ABSTRACT
In the case of paralysis caused by brain diseases and accidents, proper rehabilitation and supplementary systems for daily life are essential. In this study, we designed a system that can enable daily life by supporting the hand of a patient whose function has been lost to paralysis. The hand exoskeleton robot proposed in this study can be transported for the purpose of ADL (activities of daily living). It was designed to focus on the most important assistant for the thumb and index finger. The hand exoskeleton robot proposed in this study enables grasp and pinch motor skills during the human hand operation through the specific mechanism for the segment movement of the human finger simultaneously. Finally, the finger movement trace of the wearer through the vision system is measured, respectively.
-
KEYWORDS: Hand exoskeleton robot, Hand rehabilitation, Rehabilitation robot
-
KEYWORDS: 손 외골격 로봇, 손 재활, 재활 로봇
NOMENCLATURE
Length of phalanges when flexion movement of MCP joint
Length of phalanges when extension movement of MCP joint
The range of motion in the high extension direction of the slide mechanism of
Fig. 8(a)
The range of motion in the flexion direction of the slide mechanism of
Fig. 8(a)
1. 서론
인구 고령화로 인해 세계적으로 노인인구 비율이 높아지고 있으며 산업 재해로 인한 척수 손상 환자도 증가되고 있다. 통계에 따르면 매년 250,000만명에서 500,000만명 정도의 척수 손상 환자가 발생되고 있다.
1,2 외골격 로봇은 이러한 노인 및 척수 손상으로 인한 마비 환자를 위해 연구 개발되고 있으며 특히 사람의 생활과 직접적으로 연관되어 있는 손의 근력 보조를 위한 손 전용 외골격 로봇들이 다양한 형태로 연구 개발되고 있다.
3
기존의 손 근력 보조용 외골격 로봇들은 구동력을 위해 주로 모터 및 공압을 사용하였고 동력 전달의 효율성을 높이기 위해 와이어 메커니즘을 사용하였다. 또한 EMG, ECG 센서 등을 사용하여 인체의 신호를 받아들여 로봇을 제어하였다. 그러나 기존의 손 근력 보조 외골격 로봇은 높은 전장부의 무게 때문에 거치를 하여 사용해야 되는 문제점이 있으며, 또한 서로 독립되어 있지 않는 로봇 조인트 메커니즘으로 인해 손가락 동작 중
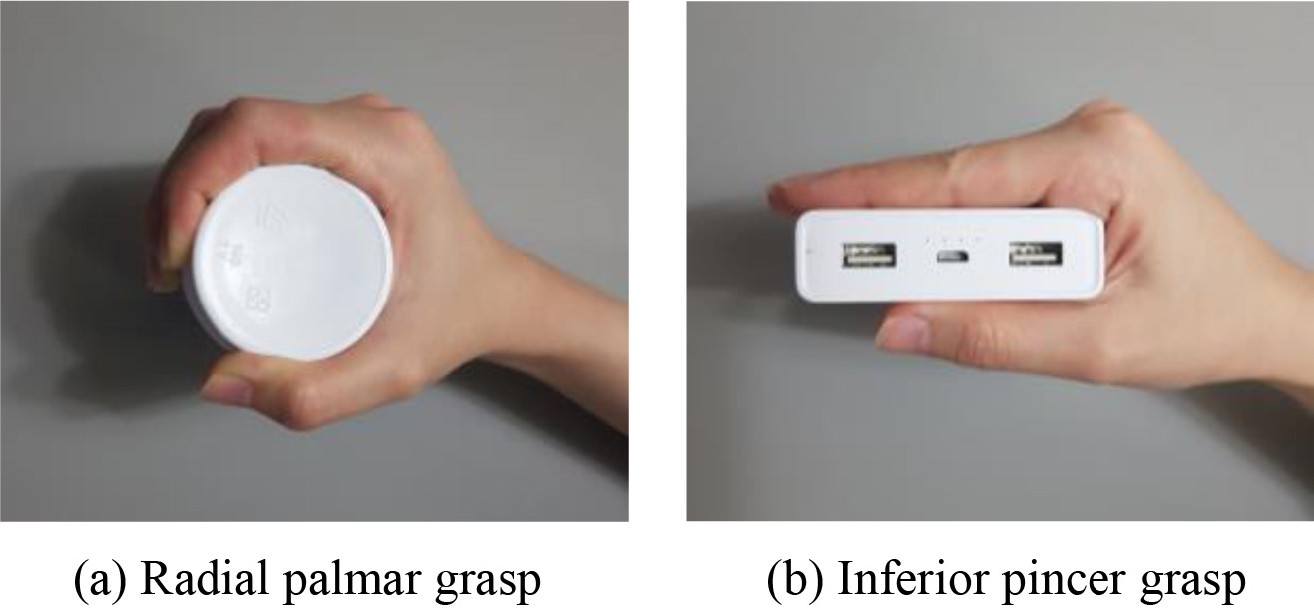
Fig. 1(a)와 같이 Radial Palmar Grasp만 가능한 단점이 존재한다.
4-6
Fig. 1 Radial palmar grasp and inferior pincer grasp of human finger movements of classification
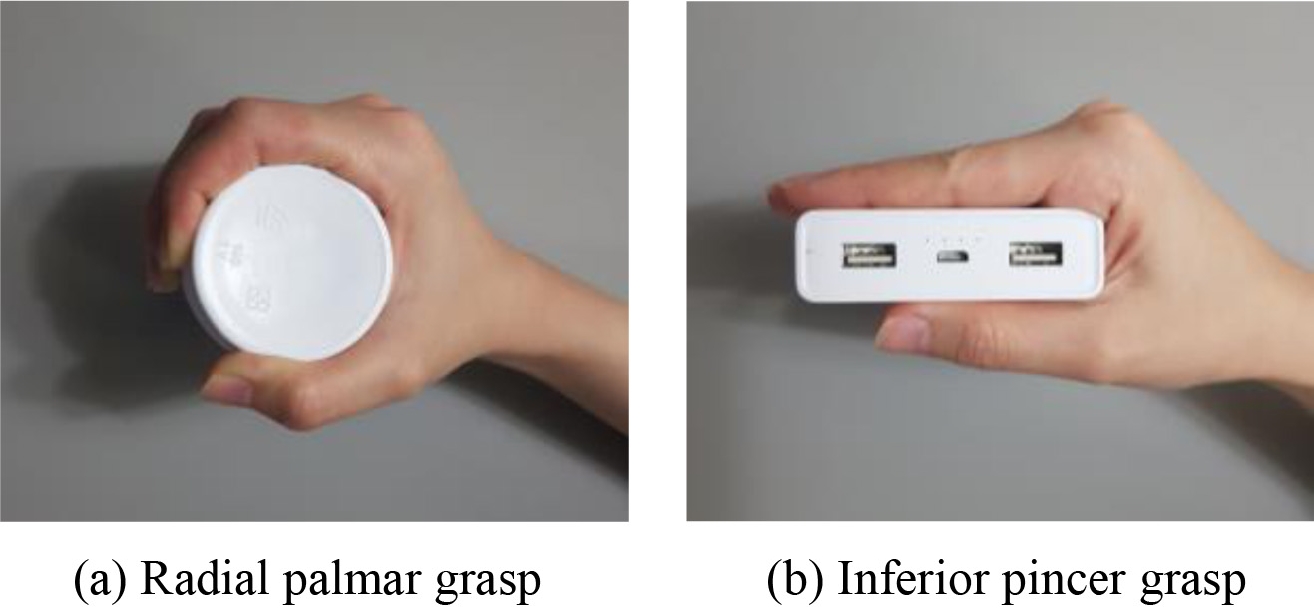
본 논문에서는 이러한 문제점들을 해결하기 위해 일상 생활 보조인 ADL이 가능한 형태의 손가락 근력 보조 외골격 로봇을 제안하며, 추가적으로는 로봇 조인트들의 분절을 개념을 통하여 Radial Palmar Grasp뿐만 아니라 Pinch 동작인
Fig. 1(a)와 같이 Inferior Pincer Grasp 동작까지 가능한 새로운 형태의 메커니즘을 개발하여 신개념 손가락 근력 보조 외골격 로봇을 제안한다.
새로운 형태의 손가락 근력 보조 메커니즘은 단순한 와이어 구동으로 동작되지 않으며 와이어와 슬라이더-크랭크 메커니즘을 결합하여 분절 운동을 할 수 있게 하였다. 본 논문에서는 메커니즘의 설계 및 제어를 위해 손가락에 대한 인체동작분석을 진행하였으며, 이를 토대로 손 보조용 외골격 로봇을 설계 및 제작하였고, 개발된 로봇의 성능 검증을 위해 파지력 측정 및 로봇 동작의 궤적을 측정하여 최종적인 성능을 확인하였다.
본 연구는 사람의 손가락 중 중요도가 가장 높은 검지와 엄지에 대해 근력 보조를 목표로 하였으며, 개발 된 휴대용 손 외골격 로봇을 ReH2로 명칭 한다.
2. 손의 자유도
2.1 검지 및 엄지의 대한 기구학적 분석
손 외골격 로봇은 다른 종류의 외골격 로봇과 다르게 인체에 완전히 밀착되어 움직이게 된다. 그러므로 해부학적인 개념을 통해 착용자의 손이 적절한 기능들을 수행할 수 있도록 ReH2에 적용될 중요 요소들을 선정하였다.
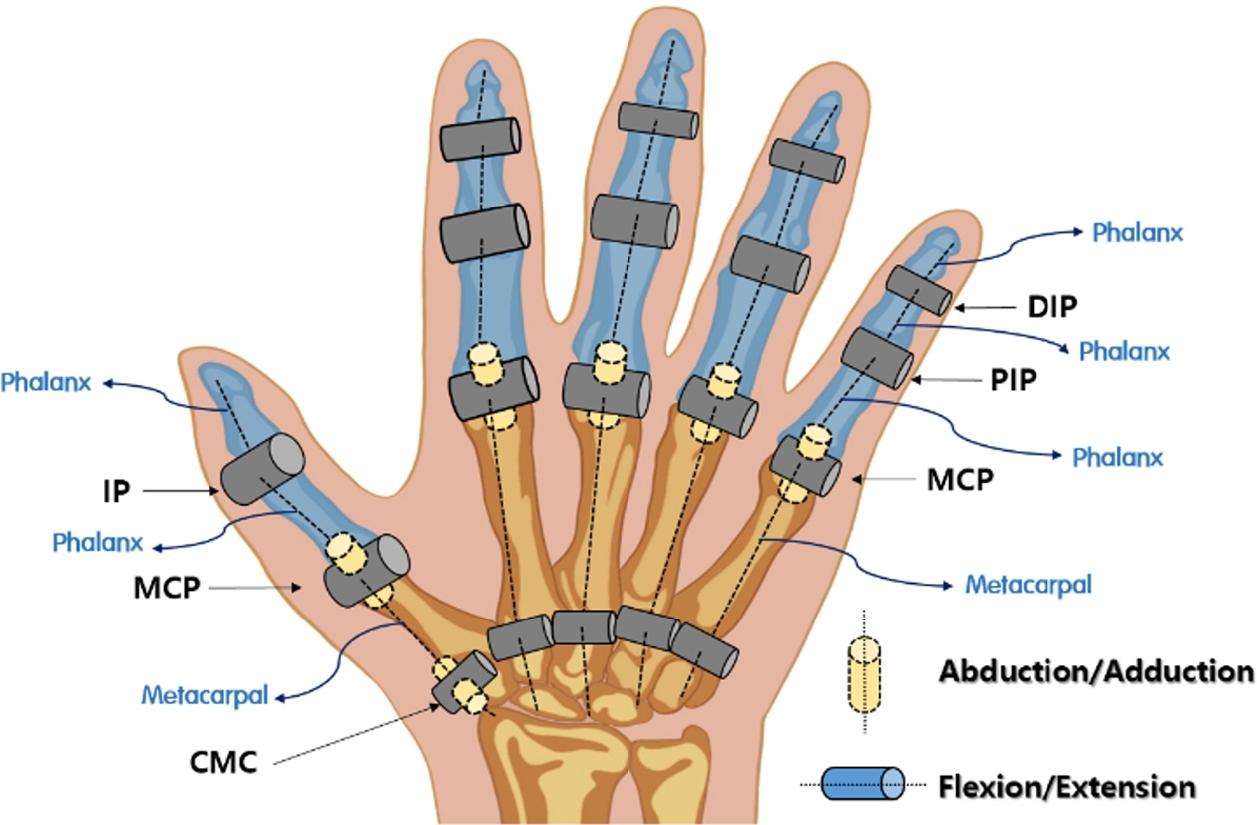
사람의 손은 인체 관절 중 가장 복잡하고 높은 자유도를 가진다. 손가락 뼈와 관절에 대해
Fig. 2에서 보이는 것과 같이 구분 지을 수 있다. 손은 다섯 개의 손가락으로 구성되어 있고 더욱 자세하게는 1개의 엄지와 4개의 다른 손가락으로 구분된다. 이것은 의학적으로 손가락 중 엄지에 대한 중요도를 나타내는 것이며 4개의 손가락 중에서는 검지에 대한 중요도가 높게 평가되고 있다.
7
Fig. 2Human hand joint configuration and bone structure of phalanx and metacarpal
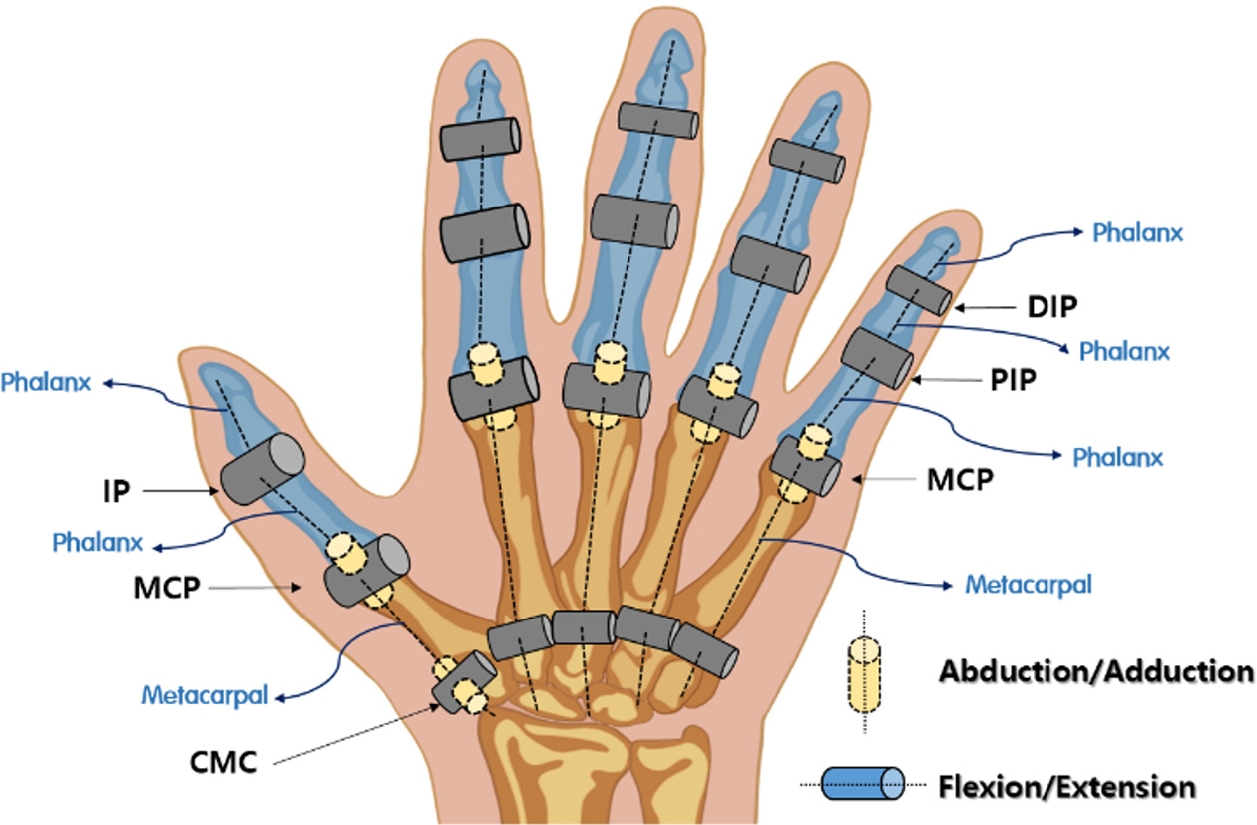
엄지의 뼈는
Fig. 2와 같이 손 허리뼈로 불리는 1개의 중수골(Metacarpal)과 2개의 지골(Phalanx)로 이루어져 있으며, 검지를 포함한 나머지 4개의 손가락은 1개의 중수골과 3개의 지골로 구성되어 있다. 2개의 지골로 구성 된 검지는 나머지 4개의 손가락보다 중요성을 가지고 있지만 1개의 자유도를 덜 가지고 있다.
