ABSTRACT
The process of tattooing to mark the position of lesions in the colon is one of important functions of the conventional endoscope. However, commercial capsule endoscope (CE) devices cannot perform the tattooing procedure because they cannot accommodate the size of the tattooing device. In this paper, we propose a compact tattooing mechanism design which can be accommodated inside the CE. Two conical springs, two triggering modules and a needle that can be installed inside a volume of 840 mm3 are employed to perform the needle insertion/withdrawal and inject the ink. A triggering module to deploy the conical springs is designed to be activated by heating a Ni-Cr wire and melting Wood’s metal. In this study, the activation time of the triggering module is investigated based on a Wood’s metal heating simulation. In order to determine the proper conical springs to ensure the activation of the tattooing mechanism, the elastic force correlation between two conical springs is studied. Then, the components of the proposed tattooing mechanism are fabricated and assembled, and an ex-vivo test is performed. Conclusively, the proposed tattooing mechanism implements the correct needle stroke and the proper ink injection into the submucosal layer of a porcine colon.
-
KEYWORDS: Capsule endoscope, Tattooing mechanism, Wood’s metal, Space efficiency
-
KEYWORDS: 캡슐 내시경, 문신술 메커니즘, 우드 메탈, 공간 효율성
NOMENCLATURE
The diameter of the smallest active coil
The diameter of the largest active coil
Total number of active coils
Shear modulus of elasticity
Free length of the conical spring
Solid length of the active coils
The function of the load according to length with constant pitch
1. 서론
2007년 1세대 캡슐 내시경이 도입된 이래로 캡슐 내시경과 관련된 구조, 소프트웨어, 통신 기능 등 다양한 분야에 대한 지속적인 연구가 이어지고 있으며, 최근 3세대 캡슐 내시경이 개발되었다.
1 캡슐 내시경의 연구가 지속됨에 따라 다양한 진단 및 치료 기능을 탑재함으로써 기존의 내시경을 대체할 수 있는 잠재력을 보여주고 있다. 기존의 내시경의 기능 중 하나인 내시경적 문신술(Endoscopic Tattooing)은 내시경 시술 중 병변으로 의심되는 특정 위치를 수동으로 표식하는 과정으로, 표식 후 인근 표피 조직을 생검한다. 이후 전문의는 종양이 악성인지 여부에 따라 이를 제거하기 위해 최소 침습 수술(예: 복강경 수술, 로봇 수술)을 수행한다.
2-4 사전에 진행된 내시경적 문신술은 시야확보가 어려운 최소 침습 수술 시 수술자가 정확한 처치 부위를 확인할 수 있도록 한다. 대장 병변의 위치를 표시하기 위해 문신술 외에도 클립을 사용하는 방법이 제안되기도 하였다.
5-8 그러나 시술 위치에서 클립이 이탈할 수 있는 단점이 있기 때문에, 내시경 문신술은 여전히 선호되는 표식방법으로 알려져 있다.
그러나 기존 내시경 시술에 활용되는 내시경 문신술의 경우, 체외에서 문신술 잉크를 주입하는 방법을 사용하기 때문에 캡슐 내시경 탑재에 적합하지 않다. 특히 캡슐 내시경은 사람이 삼킬 수 있는 형태로 제작되었기 때문에 캡슐 내 매우 작은 공간에 탑재가 가능한 메커니즘의 개발이 필수적이다.
9
본 연구진은 이전 연구에서 이 문제를 해결하기 위해 원추스프링(Conical Spring)과 미끄럼 링크기구(Sliding Linkage)로 구성된 문신술 메커니즘(Tattooing Mechanism)을 제안한 바 있다.
10 그러나 기존에 제안된 메커니즘에는 바늘이 캡슐 내시경의 측면으로 이동한다는 단점이 있었다. 이로 인해 카메라를 사용하여 소화기 내벽을 확인하는 캡슐 내시경의 특성 상 문신술 과정 동안 정확하게 표적을 확인하는 것이 어려웠다. 따라서 본 논문에서 제안된 문신술 메커니즘은 이를 해결하기 위해 캡슐 내시경의 전면으로 바늘을 이동시킴으로써 문신술을 시행하는 동안 조작자가 카메라를 통해 질병이 있는 장 조직의 위치를 관찰할 수 있도록 설계되었다.
제안된 캡슐 내시경용 문신술 메커니즘의 두 가지 중요한 설계 기준은 다음과 같다. 첫번째, 캡슐 내시경에 탑재될 수 있도록 소형화가 가능한 메커니즘이어야 한다. 두번째, 캡슐 내시경의 전면, 즉 장치의 종방향으로 바늘을 이동시켜 용액을 주입해야 한다. 이를 반영하여 공간 효율성을 극대화할 수 있는 원추스프링을 사용하였으며, 이와 함께 우드 메탈(Wood’s Metal)을 사용한 트리거 모듈(Triggering Module)로 구성된 문신술 메커니즘을 제안하였다. 캡슐 내시경이 표적위치에 도달하였을 때, 전력을 인가하여 원추스프링을 전개시킴으로써 문신술용 바늘을 전면으로 이동시켜 문신술 과정을 수행한다.
