ABSTRACT
This paper proposes a practical method, for evaluating 3-D positioning of outdoor mobile robots using the Unscented Kalman Filter (UKF). The UKF method does not require the linearization process unlike conventional EKF localization, so it can minimize effects of errors caused by linearization of non-linear models for position estimation. Also, this method does not require Jacobian calculations difficult to calculate in the actual implementation. The 3-D position of the robot is predicted using an encoder and tilt sensor, and the optimal position is estimated by fusing these predicted positions with the GPS and digital compass information. Experimental results revealed the proposed method is stable for localization of the 3D position regardless of initial error size, and observation period.
-
KEYWORDS: Mobile robot, Unscented kalman filter, 3D localization, Linearization
-
KEYWORDS: 이동로봇, 분산점 칼만 필터, 3차원 위치 평가, 선형화
1. 서론
최근 제 4차 산업혁명이 이슈가 되면서 지능로봇 기술에 대한 관심이 더욱 커지고 있다. 지능로봇 기술은 이미 대중적으로 사용되고 있는 청소 로봇에서부터 최근 활발하게 연구되고 있는 자율주행 자동차까지 다양한 분야에서 응용될 수 있는 차세대 첨단기술이다. 이와 같이 다양한 분야에서 필요성이 커지고 있는 지능로봇이 주어진 임무를 정확하게 수행하기 위해서 가장 중요한 것은 로봇 자신의 정밀한 위치평가이다.
1,2
로봇의 위치평가 방법은 환경에 따라 달라지는데, 실내 환경에 대한 연구는 이미 많이 수행되어 수 cm 단위의 정밀도 있는 위치추정이 가능하다. 반면에 옥외 환경에 대한 연구는 많이 이루어지지 않았으며, 옥외 환경 특성상 실내 환경에서 가능한 사전 환경정보 제공이나 정밀한 위치센서 사용이 어려워 로봇의 위치를 정밀하게 추정하기 어렵다. 따라서 옥외 환경에서는 일반적으로 GPS (Global Positioning System)를 사용하는데, GPS의 낮은 위치 정밀도를 보정하기 위해 주행계의 정보를 융합하는 방법이 주로 이용된다.
Choi
3는 다수의 GPS 수신기를 사용하여 얻은 위치 정보와 INS (Inertial Navigation Ssystem)를 융합하는 위치 추정 방법을 제안하였다. 더욱 정밀도를 높이기 위해 주행계 외에 다른 센서들을 추가하는 방법들도 연구되었는데, Kang
4는 INS와 SPR(Single Photo Resection)을 GPS와 융합하였고, Kim
5은 자이로 센서를 이용하여 얻은 자세 정보와 엔코더의 정보를 이용하여 GPS의 정보를 보정하였다. 그리고 Lim
6은 저 정밀도 저가의 GPS와 디지털 컴퍼스 및 엔코더의 정보를 이용한 위치평가 방법을 제안하였으며, 곡선 경로 및 GPS가 수신되지 못하는 곳에서도 위치평가 신뢰성이 보장됨을 보였다. 또한 관성 센서는 지속적인 오차 누적 문제가 있으므로
7,8 카메라의 영상 이미지나 레이저 스캐너를 GPS와 융합하여 위치를 추정하는 연구도 수행되었다.
9-13
이와 같은 기존 옥외용 위치평가 방법들은 대부분 2차원 위치평가 방법으로써 3차원 위치가 필요한 지능로봇의 응용 분야에는 적용될 수 없다. 예를 들면 골프장의 캐디 로봇의 경우, 현재 위치와 목표인 홀 사이의 거리와 방향뿐만 아니라 경사로 인한 고도차 정보도 필요하므로 3차원 위치평가가 필수적이다. 또한 산악지형에서 적 탐색이나 포격 위치 설정 등의 임무를 수행하는 군사용 로봇의 경우 지형에 따른 고도차를 고려한 3차원 위치가 필요하다. 그 밖에도 고층 건물이나 시설 등의 유지보수용 로봇의 경우에도 3차원 위치가 필수적이다. 또한 경사가 존재하는 환경에서 활동하는 로봇의 경우 경사가 클수록 주행 거리가 길수록 고도차에 의해 2차원 위치오차가 더욱 커지는 경향이 있으므로 경사지에서 더욱 신뢰성 있는 2차원 위치를 평가하기 위해서도 3차원 위치평가가 필요하다.