엄지 손가락은
Fig. 2와 같이 Metacarpophalangeal (MCP) 조인트와 Interphalangeal (IP) 조인트로 이루어져 있으며 검지 손가락은 기본적으로 MCP 조인트와 Proximal Interphalangeal (PIP) 조인트, Distal Interphalangeal (DIP) 조인트로 구성되어있다. 검지 손가락의 경우 DIP 조인트는 PIP 조인트에 종속되어 있어 단독으로 움직일 수 없는 조건을 가지고 있다. 이러한 손가락에 대한 구조적 조건은 외골격 로봇의 링크 메커니즘의 구성을 결정짓는데 중요한 역할을 하게 된다.
8
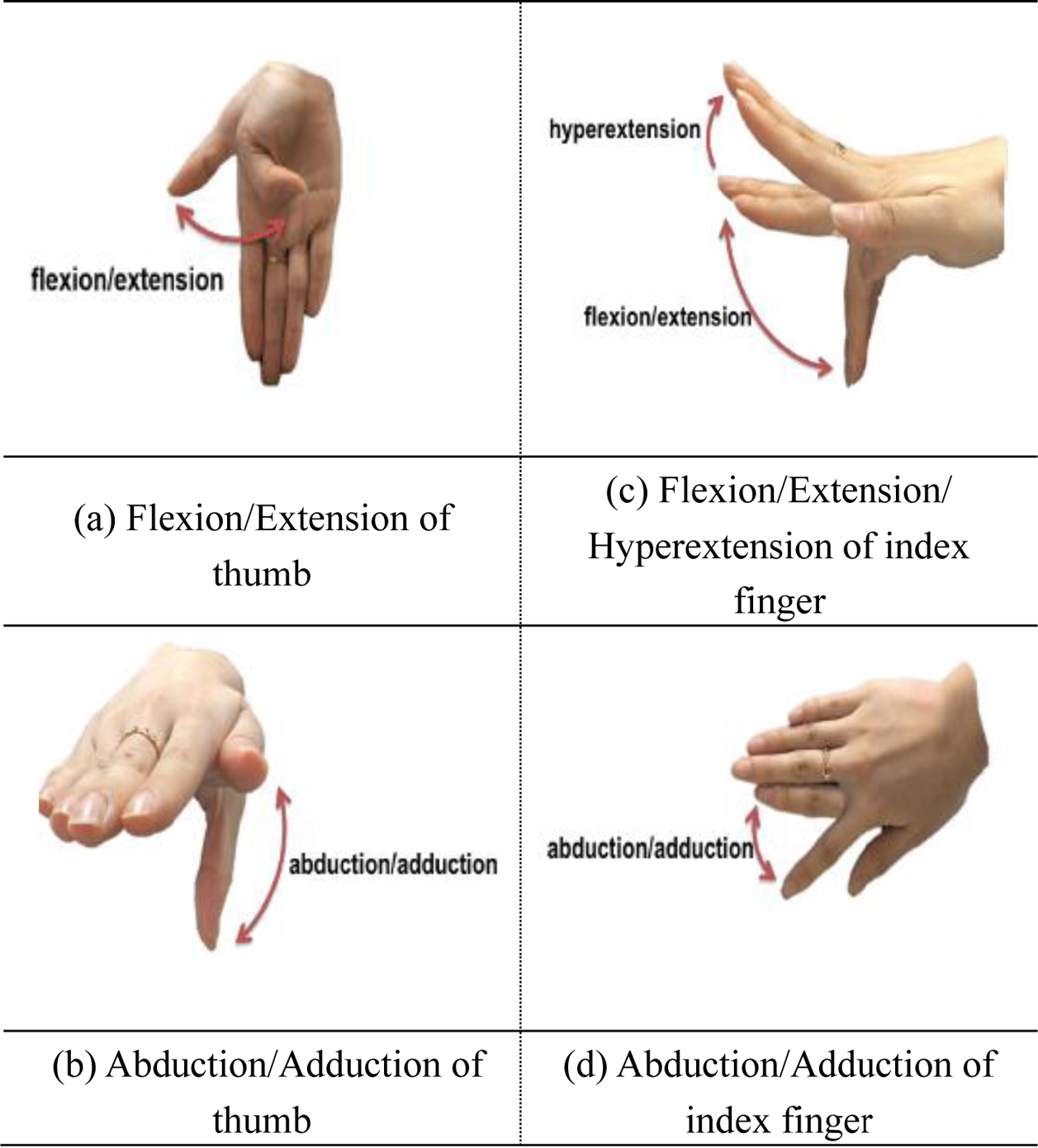
엄지의 MCP 조인트 경우 2DOF로 구성되어
Figs. 3(a)와
3(b)와 같이 엄지를 들어 올리거나 내리는 Abduction/Adduction운동과 손 안쪽으로 구부리거나 바깥쪽으로 피는 Flexion/Extension 운동이 가능하다. IP 조인트는 1DOF로 구성되어 손 안쪽으로 구부리는 운동이 가능하다.
Fig. 3Flexion / Extension / Hyperextension / Abduction / Adduction movement of thumb and index finger
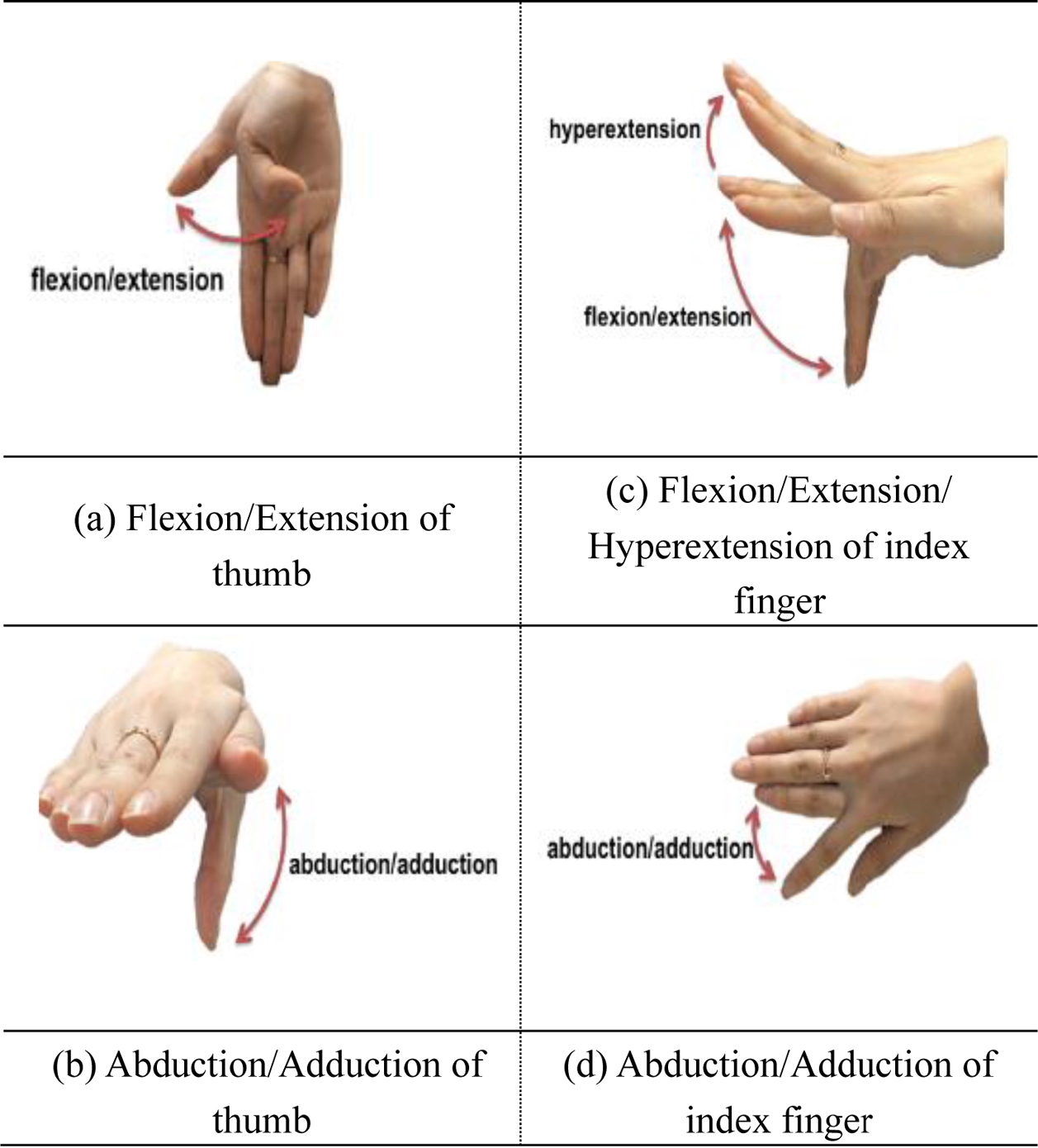
검지를 포함하여 다른 4개의 손가락은
Figs. 3(c)와
3(d)와 같이 MCP 조인트에서 손가락을 서로 벌리거나 조이는 Abduction/Adduction 운동과 손바닥 안쪽으로 구부리거나 바깥쪽으로 펴는 동작인 Flexion/Extension 운동과 손등 수평면을 기준으로 일정 범위를 넘어가게 되는 Hyperextension 운동이 가능하다. 엄지와 마찬가지로 PIP, DIP 조인트의 경우 손바닥 안쪽으로 구부리는 운동을 하게 된다.
엄지 및 검지를 포함한 4개 손가락의 Abduction/Adduction 운동의 명칭은 같지만 운동 방향이 상반되어 서로 구별된 운동을 한다.
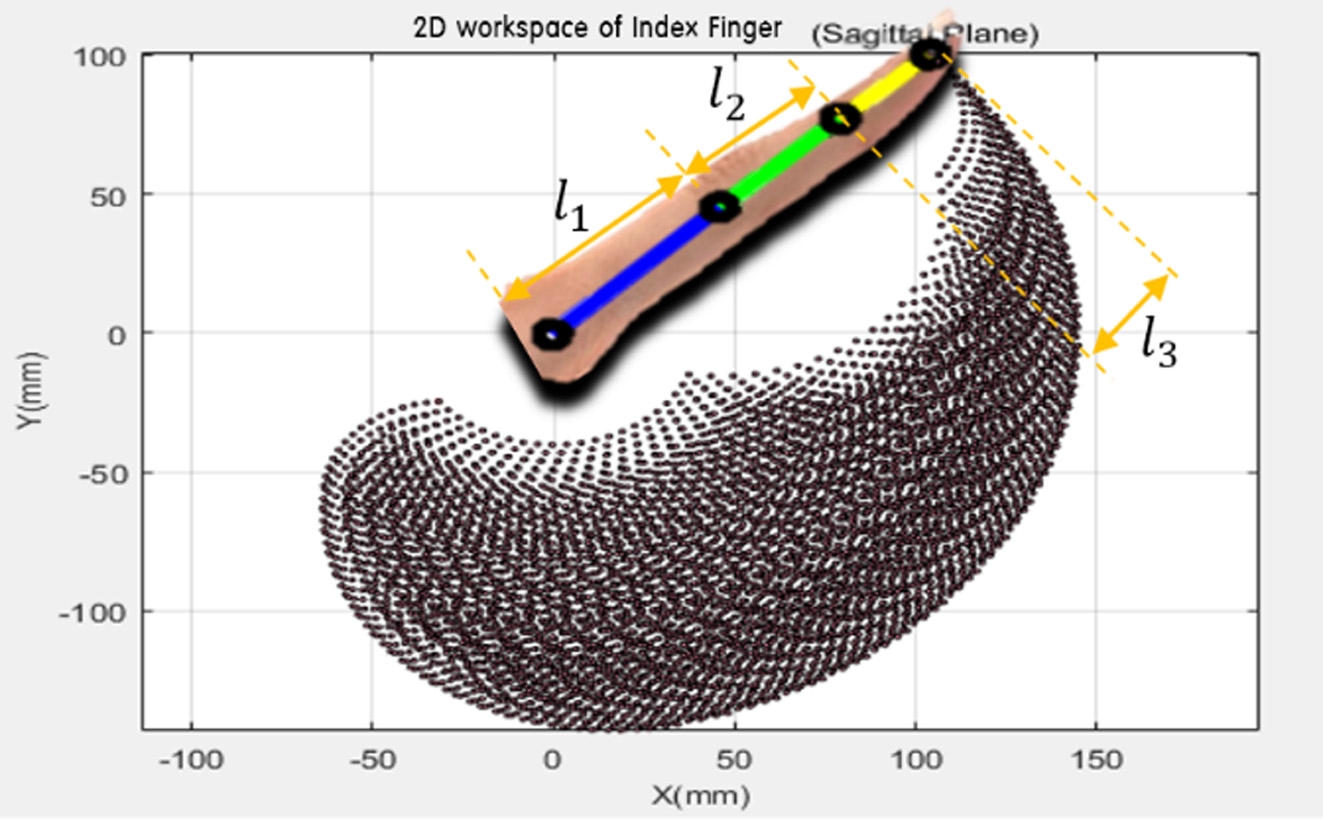
핸드 전용 외골격 로봇을 개발하기 위한 설계 변수들 중 손가락에 대한 ROM 및 DOF 분석을
Fig. 4와 같이 진행하였다. 검지 손가락의 경우 MCP 조인트를 기준으로 시작하여 PIP, DIP조인트의 움직임을 인체의 3평면 중 시상면(Sagittal Plane) 기준으로 Matlab 2018a 프로그램을 활용하여 시뮬레이션을 진행하였다. 손가락 각 조인트 사이의 길이
l1,
l2,
l3는 한국인의 인체치수를 조사하여 자료로 제공하는 사이즈코리아에서 연령별 손가락 길이의 최대치를 토대로 선정하였다.