2. 캡슐 내시경용 문신술 메커니즘 설계
캡슐 내시경용 문신술 메커니즘을 설계하기 위해 다음과 같은 요구조건을 수립하였다.
(1) 문신술 메커니즘은 바늘을 삽입하고 회수하는 기능을 수행해야 하며, 바늘 삽입 시 용액을 주입해야 한다.
(2) 잉크 주입량은 0.25 ml으로 제한된다.
(3) 문신술 모듈의 총 부피는 840 mm3로 제한된다.
(4) 기존 내시경적 문신술과 마찬가지로 26 G 규격의 바늘을 사용한다.
(5) 장 내벽 삽입 각도는 45°이다.
(6) 삽입 깊이는 장의 점막하층(Submucosal Layer) 평균 깊이인 2 mm로 제한한다.
2.1 개념 설계
제안된 캡슐 내시경용 문신술 메커니즘의 구성은
Fig. 1과 같다. 문신술 메커니즘은 바늘을 점막하층에 삽입함과 동시에 잉크를 주입하도록 설계되었다. 또한 작동을 마친 뒤에는 별도의 신호를 이용하여 바늘을 회수하도록 설계되었다. 바늘을 이동시키기 위해 공간효율이 우수한 원추스프링을 사용하였으며, 트리거 모듈은 너트 형태의 우드 메탈, 원추스프링 홀더(Conical Spring Holder), 니크롬 와이어(Ni-Cr Wire)로 구성된다. 전력을 인가할 경우, 니크롬 와이어의 주울 열(Joule Heating)에 의해우드 메탈이 용해된다. 우드 메탈은 저융점 금속의 한 종류로 열전도율이 높고 융점이 낮기 때문에 최소한의 열을 사용하여 물질 상태를 용이하게 바꿀 수 있다.
11 캡슐 하우징(Capsule Housing)의 기밀을 유지하기 위해서 RTV 실리콘(LOCTITE®, 40447)을 모든 연결부에 도포한다. 또한 바늘의 삽입과 동시에 잉크를 주입하기 위해 두께 0.5 mm의 실리콘 패드를 각 스프링홀더 표면에 부착한다. 결과적으로 제안된 문신술 메커니즘의 기구 장치는 캡슐 내시경 전체 체적의 7.95% 수준으로 공간효율성을 높이게 된다.
Fig. 1Tattooing mechanism configuration: (a) Capsule endoscope, (b) Tattooing module, (c) Camera, (d) Conical spring #1, (e) Housing, (f) Conical spring holder #2, (g) Needle, (h) Dummy needle, (i) Triggering module #2, (j) Conical spring #2, (k) Silicon pad, (l) Conical spring holder #1, (m) Triggering module #1
2.2 작동원리
제안된 문신술 메커니즘은
Fig. 2와 같이 트리거 모듈 #1에 탑재된 원추스프링 #1의 구속을 해제함으로써 작동을 시작한다. 이때 캡슐 내시경은 외부자기장에 의해 자세제어가 가능하다는 전제 하에 문신술 수행이 가능하며, 공간 효율성을 최대한 확보함으로써 자세를 제어하기 위한 영구자석 탑재 공간이 사전에 고려되었다. 세부적인 작동원리는 다음과 같다.
Fig. 2Working principle according to each step
(1) 두 개의 원추스프링은 각각의 트리거 모듈 내에 완전히 압축된 상태로 설치되며, 전력 인가 전까지 원추스프링 홀더와 우드 메탈에 의해 구속된다. 바늘은 장기 내벽의 손상과 천공을 방지하기 위해 작동 전까지 하우징 내에 위치한다.
(2) 전력을 인가하여 트리거 모듈 #1이 작동될 경우, 우드 메탈이 용해되며 구속되어 있던 원추스프링 #1의 전개가 시작된다. 이때 최대 3.3 mm 깊이로 바늘을 삽입한다. 동시에 문신술용 잉크가 바늘을 통해 주입된다.
(3) 잉크 주입 후 별도의 전력인가를 통해 트리거 모듈 #2의 작동이 시작되며, 원추스프링 #2의 전개를 통해 바늘을 원래 위치로 완전히 회수한다.
