ABSTRACT
This paper proposes a myoelectric hand prosthesis with an easy control strategy to apply more conveniently with just two EMG sensors. The myoelectric hand prosthesis is composed of a multi-DOF finger mechanism, a controller, and an intuitive control algorithm. The developed hand prosthesis has 6-DOFs and can perform eight hand motions using the intuitive control algorithm. The proposed intuitive control algorithm classifies four grip motions and four gesture motions; we used the thumb position of the hand prosthesis and three EMG signals (Co-contraction, flexion, and extension) generated from the two EMG sensors. From the experimental results, we demonstrated that the proposed myoelectric hand prosthesis is applicable to amputees as a hand prosthesis.
-
KEYWORDS: Multi-DOF, Myoelectric hand prosthesis, Intuitive algorithm, Hand gesture, Grip motion
-
KEYWORDS: 다자유도, 근전전동의수, 직관적 알고리즘, 손동작, 파지 동작
1. 서론
인간의 손은 물건을 파지하는 동작 외에 다양한 손동작을 통해 자신의 감정뿐만 아니라 의사를 표현하는 수단으로도 사용되기 때문에 상지가 절단된 장애인의 경우, 손의 결손으로 인하여 일상생활에서 많은 불편함을 겪고 있다.
1 기존에 개발된 미관형 의수의 경우, 사람의 형상과 매우 유사하나 단순한 파지 기능도 구현하지 못하고, 몸체 구동형 타입의 경우, 단순 파지 동작을 구현하기 위해서는 더 큰 몸동작을 발생시키기 때문에 일상생활에서 사용하기에는 많은 애로사항이 있다. 그래서 부가적인 추가 장치 없이 절단 부위의 잔존 근육에서 발생하는 근전도(Electromyogram) 신호를 사용하여 쉽고 안전하게 물체를 파지할 수 있는 근전전동의수(Myoelectric Hand Prosthesis)가 1987년 Ottobock (MYO Hand
2)에서 개발되어 지금까지 많은 상지 절단 장애인들이 사용하고 있다.
이 손은 굽힘과 폄 동작을 이용하여 다양한 물건을 파지할 수 있지만, 하나의 구동기를 사용하기 때문에 자유도(Degree of Freedom)가 낮아 사람 손과 같이 다양한 손동작을 구현할 수 없다. 그래서 2006년 Ossur (Touchbionics)의 I-Limb Hand
3을 시작으로 손가락 마디 또는 손바닥 내부에 4개 이상의 구동기를 장착한 다자유도 근전전동의수(Multi-DOF Myoelectric Hand Prosthesis)가 개발되고 있다.
2-6 이 손들은 높은 자유도를 이용하여 사람 손과 같이 다양한 손동작 및 파지 동작을 구현할 수 있다. 하지만 이러한 다자유도 근전전동의수는 기존의 세 손가락 타입의 근전전동의수에 적용되는 두 개의 근전도 신호를 이용하여 만들어지는 제어 알고리즘을 사용하기 때문에
7,8 다양한 손동작과 파지 동작을 구현하기 위한 제어 명령을 만들기 어렵고, 또한 구현하더라도 시간 지연과 방법이 부자연스러워 일상생활에 적용하기에는 많은 불편함이 있다.
이러한 문제점을 해결하기 위해 많은 연구자들은 보다 많은 제어 신호를 확보하여 다양한 동작을 구현하기 위한 다채널기반의 근전도 패턴 인식(Myoelectric Pattern Recognition, MPR) 방법에 대한 연구를 진행하였다.
9-16 Hudgins
9 연구팀은 세 개의 근전도 신호로부터 비선형변환비교학습(Self-Organizing Feature Map)과 다층신경망(MuLtilayer Perceptron, MLP)을 적용한 MPR을 이용하여 8가지 손동작을 구현하였고, Englehart
10 연구팀은 네 개의 근전도 신호로부터 선형변환비교학습(Principal Component Analysis)과 베이지안 분류기(Bayesian Classifier)를 적용한 MPR을 이용하여 6가지 손동작을 구현하였다. 그리고 Chu
11 연구팀은 시간-주파수 해석 방법인 웨이블렛 패킷 변환(Wavelet Packet Transform, WPT)와 선형변환교사학습(Linear Discriminant Analysis, LDA)-MLP 구조를 가진 MPR을 이용하여 4자유도를 가진 근전전동의수를 시간지연 없이 자연스럽게 제어하였다. 이 연구팀들은 높은 인식률을 가진 MPR을 개발하여 다양한 손동작을 구현할 수 있는 제어 명령을 만들었지만, 많이 남아있지 않은 근육 상태와 실제 다양한 잔존 근육 형태의 상지 절단 장애인들에게 적용하기 어렵다. 일부 다른 연구팀은 개발된 MPR
12-16을 상지 절단 장애인들에게 적용하여 다자유도 근전전동의수의 제어 가능성을 확인하였으나, 근전전동의수를 사용하는 절단자 대부분이 단단부가 짧아 제어에 적용할 수 있는 근전도 신호 수가 작아 세 개 이상의 근전도 센서를 단단부에 적용하기 어려우며, 또한 다양한 절단 부위를 가진 상지 절단 장애인들이 사용하기에는 어려움이 있다. 그래서 Bebionic Hand
2와 I-Limb Hand
3를 개발한 제조사들은 휴대전화의 애플리케이션과 특정 개체에 부착하여 사용하는 코인 형태의 소형 칩등 다양한 방법으로 의수를 제어할 수 있는 인터페이스를 제안하였으나, 실제 현실생활에서 대부분 대화 중에 일어나므로 버튼을 누르거나, 앱을 사용할 경우, 대화의 흐름을 끊기 십상이기 때문에 일상생활에 사용하기에는 불편한 현실이다.
본 연구에서는 기존의 근전전동의수 사용자(세 손가락 타입 근전전동의수)가 추가적인 장치나 다른 제어 신호를 발생시키는 훈련 과정 없이 두 개의 근전도 센서에서 발생하는 세 개의 근전도 제어 신호만으로 일생생활에서 편리하게 사용할 수 있는 다자유도 근전전동의수를 제안하고자 한다. 제안된 다자유도 근전전동의수는 2자유도를 가진 엄지를 포함한 5개의 손가락을 가지고 있으며, 5축 모터 드라이버가 장착된 제어기 그리고 손동작 및 파지 동작을 구현할 수 있는 직관적 제어 알고리즘으로 구성되어 있다. 직관적 제어 알고리즘은 개발된 다자유도 근전전동의수가 기존 두 개의 근전도 신호에서 발생하는 세 개의 제어 명령을 이용하여 다양한 손동작 및 파지 동작을 구현하는 방법이며, 본 연구에서는 제안된 직관적 제어 알고리즘의 타당성을 입증하기 위해 개발된 다자유도 근전전동의수에 제어 알고리즘을 적용하여 4개의 손동작과 4개의 파지 동작을 구현하였다.
본 논문의 구성은 다음과 같다. 2장에서는 개발한 다자유도 근전전동의수와 제어기에 대하여 설명한다. 3장에서는 개발된 다자유도 근전전동의수를 쉽고 효율적으로 사용할 수 있는 직관적 제어 알고리즘에 대하여 설명하며, 4장에서는 직관적 제어 알고리즘을 적용한 실험 결과를 보인다. 실험 결과로부터 본 연구에서 제안한 다자유도 근전전동의수가 상지 절단 장애인에게 적용할 수 있음을 보인다.
