되어 있는데 드라이브 모드에서 전원을 끄거나 조정기를 작동하지 않으면 자동으로 제동된다. 또한 비상시 전동장치와 제동장치를 분리시켜 프리휠 모드로 바꿀 수 있는 브레이크 레버도 갖추고 있다. 모터 감속기는 22.7:1의 헬리컬 기어를 사용하여 저소음, 고효율이 가능하였으며 감속기를 포함한 모터의 무게는 5.7 kg이며 12.5인치의 바퀴를 사용시 최대속도 6 km/h이고 기타 상세한 제원은
Table 2에 제시하였다.
Fig. 7The exploded view of developed BLDC in-wheel motor for the foldable electric wheelchair
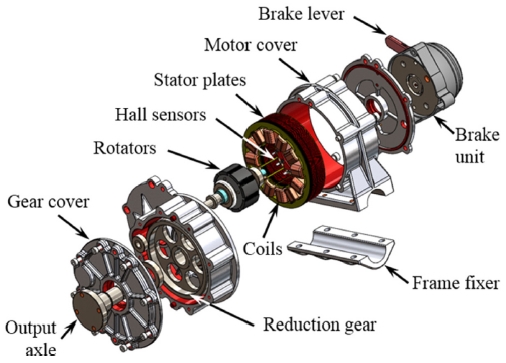
Table 2The specifications of the developed BLDC motor
Table 2
|
Input voltage |
24 V |
|
Nominal torque |
12 Nm |
|
Nominal power |
200 W |
|
Nominal current |
6 A |
|
Nominal speed |
99 rpm |
|
Max. efficiency |
68% |
|
Rotor diameter |
45.3 mm |
|
Number of poles |
12 |
|
Weights |
5.7 kg |
4.2 폴딩 전동휠체어 제어기
좌우에 장착된 2개의 모터는 회전 방법에 따라서 전후진 직선 주행, 전진 좌우회전, 후진 좌우회전, 제자리 좌우회전의 주행이 가능하다. 조정기에는
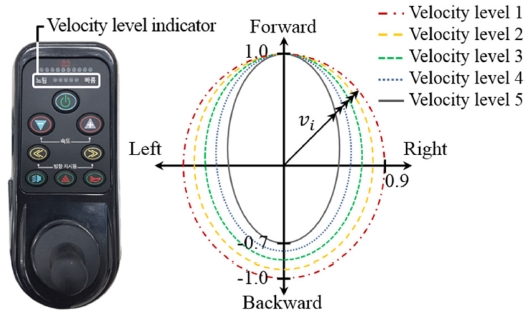
Fig. 8의 왼쪽과 같이 증속 및 감속할 수 있는 버튼이 있고 이 버튼을 작동하여 5 단계로 속도조절이 가능하며 1 단계인 저속 주행시는 최대속도가 2 km/h로써 조정기를 크게 움직임에도 느린 동작을 수행하며 반대로 5 단계인 고속 주행시는 최대속도가 6 km/h로써 빠르게 동작을 수행할 수 있도록 하였다. 최대후진속도는 ISO 7176-6에 따라서 최고속도 6 km/h의 70% 를 넘지 않도록 하였다.