2.3 트리거 메커니즘 설계
캡슐 내시경의 부피를 고려하여 제안된 문신술 메커니즘은 이에 최적화된 트리거 메커니즘(Triggering Mechanism)이 필수적이다. 이때 트리거 메커니즘은 구조와 작동 원리를 간소화하여 신뢰성을 확보하여야 한다. 이를 위해 니크롬 와이어, 원추스프링, 원추스프링 홀더 및 우드 메탈(Asahi Metal Group KENIS, 110-982 Low Melting Metal)을 사용하였으며 구성은
Fig. 3과 같다. 니크롬 와이어(NILACO CORPORATION, Diameter = 0.3mm)가 원추스프링 홀더 주위를 감싸고 있으며, 이와 너트 형태의 우드 메탈 사이에 위치한다. 우드 메탈은 원추스프링 홀더의 볼트 구조와 결합하여 원추스프링을 안전하게 구속한다. 전력인가에 의해 니크롬 와이어가 가열되면 우드 메탈이 녹기 시작하고, 압축되어 있던 원추스프링의 전개가 시작된다. 결과적으로 제안된 트리거 메커니즘의 구성요소를 최소화하여 작동신뢰성을 향상시켰으며, 전력소모를 최소화하기 위해 우드 메탈(Melting Point = 72.3°C)을 사용하도록 설계되었다.
Fig. 3A new triggering mechanism configuration
2.4 트리거 모듈 설계 및 전산모사 검증
캡슐 내시경에 사용되는 장치는 본체에 탑재된 소형 배터리를 사용하여 구동되어야 하므로 작동시간과 소모전력에 대한 분석은 설계에 있어 주요한 요소이다. 따라서, 제안된 트리거 메커니즘의 소모전력 관점의 타당성을 검증하기 위해 상용 시뮬레이션 코드(COMSOL Multiphysics®)를 사용하여 작동 시간에 대한 전산모사해석을 수행하였다. 입력전원은 12.5W로 설정하고 니크롬 와이어의 양끝단에 인가되었다.
12 이때 입력전원은 시간(Msec)의 함수로 설정되었다. 전원이 인가된 후에 우드 메탈이 용융점에 도달할 경우, 트리거 모듈이 작동할 것으로 예상된다. 주입 유체가 원추스프링 홀더 바로 아래에 위치하기 때문에 원추스프링의 초기 온도는 20°C로 설정하였다. 캡슐 내시경의 부피를 고려하였을 때, 우드 메탈의 부피는 24 mm
3로 제한되며, 본 시뮬레이션의 경계 조건은
Table 1과 같다. 전산모사해석 결과, 우드 메탈은 1.5초 내에 용융점인 72.3°C에 도달하는 것을 확인하였다(
Fig. 4). 이때 용융점에 도달한 우드 메탈이 완전히 액화되기 위해서는 추가적인 에너지가 필요하다. 우드 메탈의 비잠열 값(Specific Latent Heat = 17.2 BTU/lbs)을 사용하여 이를 계산할 경우, 동일한 전원이 인가된 상태에서 상변화에 필요한 시간은 1.68 sec로 계산된다. 결과적으로 트리거 모듈의 작동에 소모되는 이론적 시간은 총 3.18 sec로 도출되었다.
Table 1Input conditions of the numerical simulation for the triggering mechanism
Table 1
|
Conditions |
Numerical simulation |
|
Heat source |
Ni-Cr wire |
|
Input voltage [V] |
2.5 |
|
Input ampere [A] |
5 |
|
Input power [W] |
12.5 |
|
Heat flux |
External natural convection |
|
Atmosphere [atm] |
1 |
|
Conical spring holder temperature [°C] |
20 |
Fig. 4Simulation results of a triggering module at 0.5 sec intervals
2.5 원추스프링 설계
캡슐 내시경의 제한된 크기로 인해 문신술 장치의 부피가 제한되기 때문에, 모터나 기어 트레인 같은 종래의 동력기구를 그대로 적용하는 것은 불가능하다. 따라서 공간 효율성이 우수한 원추스프링을 사용하였다. 문신술 장치를 정상적으로 작동시킨 뒤, 바늘을 회수하기 위해서는 원추스프링 #2가 원추스프링 #1을 완전히 압축시킬 수 있어야 한다. 즉, 완전히 전개된 원추스프링 #2의 탄성력(
F2)이 완전히 압축된 원추스프링 #1의 탄성력(
F1)보다 커야 한다. 이러한 기준에 기초하여 각각의 원추스프링은
식(1)에 따라 설계되고, 두 원추스프링 설계에 사용된 매개변수는
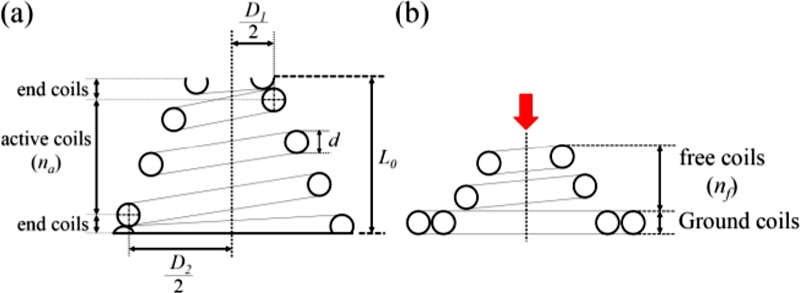
Fig. 5와 같고 설계에 사용된 값은
Table 2와 같다.