2. 다자유도 근전전동의수 개발
2.1 다자유도 근전전동의수
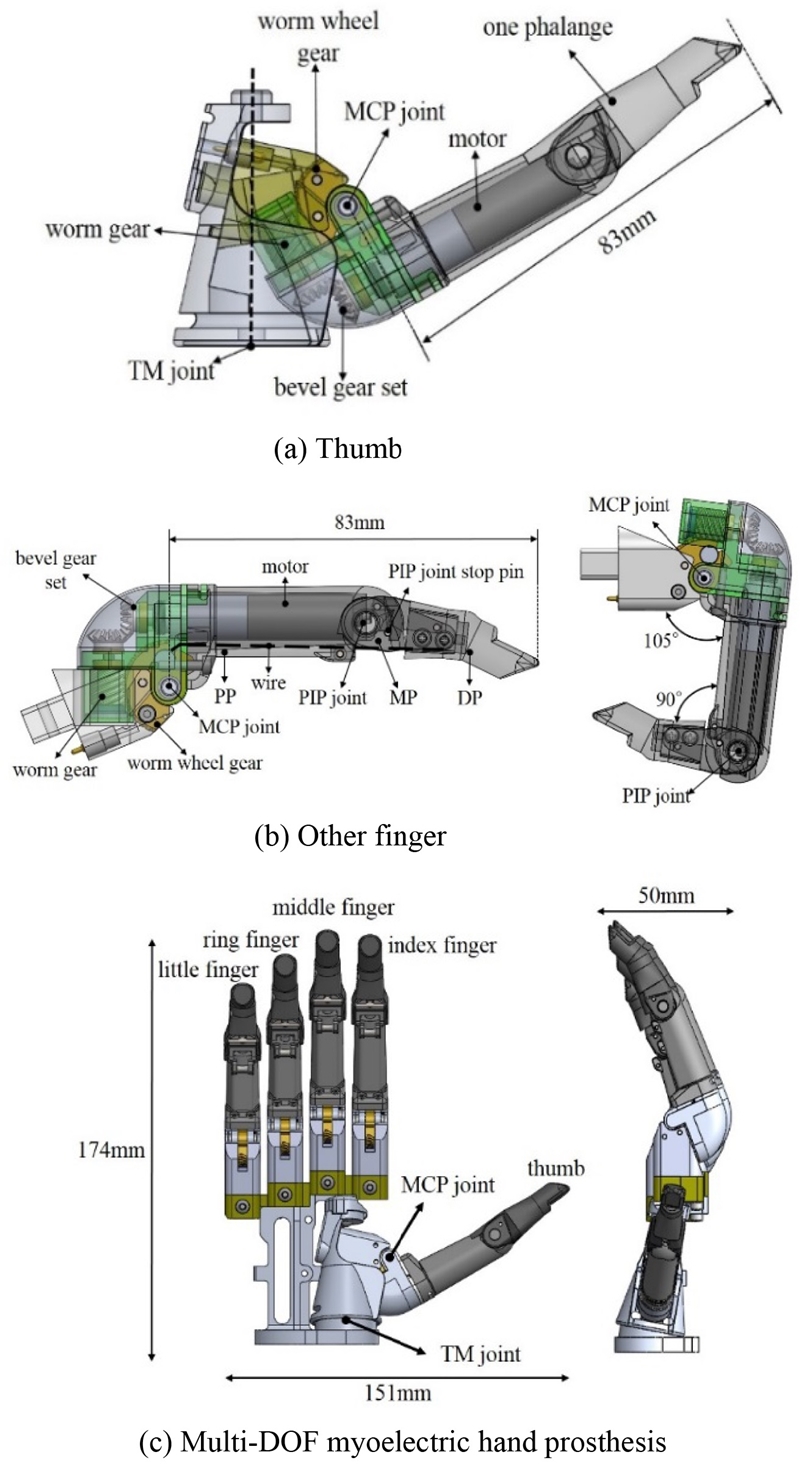
본 연구에서는 사람 손가락의 해부학적 구조와 동작 메커니즘을 모방하여 다자유도 근전전동의수용 손가락을 설계하였다. 설계된 손가락은 엄지와 나머지 손가락으로 나눌 수 있다. 엄지는
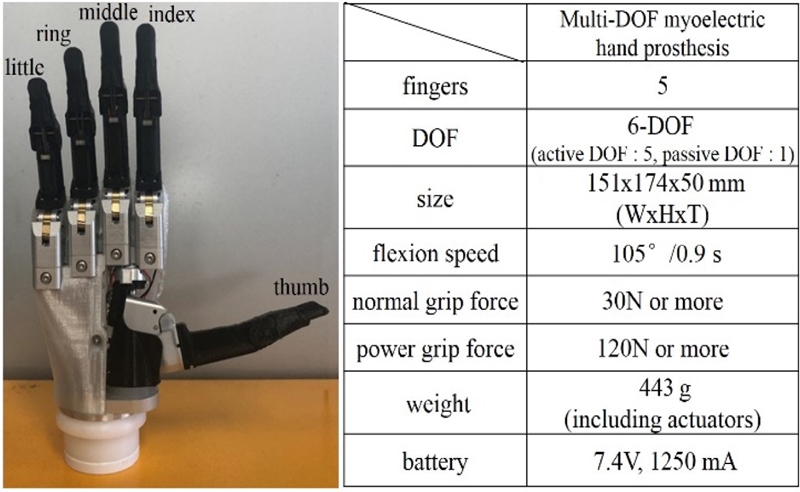
Fig. 1(a)와 같이 하나의 마디로 구성되어 있으며, 관절은 중수지절관절(MetaCarpoPhalangeal Joint, MCP Joint)과 대다각 중수관절(TrapezopMetacarpal Joint, TM Joint)로 구성되어있다. 나머지 손가락은 말절골(Distal Phalange, DP), 중절골(Middle Phalange, MP), 그리고 기절골(Proximal Phalange, PP)로 구성되어 있으며, 관절은 근위지절간관절(Proximal InterPhalangeal Joint, PIP Joint)와 MCP Joint로 구성되어 있다(
Fig. 1(b) 참조). 설계된 손가락의 길이는 사람 손가락 길이를 고려하여 DP 마디 끝단에서 MCP Joint의 중심까지 총 83 mm로 설계하였다.
Fig. 1Design of multi-DOF myoelectric hand prosthesis
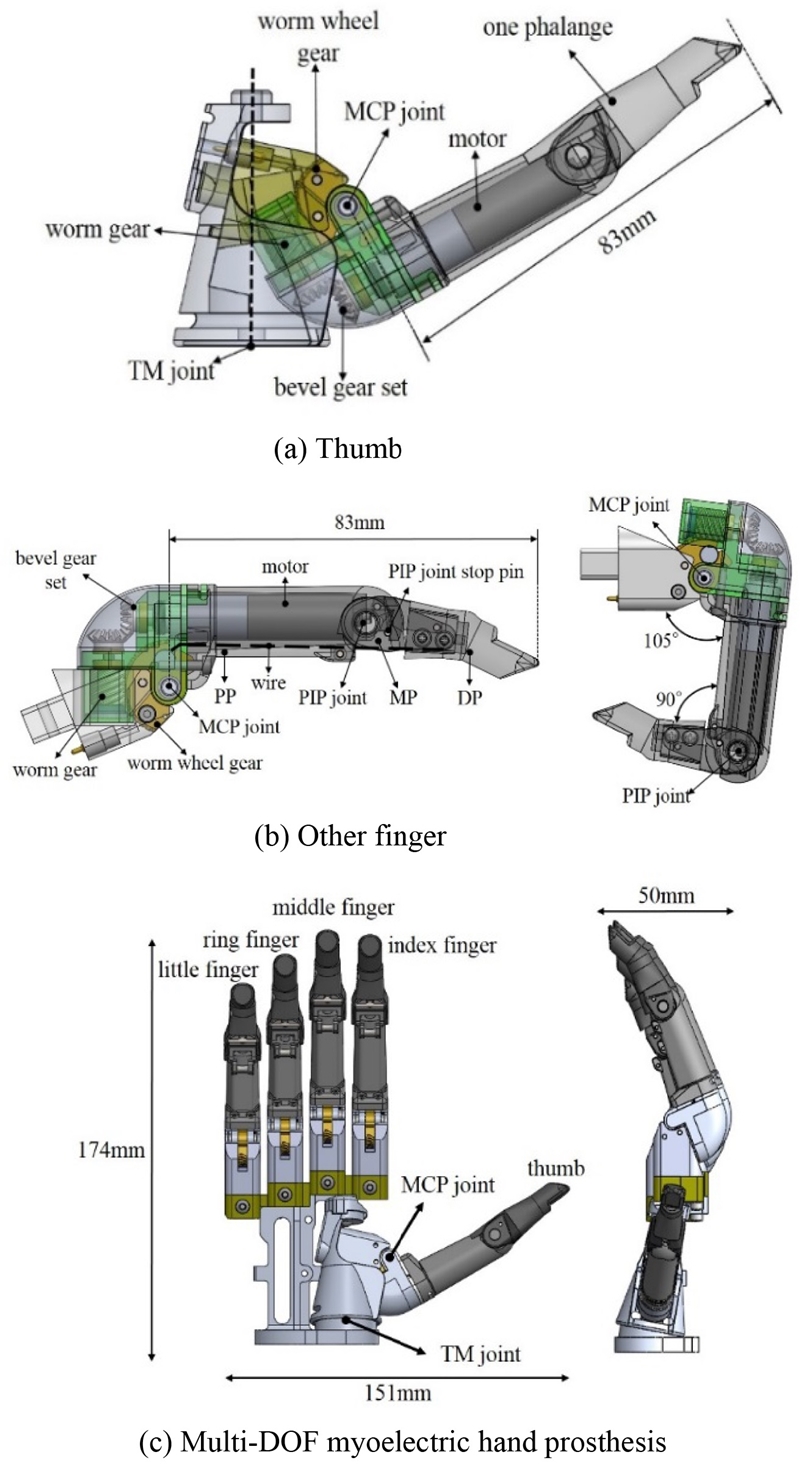
본 연구에서 설계된 손가락은 사람 손가락의 동작 메커니즘을 모방하였다. 사람 손가락의 굽힘과 폄 동작은 근육의 수축·이완 시 마디에 고정되어 있는 건의 당김에 의해 구현된다. 따라서 우리는 근육으로 모터를 사용하였으며, 건으로는 와이어를 사용하였다. 각 손가락이 독립적으로 굽힘 동작을 구현하기 위해 모터는 각 손가락 PP 내부에 장착하였다. 그리고 와이어는 윔휠기어와 MP에 고정하였다. 설계된 손가락의 굽힘 동작은 모터 구동 시 웜휠기어에 고정되어 있는 와이어를 당김으로써 구현된다. 손가락의 PP는 모터-베벨기어-웜기어에 의해 MCP Joint에서 105°까지 굽혀지며(
Fig. 1(b) 참조), 이때 웜휠기어에 고정되어 있는 와이어가 당겨져 MP와 DP는 90°까지 PP와 동시에 굽혀진다. 그리고 손가락의 폄 동작은 PP와 MP사이에 장착되어있는 복원 스프링(Restoring Spring)에 의해 구현된다. 엄지는 굽힘과 폄 그리고 회전 동작을 구현할 수 있다. 엄지의 굽힘과 폄 동작은 모터-베벨기어-웜기어에 의해 MCP Joint에서 구현되며, 회전 동작은 손바닥에 장착되어 있는 TM Joint에 의해 수동(Manually)으로 구현된다.
