ABSTRACT
Research of different types of powered exoskeleton have been conducted for various purposes. Recently, the exoskeleton has been used in rehabilitation training for patients with walking problems. For the exoskeletons to appropriately assist the user in gait rehabilitation, it is essential to understand user's intention. The user's walking intention includes the temporal aspect of timing of movements and the quantitative aspect of how large the movement is. This study, quantitatively identifies the relationship between arm and leg movements during walking, the user's quantitative intention for gait, and suggests for a control strategy to assist user's movement accordingly for a 1DoF hip exoskeleton for hemiplegic gait rehabilitation.
-
KEYWORDS: Wearable robot, Powered exoskeleton, Gait rehabilitation
-
KEYWORDS: 웨어러블 로봇, 외골격 로봇, 보행 재활
1. 서론
외골격 로봇(Wearable Exoskeleton)은 사람이 착용할 수 있는 로봇으로, 인체 근골격계의 기능을 보조하여 그 능력을 향상시키기 위해 사용된다. 사람의 하지(下肢)를 목표 신체 부위로 하는 외골격 로봇은 인체 하반신의 힘을 보조해 착용자가 보행 또는 앉기나 서기 등의 활동을 하거나 하체로 하중을 지탱하도록 하는 것을 돕는다.
1,2 하지를 대상으로 하는 외골격 로봇은 그것의 주된 보조 목적에 따라서 (1)하반신의 힘을 보강해 무게를 지지할 수 있는 능력을 증진시키고 착용자에게 전달되는 하중을 경감시키기 위함,
3 (2)건강한 착용자의 운동능력을 향상시키고 운동에 의한 피로도 혹은 대사량을 감소시키기 위함,
4 (3)운동능력이 부족한 노약자나 환자를 대상으로 하여 일상적인 활동이 가능하도록 보조하기 위함,
5 (4)하반신을 전혀 움직일 수 없는 환자들의 움직임을 가능하게 하기 위함
6 등으로 분류할 수 있다.
7
하지를 대상으로 하는 외골격 로봇이 적용되는 분야 중 하나로서 보행에 대한 재활 훈련이 있다. 기존의 한 연구에서는 다리의 증세로 인해 걸음걸이에 불편함을 겪는 환자를 대상으로 하는 보행 재활 훈련에 외골격 로봇을 사용하였다.
8 종래의 보행 재활 훈련은 환자의 다리를 움직이기 위해 외부에서 힘을 가해주는 방식으로 진행되어왔다. 그리고 인력을 대체할 수 있고 반복적인 움직임을 수행하기 적합한 로봇이 보행 재활에 활용 되기도 했다. 인력에 의한 것이든 혹은 로봇에 의한 것이든 기존의 보행 재활 훈련은 지면에 고정된 구조물을 이용해 환자의 체중을 지탱하고, 인력 또는 로봇의 움직임을 통해 환자의 다리 움직임을 보조하는 체중 지지 트레드밀 훈련(Body Weight Support Treadmill Training, BWSTT) 방식을 사용했다.
외골격 로봇을 활용한 보행 재활은 로봇의 보조를 받는 BWSTT와 몇 가지 차이점들이 있다. 첫째로, 외골격 로봇을 착용할 경우, 인체와 주위 환경 사이에 작용하는 힘은 오직 지면과 발 사이의 반발력뿐이고 이는 실제 보행 환경과 일치한다. 따라서 보행의 동역학적 특성을 최대한 반영시킬 수 있다는 장점이 있다. 이에 반해 BWSTT 방식은 지면 반발력 외에 고정된 구조물로부터 추가적인 지지를 받아 안정적이라는 장점이 있지만 한편으로는 이 때문에 일반적인 보행 동역학을 완전하게 반영하지 못하며, 환자 스스로 균형 유지에 대한 필요성을 느끼지 못해 균형 유지 능력을 회복하기 어렵다는 단점이 있다. 둘째로, 로봇의 보조를 받는 BWSTT 방식에서는 로봇에 경로 기반(Trajectory Based)의 제어 방식을 적용한다. 이에 따라 환자는 로봇이 생성하는 다리 움직임의 경로를 그대로 따라야 한다. 이에 반해 외골격 로봇을 활용한 기존 연구에서는 경로 기반이 아닌(Non-Trajectory Based) 보조 방식을 적용한다. 따라서 착용자가 보폭이나 발의 체공 시간 등을 조정하여 일정 정도 내에서 스스로 움직임을 결정할 수 있도록 한다.
8 이러한 보조 방식은 보행 훈련 시 착용자의 움직임 의도와 로봇이 생성하는 움직임의 차이에 의해 발생할 수 있는 움직임과 자세의 불안정함을 줄일 수 있다는 장점이 있다. 이에 더하여 환자의 자발적 움직임은 재활 치료 효과에 긍정적인 영향을 준다는 연구
9와 경로 기반이 아닌 보조 방식이 경로 기반의 보조 방식보다 재활에 있어서 더 우수한 효과를 보인다는 연구
10로부터 외골격 로봇을 활용한 보행 재활의 효과를 기대할 수 있다.