13
Fig. 5Parameters of conical spring. (a) Free state without compression, (b) Compressed spring at transient point13
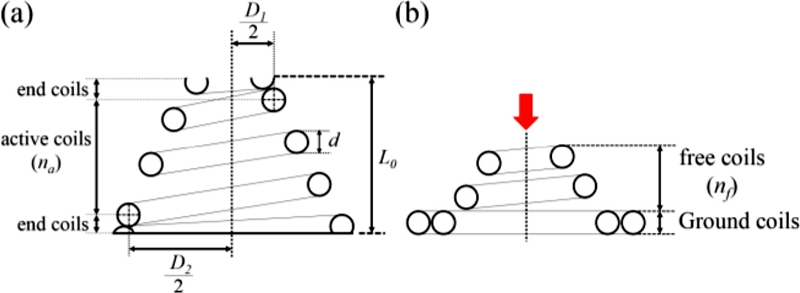
Table 2Conical spring parameters
Table 2
|
Nomenclature |
Conical spring #1 |
Conical spring #2 |
|
D1 [mm] |
3 |
4 |
|
D2 [mm] |
8 |
8 |
|
n
|
5 |
5 |
|
na
|
1.2 |
1.5 |
|
nf
|
0.498 |
1.487 |
|
d [mm] |
0.4 |
0.6 |
|
G [GPa] |
72 |
72 |
|
Lo [mm] |
10 |
10 |
|
La [mm] |
9.52 |
9.1 |
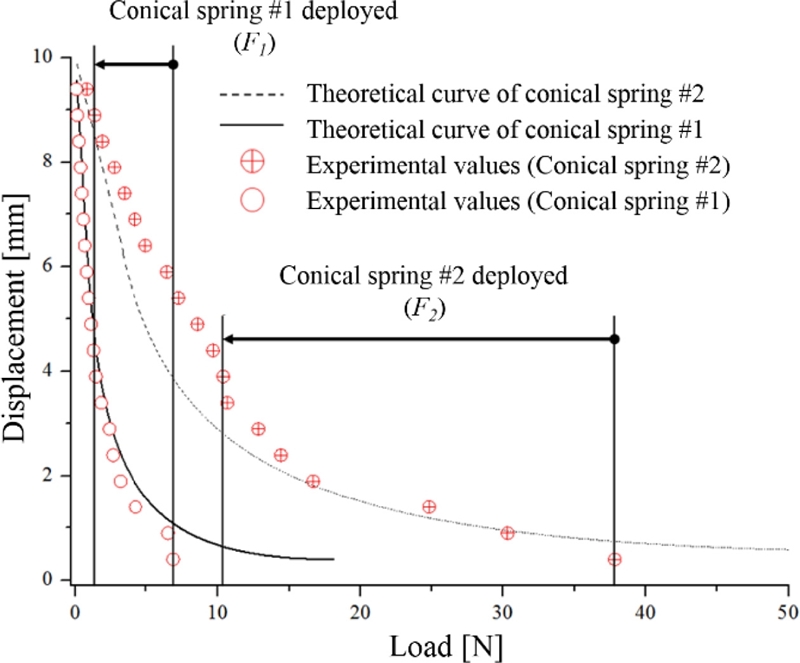
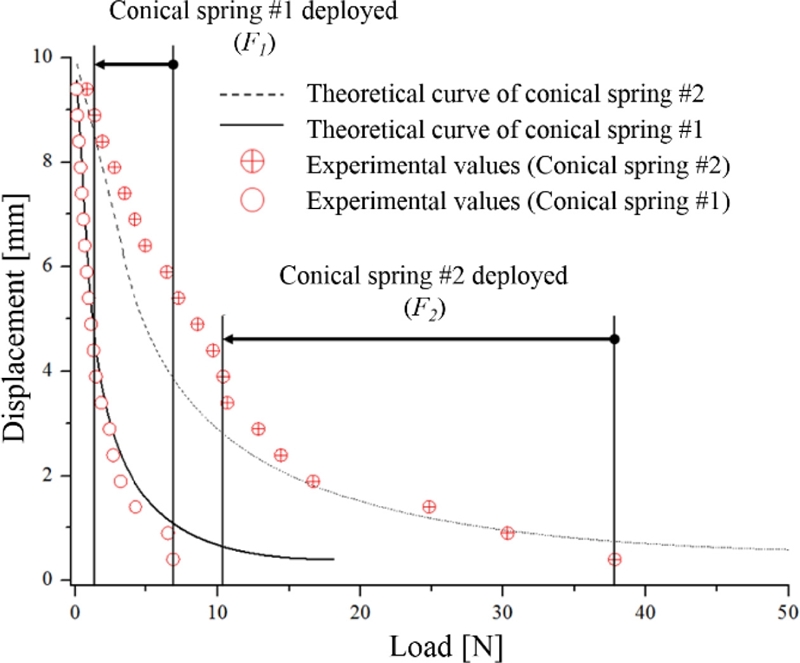
이를 바탕으로 하중에 따른 원추스프링의 변위를 계산하였다. 일반적인 압축스프링과 달리 전이점(Transient Point)을 기준으로 비선형구간이 나타나는 원추스프링의 특성 상 이론값과 측정값 사이의 오차가 필연적으로 발생한다. 따라서