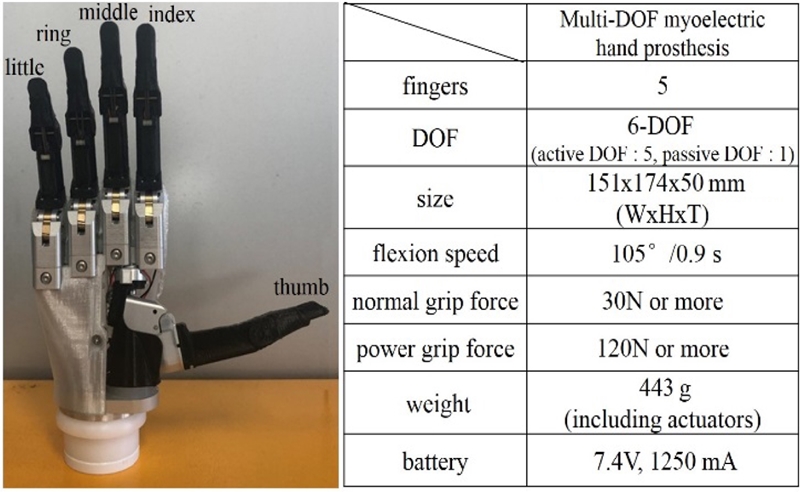
사람 손은 22자유도를 가지고 있으며, 무게는 400 g 정도이다.
17본 연구에서 설계된 손은 사람 손과 형상이 유사하며, 크기는 151 × 174 × 50 mm (W × L × T)이다(
Fig. 1(c) 참조).
Fig. 2는 본 연구에서 개발된 다자유도 근전전동의수를 보여준다. 개발된 손은 다양한 손동작과 파지 동작을 구현하기 위해 독립적으로 움직이는 다섯 손가락을 가지고 있다. 손의 전체 자유도는 엄지의 Active MCP Joint에 의한 1자유도, Passive TM Joint에 의한 1자유도, 그리고 나머지 손가락 각각 Active MCP Joint에 의한 1자유도로 총 6자유도를 가지고 있으며, 손의 전체 무게는 구동기를 포함하여 443 g이다.
Fig. 2Developed multi-DOF hand prosthesis
2.2 다자유도 근전전동의수용 제어기
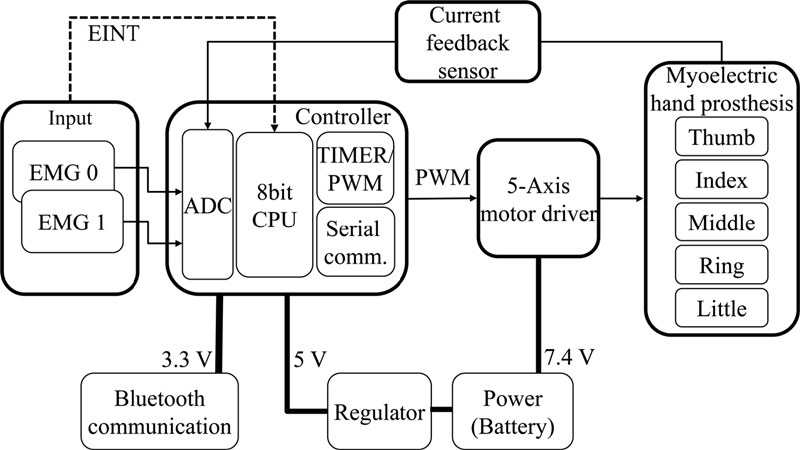
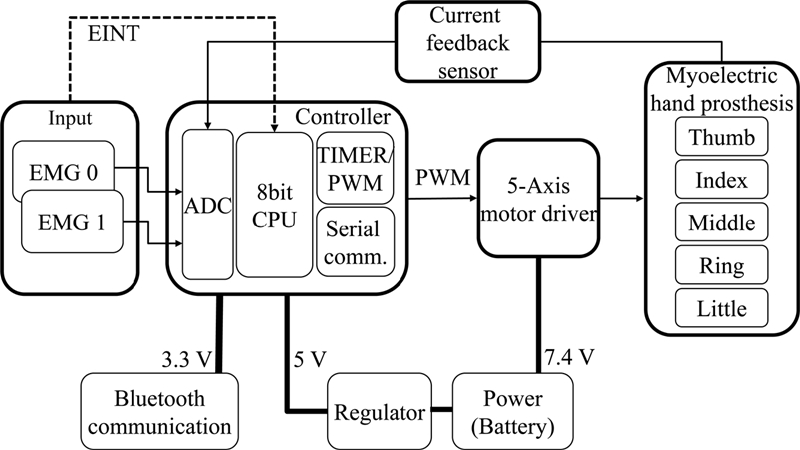
개발된 다자유도 근전전동의수는 엄지와 나머지 손가락의 마디 내부에 모터가 장착되어 있으며, 모터 구동 시 각 손가락은 굽힘 동작을 구현할 수 있다. 본 연구에서는 독립적으로 손가락 굽힘 동작을 구현하기 위해 5축 모터 드라이버를 가진 제어기를 설계하였다. 설계된 제어기는 근전도를 측정할 수 있는 근전도 센서 인터페이스, MCU, 모터 드라이버, 전류 피드백 센서, 배터리, 그리고 디버거를 위한 블루투스 통신으로 구성되어 있다(
Fig. 3 참조). 근전도 센서 인터페이스는 상지 절단 장애인의 잔존 근육에서 발생하는 2개의 근전도 신호를 검출할 수 있도록 설계하였으며, MCU는 8bit CPU를 사용하여 설계하였다. 모터 드라이버는 손가락을 독립적으로 제어하기 위해 5축으로 설계하였고, 전류 피드백 센서는 손가락 굽힘 시 발생하는 모터의 부하를 측정할 수 있도록 설계하였다. 배터리 전원은 7.4V이며, 배터리로부터 MCU로 들어가는 전원은 5 V, 블루투스 통신 전원은 3.3 V로 설계하였다.
Fig. 3Controller block diagram
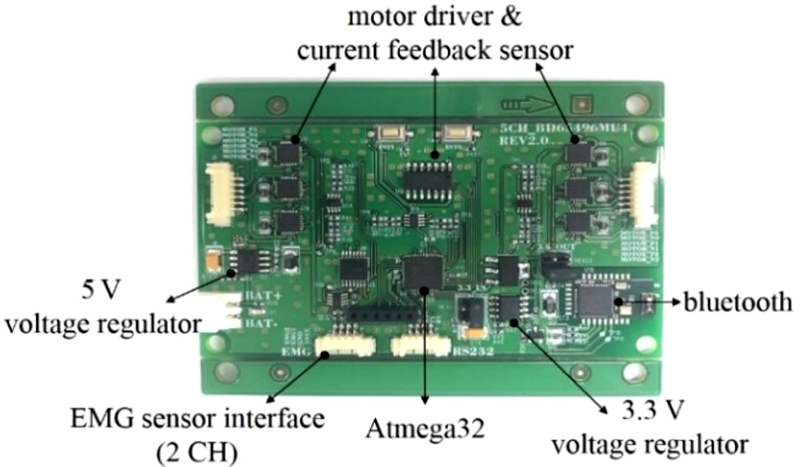
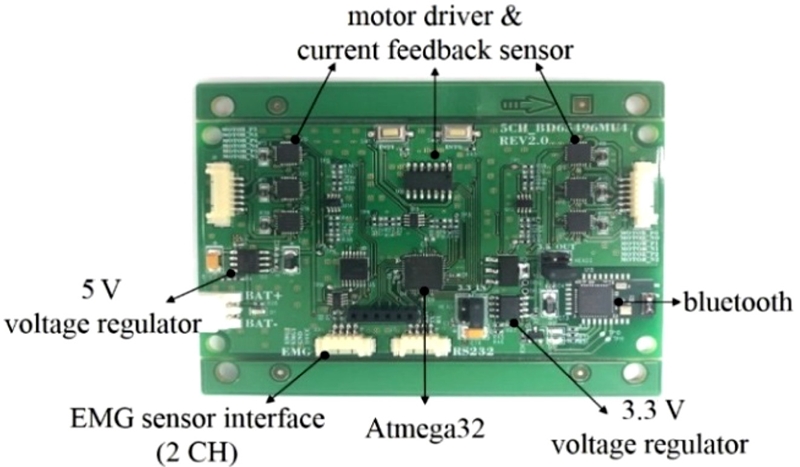
본 연구에서는
Fig. 3을 바탕으로 다자유도 근전전동의수용 제어기를 개발하였다(
Fig. 4 참조). 개발된 제어기는 마이크로컨트롤러 Atmega32를 사용하였으며, 근전도 신호 크기에 따라 5개의 모터를 독립적으로 제어할 수 있다. 또한 손가락 굽힘 동작 시 발생하는 모터의 부하를 피드백하여 개발된 의수의 손동작과 파지 동작을 제어할 수 있다.