외골격 로봇이 경로 기반이 아닌 보조 방식을 통해 보행 재활을 돕는 역할을 수행하기 위해서는 착용자의 보행 의도를 파악하는 것이 중요하다. 보행에 대한 의도는 원하는 순간에 보행 단계(Gait Phase)를 전환하고자 하는 시간적인 요소와 원하는 정도의 변위 혹은 속도로 움직임을 구현하고자 하는 정략적인 요소를 포함한다. 외골격 로봇을 활용한 보행 재활에 대한 기존 연구는 로봇이 착용자 의도의 시간적 요소를 파악하여 착용자가 매 순간 보행 단계의 전환을 결정할 수 있도록 했다. 그러나 각 보행 단계에서 로봇이 환자의 움직임을 보조하기 위해 가하는 힘은 고정값으로 설정된 상수를 사용했기 때문에 보폭 또는 발의 체공 시간 등 움직임의 양적인 요소에 대한 환자의 의도를 충분히 반영하는 것에는 어려움이 존재할 수 있었다.
이 논문에서는 이를 개선할 수 있는 외골격 로봇의 제어 방안에 대하여 다룬다. 보행 중 팔의 움직임을 정량적으로 분석한 연구
11로부터 팔의 움직임과 보폭의 상관관계를 분석할 수 있다. 그리고 이것을 활용한다면 착용자의 팔 움직임을 통해 보폭에 대한 의도를 파악하고, 매 걸음마다 외골격 로봇의 동작을 그에 따라 적합하게 조정하는 제어 방식을 적용할 수 있다. 운동능력이 부족한 환자가 의도한 움직임을 외부에서 보조하는 과정을 통해 증세의 호전을 얻고자 하는 재활 훈련의 특성을 고려한다면, 보폭에 대한 의도를 추가적으로 파악하고 이에 적합한 보행 보조를 가함으로써 의도된 움직임을 더 정확하게 구현하거나 혹은 다양한 움직임 의도에 적합하게 보조를 받는 것이 가능하고 이로부터 재활의 효과를 기대할 수 있다. 이를 위해 이 연구에서는 편측 마비 보행의 재활 훈련을 위한 1자유도 고관절 외골격 로봇을 제작하고, 착용자의 의도 파악을 위한 센서를 구성하여 위의 제어 방식에 따른 로봇의 작동을 확인하기 위한 실험을 수행하였다.
2. 1자유도 고관절 외골격 로봇의 하드웨어 구성
2.1 구동부(Actuator)의 구성
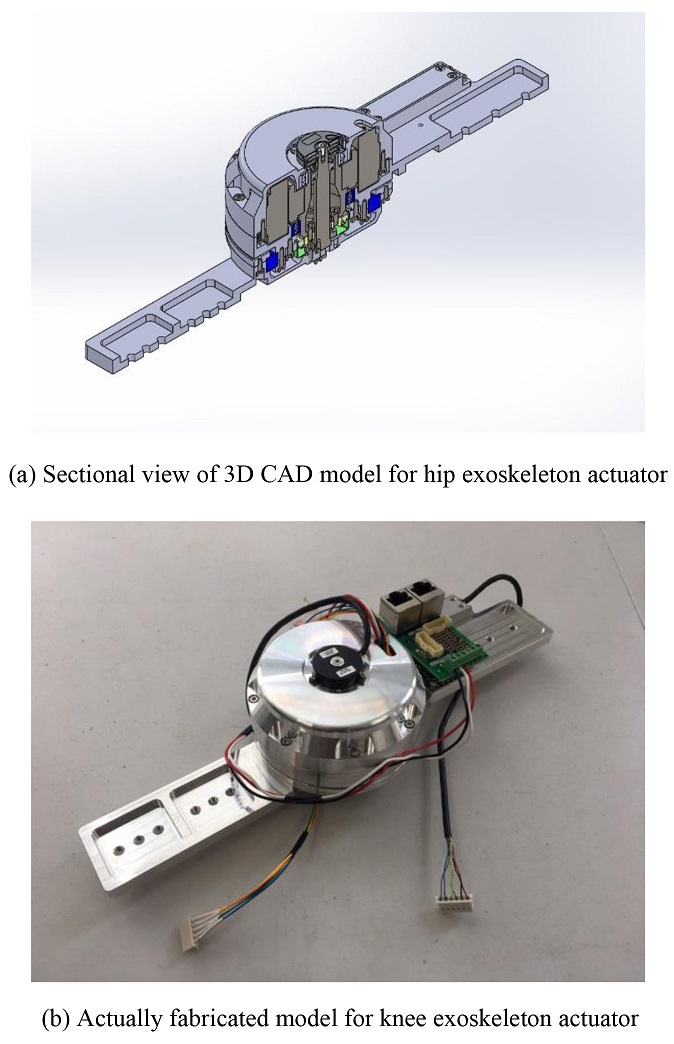