Table 2의 설계 변수를 바탕으로 제작된 원추스프링의 탄성력 측정값을 이론값과 함께
Fig. 6에 나타내었다. 결과적으로 원추스프링 #2가 완전히 전개된 상태에서의
F2 (10.40 N)가 원추스프링 #1이 압축된 상태에서의
F1 (6.88 N)보다 크도록 제작된 것을 확인하였다. 따라서 두 원추스프링을 사용하여 제안된 문신술 메커니즘구현이 가능할 것으로 판단된다.
Fig. 6Theoretical and experimental analysis for two conical springs
3. 문신술 메커니즘 실험결과
캡슐 내시경용 문신술 메커니즘의 타당성을 검증하기위해
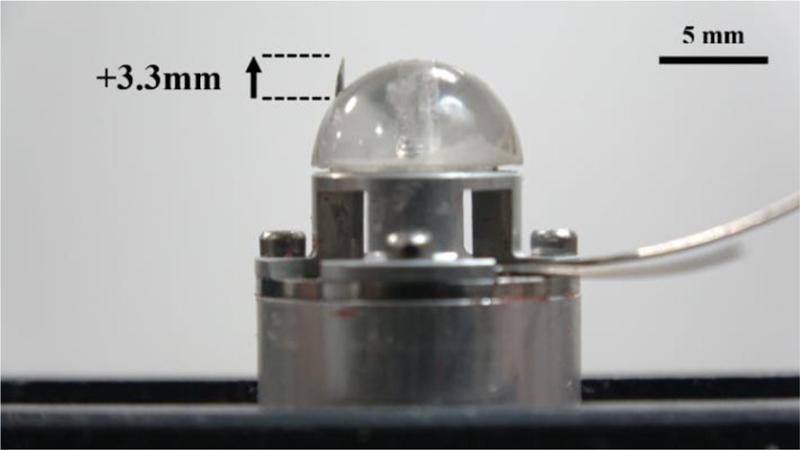
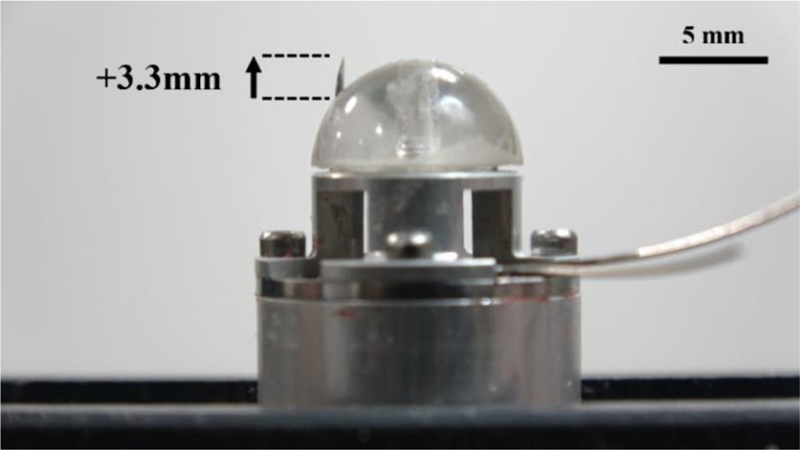
Fig. 7과 같이 작동 실험을 수행하였다. 니크롬 와이어는 우드메탈 내측에 조립되었고, 전원을 인가하기 위한 전선과 연결되었다. 전산모사해석 입력조건과 마찬가지로 전원은 12.5W를 인가하였다. 실험 결과, 트리거 모듈 #1은 3.2초 내에 바늘이 캡슐 내시경 전면으로 이동하는 것을 확인하였다. 기존 설계대로 바늘의 변위는 3.3 mm로 확인되었으며, 이는 삽입 각도(4 5°)를 고려하였을 때 표적 위치인 점막하층에 적합한 변위이다.