Fig. 8Velocity level indicator of hand controller (left) and driving velocity calculation algorithm according to the velocity level of the foldable electric wheelchair (right)
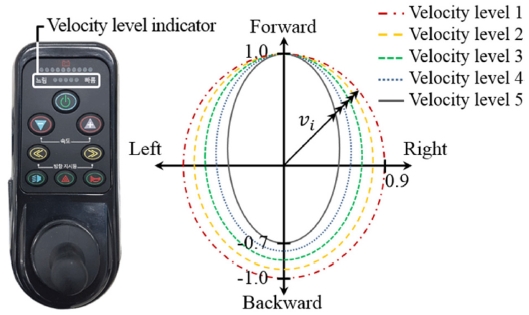
Fig. 8은 좌측에 있는 휠체어 조정기의 속도 단계에 따라서 폴딩 전동휠체어의 주행속도 계산방법을 설명한 그래프로써 저속주행 중 회전시 회전 요소를 상대적으로 크게 하여 공간이 좁은 곳이나 급커브 등의 운전을 용이하도록 하고, 고속주행 중 회전시 회전 요소를 저속주행 보다 작게 설정하여 회전시 관성에 의한 주행 이탈을 방지하여 안전성을 확보할 수 있도록 하였다. 또한 제자리 회전 중 전후진 운전과 같은 급작스런 상황에서도 전동휠체어가 부드러운 주행이 가능하도록 설계하였다. 속도 단계에 따른 속도
vi는
식(13)에 의해서 계산되며,
여기서
x는 좌우회전 방향,
y는 전후진 방향을 의미하며
ri는
i 단계에서의 최대 회전 비율,
si는 최대 전후진 비율,
ai는 최대 전진 비율이 최대 1이 되도록 하기 위한
y 축 이동 값이다. 예를 들면,
Fig. 8과 같이 1 단계에서는
ri는 0.9,
si는 1.0,
ai은 0이 되며 5 단계에서는
ri는 0.5,
si는 0.85가 되며
ai은 0.15가 된다.
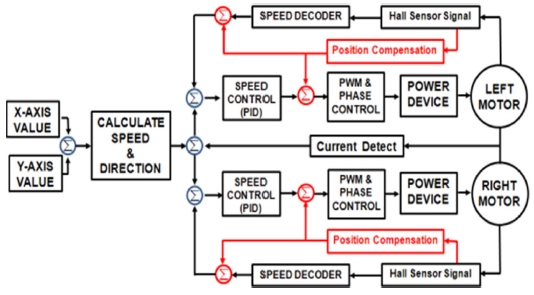
전동휠체어는 직진이나 후진시 좌우 모터가 동일한 속도로 회전해야 하지만 모터 특성상 Stepping Motor와 같이 펄스만큼만 동기되어 움직이는 모터를 제외한 DC 모터들은 사용환경에 따라 약간의 속도차이가 나는데 이는 동일 스펙의 모터라도 기계적인 마찰부의 저항, 모터 속 코어부의 밸런스, 사용된 자석의 미세한 자기력, 입력되는 전원부의 미세한 전압, 전류량 등의 차이에 따라서 속도차가 발생하며, 특히 BLDC 모터의 경우에는 홀 센서의 위치에 따라 모터의 상전환이 이루어지기 때문에 홀 센서의 위치 오차는 BLDC 모터의 토크 특성에도 많은 영향을 미친다.
위와 같은 요인으로 인해 발생하는 오차는
Fig. 7과 같이 홀 센서 3개를 이용하여 모터 속도를 정확히 검출하여 홀 센서의 모터의 오차를 최소화하였으며 Pulse Width Modulation (PWM) 방식을 적용하여 제어기의 PWM 출력포트를 통해 BLDC 모터에 신호가 전달되어 작동한다. 모터가 회전함에 따라 홀 센서의 출력신호는 조정기의
x,
y 위치에 따라 계산된 속도 입력값과 비교해서 모터의 속도를 제어한다. 또한 제어기는 홀 센서의 감지여부와 모터의 쇼트 및 과전압과 같은 이상여부를 실시간으로 모니터링하여 전동휠체어의 급발진을 최소화할 수 있도록 하였다.
전동휠체어의 차체는 2장에서 설명한 4 - FSP 방법을 이용해서 설계하였으며 장애인 LPG 차량에 탑재할 수 있도록 폴딩 메커니즘을 채택하였다. 하지만 LPG 차량의 트렁크 탑재공간은 비장애인 차량 대비 약 40% 정도 작아서 폴딩 구조 접는다고 해도 쉽게 적재되지 않기 때문에 차체와 구동모듈을 분리하였다. 구동 모듈을 분리시 사용자가 분리용 레버를 밀면 구동모듈이
Fig. 10과 같이 쉽게 분리되도록 원터치 탈착 시스템을 적용하였으며 결합은 구동모듈을 전동휠체어 차체에 있는 결합 홈에 끼워 결합하도록 하였다. 전동휠체어 전체 무게는 47.5 kg이며 전동휠체어를 펼쳤을 때 전체 크기는 1050 mm × 600 mm × 930 mm (길이 × 폭 × 높이)이며 전동휠체어를 접었을 때 차체의 전체 크기는 710 mm × 600 mm × 470 mm (길이 ×폭 × 높이)이다.