Fig. 4Developed controller
3. 다자유도 근전전동의수 제어 방법
3.1 다자유도 근전전동의수의 굽힘 속도 및 파지력
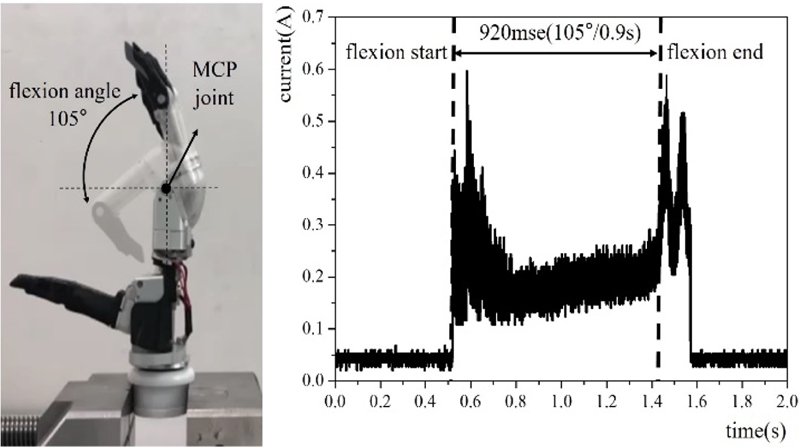
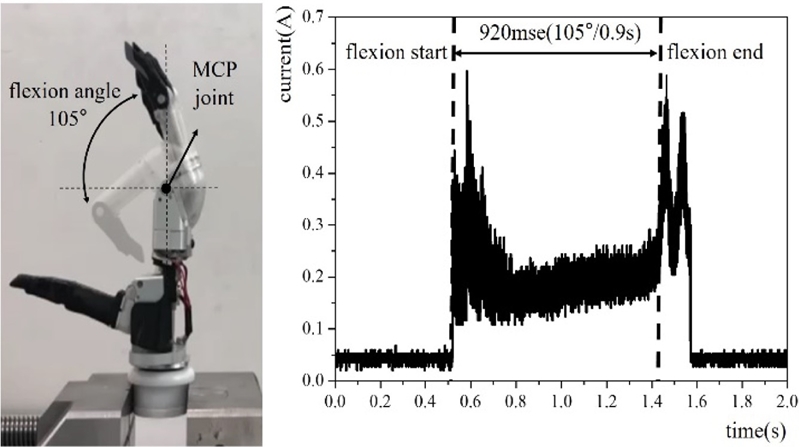
본 연구에서는 개발된 다자유도 근전전동의수와 제어기를 사용하여 손가락의 굽힘 속도, 그리고 파지력을 측정해 보았다. 근전전동의수 손가락의 굽힘 속도는 손동작 및 파지 동작을 구현하기 위한 중요한 요소이다. 따라서 본 연구에서는 손가락 마디 내부에 장착되어 있는 모터를 구동시켜 손가락의 굽힘 속도를 측정하였다. 손가락 굽힘 동작에 사용되는 모터는 펄스 폭 변조(Pulse Width Modulation, PWM) 방법에 의해 제어되며, 실험 결과 손가락의 굽힘 속도는 105°/920 msec인 것을 알 수 있었다(
Fig. 5 참조).
Fig. 5Finger flexion angle ROM and speed
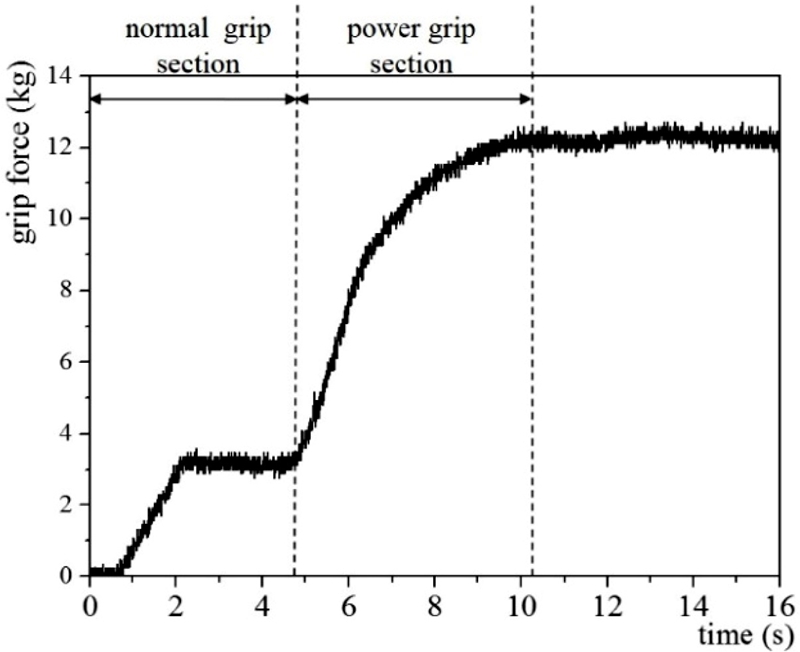
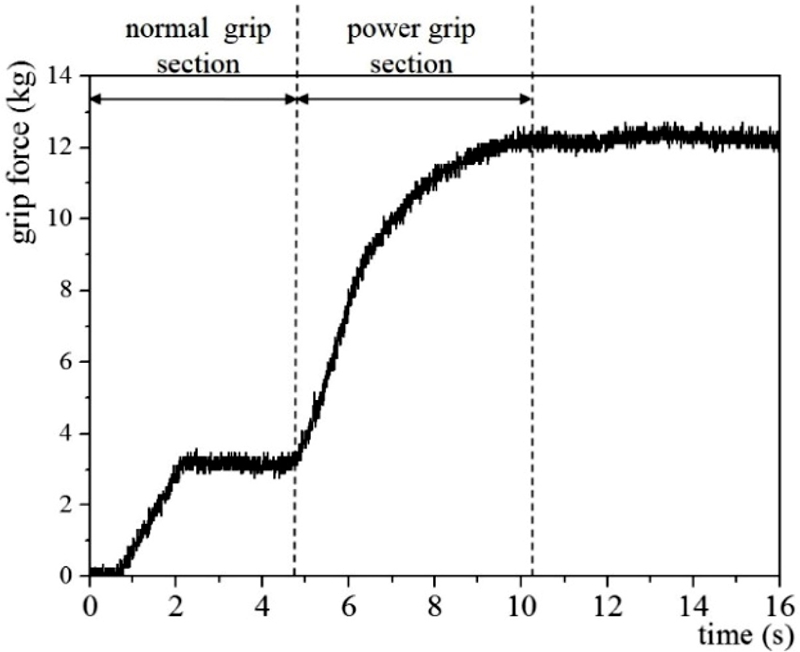
다자유도 근전전동의수는 파지력은 굽힘 속도와 같이 중요한 요소이다. 본 연구에서는 1250 mA 용량을 가지는 배터리를 사용하여 개발된 의수를 구동시키며, 의수 구동 시 배터리의 소모량을 줄이기 위해 파지 구간을 일반 파지 구간과 파워 파지 구간으로 나누었다. 일반 파지 구간에는 듀티비 0-90%까지 순차적으로 증가시키는 PWM 신호를 인가하였고, 파워 파지 구간에는 모터에 순간적으로 높은 전류 인가하기 위해 듀티비 90%를 가지는 PWM 신호를 인가하였다. 파워 파지 구간에서 순간적으로 높은 전류가 필요한 이유는 동력 전달용 웜기어의 역전 방지 특성을 이용하여 순간적으로 높은 전류를 인가할 때마다, 웜기어는 웜휠기어의 치면을 넘어가며, 이 때 역전 방지 특성에 의해 윔기어는 풀리지 않고, 의수의 파지력은 점차 증가한다. 파지력 측정 결과 일반 파지 구간에서는 30 N 이상의 파지력이 측정되었고, 파워 파지 구간에서 120 N 이상의 파지력이 측정되었다 (
Fig. 6 참조).
Fig. 6Grip force of the developed myoelectric hand prosthesis
3.2 동작 분류 방법
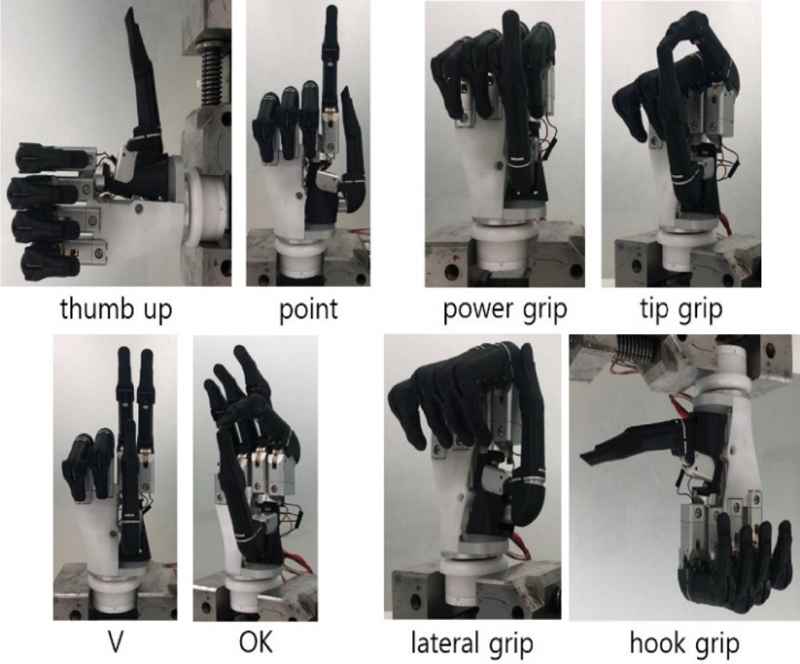
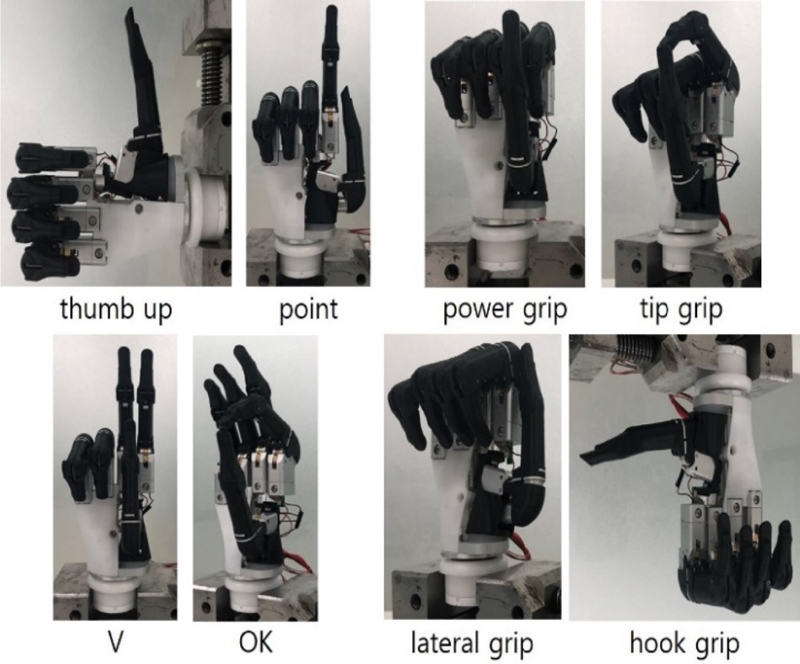
사람 손은 33개의 다양한 파지 동작을 구현할 수 있다.