Fig. 7 Tattooing mechanism displacement experiment to show the needle insertion according to conical spring #1 deployment
바늘이 완전히 이동한 후에 이를 회수하기 위해 트리거 모듈 #2의 니크롬 와이어에 12.5W를 인가하였다. 우드 메탈이 용융됨에 따라 원추스프링 #2가 전개되고 바늘은 3.2초 이내에 3.3 mm를 이동하여 초기 위치로 회수되었다. 또한 이론적인 트리거 모듈 작동 시간에 대한 계산값과 실험값을 비교하였을 때, 오차율은 1% 이내로 확인되어 설계의 타당성을 확인할 수 있었다.
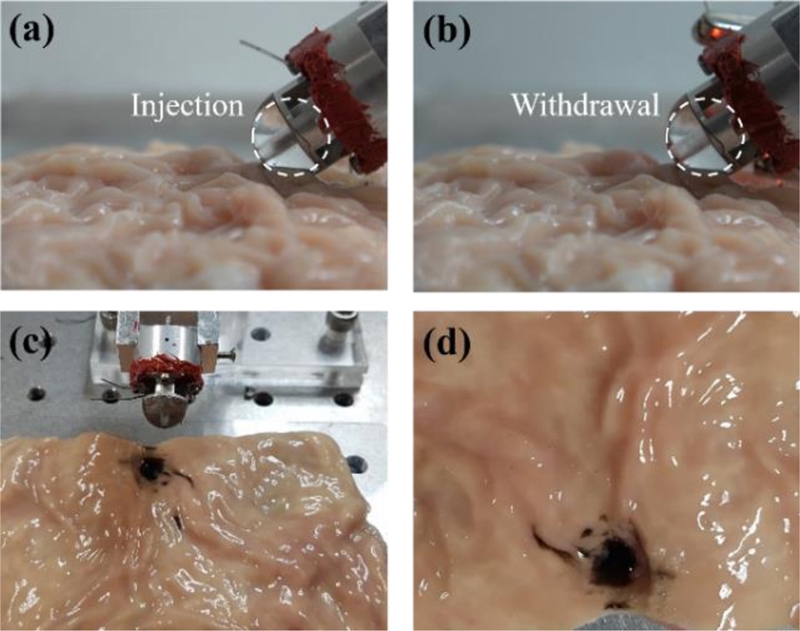
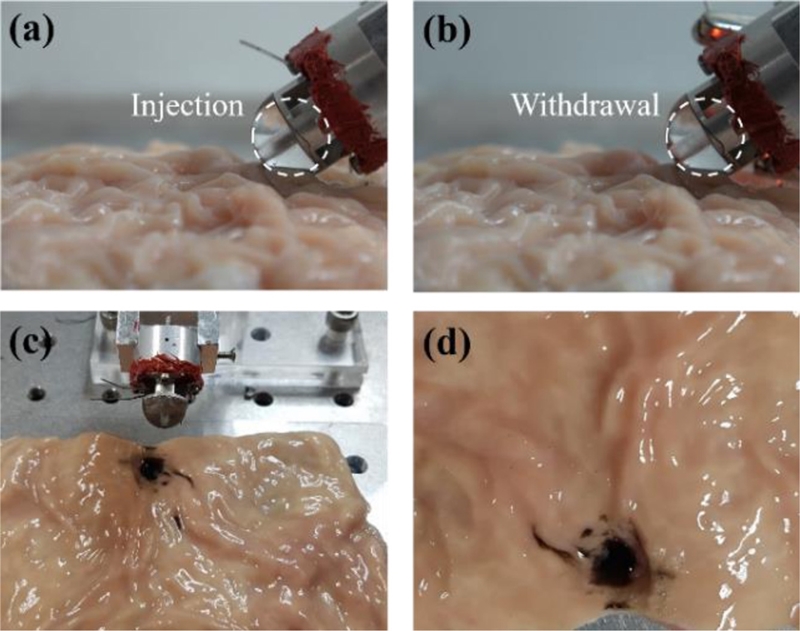
마지막으로 실제 대장에서의 문신술 메커니즘의 타당성을 검증하기 위해 적출된 돼지 대장을 이용한 실험을 수행하였다. 적출 후 12시간 내의 돼지 대장 100 cm
2을 실험을 위한 샘플로 준비하였으며, 실제 내시경적 문신술에 사용되는 인디아 잉크(India Ink, Dilution Ratio = 1 : 10)를 문신술 장치에 적재시켰다.