Fig. 9Block diagram of motor drive for foldable electric wheelchair
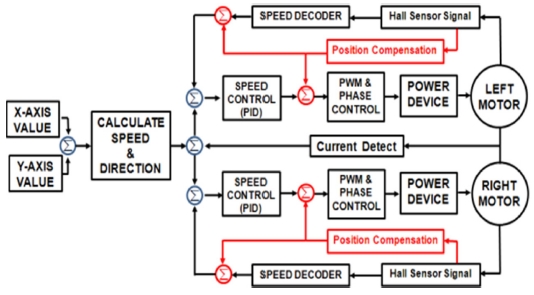
Fig. 10The prototype of foldable wheelchair with separable power module (left), folded electric wheelchair and separable power module including battery, in-wheel motor and controller (right)

폴딩 전동휠체어를 설계시 전도 안정성을 확보하기 위해서 최적설계를 하였으며 최대 100 kg더미를 올렸을 때 전후 무게 비율을 3.72:6.28로 하여 4:6에 근사하게 설계하였다.
5. 폴딩 전동휠체어 주행성능시험
5.1 주행 특성시험
전동휠체어의 주행 특성을 시험하기 위해서 조정기의 각도가 45도 각도일 때 회전지름과 주행속도를 계산하였다. 전동휠체어가 직선방향으로 최대속도에 도달하였을 때 탑승자가 우측 45도로 옮길 때 양쪽 바퀴의 회전속도를 측정하여 주행속도를 계산하였으며 탑승자는 조정기의 입력신호를 실시간으로 관찰하면서 45도에 유지하도록 하였다. 주행속도는1 단계(최대속도 : 2 km/h)에서 5 단계(최대속도 : 6 km/h)까지 단계별로 실험을 실시하였으며 단계별로 3회 측정하여 평균값을 취하였다. 주행속도 실험값은
식(13)에 의한 이론적 주행속도와 비교하였다.
이론적 주행속도는
식(13)에서 조정기가 45도 일 때
x와
y는 같으므로
x에 대한 2차식으로 표현이 가능하여
x값을 계산하여
Fig. 9와 같이 각 단계에 대한 속도
vi를 계산하고 이 값에 속도단계별 최대속도를 곱해서 주행속도를 계산하였다.
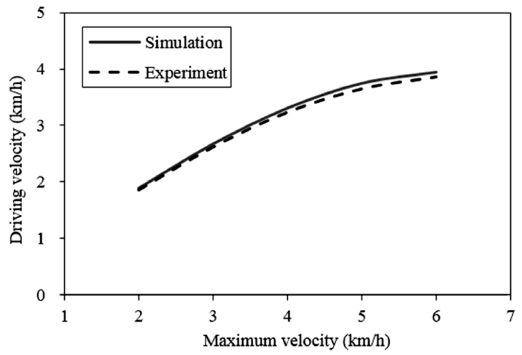
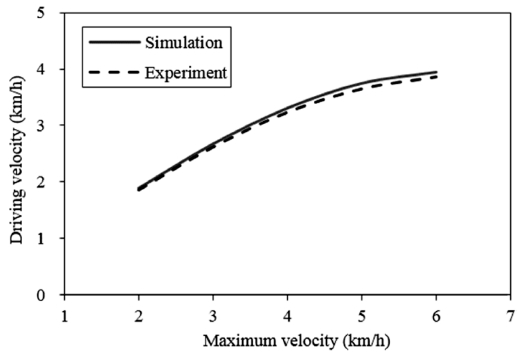
Fig. 11은 속도단계에 따른 이론적 주행속도와 실험 주행속도의 결과값이다. 실험 결과 이론적 주행속도와 유사하게 나타났으며 단계가 높을수록 차이가 나는 이유는 속도 증가에 따라서 전동휠체어 휠과 지면과의 마찰로 인하여 속도 저하가 나타났으며 속도 차이는 최대 약 2.7%로 나타났다.