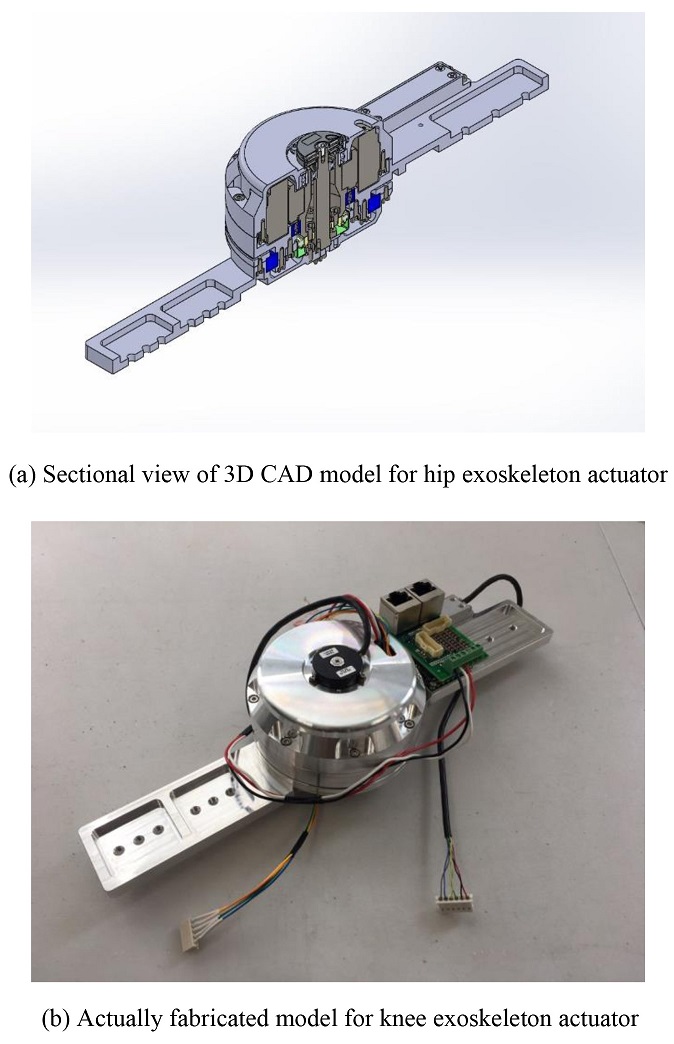
보행 시 다리의 주된 움직임은 인체의 시상면(Sagittal Plane)상에서 나타나며, 이는 고관절과 무릎 관절의 굴곡(Flexion)과 신전(Extension)으로 구성된다. 편측 마비 환자는 불완전한 고관절의 굴곡과 신전으로 인해 넓적다리가 보행에 필요한 움직임을 온전하게 나타내지 못하는 양상을 보인다. 따라서 이를 보조하기 위한 1자유도 구동부가 제작되었다. 프레임이 없는(Frameless) BLDC 모터가 이용되었고, 모터의 회전축이 시상면과 수직하게, 고관절의 회전축과 평행하게 위치할 수 있도록 설계되었다. 모터의 고정자와 회전자에 연결된 기구부는 각각 허리와 허벅지 착용부에 결속이 가능하도록 설계되었다. 모터는 출력축과 감속기를 통해 연결되며, 출력축에는 엔코더가 설치되어 구동부 및 고관절의 위치에 대한 피드백을 받도록 설계되었다. 구동부의 3D 설계안과 실제 제작된 형상은
Fig. 1과 같다.
Fig. 13D CAD model and actually fabricated model for hip exoskeleton actuator
2.2 착용부 및 구동부(Actuator) 결합부의 구성
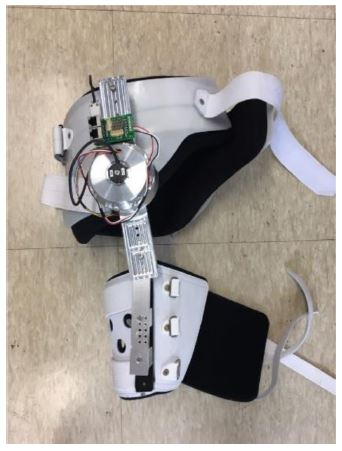
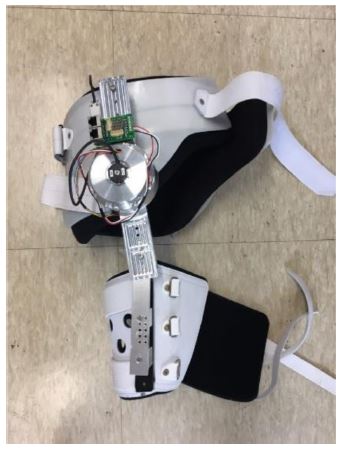
사람이 구동부를 실제 착용할 수 있도록 하기 위해 상용 고관절 보조기(Hip Brace)가 활용되었다. 구동부의 양 끝단은 각각 보조기의 허리와 허벅지 착용부에 결합되어 모터가 가하는 토크가 신체로 전달되도록 한다. 곡면의 형태를 가진 착용부 측면에 구동부를 연결하기 위한 결합부가 제작되었다. 이를 통해 구동부와 고관절의 회전축이 평행하게 위치할 수 있도록 하며 또한 착용자 개개인의 신체 특성에 따라 허리와 허벅지 착용부 사이의 거리를 조정할 수 있도록 하였다. 구동부와 착용부가 결합된 형상은
Fig. 2와 같다.