9
Fig. 4Workspace simulation result of the index finger and shows the area of index finger ROM

손가락 움직임에 대한 기구학적 시뮬레이션을 통해 Workspace를 분석하였으며,
Table 1과 같이 엄지 손가락의 운동방향 별로 조인트의 운동 반경을 선정하였다. 엄지의 Flexion/Extension 운동은 CMC, MCP, IP 조인트가 서로 종속되어 움직이게 되며, MCP 조인트 경우 약 85º의 운동 반경을 가지는 것으로 분석되었다. 엄지가 손등 방향으로 꺾는 운동인 Hyperextension의 경우도 마찬가지로 각 조인트가 복합 운동을 하게 되며 IP 조인트는 사람이 수동으로 꺾었을 때 30°까지 움직일 수 있는 특징을 가진다. 엄지 손가락을 중령 방향인 위아래로 움직이는 운동 Abduction/Adduction의 경우 IP 조인트는 작용되지 않으며 CMC, MCP 각각 70º 정도의 운동 반경을 가진다.
Table 1ROM of thumb
Table 1
Movement
of thumb |
Joint type |
|
CMC (º) |
MCP (º) |
IP (º) |
|
Flexion/Extension |
15 |
85 |
50 |
|
Hyperextension |
20 |
20 |
30(Passive)
|
|
Abduction/Adduction |
70 |
70 |
0 |
검지 손가락의 경우
Table 2와 같이 손가락 운동에 대한 조인트의 운동 반경이 선정되었다. 손가락을 손바닥 안쪽으로 구부리는 동작인 Flexion/Extension 의 경우 MCP, PIP, DIP 조인트 모두 서로 종속되어 움직이게 되며, 그중 PIP 조인트의 운동 반경이 제일 넓은 90°-110°로 선정 되었다. 손등 방향으로 꺾게 되는 Hyperextension의 경우 MCP 조인트와 DIP 조인트가 가능하며 PIP 조인트는 운동 반경을 가지지 않는다. DIP 조인트는 사람이 손가락을 잡고 꺾었을 때 30° 정도의 운동 반경을 가지게 된다. 검지 손가락을 좌우로 벌리거나 오므리는 동작인Abduction/Adduction 운동은 오직 MCP 조인트에서만 운동을 하게 되며 약 30° 정도의 반경으로 선정되었다.
10
Table 2ROM of index finger
Table 2
Movement
of index finger |
Joint type |
|
MCP (º) |
PIP (º) |
DIP (º) |
|
Flexion/Extension |
70-95 |
90-110 |
95 |
|
Hyperextension |
35 |
0 |
30(Passive)
|
|
Abduction/Adduction |
30 |
0 |
0 |
2장에서 분석된 손가락들에 대한 데이터는 3장에서 소개될 손가락 외골격 로봇 설계에 참조 되었다.
3. 손 외골격 로봇 ReH2의 설계
3.1 Design Requirements
손 외골격 로봇을 개발하기 위해선 여러 가지의 요구 사항들을 고려해야 한다. 이번 장에서는 손 외골격 로봇을 개발하기 위한 요구 사항들에 대해 정리하였다.
3.1.1 착용성 및 안정성
외골격 로봇 연구에서 중요하게 언급되는 분야 중에는 착용성에 대한 연구 내용들이 있다. 외골격 로봇은 산업용 로봇 및 다른 로봇 분야와 다르게 사람이 직접 착용하는 형태로 로봇 분야 중에서 사람에게 가장 밀접해 있기 때문이다. 이러한 이유로 외골격 로봇의 착용성을 높이기 위한 연구가 활발하게 이루어지고 있는 추세이다.
외골격 로봇의 착용성 연구는 사람마다 각기 다른 인체 사이즈 및 구조 조건이 존재할 때 사람이 착용 후 불편함 최소화와 로봇의 구동력 전달을 최적화하는 것에 있다. ReH2는 사람이 손가락에 착용하는 로봇이며 3D Printer를 사용하여 설계된 로봇 구조를 형상화하였다. 3D Printer의 장점으로 복잡한 구조를 생산할 수 있다는 것을 활용하여 착용성과 안정성 높은 구조를 설계하였다.
3.1.2 손가락 선정
사람의 다섯 손가락은 일상생활을 지낼 때에 각기 다른 비율의 영향력을 가진다. ReH2를 설계하기 전에 각 손가락에 대한 우선순위를 장애등급 기준에서 영향을 많이 미치는 순서로 선정하였다.
장애등급 기준에서 큰 영향을 가지는 엄지 손가락과 검지 손가락을 선택하였고, 손 외골격 로봇인 ReH
2은 엄지와 검지만을 근력 보조할 수 있게 연구개발 되었다.
12
3.1.3 손가락 보조 동작 선정
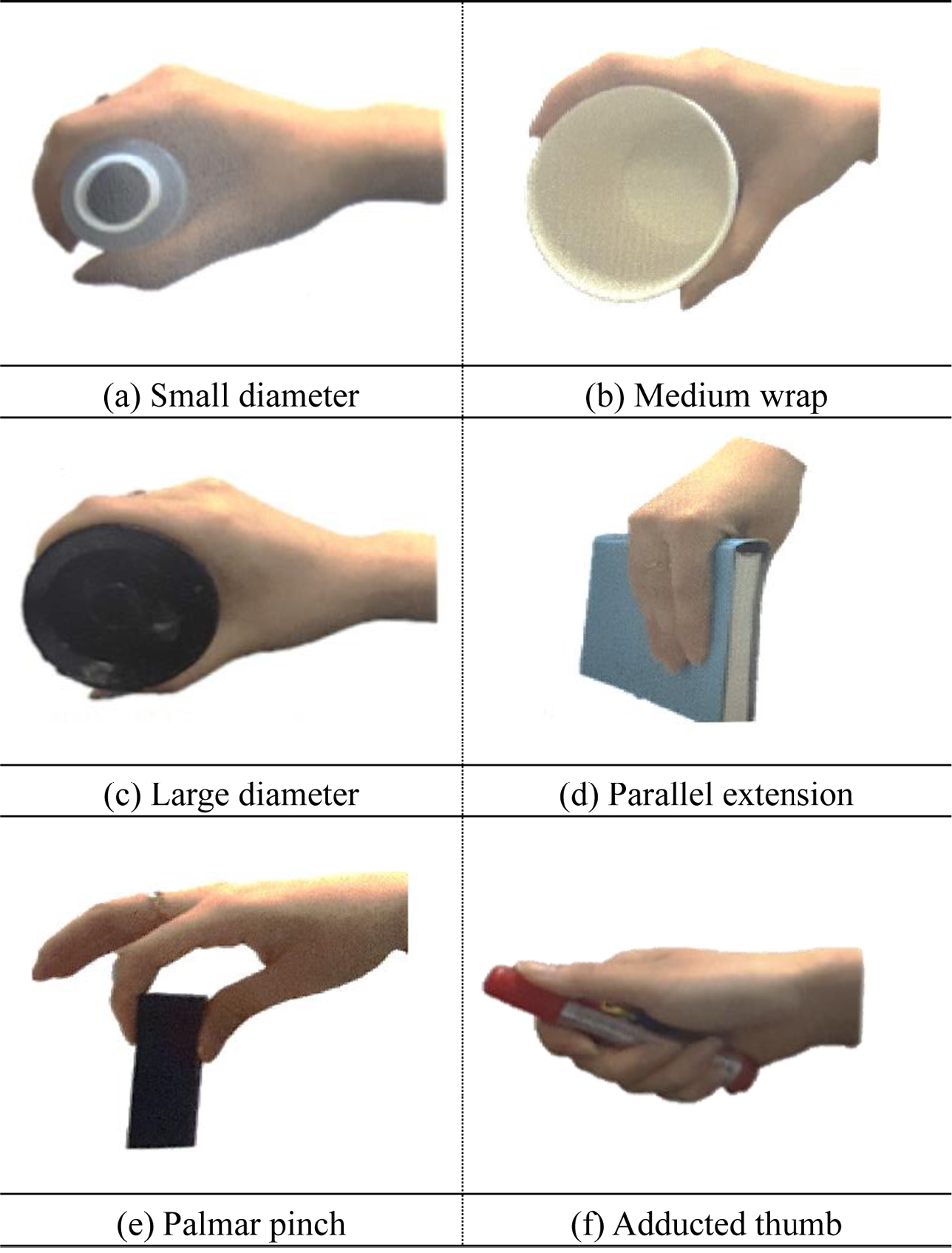
본 장에서는 효과적인 재활 및 근력 보조를 위해 목표 손동작을 선정하였다. Activities of Daily Living (ADL)에 있어서 다양한 손동작은 효과적인 재활 및 근력 보조를 위해 필수적이다. ReH
2는
Fig. 5에서 보이는 것과 같이
Figs. 5(a)부터
5(f)의 각기 다른 손동작 보조를 할 수 있게 목표로 선정되었다.
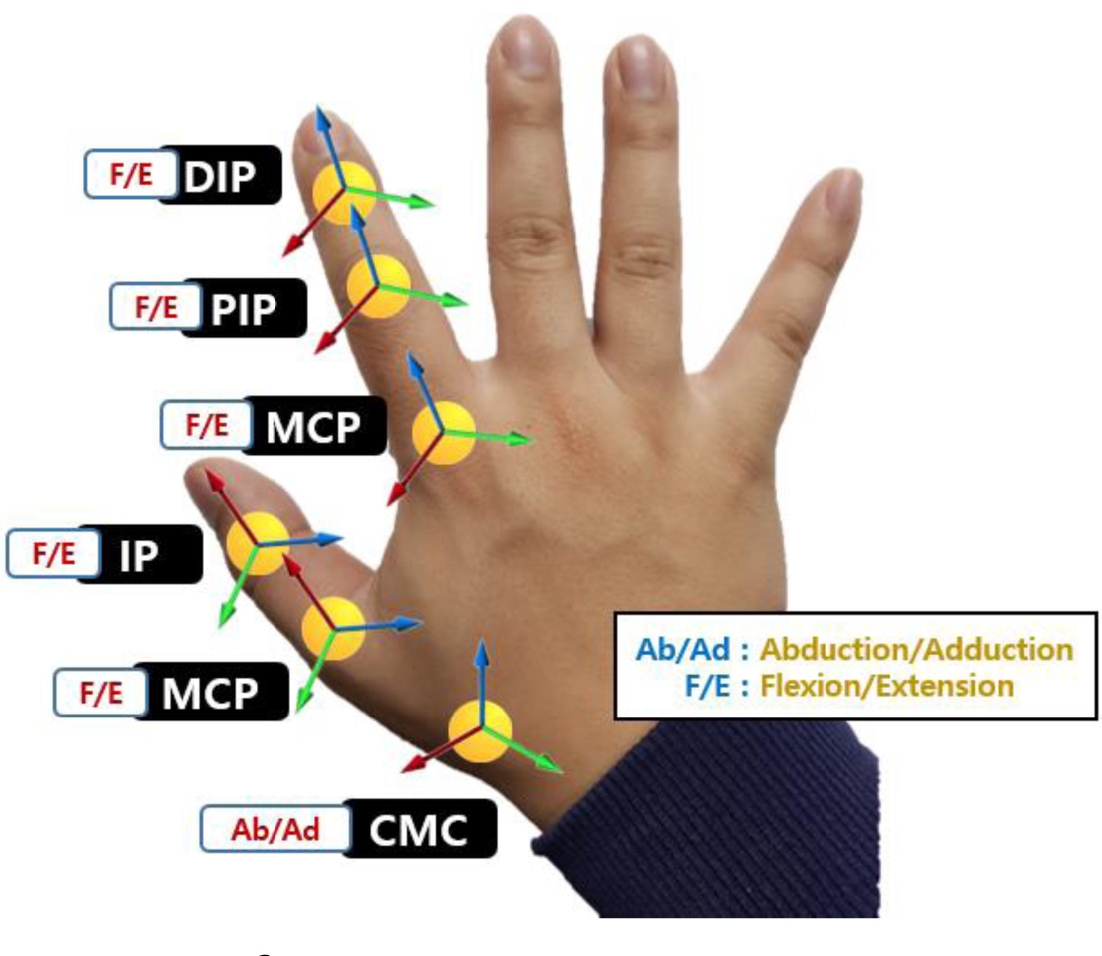
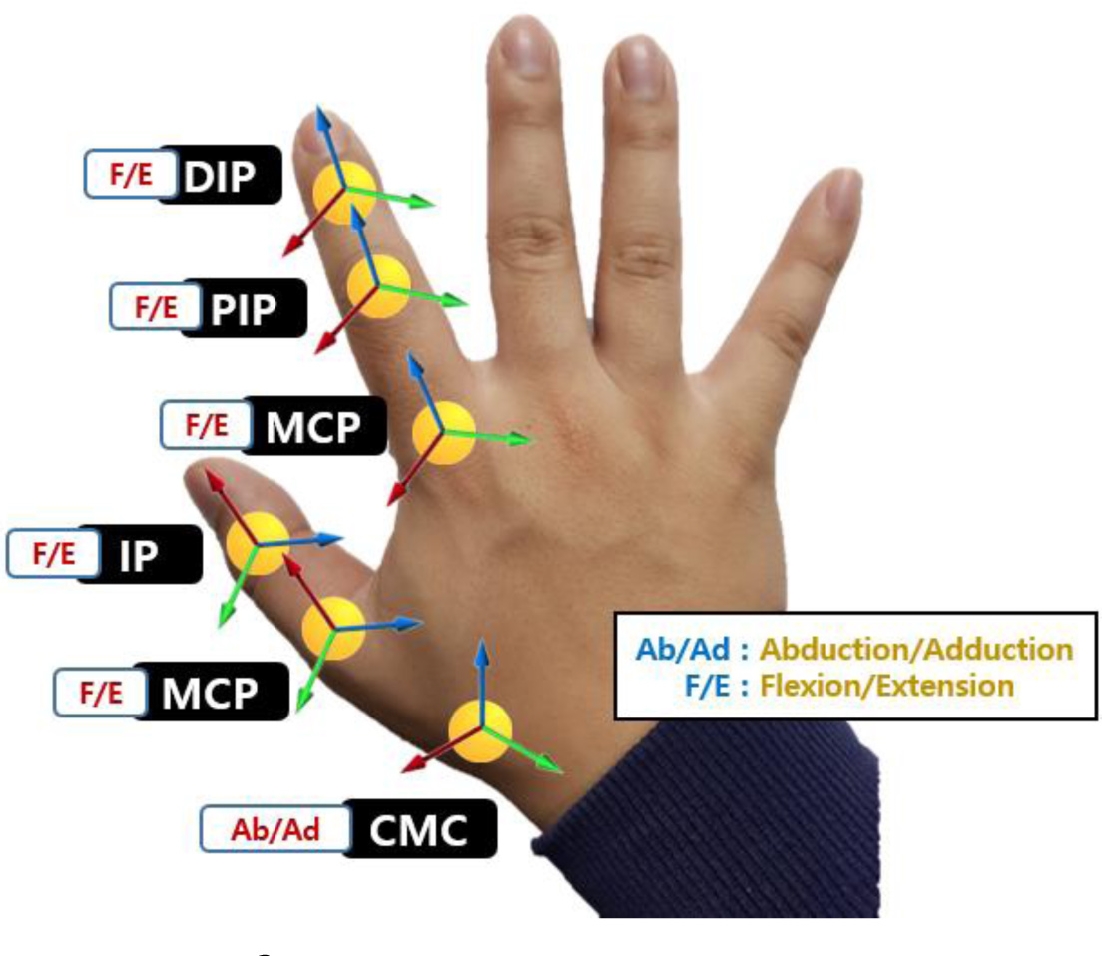
Fig. 5와 같이 각기 다른 손동작을 보조하려면
Fig. 6과 같이 손가락 조인트에서의 DOF 배치가 이루어져야 한다. ReH
2는 CMC 조인트에서 Abduction/Adduction 운동 방향의 DOF와 MCP, IP 조인트에서는 Flexion/Extension 운동 방향으로 DOF가 배치되었으며, 검지에서는 MCP, PIP 그리고 DIP 조인트 모두 Flexion/Extension 운동 방향으로 DOF가 배치되었다. 하지만 Pinch와 같은 손가락 동작을 위해서는 MCP 조인트가 다른 조인트와 종속돼 어선 안되며, DIP와 PIP 조인트가 고정된 상태에서 단독 움직임이 가능하여야 한다.