18 본 연구에서 개발된 다자유도 근전전동의수는 6자유도를 이용하여일상생활에서 의사소통의 수단으로 사용할 수 있는 4개의 손동작 엄지 척(Thumb Up) 동작, OK 동작, 승리(Victory) 동작, 그리고 방향지시(Point) 동작을 구현해 보았으며, 대표 파지 동작
1중에서 파워 파지(Power Grip), 걸기(Hook Grip), 측면 파지(Lateral Grip), 손끝 파지(Tip Grip) 동작을 구현해보았다(
Fig. 7 참조).
Fig. 7Performed hand gestures and grip motions
근전전동의수는 상지 절단 장애인들의 결손된 손의 잔존 근육에서 발생하는 근전도 신호에 의해 제어된다. 그러나 절단 후 남아 있는 잔존 근육에서 발생하는 근전도 신호의 수는 매우 적기 때문에 상지 절단 절단 장애인들은 의수를 이용하여 다양한 손동작 및 파지 동작을 구현할 수 없다. 따라서 본 연구에서는 두 개의 근전도 신호만 사용하여
Fig. 7과 같이 8개의 손동작과 파지 동작을 구현하고자 한다. 8개의 손동작 및 파지 동작을 구현하기 위해 본 연구에서는 4개의 동작 상태를 만들었다. 4개의 동작 상태는 근전도 신호에 의해 분류되는 파지 동작 상태와 손동작 상태, 엄지의 내전과 외전 동작으로 분류되는 내전(Adduction) 동작 상태와 외전(Abduction) 동작 상태로 구성되어 있다. 4개의 동작 상태에서 8개의 손동작과 파지 동작을 구현하기 위해 우리는 두 개의 근전도 신호를
Table 1과 같이 3개의 제어 신호로 분류하였다. 근전도 동시신호제어(Co-Contraction, CC)는 의수의 파지 동작 상태와 손동작 상태를 구분하는 신호이며, Open 신호(Open Signal, OS)와 Close 신호(Close Signal, CS)는 8개의 손동작과 파지 동작을 구현할 수 있는 신호이다.
19
Table 1EMG signal control classification
Table 1
|
Command |
Function |
|
Co-Contraction (CC) |
Mode change |
|
Open Signal (OS) |
Motion |
|
Close Signal (CS) |
Motion |
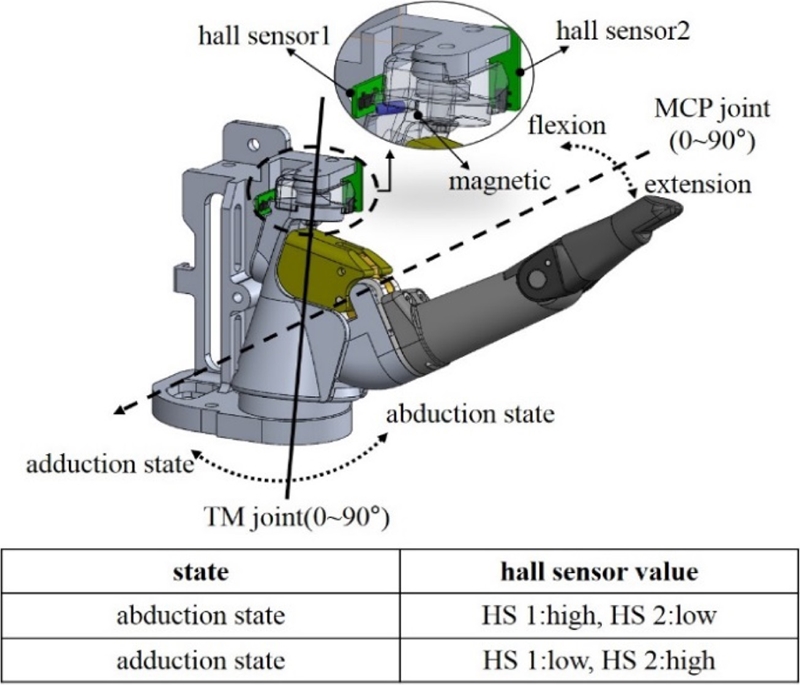
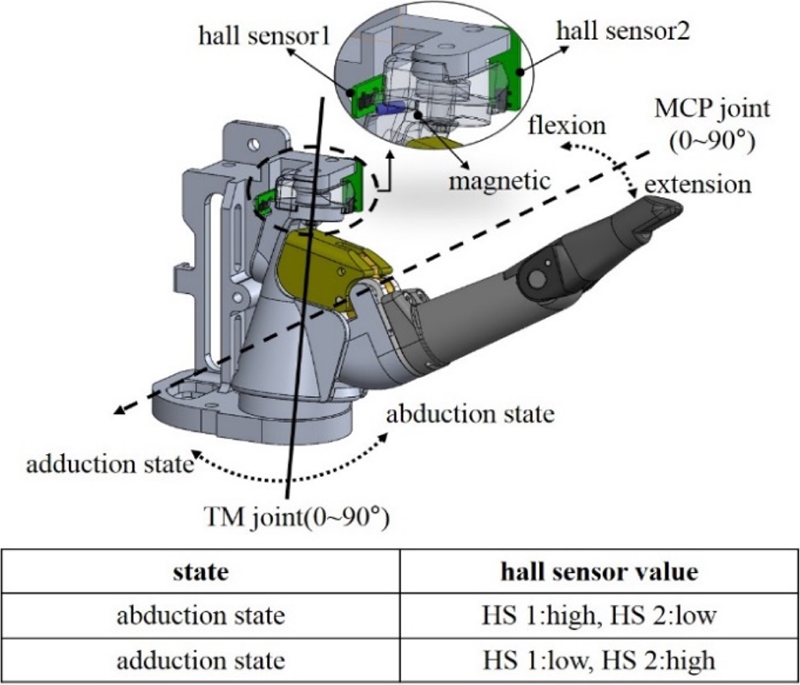
상지 절단 장애인들에게 가장 필요한 기능은 물건을 파지하는 기능이다. 따라서 개발된 다자유도 근전전동의수의 기본 동작 상태는 파지 동작 상태로 설정하였다. 파지 동작 상태에서 손동작을 구현하고 싶으면 CC 제어 명령을 인가하면 손동작 상태로 변환된다. 그리고 기본 파지 동작 상태에서 4개의 파지 동작을 구현하기 위해서는 엄지의 내전 동작 상태와 외전 동작 상태로 나누어져야 한다. 내전과 외전 동작 상태는 개발된 다자유도 근전전동의수의 손바닥 내부에 장착되어 있는 홀센서(Hall Sensor, HS)의 값에 의해 상태가 구분된다.
Fig. 8과 같이 엄지의 회전 각도가 0°면 외전 동작 상태, 90°면 내전 동작 상태로 구분할 수 있다.
Fig. 8Adduction and abduction motion state
3.3 직관적 제어 알고리즘
본 연구에서는 상지 절단 장애인들이 쉽고 효율적으로 개발된 다자유도 근전전동의수를 사용할 수 있도록 도와주는 직관적 제어 알고리즘을 개발하였다. 개발된 알고리즘은 의사소통 수단으로 사용되는 4개의 손동작과 4개의 파지 동작을 두 개의 근전도에서 출력되는 세 개의 신호 CC, OS, CS를 사용하여 구현할 수 있다.