Fig. 2Hip exoskeleton actuator combined with hip braces
3. 보행에 대한 의도 파악을 위한 센서 시스템 구성
일련의 순서에 따라 반복되는 보행 단계의 변화를 인식하고 이로부터 착용자의 의도를 파악하기 위해 신발 센서가 제작되었다. 2개의 압력센서(Force Sensitive Resistor, FSR)가 양 신발 밑창의 앞부분과 뒷부분에 부착되어 보행 간 발의 지면 접촉 상태를 파악하게 된다. 압력센서의 측정값은 블루투스 통신을 통해 주 제어기로 전송된다. 보행 단계에 따른 발의 지면 접촉 상태는 뒤꿈치만 지면에 닿는 상태(Heel Strike), 이후 발바닥 전체가 지면에 닿는 상태(Foot Flat), 이어서 뒤꿈치가 지면에서 떨어져 발의 앞 부분만 닿아 있는 상태(Heel Off), 마지막으로 앞 부분이 떨어져 전체가 닿지 않는 상태(Toe Off)의 4가지로 나뉜다. 주 제어기에서는 좌우 발의 지면 접촉 상태를 조합하여 보행 단계를 인식하게 된다. 제작된 신발 센서는
Fig. 3과 같다.
Fig. 3 Shoe sensors including FSRs and Bluetooth module

팔의 움직임을 인식하고 이로부터 착용자의 보폭에 대한 의도 를 파악하기 위해서 무선 관성 측정 센서(Inertial Measurement Unit, IMU)를 포함한 팔 센서가 제작되었다. IMU는 시상면 위에서의 상박(Upper Arm)의 각도를 측정해 어깨 관절의 굴곡과 신전 정도를 파악한다. 보행 시 연동되는 팔과 다리는 서로 반대측(Contralateral)에 위치하기 때문에 팔 센서는 로봇이 착용된 다리의 반대편 팔에 착용된다.
4. 외골격 로봇의 제어
4.1 팔 움직임에 따른 보행 보조 토크의 결정
보행 시 팔의 움직임(Arm Swing)을 정량적으로 분석한 기존 연구에서는 팔의 운동에 영향을 주는 변수들(보행 속도, 지면 경사, 신장, 체중 등)에 따른 팔의 움직임을 분석하였다. 이에 따르면 시상면 상에서 어깨 관절의 회전은 사인곡선으로 근사하여 표현될 수 있고, 이를 표현하는 변수들(진폭, 주기, 위상 등)은 팔 운동에 영향을 주는 변수들에 대한 다항식으로 표현된다.
11
만약 동일한 사람이 평지를 걷는 상황을 가정한다면 어깨 회전의 진폭과 진동수는 보행 와 일차식의 관계를 보인다. 팔 움직임과 다리 움직임의 진동수 비는 1:1임을, 보행 속도는 다리 움직임의 진동수와 보폭의 곱임을 이용하면 보행 속도에 따른 보폭을 나타낼 수 있다. 그 결과 보폭은 분자 분모가 모두 속도에 대한 일차식인 분수식으로 표현되므로, 보행 시 어깨 회전 운동의 진폭과 보폭은 동시에 증가하거나 감소하는 관계임을 알 수 있다. 이를 이용한다면 어깨의 최대 굴곡 및 신전 각도로 부터 보폭에 대한 의도를 파악하는 것이 가능하고 이를 반영하여 다리 움직임을 보조하기 위해 로봇이 가하는 토크의 크기를 조정할 수 있다. 이 논문에서는 움직임 보조 토크의 크기를 어깨 회전의 최대 변위에 대한 일차식으로 단순화하여 결정한다.
4.2 제어 알고리즘
외골격 로봇의 전반적인 제어는 유한 상태 기계(Finite State Machine)를 통해 적용된다. 편측 마비 환자는 환측을 기준으로 다리가 앞으로 전진하는 보행 단계(Swing Period)에서는 고관절의 굴곡 능력이 부족하고, 반대편 다리가 앞으로 전진할 수 있도록 체중을 지지하는 보행 단계(Stance Period)에서는 고관절의 신전 능력이 부족하다.
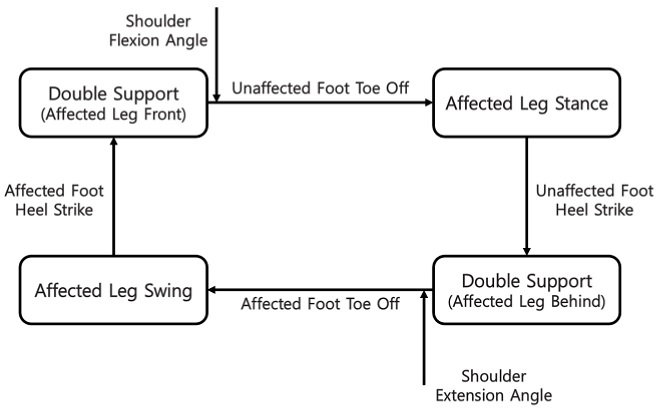
12,13 따라서 신발 센서로부터 파악한 보행 단계를 기준으로 로봇을 착용한 다리가 전진 상태인지 지지 상태인지 구분하고 각 상태에서 요구되는/적합한 고관절의 기능을 보조하도록 로봇의 작동을 설정하여 상태 기계를 구성한다. 팔의 움직임에 대한 정보는 로봇이 토크를 가하기 전에 그 크기를 결정하도록 활용된다. 유한 상태 기계의 전체 구성은
Fig. 4와 같다.