Fig. 5Classification of the hand gripping operation aimed at ReH2 and it is characterized by enabling the pinch operation11
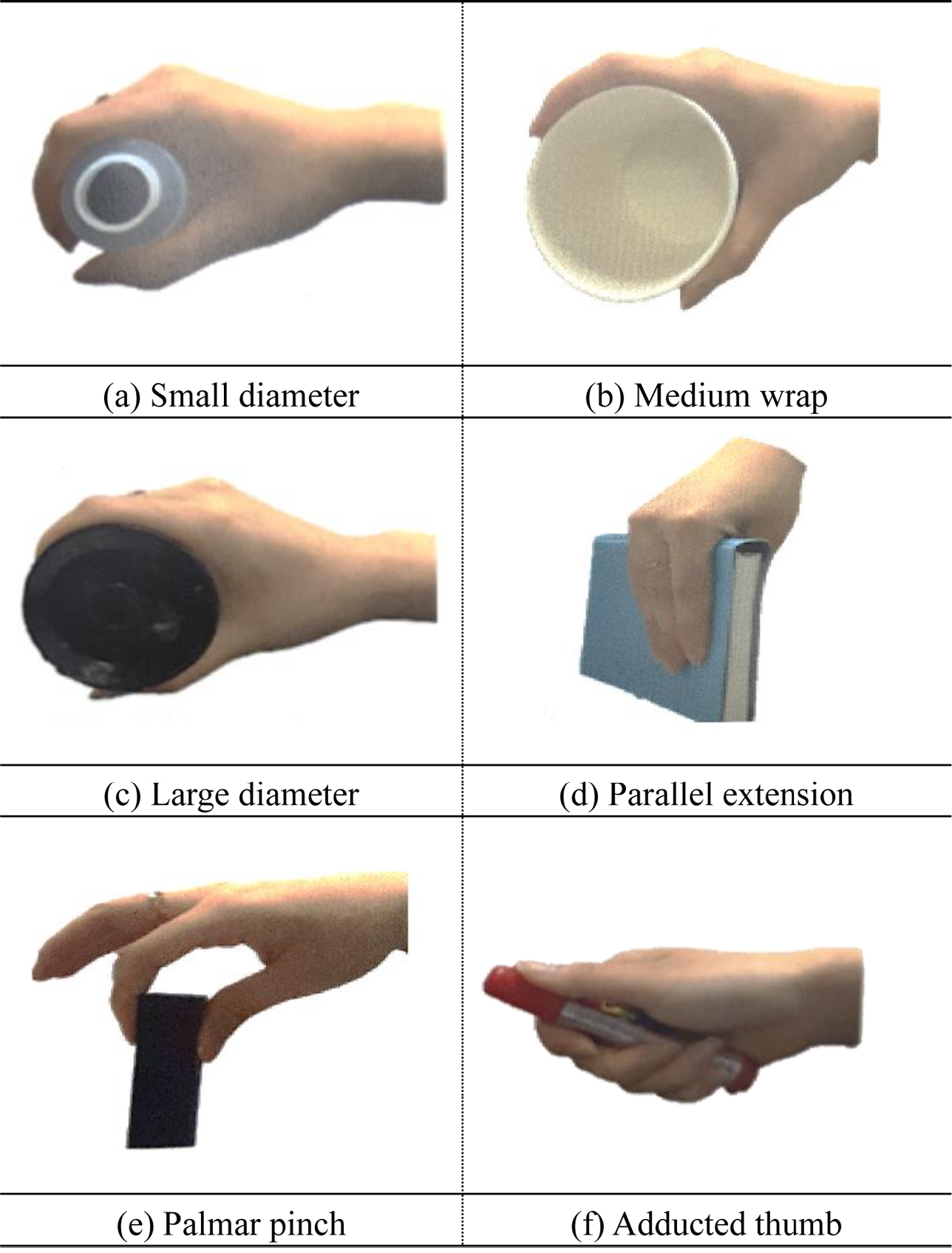
Fig. 6Robot ReH2 is the joint type scheme for executing the hand movements shown in Fig. 4
본 연구에서 제안된 ReH2 로봇은 손의 Pinch 동작과 Grasp 동작을 동시에 할 수 있게 하기 위해 Linkage Mechanism과 Tendon Mechanism을 동시에 가지는 새로운 형태의 손 외골격로봇 구조를 제안하였다. 이것은 3.2장에서 자세히 설명하도록 한다.
3.1.4 모터 선정
앞 장에서 언급된 설계조건들을 토대로 엄지와 검지 손가락의 근력 보조를 위한 외골격 로봇의 모터를 선정하였다.
Fig. 5와 같은 손동작을 하기 위해서 ReH
2 로봇은 총 4개의 모터로 구성하였으며, 엄지 손가락에 2개 모터, 검지 손가락에 2개의 모터가 사용되었다. 모터의 종류는 ROBOTIS사의 다이나믹셀 모델인 MX-64AR을 사용하였다. MX-64AR은 0.088º의 분해능을 가지고 있으며 최대 Stall Torque 7.3 Nm의 출력이 가능한 모터이다.
마비 및 부상으로 인해 신경 손상을 당한 환자의 손을 로봇으로 보조하여 ADL이 가능하게 하기 위해서는 약 10 N의 파지력이 손에 착용된 로봇으로부터 유지되어야 한다.
13 일본의 나고야 공업 대학에서는 10 N의 파지력을 위해 개발된 로봇 각각의 손가락에서 발생될 파지력을 3N으로 설정하여 실험적으로 증명하였다.
14
본 연구에서 개발된 ReH2 경우에는 검지와 엄지만을 보조한다는 특징을 고려하여 위에서 언급한 MX-64AR 모터를 로봇에 장착하고 약 10 N의 파지력이 발생될 수 있도록 하였다. 10 N에 대한 파지력은 뒤에서 언급될 4장에서 실험적으로 증명하였다.
3.2 메커니즘 설계
본 장에서는 3.1장에서 언급되었던 설계 요구 사항을 참조하여 개발된 휴대용 손 외골격 로봇의 상세 설계에 대해 소개한다. 엄지 손가락에 착용될 로봇은 2개의 Tendon Mechanism이 사용되며, 검지 손가락에 착용될 로봇은 Linkage Mechanism과 Tendon Mechanism이 결합 된 형태이다. 본 연구에서는 상세 설계를 위해 Solidworks CAD Tool을 사용하였다.
3.2.1 Mechanism Design for Thumb
본 장에서는 엄지 손가락의 근력 보조를 위한 ReH2 로봇의 엄지 부분의 메커니즘을 소개하며, 3.1장의 조건들을 기준으로하여 엄지 손가락의 운동 궤적이 나올 수 있도록 메커니즘 설계를 진행하였다.
ReH
2의 형상을 보면 엄지 손가락 끝부분에 착용할 수 있는 형태의 파트와 엄지 손가락 중간에 위치한 Phalanx 뼈에 끼울 수 있는 반지 형태로 되어있다. 반지 형태로 되어있는 파트에는 CMC 조인트 부분에 착용되어 Abduction/Adduction 움직임을 보조할 수 있도록 3개의 반지가 합쳐진 형태로 특수한 구조를 가지고 있다. 3개의 반지가 합쳐진 구조는 엄지 손가락의 Metacarpal 부분의 뼈 구조 및 살에 안착될 수 있도록 설계되었으며 착용자의 엄지 손가락이 불편하지 않게 안착되어 편안한 움직임을 할 수 있게 해준다. 자세한 형상은
Fig. 7의 오른쪽 그림과 같이 사람 손에 착용된 모습에서 확인할 수 있다.
Fig. 7Joint and tendon mechanism structure of ReH2 Robot for hand muscle assistance of thumb
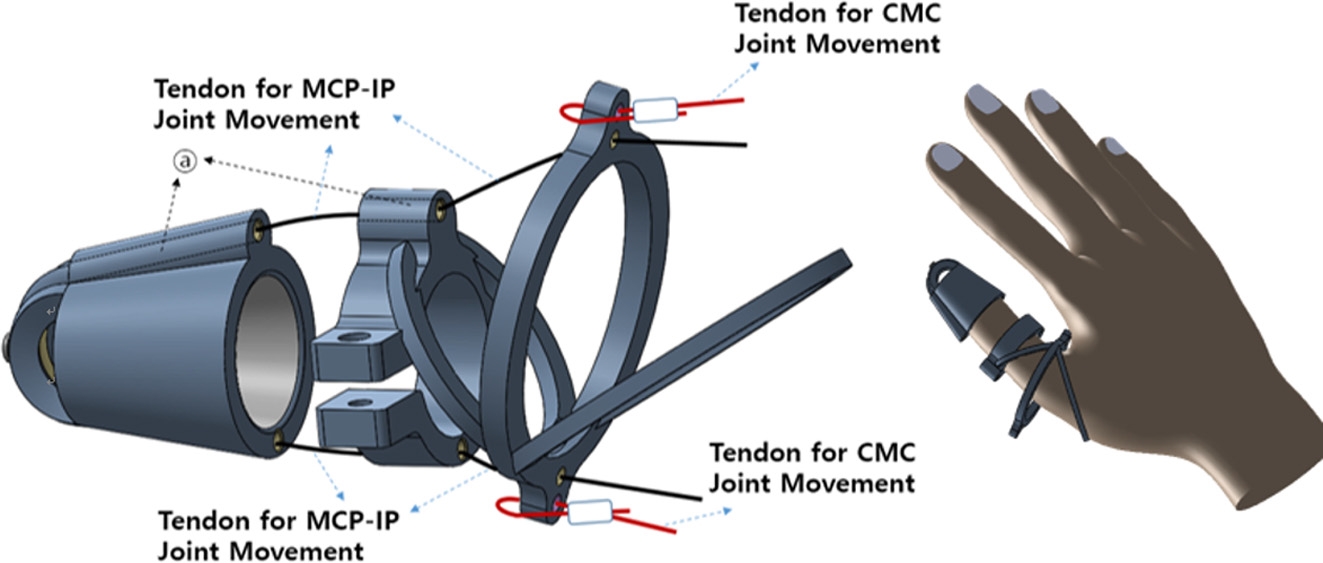
Fig. 7의 그림에서 ReH
2의 엄지 손가락 부분의 메커니즘을 보면 앞에서 설명한 반지 형태 구조에 와이어가 지나갈 수 있도록 원통 형태의 구멍이 위치해 있다. 원통 형태의 구멍은 Tendon Mechanism에서 많이 사용되는 Sheath Mechanism 구조로 모터에 의해 움직이는 와이어가 동력 전달 및 다른 외부의 영향을 받지 않도록 하는 역할을 가지고 있다.
Fig. 7의 왼쪽 그림을 보면 엄지 손톱 부위에 착용되는 첫 번째 구조물과 엄지 손가락의 중간에 착용되는 두 번째 링 구조물, 그리고 3개의 링이 합쳐진 형태의 구조물에는 MCP-IP 조인트의 Extension/Flexion 움직임을 담당하는 와이어로 이어져 있는 것을 확인할 수 있다. 3개의 링으로 합쳐진 세 번째 구조물에는 다른 구조물과 다르게 추가로 연결된 와이어가 있으며, 이 와이어는
Fig. 6에서와 같이 CMC 조인트의 움직임을 담당하게 된다.
ReH2의 Thumb Part는 2개의 와이어로 구동되어 분절 된 운동이 가능하다. CMC 조인트가 고정된 상태에서 MCP-IP 조인트만의 분절 운동이 가능하며 그 반대로도 가능하다. Thumb Part 의 와이어 구동에 사용된 모터는 사람이 등에 착용할 가방 형태의 제어부에 장착된다.
3.2.2 Mechanism Design for Index Finger
본 장에서는 3.2.1장에서의 언급된 Thumb Part의 설계와 같이 3.1장의 조건들을 토대로 검지 손가락의 근력을 보조할 수 있는 Index Finger Part의 설계에 대해 소개한다.
ReH
2의 Index Finger Part는 Thumb Part와 마찬가지로 반지 형태의 파트들이 검지 손가락의 Phalanx 뼈에 착용 되어 Tendon Mechanism 및 Linkage Mechanism의 구동력을 전달하게 된다. ReH
2의 목표 동작은
Fig. 5에서 6가지의 동작이라고 설명하였는데 특히
Figs. 5(d)와
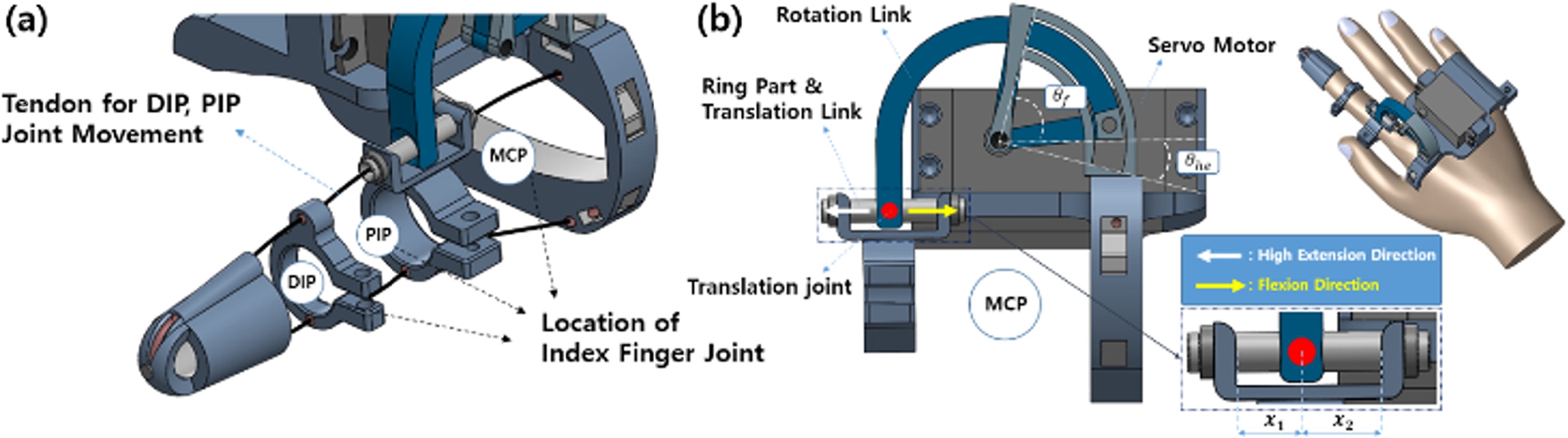
5(e) 동작을 하기위해서는 검지 손가락에서의 MCP 조인트는 DIP, PIP 조인트와의 분절 운동이 가능하여야 한다. DIP, PIP 조인트의 근력 지원 방식은 다른 로봇들과 비슷한 와이어 구동 방식이지만 MCP 조인트에는 새로운 개념의 손 외골격용 Linkage Mechanism 을 제안하여 검지 손가락에서의 분절 된 근력 보조가 가능하게 하였다.