Fig. 11Comparison with simulation and experimental driving velocity according to velocity level (maximum velocity)
5.2 성능시험
폴딩 전동휠체어의 성능을 평가하기 위해 ISO 7176에 따라서 주요 성능을 평가하였다. 평가항목은 실외용 전동휠체어 성능을 평가하기 위해 최대속도 시험, 정동적 안정성시험, 피로강도시험 등을 실시하였으며 결과를 확인하였다.
Fig. 12의 좌측 그림은 개발된 폴딩 전동휠체어의 20만회 피로강도시험 결과를 보여주고 있다. 피로강도시험은 전동휠체어의 안정성을 객관적으로 평가하기 위한 것으로 ISO 7176-8
9에 따라 요철이 달린 드럼에 전동휠체어를 올려놓고 20만회 구동 후 전동휠체어의 파손이 없어야 한다. 본 연구에서 개발된 폴딩 전동휠체어는 20만회 피로강도시험결과 어느 부위에서도 파손이 발견되지 않았다.
Fig. 12Fatigue strength test in accordance with ISO 7176-8 (left) and foldable electric wheelchair loaded in the car trunk (right)

에너지 소비 시험은 거리가 50 - 100 m인 시험용 트랙에서 최대속도로 20회 회전하여 전류 소모량을 측정하고 배터리의 에너지 용량으로 휠체어의 이동거리를 계산한다(ISO 7176-4
7). 본 연구에서는 용량이 20.3 Ah인 배터리를 사용하여 20회 회전하여 전류 소모량을 측정한 결과 약 35 km의 이동거리 결과를 얻었다.
폴딩 전동휠체어의 차량 적재 능력 테스트를 위해 전동휠체어를 접고 구동모듈을 분리하여 LPG 차량 트렁크에 적재한 결과 적재가 가능함을 알 수 있었으며
Fig. 12의 우측 그림은 폴딩 전동휠체어를 LPG 차량에 적재한 모습이다.
6. 결론
본 연구를 통해 장애인 차량에 탑재가 가능한 폴딩형 전동휠체어를 개발하였다. 폴딩 전동휠체어의 무게와 부피를 최소화하기 위해서 BLDC 타입의 In-Wheel 모터와 감속기를 개발하였으며 고강도 소재를 이용하여 경량 차체를 설계하였다. 폴딩 전동휠체어 초기모델에 대한 사용자 평가를 실시한 결과 분리개수가 많고 및 접이 과정이 복잡하여 사용에 어려움을 호소하였고 이에 따라 접이 과정을 1 단계로 단순화하고 발받침, 차체, 구동 모듈로 분리구조를 단순화하여 손쉽게 차량에 적재할 수 있도록 설계를 최적화하였다.
최소 부피를 갖는 차체 구조물을 설계하기 위해 FSP와 GCP방법으로 4 - Bar 링크를 합성하였으며 이 방식을 사용하면 기구합성을 직관적으로 빠르게 완성할 수 있는 장점이 있다.
전동휠체어의 동적 안전성을 위해 전도해석을 실시한 결과 전동휠체어의 전후방 무게 비율과 가속도 값이 안정도에 미치는 영향은 컸으며 회전 반지름은 안정도에 미치는 영향이 상대적으로 적었으며, 전동휠체어 전방 무게 비율은 전동휠체어와 사용자 체중과 합한 값의 약 40%로 설계하고 가감속은 2 m/s2 이내로 하는 것이 안전한 것으로 나타났다. 따라서 폴딩 전동휠체어 설계시 전후 무게 비율을 약 4:6으로 설계하였으며 가속도 값을 2 m/s2 미만으로 모터 속도 프로파일을 설정하였다.