Fig. 4Finite state machine for 1DoF hip exoskeleton for rehabilitation
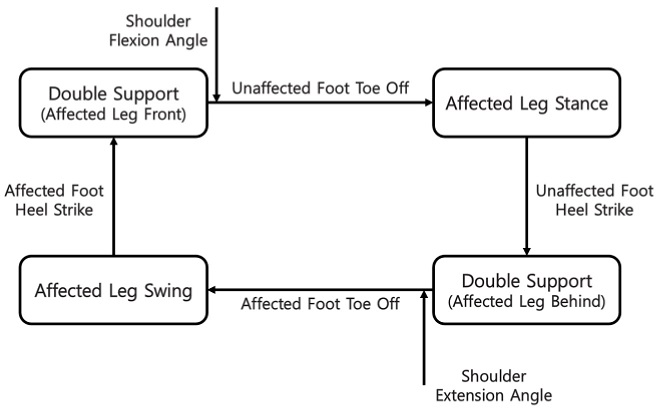
외골격 로봇은 기본적으로는 착용자의 보행 단계 변화에 따라 제어된다. 환측 다리가 앞에 놓인 두 발 지지 상태(Double Support – Affected Leg Front)에서 정상 측의 다리가 전진하기 위해 정상측 발이 Toe off 상태가 되면 환측 다리는 한 발 지지 상태(Affected Leg Stance)가 된다. 이 순간에 정상측 어깨는 최대 굴곡 상태에서 신전의 방향으로 움직임을 시작하는데, 이 때 팔 센서의 값으로부터 로봇이 가하는 토크의 크기를 결정하여 고관절 신전을 보강한다. 이어서 정상 측의 다리가 전진을 마치 고 정상측 발이 Heel Strike 상태가 되면 환측 다리가 뒤에 놓인 두 발 지지 상태(Double Support – Affected Leg Behind)가 된다. 이어서 환측 발이 Toe Off 상태로 전환됨에 따라 환측 다리 또한 전진하는 상태(Affected Leg Swing)로 전환된다. 이러한 상태 변화가 일어날 때 정상측 어깨는 최대 신전 상태에서 굴곡의 방향으로 움직임을 시작한다. 이 때의 팔 센서 값으로부터 마찬가지로 로봇이 가하는 토크의 크기를 결정하여 고관절 굴곡을 보조한다.
팔 움직임 정보로부터 크기가 정해진 보행 보조 토크 성분은 일정한 지속시간을 가진 반 주기 사인곡선의 형태로 가해진다.
8이 외에 로봇의 움직일 때 마찰력을 보상하는 토크가 가해지며, 로봇의 과도한 변위를 방지하는 각도 제한 토크 성분도 해당하는 경우에 따라 가해진다. 유한 상태 기계를 구성하는 각각의 상태에서 외골격 로봇은 이러한 토크 성분들의 총합을 가한다.
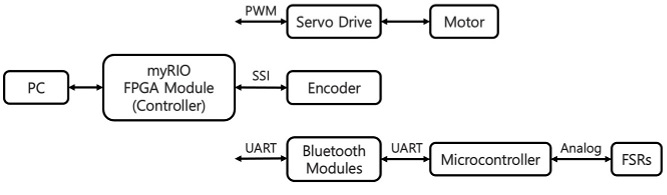
외골격 로봇의 전체적인 제어 시스템 구성은
Fig. 5와 같다. 주 제어기로는 National Instruments의 myRIO가 사용되었다. myRIO는 현장 프로그래머블 게이트 어레이(Field Programmable Gate Array, FPGA)를 통해 각 장치와의 통신을 병렬적으로 처리하며 1 ms의 제어 주기로 외골격 로봇을 제어한다.