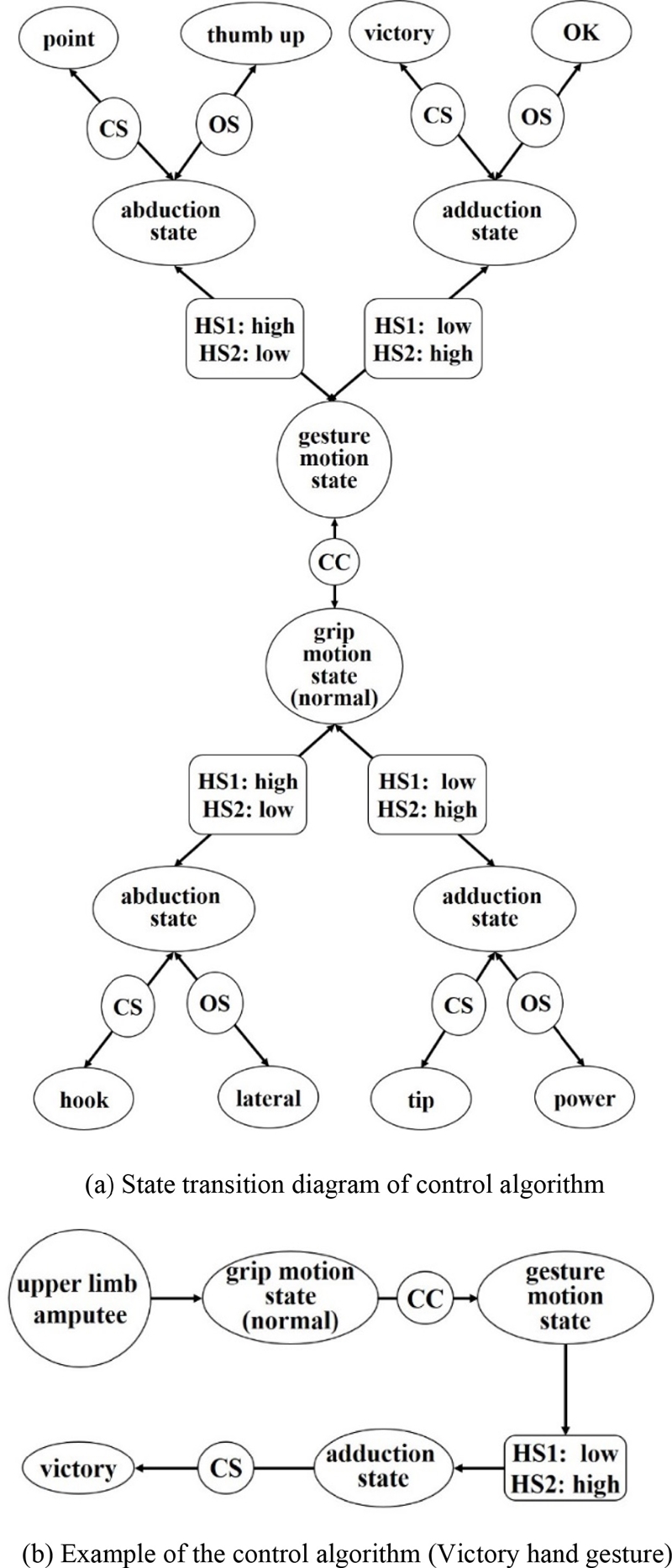
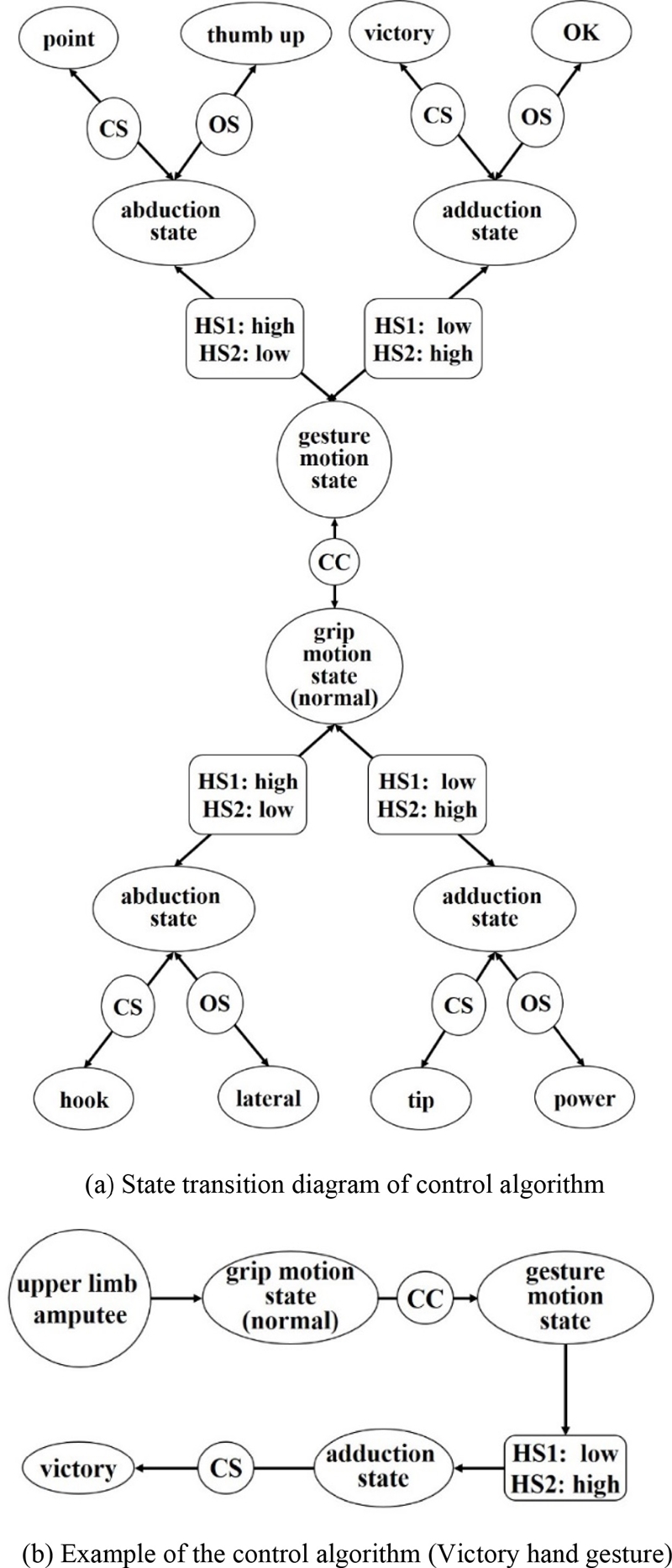
Fig. 9(a)는 제안한 알고리즘의 상태 천이도를 보여준다. 개발된 근전전동의수는 파지 동작 상태와 손동작 상태를 가지고 있으며, 기본 동작 상태는 파지 동작 상태이다. 파지 동작 상태에서 CC 신호를 입력하면 손동작 상태로 전환되며, 다시 CC 신호를 입력하면 파지 동작 상태로 전환된다. CC 신호에 의해 파지 동작 또는 손동작 상태가 결정되면 손바닥에 장착되어 있는 HS의 값에 따라 엄지의 내전 동작 상태 또는 외전 동작 상태가 결정된다. 만약에 파지 동작 상태에서 HS1가 High, HS2가 Low면 외전 동작 상태가 되며, 이때 OS신호를 인가하면 측면 파지 동작을 구현하며, CS 신호를 인가하면 걸기 동작을 구현할 수 있다. 그리고 파지 동작 상태에서 HS1 Low, HS2가 High면 내전 동작 상태가 되며, 이때 OS 신호를 인가하면 파워 파지 동작을 구현하며, CS 신호를 인가하면 손끝 파지 동작을 구현할 수 있다. 그리고 의수 기본모드 상태인 파지 동작 상태에서 CC 신호를 인가하면 상태에서 손동작 상태로 전환되고, HS1가 High, HS2가 Low면 외전 동작 상태가 되며, 이때 OS 신호를 인가하면 엄지 척 동작을 구현하며, CS 신호를 인가하면 방향 지시 동작을 구현할 수 있다. 그리고 손동작 상태에서 HS1가 Low, HS2가 High면 내전 동작 상태이며, 이때 OS 신호를 인가하면 OK 동작을 구현하며, CS 신호를 인가하면 승리 동작을 구현할 수 있다. 예를 들어 절단 장애인이 개발된 의수를 이용하여 손동작 중 승리 동작을 구현하고자하면, 기본 파지 동작 상태에서 CC 신호를 인가하여 손동작 상태로 전환 시킨 후 엄지를 내전 동작 상태로 만든 후 CS 신호를 인가하면 승리 동작을 구현할 수 있다(
Fig. 9(b) 참조).
Fig. 9Developed control algorithm
4. 실험 및 결과
본 연구에서는 상지 절단 장애인이 사용할 수 있는 다자유도 근전전동의수와 각 손가락을 독립적으로 제어할 수 있는 제어기를 개발하였고, 두 개의 근전도 신호를 사용하여 다양한 손동작 및 파지 동작을 쉽고 효율적으로 구현할 수 있는 직관적 제어 알고리즘을 개발하였다.