14 Fig. 8과 같이 0.25 ml의 잉크를 돼지 대장의 점막하층에 주사하여 잉크가 정상적으로 주입되는 것을 확인하였다.
Fig. 8 Ex-vivo tattooing mechanism test results using india ink. (a) The india ink injection, (b) Withdrawal of the needle, (c) Front view of the tattooing module after the injection, (d) Injected india ink in the porcine colon
4. 결론
본 논문에서는 일반적인 캡슐 내시경에 탑재될 수 있도록 소형화된 캡슐 내시경용 문신술 메커니즘을 제안하였다. 문신술메커니즘은 공간 효율성을 극대화시키기 위해 서로 마주하는 두 개의 원추스프링과 이를 작동시키기 위한 동일한 구조의 2개의 트리거 메커니즘으로 구성하였다. 결과적으로 제안된 문신술 메커니즘은 캡슐 내시경 전체 부피의 7.95%라는 우수한 공간 효율성을 나타내었다. 트리거 메커니즘을 제작하기 전에 배치공간을 고려하여 설계된 트리거 모듈에 대해 전산모사기법을 이용하여 전력인가에 따른 온도변화와 이를 통한 작동 시간을 조사하였고, 원추스프링의 사양을 결정하기위해 이론적인 탄성력을 계산하고, 실제로 제작된 원추스프링의 탄성력을 측정하여 설계의 타당성을 검증하였다. 상기 개념 설계와 전산모사 및 이론해석 결과를 바탕으로 문신술 장치를 제작하고 요구된 바늘의 변위가 정상적으로 구현되는 것을 확인하였다. 실험을 마친 문신술 장치에 인디아 잉크를 적재시키고, 적출된 돼지 대장을 이용하여 메커니즘의 작동 실험을 수행하였다. 결론적으로 제안된 문신술 메커니즘이 생체 외 조건 하에서 돼지 대장의 점막하층에 성공적으로 인디아 잉크를 주입하는 것을 확인할 수 있었다. 제안된 문신술 메커니즘을 실제 캡슐 내시경에 통합시기키 위해서는 추가적인 연구를 통해 동물실험을 수행하여 생체 적합성에 대한 검증이 필수적이다. 또한 캡슐 내시경용 문신술 메커니즘의 반복적인 실험을 통해 작동 신뢰성을 향상시키고자 한다.
ACKNOWLEDGMENTS
이 논문은 2015년도 정부(과기정통부)의 재원으로 한국연구재단 바이오·의료기술개발사업의 지원을 받아 수행된 연구임(No. 2015M3D5A1065682).
REFERENCES
- 1.
Spada, C., Riccioni, M. E., Petruzziello, L., Marchese, M., Urgesi, R., et al., “The New PillCam Colon Capsule: Difficult Colonoscopy? No Longer a Problem?” Gastrointestinal Endoscopy, Vol. 68, No. 4, pp. 807-808, 2008.
10.1016/j.gie.2008.01.030
- 2.
Lennon, A. M., Newman, N., Markary, M. A., Edil, B. H., Shin, E. J., et al., “EUS-Guided Tattooing Before Laparoscopic Distal Pancreatic Resection (with Video),” Gastrointestinal Endoscopy, Vol. 72, No. 5, pp. 1089-1094, 2010.
10.1016/j.gie.2010.07.023
- 3.
Hwang, D. Y., Moon, D. H., Choi, S. W., and Won, J. S., “Bending Mechanism Analysis and Bending Coupler Optimal Design for Laparoscopic Surgical Instrument,” Journal of the Korean Society for Precision Engineering, Vol. 30, No. 4, pp. 434-441, 2013.
10.7736/KSPE.2013.30.4.434
- 4.
Moon, Y. J. and Choi, J. S., “Characteristics of Needle Insertion Performance of Automated Biopsy Device for Robotic Needle Insertion Type Intervention: Insertion Depth and Accuracy,” Journal of the Korean Society for Precision Engineering, Vol. 33, No. 7, pp. 565-570, 2016.
10.7736/KSPE.2016.33.7.565
- 5.
Aldecoa, I., Montironi, C., Planell, N., Pellise, M., Fernandez-Esparrach, G., et al., “Endoscopic Tattooing of Early Colon Carcinoma Enhances Detection of Lymph Nodes Most Prone to Harbor Tumor Burden,” Surgical Endoscopy, Vol. 31, No. 2, pp. 723-733, 2017.
10.1007/s00464-016-5026-3
- 6.
Cai, Z., Pan, R., Ma, J., and Zheng, M., “Tumor Localization for Laparoscopic Colorectal Resection without Endoscopic Tattooing,” Surgical Laparoscopy Endoscopy & Percutaneous Techniques, Vol. 26, No. 3, pp. 230-235, 2016.
10.1097/SLE.0000000000000257
- 7.
Kim, K. G., Kim, J. K., Nam, K. W., Kim, H. H., and Sohn, D. K., “A Novel Endoscopic Fluorescent Clip for the Localization of Gastrointestinal Tumors,” Surgical Endoscopy, Vol. 25, No. 7, pp. 2372-2377, 2011.