Fig. 5Control system for 1DoF hip exoskeleton actuator

5. 실험 수행
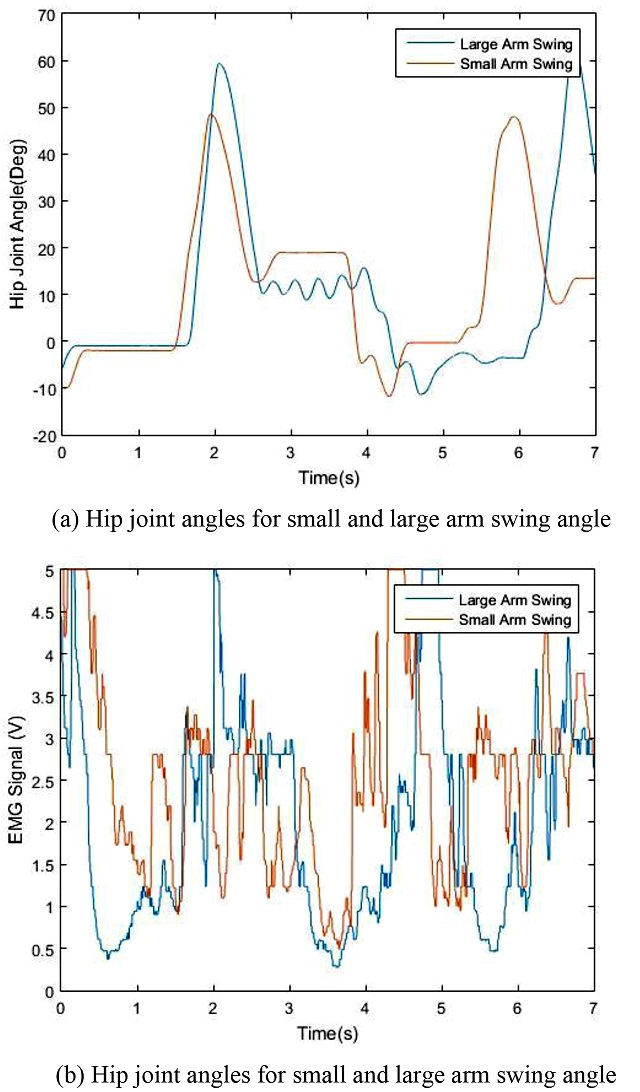
보행 시 외골격 로봇이 착용자의 팔 움직임의 크기로부터 보폭에 대한 의도를 파악하고 그에 따른 토크를 가하여 고관절의 움직임을 적절하게 보조할 수 있는지 여부를 확인하기 위한 실험을 수행하였다. 실험은 편측 마비 환자가 아닌 건강한 사람을 대상으로 하여 진행되었다. 본격적인 실험에 앞서 착용자가 작은 보폭으로 걸을 때와 큰 보폭으로 걸을 때의 팔의 움직임을 측정하고, 이를 바탕으로 토크를 결정하는 관계식의 계수를 조율하는 과정을 거쳤다. 본 실험에서는 외골격 로봇으로부터 팔의 움직임 정보를 반영한 보조를 받으며 걷는 상황에서 로봇의 엔코더를 이용해 측정한 고관절의 변위를 확인하였다. 로봇에는 경로 기반이 아닌 제어 방식을 적용하였기 때문에 건강한 피실험자의 경우에는 고관절의 변위에 실험 대상의 운동 능력이 과도하게 영향을 끼칠 수 있다. 고관절의 변위에 대한 피실험자의 능동적인 개입 정도를 확인하기 위해 근전도(EMG) 센서를 이용해 근전도 신호를 측정하였다. 근전도 신호는 다리의 전진 시고관절 굴곡에 관여하는 장내전근(Adductor Longus)을 대상 부위로 하여 측정하였다. 실험 결과는 아래
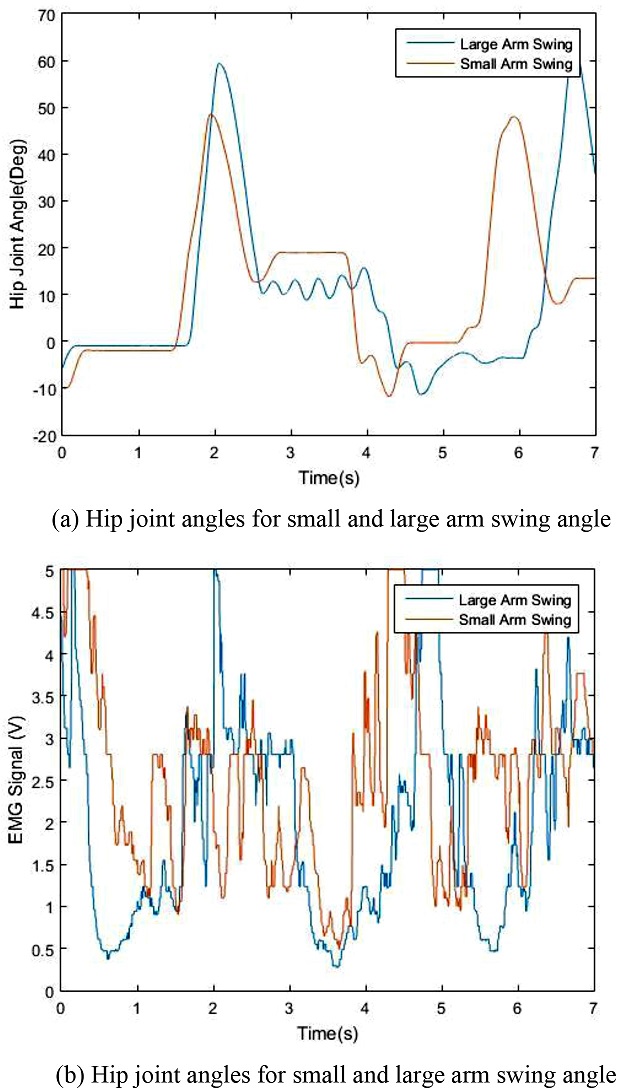
Fig. 5와 같다.