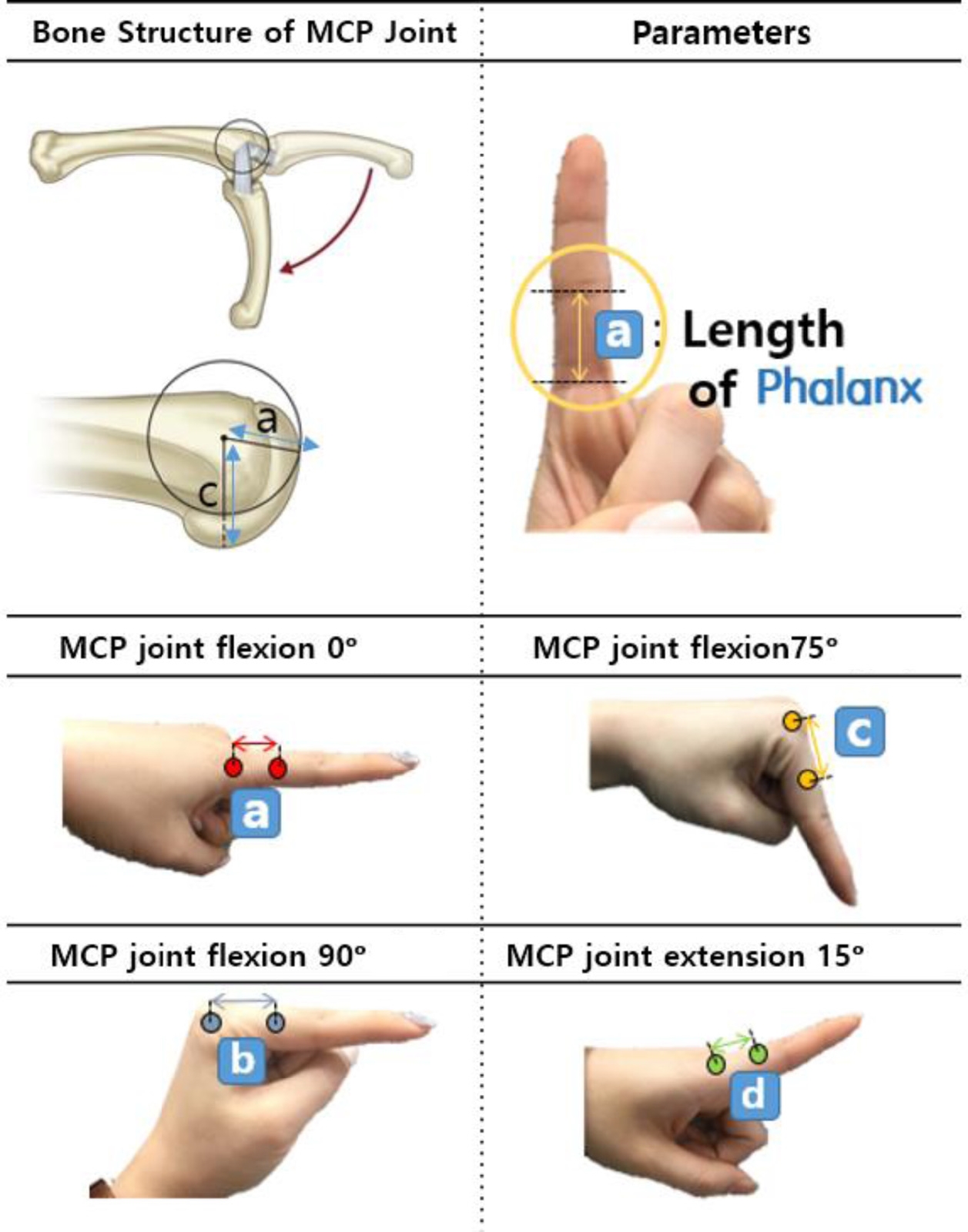
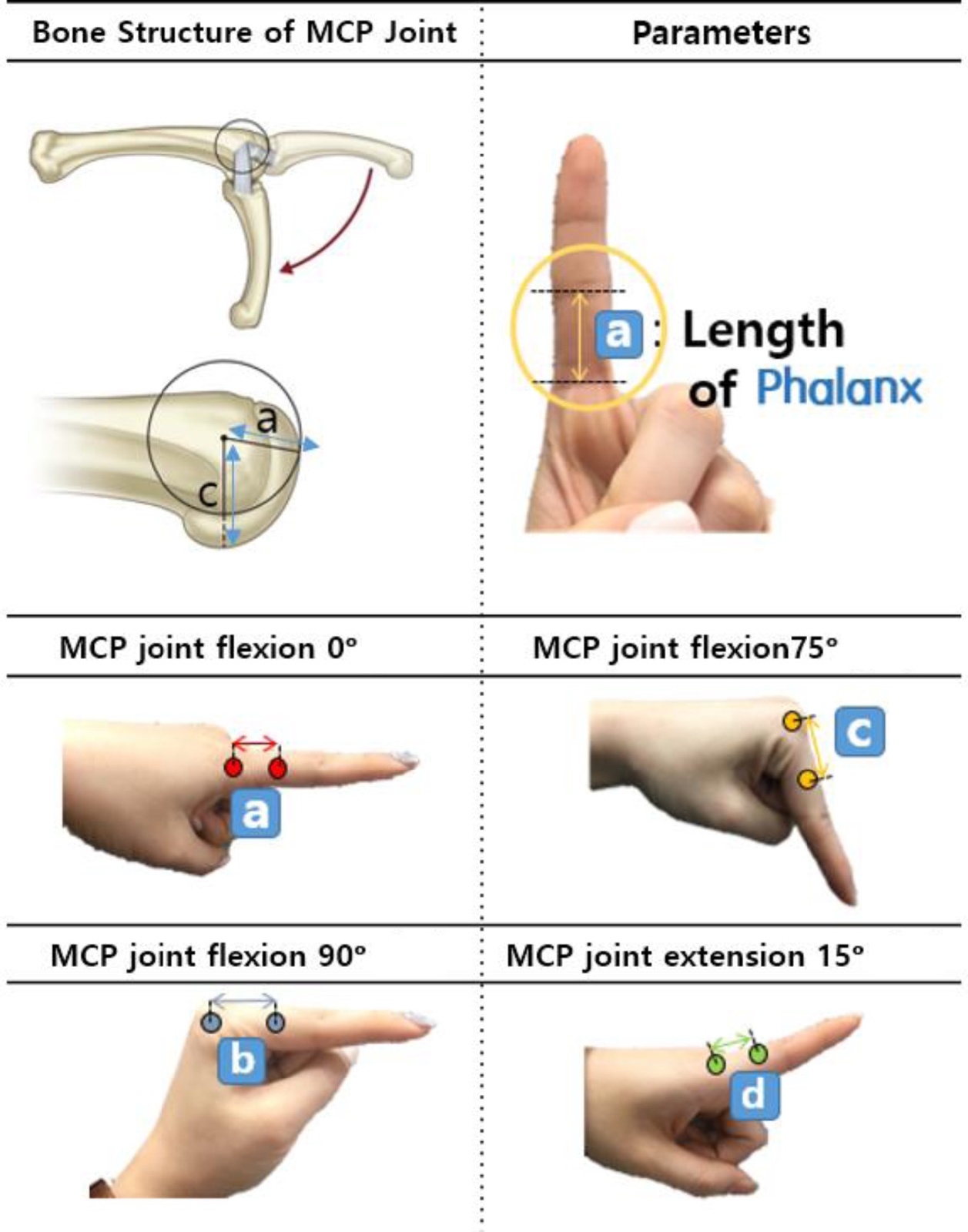
MCP 조인트에서 사용될 Linkage Mechanism을 설계하기 이전에 본 연구에서는 사람의 실제 MCP Joint의 손가락 뼈 구조를 분석하여 이에 적합한 기계 구조를 설계하였다.
Fig. 8에서 보이는 것과 같이 MCP Joint의 실제 뼈 구조는 단순한 원의 형태가 아닌 캠 구조로 형성 되어 있다. 이러한 검지 손가락 마디의 뼈 구조 형상으로 인해 손가락의 Flexion 상태가 0º일 때의 길이 a와 75º일 때의 길이 c는 달라지게 된다. 따라서
Figs. 8(a)부터
8(d)는 손가락의 Extension/Flexion 상태 별로 각각의 다른 길이를 나타낸다.
Fig. 8The bone structure of PIP joint is cam-shaped, and the length of phalanx varies when the index finger is rotated
ReH
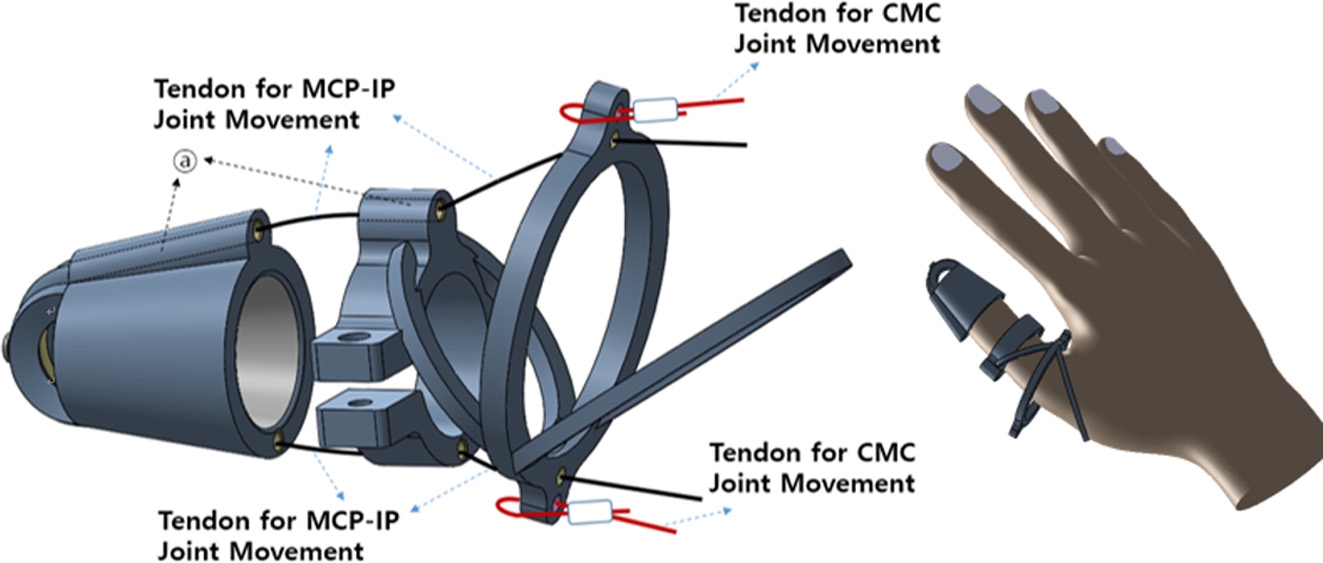
2의 Index Part는 앞에서 언급한 2가지 조건인 분절 구동과 검지의 MCP Joint 뼈의 캠 형상에 대해 고려하여 개발되었다.
Fig. 9(a)에서 확인할 수 있듯이 검지의 DIP, PIP에 대한 근력 보조는 Tendon Mechanism으로 구동 된다. 검지 손가락에 끼울 수 있게 설계된 파트들에 Sheath 역할을 할 수 있는 원통 형태의 구멍을 설계하여 와이어가 구동 될 때의 그 힘들을 검지에 전달할 수 있게 하였다.
Fig. 9The bone structure of PIP joint is cam-shaped, and the length of phalanx varies when the index finger is rotate
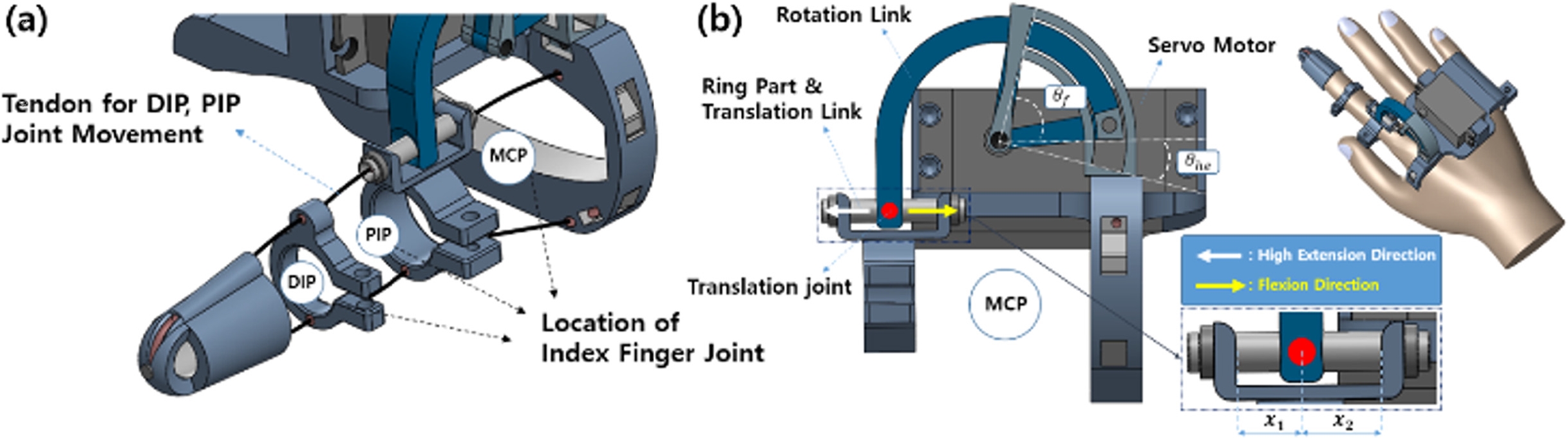
손의 Pinch 동작 근력 지원을 하기 위해서는 Tendon Mechanism으로 구성되어서는 불가능하다. 따라서 ReH
2는 P inch 동작의 근력 지원을 하기 위해
Fig. 9(a)의 형태인 Linkage Mechanism을 개발하여 적용하였다. 앞에서 설명한 것과 같이 검지의 MCP 조인트 뼈 구조와 구동되는 운동 반경을 고려하지 않고 단순한 회전 형태의 Linkage 구조를 하게 된다면 사람이 움직일 때 방해를 받아 불편하게 된다. ReH
2의 Linkage Mechanism은 회전 조인트와 병렬 조인트가 동시에 존재하여 검지 MCP 조인트에서 발생되는 CAM 형상의 궤적을 만족시킬 수 있게 되어 있다. ReH
2의 Linkage Mechanism의 중요점은
Fig. 9(a)에서의 병렬 조인트 원점이 이동할 수 있는 거리에 대한 제한이다.
Fig. 9(a)를 보면 병렬 조인트가 흰색 화살표 방향으로 움직이면 검지 손가락이 High Extension에 대한 움직이고 노란색 화살표 방향은 Flexion에 대한 움직임이다. Flexion 움직임 후 Extension은 Flexion 조인트의 영역과 서로 공유 된다.
Linkage Mechanism의 병렬 조인트에 대한 운동 거리 제한은
Fig. 8에서 검지 손가락의 운동 상태에 따라 변화 되는 Phalanx 거리인 a에 대해 비교하였으며, 병렬 조인트의 운동 범위 거리인
x1,
x2는 다음과 같은 조건식
식(1)과
식(2)를 가지게 되며 병렬 조인트의 운동 범위는 이에 따라 설계되었다.
위의
식(1)을 보면 Hyper Extension 운동방향에 대한 거리
x1는 검지 손가락이 손등과 수평인 Flexion 0º에서의 Phalanx 길이
a0와 Hyper Extension 15º에서의 Phalanx 길이
de에 대해 길이 차이만큼 확보되어야 한다.