전동휠체어의 전도는 회전구간에서 발생하는 것을 해석결과 알 수 있었으며 이러한 결과를 바탕으로 전동휠체어 제어기를 개발하였다. 전동휠체어 속도단계에 따라 탑승자가 최대속도에서 급회전시 회전율을 달리하여 전동휠체어가 전도되는 것을 방지하였다.
기존의 실외용(B타입) 전동휠체어는 100 kg가 넘고 부피가 크기 때문에 장애인이 버스나 승용차를 이용해서 장거리 이동이 불가능하였으나 본 연구에서 개발된 폴딩 전동휠체어는 전체 무게가 약 47 kg이며 모듈별 최대 무게가 20 kg 이하여서 보호자가 분리하여 차량에 적재 가능하다. 현재 개발된 전동휠체어의 모듈별 무게를 경량화하여 모듈별 무게를 15 kg 이하로 개발하여 장애인들에게 공급한다면 차량 적재가 보다 용이하고 장애인의 이동성을 증대할 수 있으며 국내외 시장에서도 경쟁력이 있을 것으로 기대한다.
ACKNOWLEDGMENTS
본 연구는 2014년 보건복지부 보건의료연구개발사업 지원으로 이루어진 연구입니다(과제번호: HI14C0745).
REFERENCES
- 1.
Messuri, D. and Klein, C., “Automatic Body Regulation for Maintaining Stability of a Legged Vehicle During Rough-Terrain Locomotion,” IEEE Journal on Robotics and Automation, Vol. 1, No. 3, pp. 132-141, 1985.
10.1109/JRA.1985.1087012
- 2.
Ghasempoor, A. and Sepehri, N., “A Measure of Machine Stability for Moving Base Manipulators,” Proc. of Robotics and Automation and IEEE International Conference, pp. 2249-2254, 1995.
- 3.
Peters, S. C. and Iagnemma, K., “An Analysis of Rollover Stability Measurement for High-Speed Mobile Robots,” Proc. of Robotics and Automation and IEEE International Conference, pp. 3711-3716, 2006.
- 4.
Kinzel, E. C., Schmiedeler, J. P., and Pennock, G. R., “Kinematic Synthesis for Finitely Separated Positions Using Geometric Constraint Programming,” Journal of Mechanical Design, Vol. 128, No. 5, pp. 1070-1079, 2006.
10.1115/1.2216735
- 5.
Choi, Y. C., Rhee, K. M., Choi, H. S., and Seo, Y. T., “Development of the Foldable Manual/Power Hybrid Wheelchair,” Journal of the Korean Society for Precision Engineering, Vol. 23, No. 2, pp. 172-180, 2006.
- 6.
Jang, D.-J., Kim, Y.-C., Kim, S.-K., Mun, M.-S., and Park, J.-C., “Study on Dynamic Tip-Over Analysis of Foldable Electric Wheelchair,” Journal of Rehabilitation Welfare Engineering & Assistive Technology, Vol. 10, No. 2, pp. 133-139, 2016.
10.21288/resko.2016.10.2.133
- 7.
ISO 7176-4, “Energy Consumption of Electric Wheelchairs and Scooters for Determination of Theoretical Distance Range,” 2008.
- 8.
ISO 7176-6 “Determination of Maximum Speed, Acceleration and Deceleration of Electric Wheelchairs,” 2001.
- 9.
ISO 7176-8 “Requirements and Test Methods for Static, Impact and Fatigue Strengths,” 2014.
Biography
- Dae Jin Jang
Senior researcher in COMWEL Korea Orthopedics and Rehabilitation Engineering Center. His research interests are rehabilitation robot, prosthetic hand and wheelchair.
- Yong Cheol Kim
Senior researcher in COMWEL Korea Orthopedics and Rehabilitation Engineering Center. His research interests is wheelchair.
- Shin Ki Kim
Research fellow in COMWEL Korea Orthopedics and Rehabilitation Engineering Center. His research interests are rehabilitation engineering, prosthetic leg and wheelchair.
- Je Cheong Ryu
Research director in COMWEL Korea Orthopedics and Rehabilitation Engineering Center. His research interests are rehabilitation robot, orthosis and prosthesis.