Fig. 5(a)는 서로 다른 팔의 움직임으로 각각 작은 보폭과 큰 보폭을 의도한 경우에 고관절의 변위를 측정하여 비교한 결과이다. 작은 보폭을 의도한 움직임의 경우 다리가 전진할 때 고관절의 굴곡이 최대 약 48도인 것을 확인할 수 있다. 이에 비해 큰 보폭을 의도한 움직임의 경우 고관절의 굴곡의 최대값이 약 60도로 고관절의 운동 범위가 더 큰 것을 확인할 수 있다.
Fig. 5(b)는 서로 다른 팔의 움직임으로 작은 보폭과 큰 보폭의 걸음을 의도한 경우에 측정한 근전도 신호를 비교한 결과이다. 이로부터 두 경우에 근전도 신호는 주목할 만한 큰 차이점을 확인할 수 없는 것을 볼 수 있다. 이로부터 외골격 로봇의 보조에 의한 보행 시 팔의 움직임 정보를 이용하여 보폭에 대한 의도를 반영하고 그에 따라 로봇을 적절하게 제어하는 것이 가능함을 확인할 수 있다.
Fig. 6 Experiment results for small and large arm swing angle
6. 결론
본 논문에서는 편측 마비 환자의 보행 재활 훈련에 적용하기 위한 1자유도 고관절 외골격 로봇의 제어 방법에 대해 서술하였다. 우선 보행 시 팔 운동에 대한 기존의 분석으로부터 어깨 관절의 변위와 보폭 사이의 정량적인 관계를 파악하였다. 그리고 이를 활용하여 팔의 움직임으로부터 착용자의 보폭에 대한 의도를 파악하고 그에 적절한 움직임 보조 토크를 가하도록 하는 외골격 로봇의 제어 방식에 대하여 제시하였다. IMU를 포함한 팔 센서를 이용하여 어깨 관절의 변위를 측정하고, 이를 일차 관계식을 통해 고관절 보조 토크의 크기로 변환하여 적용하였다. 로봇이 팔의 움직임으로부터 의도된 다리의 움직임을 구현하기 위하여 적합한 보조를 할 수 있는지 확인하기 위해 실험을 수행하였다. 실험을 통해 팔 센서의 값에서 크고 작은 보폭에 대한 의도를 파악하고, 그에 따라 보조 토크의 크기를 조절한 결과가 보행 시 고관절의 변위 차이로 나타남을 확인하였다. 보행 단계를 전환하고자 하는 의도에 따라 로봇을 제어하는 기존의 방식에서 더 나아가 보폭에 대한 의도를 추가적으로 반영하는 제어 방식을 적용함으로써, 재활 훈련에 적용 시 착용자가 의도한 걸음에 더욱 합치되는 보조를 가하여 재활의 효과를 향상시킬 수 있을 것으로 생각된다.
이 연구에서는 어깨 관절의 변위라는 입력과 로봇의 보조 토크의 크기라는 출력의 관계를 일차식으로 단순화하여 결정하였다. 그러나 실제 이들의 관계는 일차식이 아니기 때문에 관계식의 계수를 조정하더라도 모든 범위의 입력에 대해 필요한 출력을 정확하게 도출하여 적용하는 것은 어려울 수 있다. 어깨 관절의 변위와 보폭의 관계를 수식적으로 해석한 관계식을 직접적으로 이용하고, 로봇이 가하는 토크에 따른 다리의 움직임을 분석하는 연구를 추가적으로 수행함으로써 위의 어려움은 개선이 가능할 것으로 생각된다. 또한 걸음을 결정하는 요소로는 보폭 외에도 발의 체공 시간이 있으므로 이에 대한 의도를 파악하여 외골격 로봇의 제어에 활용하는 연구를 통해 외골격 로봇의 효과를 더욱 개선할 수 있을 것으로 생각된다.
다양한 목적으로 쓰임이 많은 팔의 특성 상 일상적인 걸음에서는 이것의 움직임을 이용해 걸음에 대한 의도를 파악하는 방식의 효용성이 부족할 수 있다. 그러나 재활 훈련이라는 특수한 상황을 고려한다면, 그리고 보행에 대한 추가적인 의도 파악을 적극적으로 활용함으로써 얻을 수 있는 재활 훈련의 효과를 고려한다면 적용해볼 수 있는 제어 방식이라고 생각된다.
ACKNOWLEDGMENTS
본 논문은 산업통상자원부 산업기술혁신사업의 지원을 받아 수행된 연구임(과제번호 : 10067184).
REFERENCES
- 1.
Sankai, Y., “Hal: Hybrid Assistive Limb Based on Cybernics,” Robotics Research, Vol. 66, pp. 25-34, 2010.
10.1007/978-3-642-14743-2_3
- 2.