식(2)는 Flexion 0º에서의 Phalanx 길이
a0와 Flexion 75º에서의 Phalanx 길이
cf에 대한 길이차이만큼의 거리를 확보하여야 한다.
Linkage Mechanism 의 회전 영역에 대한 제한은 θf, θhe이며 이것은 검지의 회전 각도인 Hyper Extension 15º와 Flexion 75º을 참조하여 설계되었고 그 이상의 회전 범위에 대해서는 하드웨어적인 Limit으로 설정하였다.
Linkage Mechanism의 회전 조인트는 Active이며 병진 조인트는 Passive이다. Active인 회전 조인트가 구동 될 때 병진 조인트는 종속되어 움직이게 된다.
4. 실험 및 결과
4.1 실험
3.2장에서의 내용을 토대로 휴대용 핸드 외골격 로봇인 ReH2을 제작하였다. 설계된 파트들의 생산은 무게를 줄이기 위해 대부분 3D Printer로 제작하였다. Tendon Mechanism에 사용될 와이어는 탄성이 높을수록 로봇 구동에 도움이 되지 못한다. 따라서 탄성이 적은 와이어인 200 LB의 수치와 직경 0.5mm로 선정하였다.
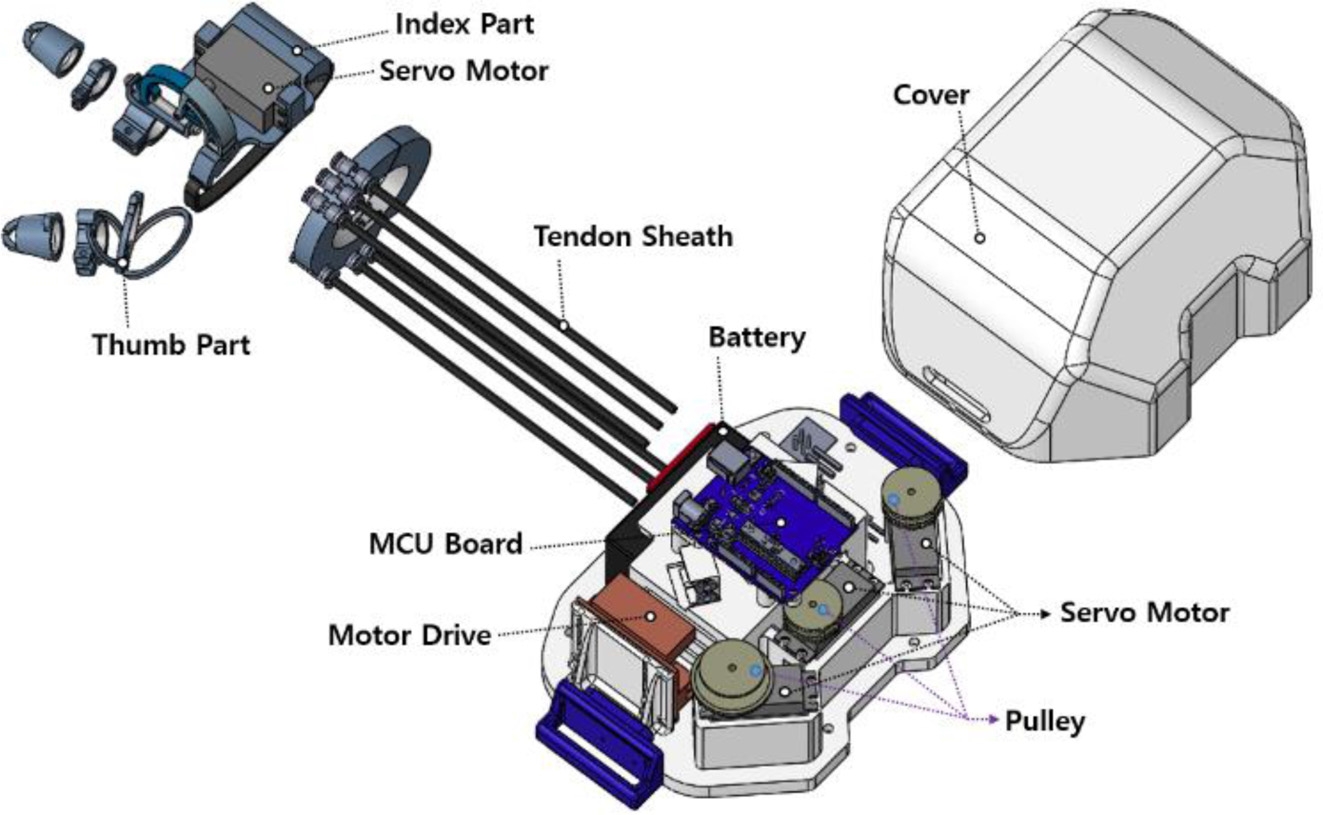
전체적인 로봇의 제어 및 구동을 위해 MCU 보드와 리튬 배터리가 배치되어 있다. 자세한 설계된 모습은
Fig. 10에서 나타내었으며, 실제 제작된 모습은
Fig. 11에서 확인할 수 있다. 실제 착용 모습을 보면 손에는 개발된 외골격 로봇이 착용되어 있고 사람의 팔을 따라서 Tendon의 구동 보조를 위한 Sheath와 손등에 있는 모터 제어 및 전력 공급을 위한 전선이 배치되어 있다. 몸통에는 Sheath와 전선을 고정시키기 위한 의류 소재의 착용 옷이 있으며, 등 쪽 요추 부분에는 제어 보드, 배터리, 구동모터 등 로봇을 구동하기 위한 전장부가 가방 형태로 착용 된 모습을 확인할 수 있다.
Fig. 10Description of the entire system of ReH2. In the control part, the position of the servomotor, MCU, batter can be checked
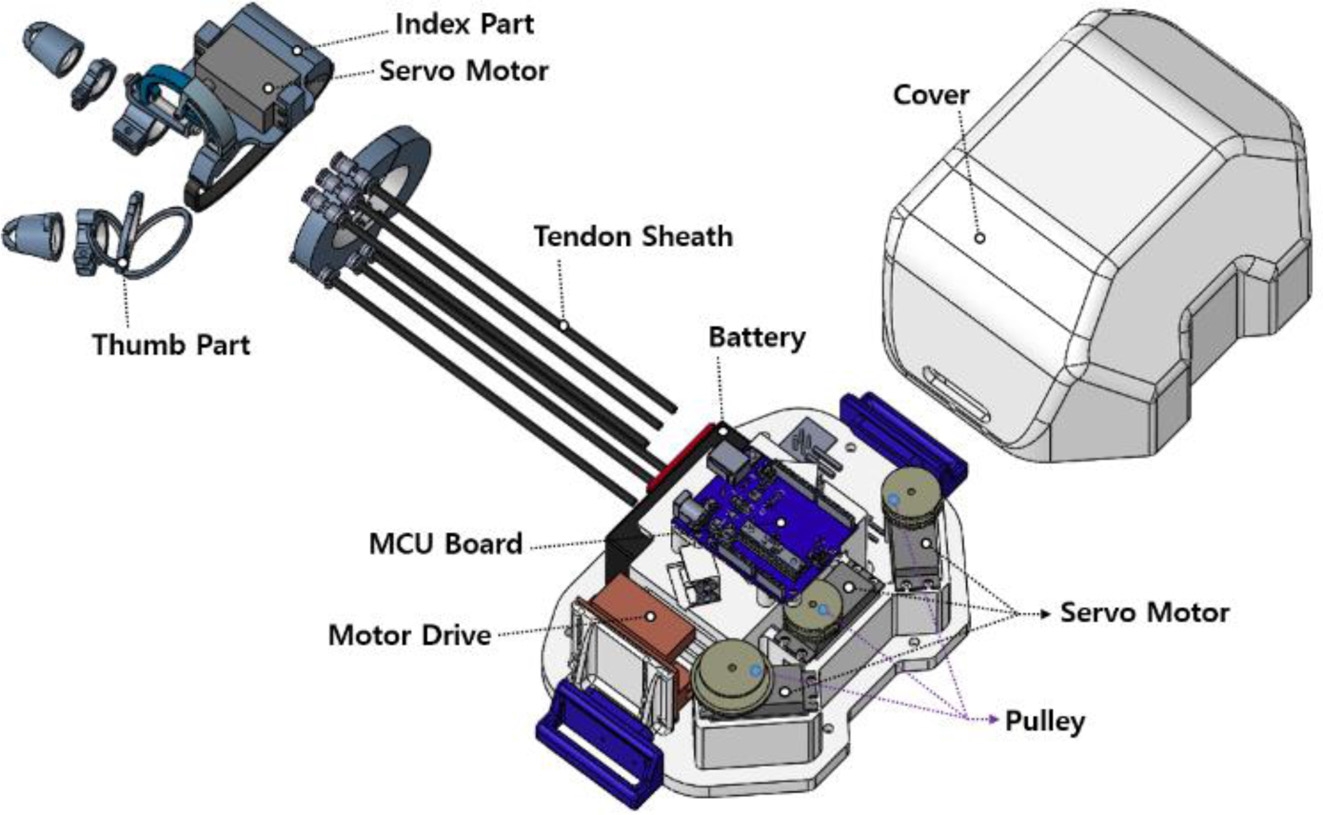
Fig. 11Produced to ReH2 Robot and worn and total weight of the ReH2 Robot is approximately 3 kg

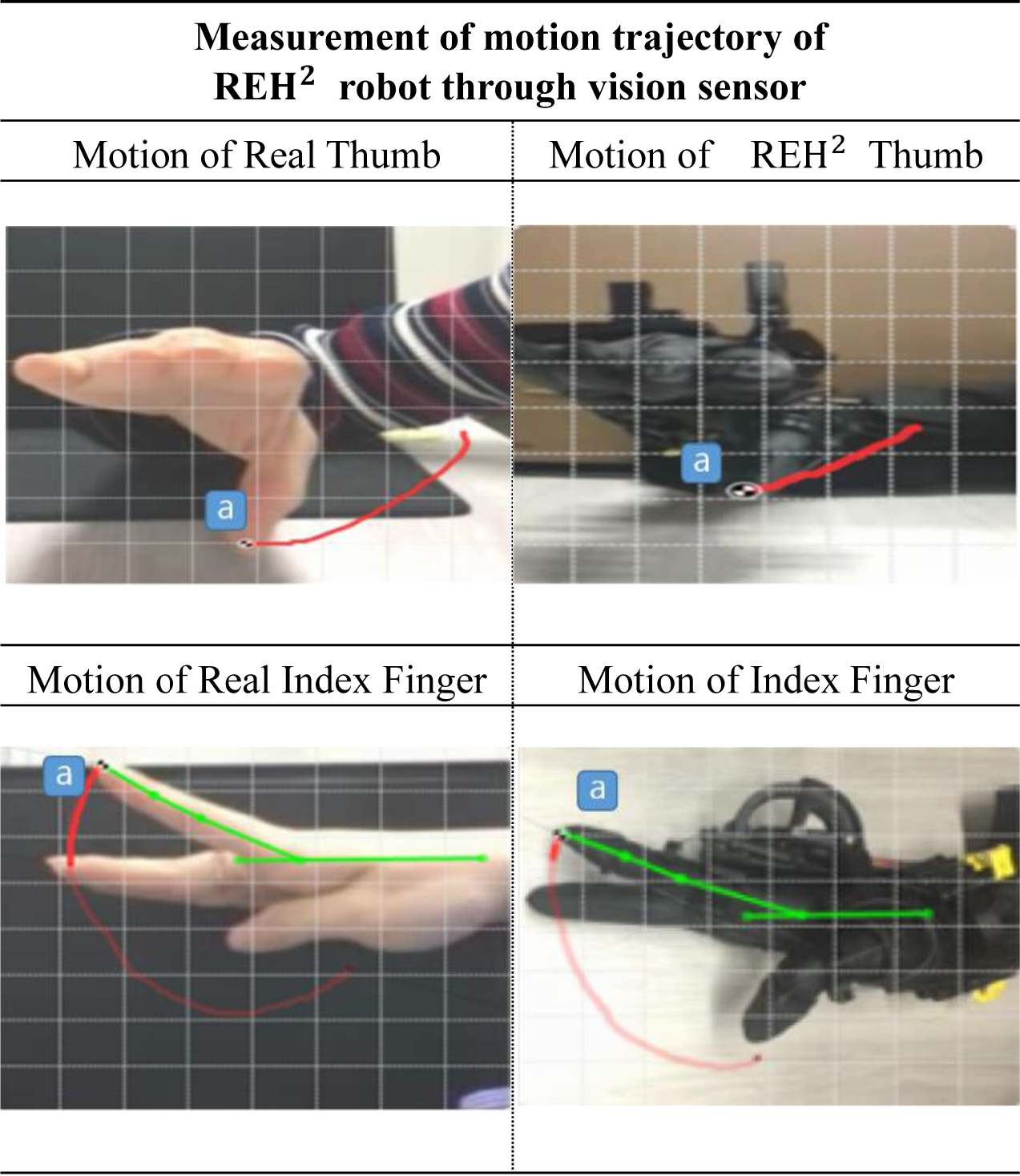
본 연구에서는 제작된 휴대용 핸드 외골격 로봇의 성능 검증을 위해 모션 캡쳐 프로그램인 Kinovea를 사용하여 착용자의 손가락 운동 궤적을 측정하였다.
13,15 그 방법으로는 실제 사람의 엄지 손가락과 검지 손가락의 운동 궤적을 먼저 측정하고 그 후에 제작된 핸드 외골격 로봇을 사람이 직접 착용하여 로봇의 힘만으로 손가락을 움직였을 때의 운동 궤적을 측정하여 서로 비교하였다. 각 실험의 운동 궤적 측정 조건은 손가락 끝 지점 부분에 임의의 점 a를 선정하고 손가락이 움직일 때의 a의 이동거리를 측정하였다.
추가적인 실험으로 앞의 3장에서 언급되었던 파지력 테스트를 진행하였다. 파지력 테스트를 위해서 임의의 물체들을 선정하고 해당 물체 표면에 압력 센서를 부착하였다. 테스트를 위해 압력 센서가 부착된 물체를 실험자가 ReH2를 손에 착용하여 파지하는 형태로 진행 되었으며, 이 때 ReH2를 착용한 실험자는 물체를 파지 할 때 자신의 손가락 힘을 발생시키지 않는 것으로 하였다.
4.2 결과
앞에서 언급한 측정 방법을 토대로
Fig. 12와 같이 실험을 진행하여 비교하였다.
Fig. 12에서와 같이 실제 검지 손가락의 Abduction/Adduction 운동 궤적과 로봇을 착용했을 때의 운동궤적이 비슷한 것을 확인할 수 있다. 또한 검지 손가락 역시 실제 손가락의 Flexion/Extension 운동 궤적과 로봇을 착용했을 때의 운동 궤적이 흡사한 것을 알 수 있었다. 또한 추가적으로 진행한 파지력 테스트에 대한 결과 값을
Figs. 13과
14를 통해 확인할 수 있다.