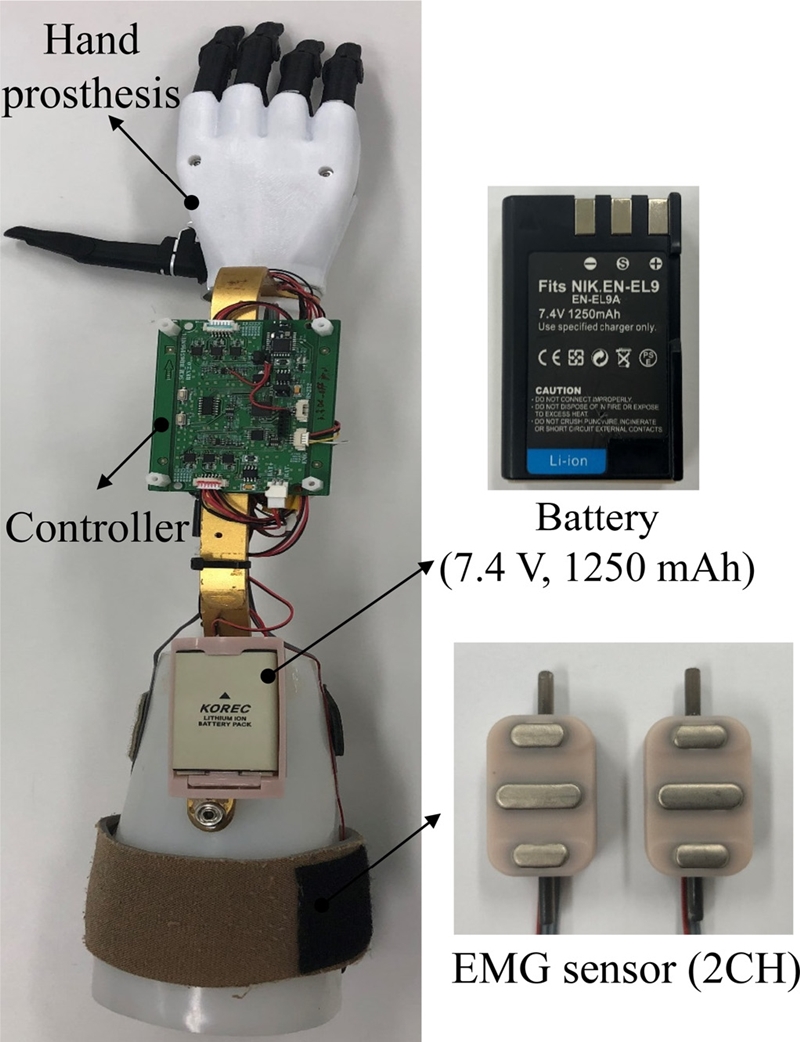
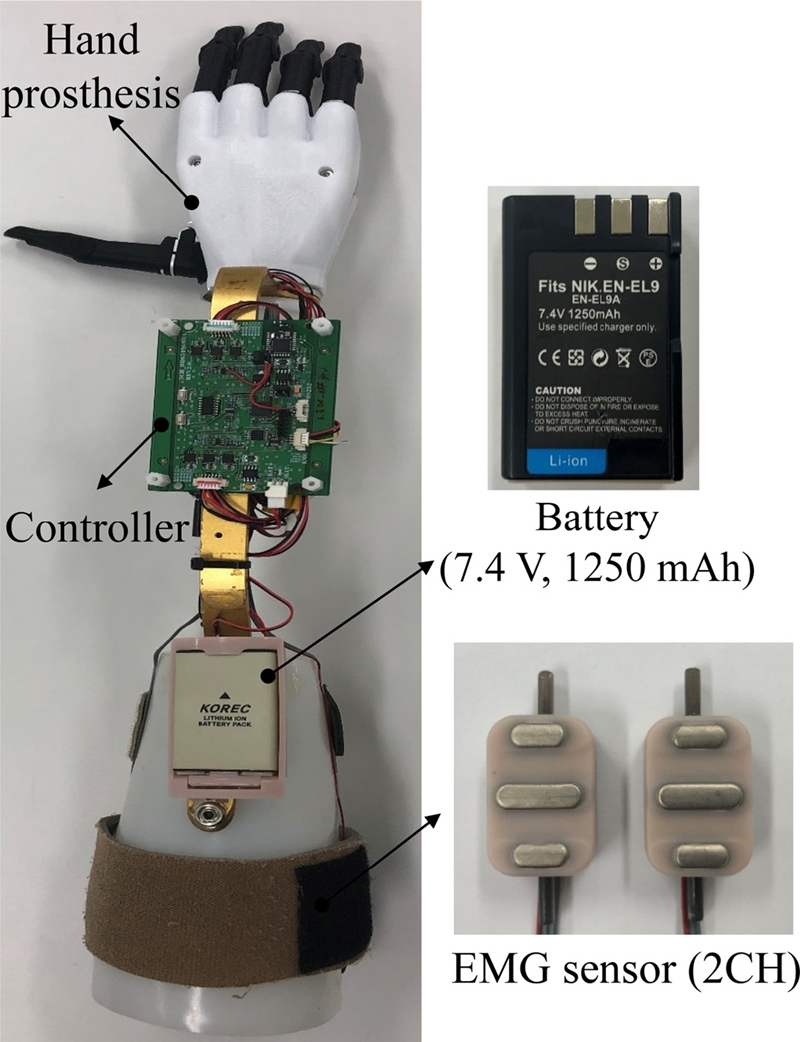
Fig. 10은 본 연구에서 제안한 직관적 제어 알고리즘을 구현하기 위한 실험 환경을 보여준다. 다자유도 근전전동의수는 다섯 손가락으로 구성되어 있으며, 각 손가락은 5축 모터 드라이버가 장착된 제어기에 의해 굽힘과 폄 동작을 구현할 수 있다. 엄지의 경우 수동 방식으로 내전과 외전 동작을 구현할 수 있다. 우리는 다양한 손동작 및 파지 동작을 구현하기 위해 두 개의 근전도 신호를 사용하며, 의수 구동에 사용되는 배터리는 입력전압 7.4 V, 1250 mAh 용량을 가지는 리튬 이온 배터리를 사용한다.
Fig. 10 Experiment environment to perform the proposed algorithm
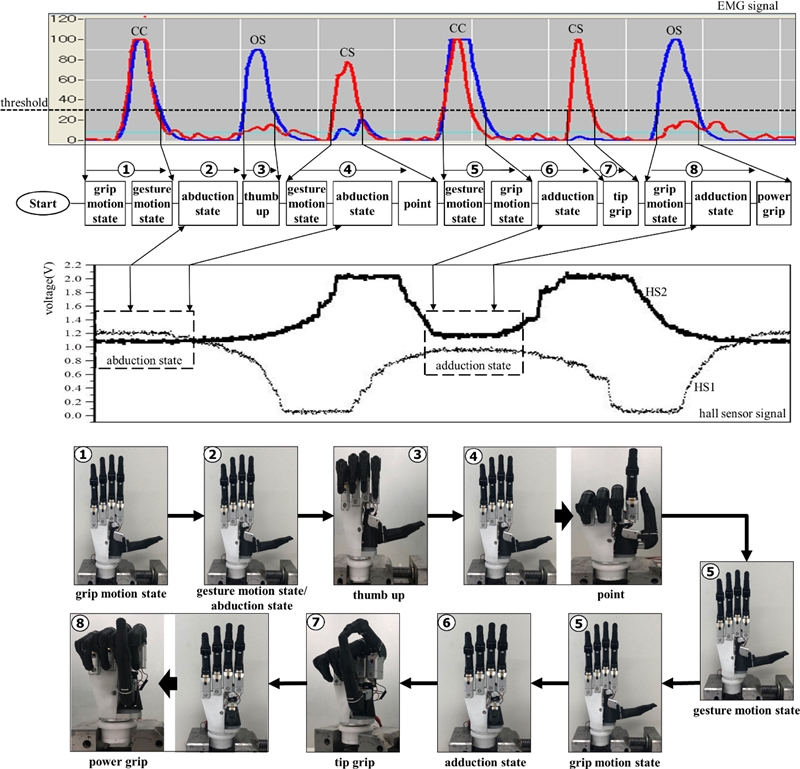
본 연구에서 개발된 다자유도 근전전동의수는 직관적 제어 알고리즘을 기반으로 의사소통의 수단으로 사용되는 4개의 손동작과 일상생활에서 사용 빈도가 높은 4개의 파지 동작을 구현할 수 있다.
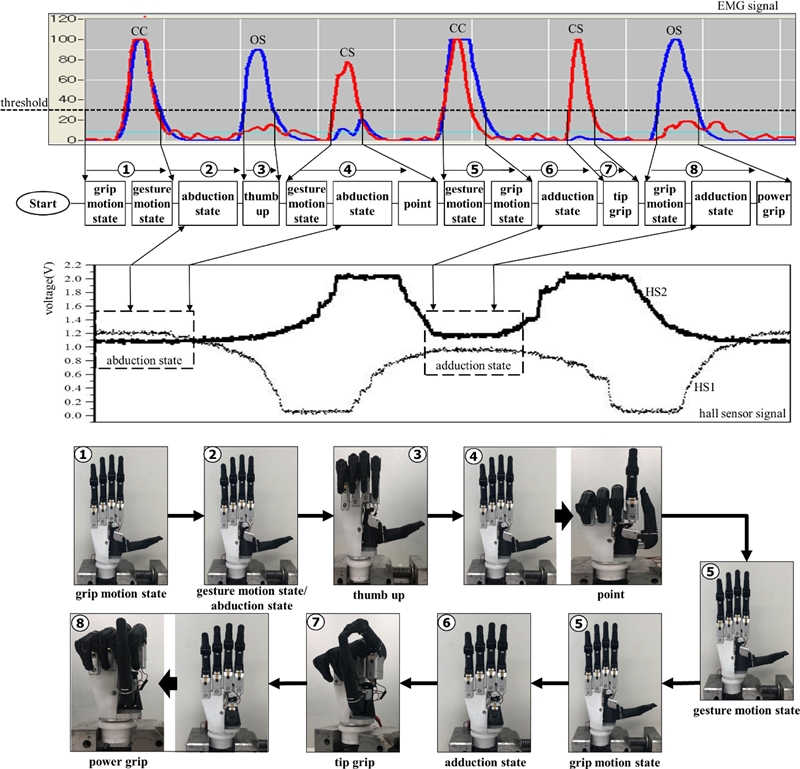
Fig. 11은 개발된 직관적 제어 알고리즘을 적용한 다자유도 근전전동의수가 4개의 동작을 구현한 결과를 보여준다. 근전도 신호는 정상인의 신호이며, 근전도 신호의 CC 제어 명령에 의해 개발된 손은 알고리즘의 기본 동작 상태인 파지 동작 상태에서 손동작 상태로 전환되는 것을 ①과 ②구간에서 알 수 있다. 이때 HS1의 값이 HS2의 값보다 High이기 때문에 손은 외전 동작 상태이다. 외전 동작 상태에서 근전도 신호의 OS 제어 명령을 인가하면 개발된 손은 엄지 척 동작을 구현하며(③ 구간 참조), CS 제어 명령을 인가하면 방향 지시 동작을 구현한다(④구간 참조). 그리고 ④구간에서 개발된 손에 CC 제어 명령을 인가하면, 손은 손동작 상태로 돌아간 후 파지 동작 상태로 변경된다(⑤구간 참조). 이때 수동 방식으로 엄지를 회전시켜 HS2 값이 HS1 값보다 High 상태로 만들면, 개발된 손은 내전 동작 상태가 된다(⑥구간 참조). 내전 동작 상태에서 근전도 신호의 CS 제어 명령을 인가하면, 손은 손끝 파지 동작을 구현하며(⑦구간 참조), 근전도 신호의 OS 제어 명령을 인가하면, 손은 파워 파지 동작을 구현한다(⑧구간 참조). 실험 결과는 본 연구에서 개발한 다자유도 근전전동의수는 직관적 제어 알고리즘을 적용하여 2개의 근전도 신호만 이용하여 다양한 손동작 및 파지 동작을 구현할 수 있음을 알 수 있었다.