10.1007/s00464-010-1557-1
- 8.
Wada, Y., Miyoshi, N., Ohue, M., Yasui, M., Fujino, S., et al., “Endoscopic Marking Clip with an IC Tag and Receiving Antenna to Detect Localization During Laparoscopic Surgery,” Surgical Endoscopy, Vol. 31, No. 7, pp. 3056-3060, 2017.
10.1007/s00464-016-5303-1
- 9.
Stewart, F., Verbeni, A, Qiu, Y., Vorstius, J., Huang, G., et al., “A Prototype Therapeutic Capsule Endoscope for Ultrasound-mediated Targeted Drug Delivery,” Journal of Medical Robotics Research, Vol. 3, No. 2, Paper No. 1840001, 2018.
10.1142/S2424905X18400019
- 10.
Joe, S., Lee, D., Kim, B., Kang, B., and Park, J. O., “Design and Dynamics Analysis of a Compact Tattooing Mechanism for a Capsule Endoscope,” Proc. of International Conference on Manipulation Automation and Robotics at Small Scales, pp. 1-4, 2017.
10.1109/MARSS.2017.8001899
- 11.
Secareanu, R., Mereu, R., Takahashi, M., Inzoli, F., and Prisecaru, I., “Experimental and Numerical Study of Freezing and Flow Characteristics of Wood’s Metal Injection in a Water Pool,” Applied Thermal Engineering, Vol. 103, pp. 1261-1277, 2016.
10.1016/j.applthermaleng.2016.04.136
- 12.
Arakawa, T., Takagi, K., Tahara, K., and Asaka, K., “Position Control of Fishing Line Artificial Muscles (Coiled Polymer Actuators) from Nylon Thread,” Proc. of Electroactive Polymer Actuators and Devices (EAPAD), Vol. 9798, Paper No. 97982W, 2016.
10.1117/12.2218850
- 13.
Rodriguez, E., Paredes, M., and Sartor, M., “Analytical Behavior Law for a Constant Pitch Conical Compression Spring,” Journal of Mechanical Design, Vol. 128, No. 6, pp. 1352-1356, 2006.
10.1115/1.2338580
- 14.
Bahadursingh, A. M., Driver, M., Koenig, C. L., and Longo, W. E., “Inadvertent Transmural India Ink Tattooing Simulating Intestinal Infarction,” The American Journal of Surgery, Vol. 185, No. 1, pp. 88-89, 2003.
10.1016/S0002-9610(02)01113-3
Biography
- Seonggun Joe
He received his B.S. and M.S. degrees from Korea Aerospace University, Korea, in 2016 and 2018, respectively. His current research interests include robotics and bio/medical application robot.
- Dongkyu Lee
He received his PhD in aerospace and mechanical engineering from Korea Aerospace University in 2018. Currently, he works as a postdoctoral researcher at the Space Mechanisms and Robotics Laboratory in Korea Aerospace University. He received his B.S. and M.S. degrees from Korea Aerospace University. His major research interests include space mechanism, robotics and bio/medical application robots.
- Byungjeon Kang
He received his BS (2008) and MS (2010) degrees in mechanical engineering from the Chonnam National University, Gwangju, Korea, and a PhD (2015) degree in biorobotics from Scuola Superiore Sant’Anna, Pisa, Italy. He is a senior research scientist in the Medical Microrobot Center, Chonnam National University, Gwangju, Korea. His research interests include microactuator/robot and micromanipulation for biomedical applications.
- Jong-Oh Park
He received his BS (1978) and MS (1981) degrees from the department of mechanical engineering, Korea, and a PhD (1987) in robotics from Stuttgart University, Germany. Between 1982 and 1987, he worked as a guest researcher at the Fraunhofer-Institut für Produktionstechnik und Automatisierung (FhG IPA), Germany. He worked as a principal researcher in the Korea Institute of Science and Technology (KIST) from 1987 to 2005, and he was a director of the Microsystem Research Center at KIST from 1999 to 2005. In 2005, he moved to Chonnam National University where he is now a full professor in the School of Mechanical Engineering and a director of the Robot Research Initiative (RRI). His research interests are biomedical microrobots, medical robots, and service robots.
- Byungkyu Kim
He received his PhD. in mechanical engineering from the University of Wisconsin, Madison, in 1997. From 1997 to 2000, he was a technical staff member of Center for X-ray Lithography in the University of Wisconsin where he developed a computer code for thermal modeling of a mask membrane and wafer during beam exposure. From 2000 to 2005, he worked for Microsystem Center of KIST as a principal research scientist. He was in charge of developing a microcapsule-type robotic endoscope. Currently, he is a professor in Korea Aerospace University. His research interests include space mechanism, robotics, micro/nano-manipulator and bio/medical application robots.