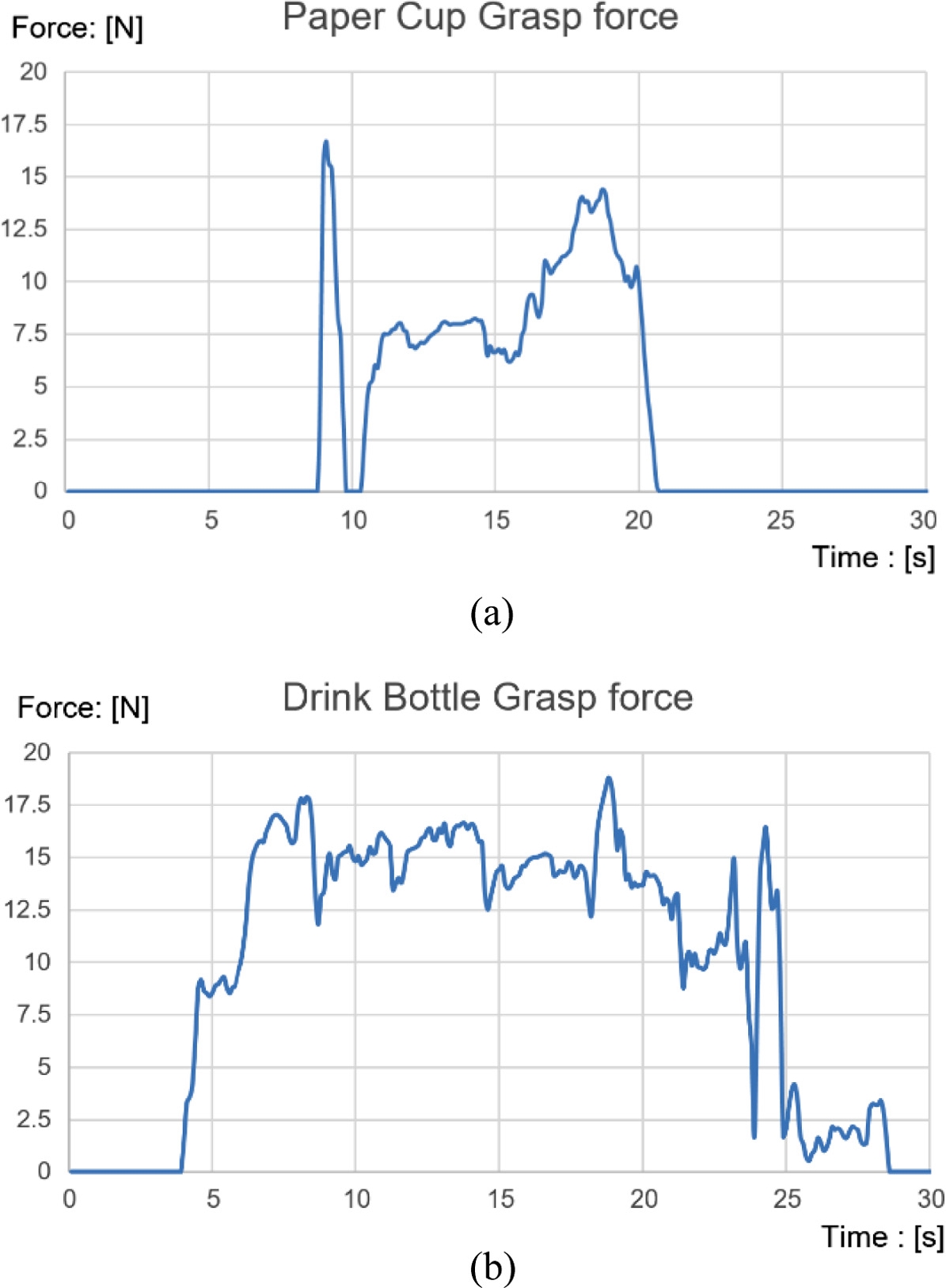
Fig. 13의 경우 손 동작 중 Grasp에 대한 파지력 테스트 이다.
Fig. 13(a)의 경우 종이컵을 목표 물체로 설정하였고 ReH
2을 통해 파지하였을 때 발생되는 힘은 최대 13N정도 되었다.
Fig. 13(b)의 경우는 음료수 병을 목표 물체로 설정하였고 평균적으로 15 N의 파지력이 발생된 것을 확인할 수 있다.
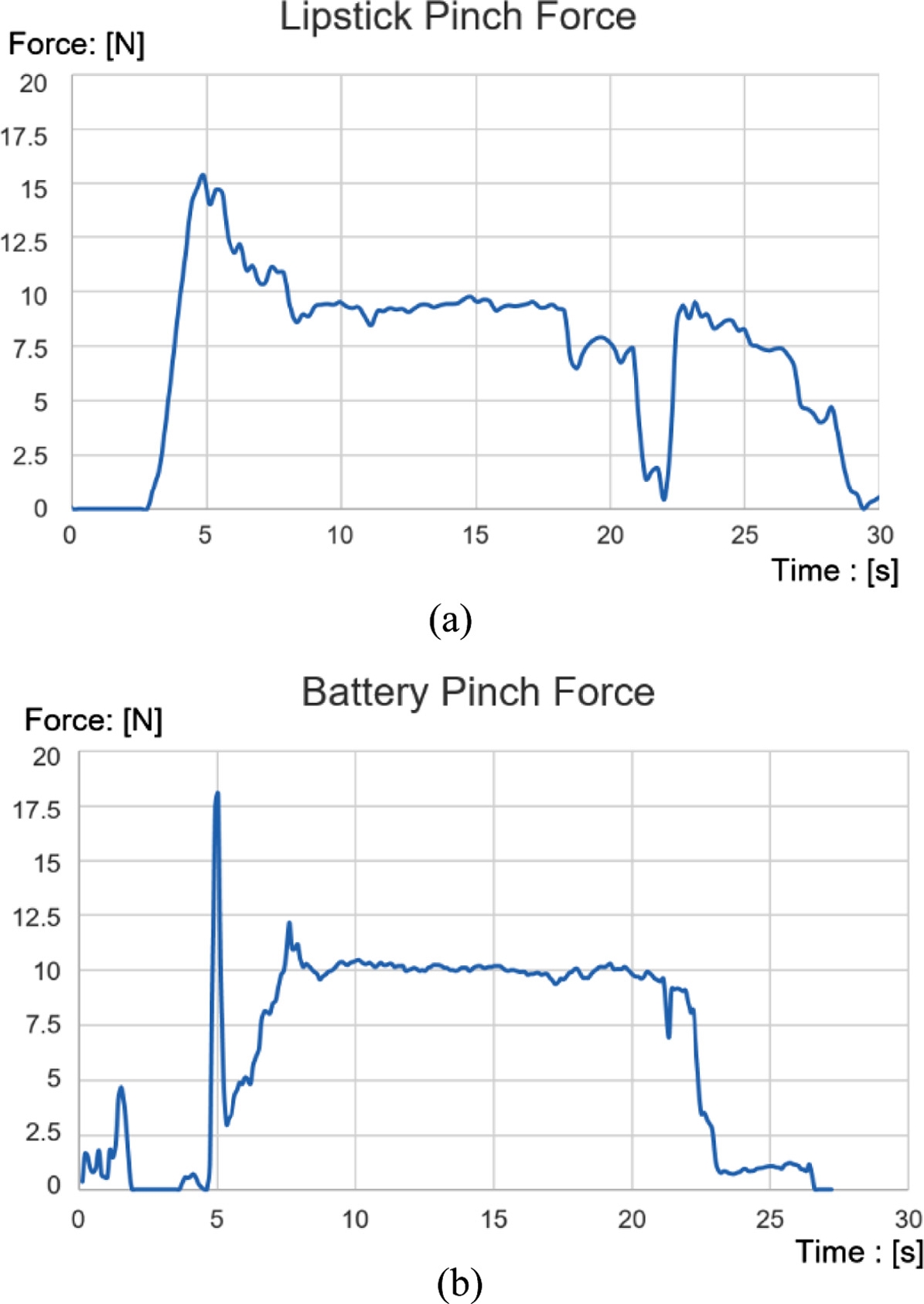
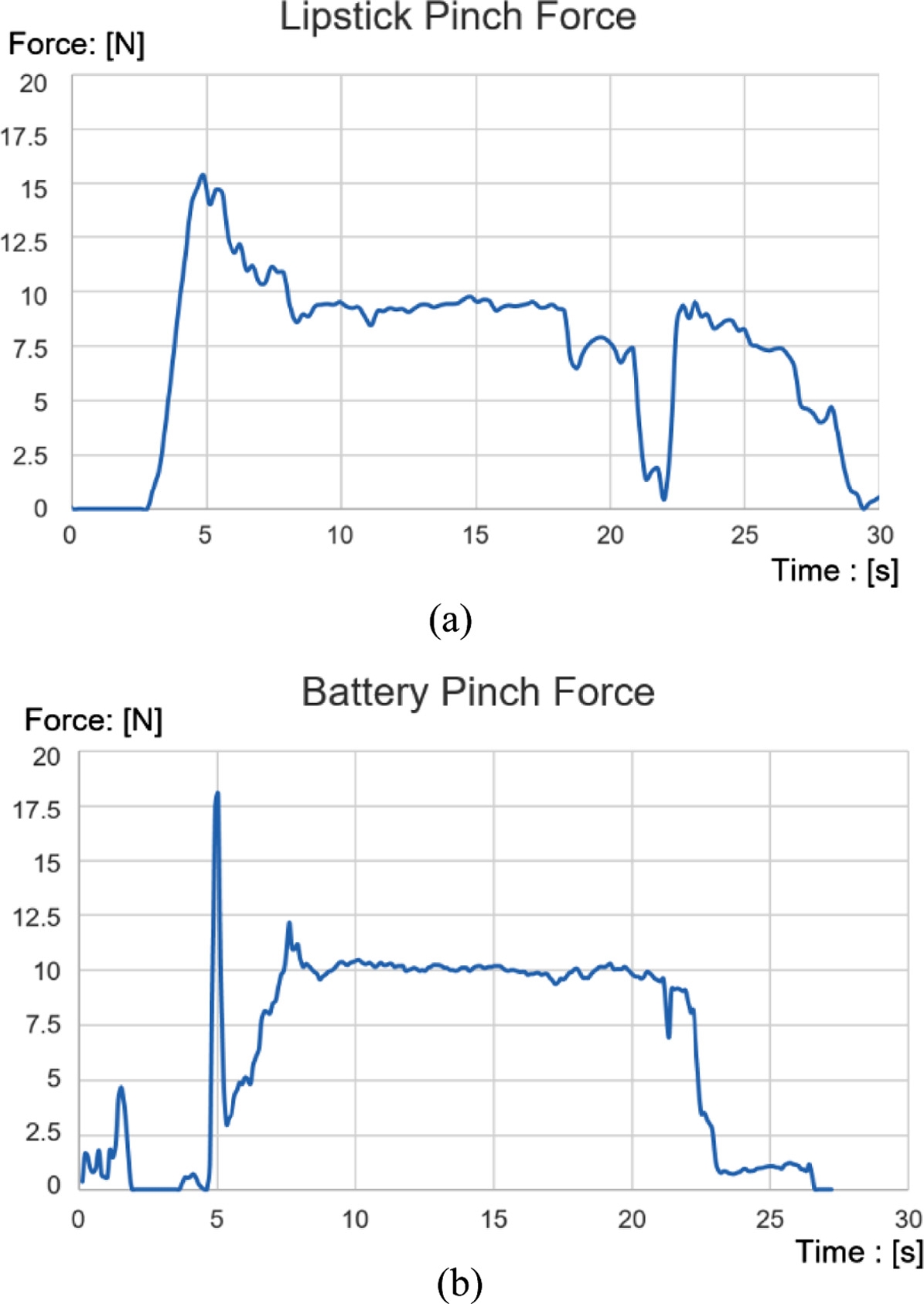
Fig. 14의 경우는 손 동작 중 Pinch 동작에 대한 테스트 이다.
Fig. 14(a)의 경우는 립스틱을 목표 물체로 정하였고 평균적으로 약 10 N의 파지력이 발생하였고, 보조배터리를 목표 물체로 설정한
Fig. 14(b)의 경우도 비슷한 힘이 발생 된 것을 확인할 수 있다.