Fig. 11 Experiment results of intuitive control algorithm
5. 결론
본 연구에서는 상지 절단 장애인들이 기존의 두 개의 근전도 신호를 이용하여 다양한 손동작 및 파지 동작을 구현할 수 있는 다자유도 근전전동의수를 제안하였다. 제안된 의수는 모터에 의해 구동되는 다섯 손가락과 제어기 그리고 두 개의 근전도 신호를 이용하여 다양한 손동작 및 파지 동작을 구현할 수 있는 직관적 제어 알고리즘으로 구성되어 있다. 개발된 손의 전체 무게는 443 g이며, 자유도는 Active 자유도 5개 Passive 자유도 1개 이며, 이를 이용하여 손은 8개의 손동작과 파지 동작을 구현할 수 있다. 본 연구에서는 개발한 직관적 제어 알고리즘의 타당성을 입증하기 위해 정상인 대상으로 실험을 수행하였다. 실험 결과 직관적 제어 알고리즘을 적용한 다자유도 근전전동의수는 두 개의 근전도 신호만을 사용하여 8가지의 손동작과 파지 동작을 쉽게 구현할 수 있음을 알 수 있었다.
향후에는 본 연구에서 개발한 다자유도 근전전동의수와 상용화된 근전전동의수를 비교하여 개발된 알고리즘의 효율성을 알 수 있는 정량적 평가 및 절단 장애인 대상으로 실험을 수행할 것이다.
ACKNOWLEDGMENTS
이 논문은 2017년 정부(과학기술정보통신부)의 재원으로 한국연구재단 바이오·의료기술개발사업의 지원을 받아 수행된 연구임(No. NRF-2017M3A9E2063255).
REFERENCES
- 1.
- 2.
- 3.
- 4.
- 5.
Controzzi, M., Clemente, F., Barone, D., Ghionzoli, A., and Cipriani, C., “The SSSA-Myhand: A Dexterous Lightweight Myoelectric Hand Prosthesis,” IEEE Transactions on Neural Systems and Rehabilitation Engineering, Vol. 25, No. 5, pp. 459-468, 2016.
10.1109/TNSRE.2016.2578980
- 6.
Bennett, D. A., Dalley, S. A., Truex, D., and Goldfarb, M., “A Multigrasp Hand Prosthesis for Providing Precision and Conformal Grasps,” IEEE/ASME Transactions on Mechatronics, Vol. 20, No. 4, pp. 1697-1704, 2014.
10.1109/TMECH.2014.2349855
- 7.
Bottomeley, A. H., “Myoelectric Control of Powered Prostheses,” Journal of Bone & Joint Surgery, Vol. 47-B, No. 3, pp. 3411-3415, 1965.
10.1302/0301-620X.47B3.411
- 8.
Jacobson, S. C., Knutti, D. F., Johnson, R. T., and Sears, H. H., “Development of the Utah Artificial Arm,” IEEE Transactions on Biomedical Engineering, Vol. 29, No. 4, pp. 249-269, 1982.
10.1109/TBME.1982.325033
- 9.
Hudgins, B., Parker, P., and Scott, R. N., “A New Strategy for Multifunction Myoelectric Control,” IEEE Transactions on Biomedical Engineering, Vol. 40, No. 1, pp. 82-94, 1993.
10.1109/10.204774
- 10.
Englehart, K., Hudgins, B., and Parker, P. A., “A Wavelet-Based Continuous Classification Scheme for Multifunction Myoelectric Control,” IEEE Transactions on Biomedical Engineering, Vol. 48, No. 3, pp. 302-311, 2001.
10.1109/10.914793
- 11.
Chu, J. U., Moon, I., Lee, Y. J., Kim, S. K., and Mun, M. S., “A Supervised Feature-Projection-Based Real-Time EMG Pattern Recognition for Multifunction Myoelectric Hand Control,” IEEE/ ASME Transactions on Mechatronics, Vol. 12, No. 3, pp. 282-290, 2007.
10.1109/TMECH.2007.897262
- 12.
Scheme, E., Fougner, A., Stavdahl, O., Chan, A. D., and Englehart, K., “Examining the Adverse Effects of Limb Position on Pattern Recognition Based Myoelectric Control,” Proc. of the Annual International Conference on Medicine and Biology of the IEEE Engineering, pp. 6337-6340, 2010.
10.1109/IEMBS.2010.5627638
- 13.
Cipriani, C., Controzzi, M., Kanitz, G., and Sassu, R., “The Effects of Weight and Inertia of the Prosthesis on the Sensitivity of Electromyographic Pattern Recognition in Relax State,” Journal of Prosthetics and Orthotics, Vol. 24, No. 2, pp. 86-92, 2012.
10.1097/JPO.0b013e3182524cce
- 14.
Atzori, M., Gijsberts, A., Castellini, C., Caputo, B., Mittaz Hager, A. G., et al., “Effect of Clinical Parameters on the Control of Myoelectric Robotic Prosthetic Hands,” Journal of Rehabilitation Research & Development, Vol. 53, No. 3, pp. 345-358, 2016.
10.1682/JRRD.2014.09.0218
- 15.
Naik, G. R., Al-Timemy, A. H., and Nguyen, H. T., “Transradial Amputee Gesture Classification Using an Optimal Number of SEMG Sensors: An Approach Using Ica Clustering,” IEEE Transactions on Neural Systems and Rehabilitation Engineering, Vol. 24, No. 8, pp. 837-846, 2015.
10.1109/TNSRE.2015.2478138
- 16.
Vujaklija, I., Farina, D., and Aszmann, O. C., “New Developments in Prosthetic Arm Systems,” Orthopedic Research and Reviews, Vol. 8, pp. 31-39, 2016.
10.2147/ORR.S71468
- 17.
Carrozza, M. C., Cappiello, G., Micera, S., Edin, B. B., Beccai, L., et al., “Design of a Cybernetic Hand for Perception and Action,” Biological Cybernetics, Vol. 95, No. 6, pp. 629-644, 2006.
10.1007/s00422-006-0124-2
- 18.
Feix, T., Pawlik, R., Schmiedmayer, H. B., Romero, J., and Kragic, D., “A Comprehensive Grasp Taxonomy,”
http://www.csc.kth.se/grasp/taxonomyGRASP.pdf (Accessed 8 JAN 2020)
- 19.
Park, S. H., Hong, B. K., Kim, J. K., Hong, E. P., and Mun, M. S., “Development of the Myoelectric Hang with a 2 DOF Auto Wrist Module,” Journal of Institute of Control, Robotics and Systems, Vol. 17, No. 8, pp. 824-832, 2011.
10.5302/J.ICROS.2011.17.8.824
Biography
- Sung Yoon Jung
Ph.D. student in the Department of Mechanical Engineering, Inha University. His research interests are rehabilitation engineering, prosthetic hand and prosthetic leg.
- Seung Gi Kim
Researcher in KCOMWEL Korea Orthopedics and Rehabilitation Engineering Center. Korea His research interests are embedded system, service robot, and sensor signal processing.
- DaeJin Jang
Senior researcher in KCOMWEL Korea Orthopedics and Rehabilitation Engineering Center. His research interests are rehabilitation robot, prosthetic hand and wheelchair.
- Shin Ki Kim
Research chief in KCOMWEL Korea Orthopedics and Rehabilitation Engineering Center. His research interests are rehabilitation engineering, prosthetic leg and wheelchair.
- Se Hoon Park
Research fellow in KCOMWEL Korea Orthopedics and Rehabilitation Engineering Center. His research interests are walking robot control, rehabilitation engineering, intelligent control, and human-robot interface.
- Joo-Hyung Kim
Professor in the Department of Mechanical Engineering, Inha University. His research interests are renewable energy system, intelligent sensor fabrication, advanced 3D printing, and advanced smart mechanical system.