Talaty, M., Esquenazi, A., and Briceno, J. E., “Differentiating Ability in Users of the RewalkTM Powered Exoskeleton: An Analysis of Walking Kinematics,” Proc. of Rehabilitation Robotics 13th International Conference, pp. 1-5, 2013.
10.1109/ICORR.2013.6650469
- 3.
Zoss, A. B., Kazerooni, H., and Chu, A., “Biomechanical Design of the Berkeley Lower Extremity Exoskeleton (BLEEX),” IEEE/ASME Transactions on Mechatronics, Vol. 11, No. 2, pp. 128-138, 2006.
10.1109/TMECH.2006.871087
- 4.
Zhang, X. and Hashimoto, M., “Synchronization Based Control for Walking Assist Suit-Evaluation on Synchronization and Assist Effect,” Key Engineering Materials, Vol. 464, pp. 115-118, 2011.
10.4028/www.scientific.net/KEM.464.115
- 5.
Kong, K. and Jeon, D., “Design and Control of an Exoskeleton for the Elderly and Patients,” IEEE/ASME Transactions on Mechatronics, Vol. 11, No. 4, pp. 428-432, 2006.
10.1109/TMECH.2006.878550
- 6.
Aphiratsakun, N. and Parnichkun, M., “Balancing Control of AIT Leg Exoskeleton Using ZMP Based FLC,” International Journal of Advanced Robotic Systems, Vol. 6, No. 4, p. 34, 2009.
10.5772/7250
- 7.
Yan, T., Cempini, M., Oddo, C. M., and Vitiello, N., “Review of Assistive Strategies in Powered Lower-Limb Orthoses and Exoskeletons,” Robotics and Autonomous Systems, Vol. 64, pp. 120-136, 2015.
10.1016/j.robot.2014.09.032
- 8.
Murray, S. A., Ha, K. H., Hartigan, C., and Goldfarb, M., “An Assistive Control Approach for a Lower-Limb Exoskeleton to Facilitate Recovery of Walking Following Stroke,” IEEE Transactions on Neural Systems and Rehabilitation Engineering, Vol. 23, No. 3, pp. 441-449, 2015.
- 9.
Kaelin-Lang, A., Sawaki, L., and Cohen, L. G., “Role of Voluntary Drive in Encoding an Elementary Motor Memory,” Journal of Neurophysiology, Vol.93, No.2, pp.1099-1103, 2005.
10.1152/jn.00143.2004
- 10.
Murray, S. A., “Development and Assessment of a Control Approach for a Lower-Limb Exoskeleton for Use in Gait Rehabilitation Post Stroke,” Vanderbilt University, 2016.
- 11.
Hejrati, B., Chesebrough, S., Foreman, K. B., Abbott, J. J., and Merryweather, A. S., “Comprehensive Quantitative Investigation of Arm Swing During Walking at Various Speed and Surface Slope Conditions,” Human Movement Science, Vol. 49, pp. 104-115, 2016.
10.1016/j.humov.2016.06.001
- 12.
Moore, S., Schurr, K., Wales, A., Moseley, A., and Herbert, R., “Observation and Analysis of Hemiplegic Gait: Swing Phase,” Australian Journal of Physiotherapy, Vol. 39, No. 4, pp. 271-278, 1993.
10.1016/S0004-9514(14)60487-6
- 13.
Moseley, A., Wales, A., Herbert, R., Schurr, K., and Moore, S., “Observation and Analysis of Hemiplegic Gait: Stance Phase,” Australian Journal of Physiotherapy, Vol. 39, No. 4, pp. 259-267, 1993.
10.1016/S0004-9514(14)60486-4
- 14.
Kirtley, C., Whittle, M. W., and Jefferson, R., “Influence of Walking Speed on Gait Parameters,” Journal of Biomedical Engineering, Vol. 7, No. 4, pp. 282-288, 1985.
10.1016/0141-5425(85)90055-X
Biography
- Wooseok Seo
M.Sc. in the Department of Mechanical Engineering, Korea University. His research interest is Exoskeleton.
- Joon Ho Kwon
Ph.D. candidate in the Department of Mechanical Engineering, Korea University. His research interest is System Engineering.
- Yeonho Ko
Ph.D. candidate in the Department of Mechanical Engineering, Korea University. His research interest is Mechanical Design.
- Daehie Hong
Professor in the Department of Mechanical Engineering, Korea University. His research interest is Mechatronics.
Citations
Citations to this article as recorded by

- Development of an Actuator and Controller for Robotic Joints Integrating a Frameless BLDC Motor and a Stepped Planetary Gear Reducer
Sangsin Park
Journal of the Korean Society for Precision Engineering.2026; 43(2): 183. CrossRef - Measurement, Evaluation, and Control of Active Intelligent Gait Training Systems—Analysis of the Current State of the Art
Yi Han, Chenhao Liu, Bin Zhang, Ning Zhang, Shuoyu Wang, Meimei Han, João P. Ferreira, Tao Liu, Xiufeng Zhang
Electronics.2022; 11(10): 1633. CrossRef