Fig. 12Comparison of motion trajectories of real persons and ReH2 measured by motion capture system
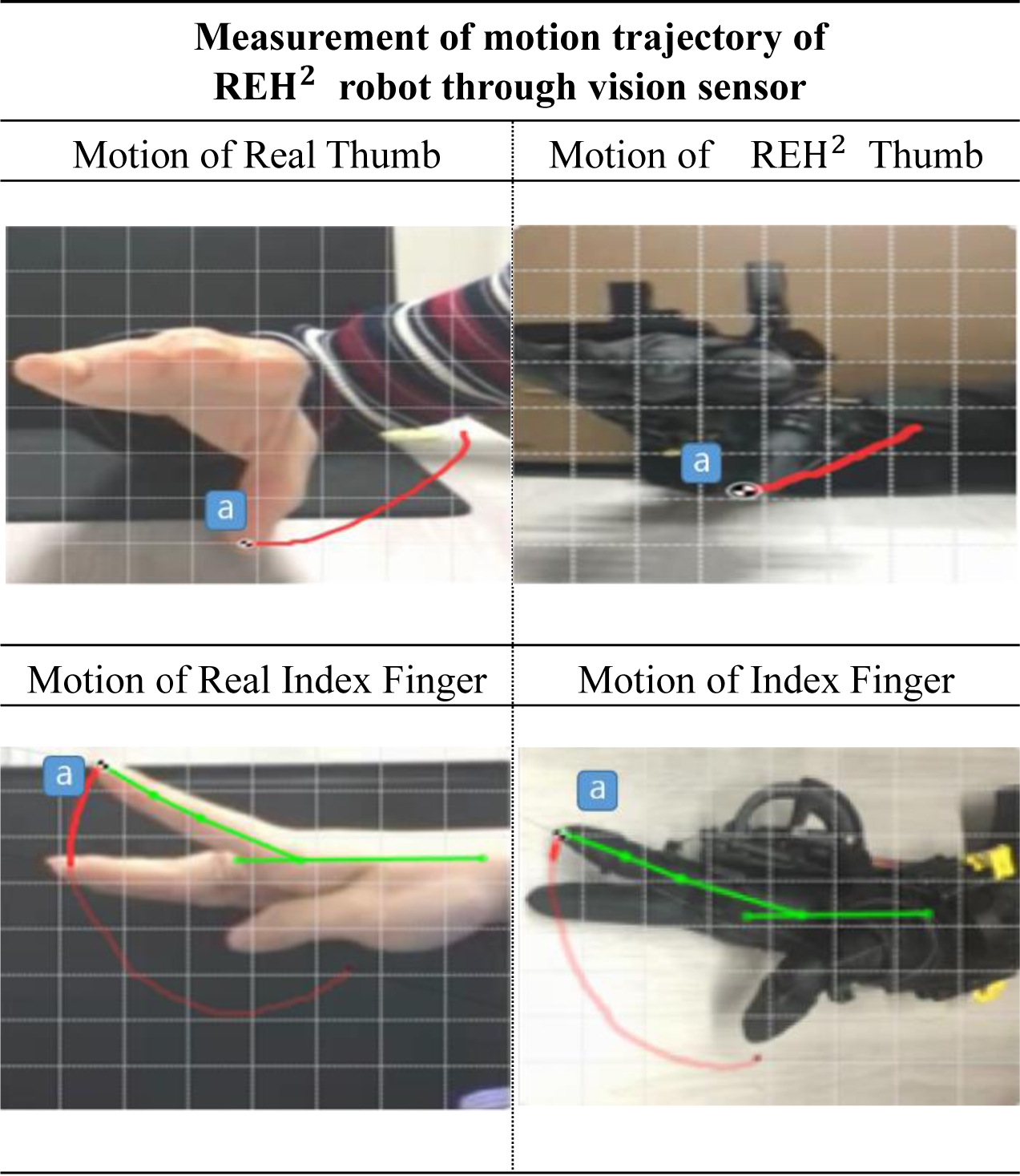
Fig. 13The Grasp force generated when the Re wearer held the lipstick and the battery was measured and plotted
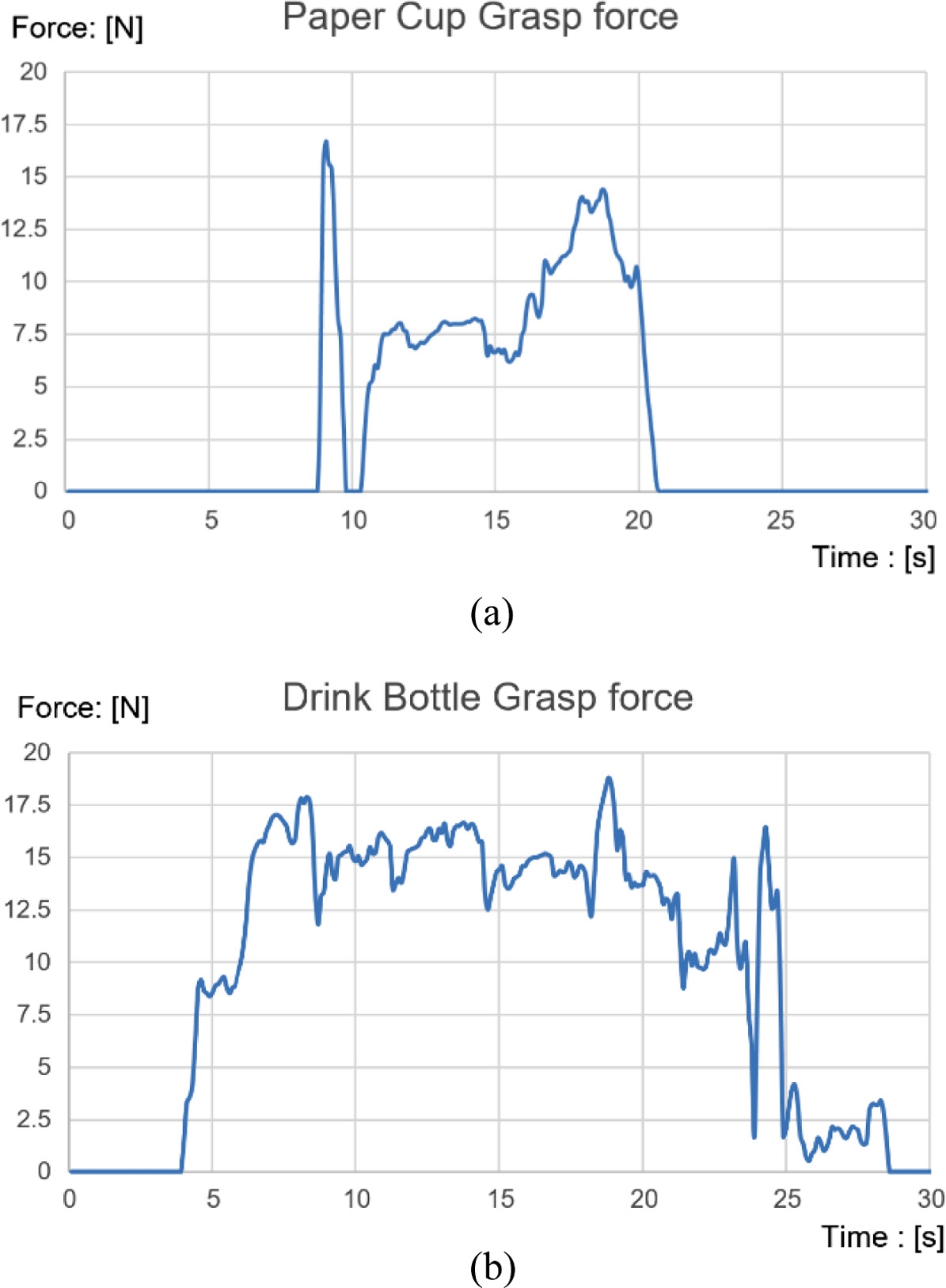
Fig. 14The Pinch force generated when the RE wearer held the notebook and wallet was measured and graphed
ReH2는 파지력 테스트를 통해 앞의 3장에서 언급한 ADL 보조를 위한 목표 힘인 10N을 만족하는 것을 알 수 있었다. Grasp 동작과 Pinch 동작의 측정된 파지력의 힘이 약간의 차이를 보이며, 이러한 이유는 파지 동작 특성 및 동작에 적용되는 모터들의 차이에 영향을 받게 된다.
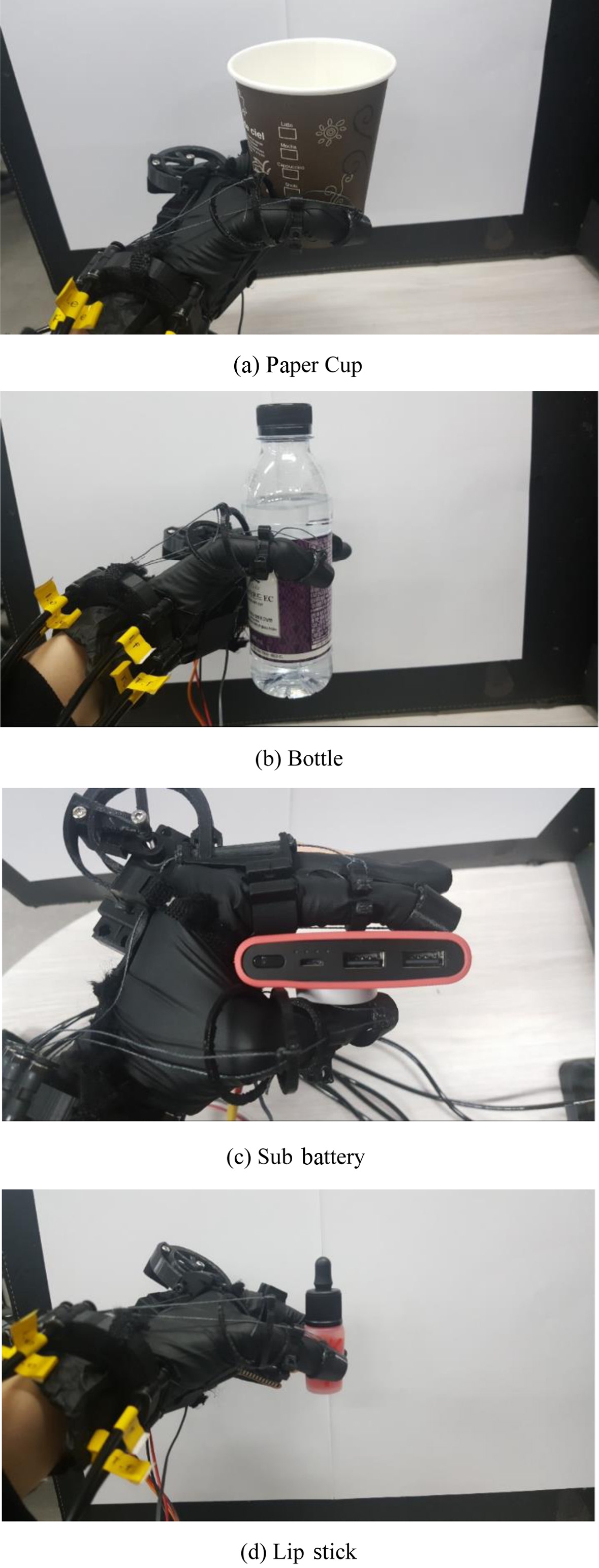
본 연구는 마비 환자와 같이 손을 움직이지 못 하거나 근력이 부족한 노약자에게 직접적인 도움을 줄 수 있는 휴대용 핸드 외골격 로봇을 개발하였다.
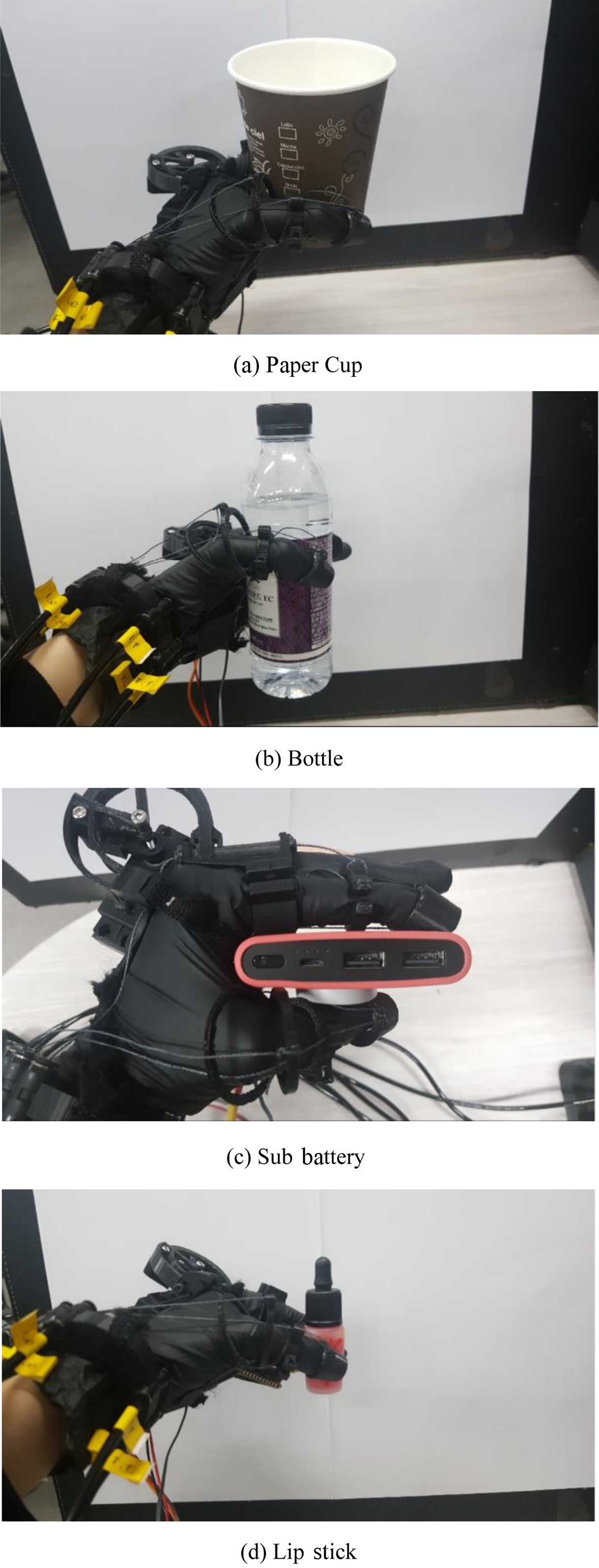
Fig. 15를 보면 일상생활에서 사용되는 물품들에 실제 파지 테스트를 진행한 모습을 확인할 수 있으며 대부분 안정적인 상태를 가지고 있다. ReH
2는 기존의 핸드 외골격 로봇들과 다르게 Grasp 동작을 포함하여 분절 구동 개념을 통해 손의 Pinch 동작까지 가능하게 하였다.
Fig. 15Use ReH2 robot to Real test items used in ADL hand gesture are grasp and pinch and are stable
차 후의 연구로는 로봇 제어 연구를 통해 물건에 대한 파지를 센서 없이 판단할 수 있는 핸드 외골격 로봇 전용 센서리스 제어 기법을 개발하여 과도한 모터의 토크 유입을 방지할 것이며, 추가 적으로 마비 환자가 ReH2의 동작을 쉽게 제어할 수 있는 CHRI (Cognitive Human Robot Interaction) 개념을 적용시켜 착용자의 편의성과 안전성을 높일 것이다.
REFERENCES
- 1.
Margaret, C., “International Perspectives on Spinal Cord Injury,” World Health Organizaion, 2013.
- 2.
- 3.
Heo, P., Gu, G. M., Lee, S. J., Rhee, K., and Kim, J., “Current Hand Exoskeleton Technologies for Rehabilitation and Assistive Engineering,” International Journal of Precision Engineering and Manufacturing, Vol. 13, No. 5, pp. 807-824, 2012.
10.1007/s12541-012-0107-2
- 4.
Nycz, C. J., Bützer, T., Lambercy, O., Arata, J., Fischer, G. S., et al., “Design and Characterization of a Lightweight and Fully Portable Remote Actuation System for Use with a Hand Exoskeleton,” IEEE Robotics and Automation Letters, Vol. 1, No. 2, pp. 976-983, 2016.
10.1109/LRA.2016.2528296
- 5.
Kang, B. B., Lee, H., In, H., Jeong, U., Chung, J., et al., “Development of a Polymer-based Tendon-Driven Wearable Robotic Hand,” Proc. of the IEEE International Conference on Robotics and Automation, pp. 3750-3755, 2016.
10.1109/ICRA.2016.7487562
- 6.
Popov, D., Gaponov, I., and Ryu, J. H., “Portable Exoskeleton Glove with Soft Structure for Hand Assistance in Activities of Daily Living,” IEEE/ASME Transactions on Mechatronics, Vol. 22, No. 2, pp. 865-875, 2016.
10.1109/TMECH.2016.2641932
- 7.
Lynete, A. J. and Susan, J. L., “Human Hand Function,” Oxford University Press, 2006.
- 8.
Christine, A. M., “Anatomy of the Hand,” Physical Therapy, Vol. 69, No. 12, pp. 1007-1013, 1989.
10.1093/ptj/69.12.1007
- 9.
- 10.
Hollister, A. and Giurintano, D. J., “Thumb Movements, Motions, and Moments,” Journal of Hand Therapy, Vol. 8, No. 2, pp. 106-114, 1995.
10.1016/S0894-1130(12)80307-3
- 11.
Feix, T., Romero, J., Schmiedmayer, H. B., Dollar, A. M., and Kragic, D., “The Grasp Taxonomy of Human Grasp Types,” IEEE Transactions on Human-Machine Systems, Vol. 46, No. 1, pp. 66-77, 2015.
10.1109/THMS.2015.2470657
- 12.
- 13.
Smaby, N., Johanson, M. E., Baker, B., Kenney, D. E., Murray, W. M., et al., “Identification of Key Pinch Forces Required to Complete Functional Tasks,” Journal of Rehabilitation Research and Development, Vol. 41, No. 2, pp. 215-224, 2004.
10.1682/JRRD.2004.02.0215
- 14.
Arata, J., Ohmoto, K., Gassert, R., Lambercy, O., Fujimoto, H., et al., “A New Hand Exoskeleton Device for Rehabilitation Using a Three-Layered Sliding Spring Mechanism,” Proc. of the IEEE International Conference on Robotics and Automation, pp. 3902-3907, 2013.
10.1109/ICRA.2013.6631126
- 15.
Biography
- Seung Chan Lee
Ph.D. candidate in the Department of Mechatronics Engineering, Hanyang University. His research interest is Wearable & Rehabilitation Robots
- Da Yeon Lee
M.D. in the Department of Mechatronics Engineering. Hanyang University. Her research interest is Wearable & Rehabilitation Robots
- Nam Ju Kim
M.D. in the Department of Interdisciplinary Engineering Systems. Hanyang University. Her research interest is Wearable & Rehabilitation Robots
- Seung Hoon Hwang
Ph.D. candidate in the Department of Mechatronics Engineering, Hanyang University. His research interest is Wearable & Rehabilitation Robots
- Dong Bin Shin
Ph.D. candidate in the Department of Mechatronics Engineering, Hanyang University. His research interest is Wearable & Rehabilitation Robots
- Chang Soo Han
Professor in the Department of Robotics Engineering, Hanyang University. His research interest is medical service robot, future combat robot, filed robot, wearable robot, path planning, and construction automation robot