또한 기존 2차원 위치평가 연구들은 센서들간의 융합을 위해 주로 확장 칼만 필터(Extended Kalman Filter, EKF)를 사용한다. EKF는 비선형 시스템 모델을 1차항으로 선형화하는 방법으로서, 비선형성이 약하거나 관측 구간이 비교적 짧을 때는 선형화에 따른 오차가 큰 문제가 되지 않으며 처리 속도는 빠르다는 장점이 있다. 그러나 비선형성이 큰 모델의 경우 선형화에 따른 오차로 인해 관측구간이 커지거나 초기 오차가 큰 경우에는 위치평가 정밀도와 오차 수렴성이 떨어진다고 알려져 있다.
14 또한 선형화 과정에서 필요한 자코비안 행렬의 계산이 복잡하고 용이하지 아니한 경우가 발생할 수 있어 실제 적용 측면에서 어려움이 발생할 수 있다.
이와 같은 EKF의 단점을 보완하기 위한 방법으로 분산점 칼만필터(Unscented Kalman Filter, UKF)방법이 있다. 이 방법은 추측항법(Dead-Reckoning Method)으로 로봇의 다음 위치와 오차 공분산을 예측함에 있어서 비선형 시스템 모델을 선형화하여 그것으로부터 오차 공분산을 추정하는 EKF와는 달리, 이전에 평가된 위치의 오차 공분산을 기반으로 확률분포를 통해 소수의 분산점을 추출하고, 각 분산점들을 비선형 모델 자체를 통해 변환한 뒤 가중평균으로 로봇의 위치 및 오차 공분산을 추정하는 방법으로써 UT (Unscented Transform)에 기반을 둔 것이다.
15
이와 같은 UKF는 EKF 방법과는 달리 비선형 모델을 선형화하는 과정을 거치지 않으므로 추정 오차가 작아지며 자코비안의 유도가 필요 없다. 또한 비선형성이 큰 모델에서도 위치평가 정밀도나 수렴성이 보장될 뿐만 아니라 초기 오차의 크기에 대해 안정성이 있으며 관측 주기가 긴 경우에도 빠르게 수렴한다고 보고되고 있다. 아울러 UKF는 소수의 분산점을 사용하여 효과적으로 위치 및 오차 공분산을 추정함으로써 연산 부하를 최소화하여 이동로봇의 실시간 2차원 위치추정에 적합함이 입증된 바 있다.
16
본 논문에서는 이와 같은 UKF를 기반으로 옥외 환경에서 로봇의 3차원 위치를 추정하는 방법을 제안한다. 이 방법은 로봇 바퀴에 장착된 주행계 정보와 경사 센서 정보로부터 로봇의 3차원 위치를 추정하고, 이 추정된 위치에 UKF를 이용하여 GPS 및 디지털 컴퍼스 정보를 융합함으로써 최적의 3차원 위치를 평가한다. 이를 위해 필요한 시스템 모델과 관측 모델을 제시하고 이를 이용한 UKF 기반 위치평가 방법을 제안한다. 또한 실제 실험을 통하여 제안된 UKF 기반 3차원 위치평가의 성능을 평가한다.
2. UKF 기반 3차원 위치평가
2.1 시스템 모델 및 측정 모델
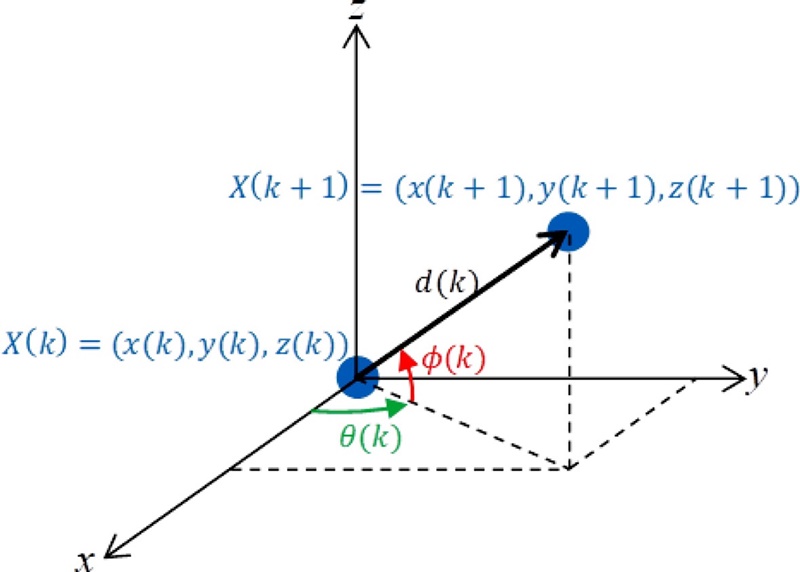
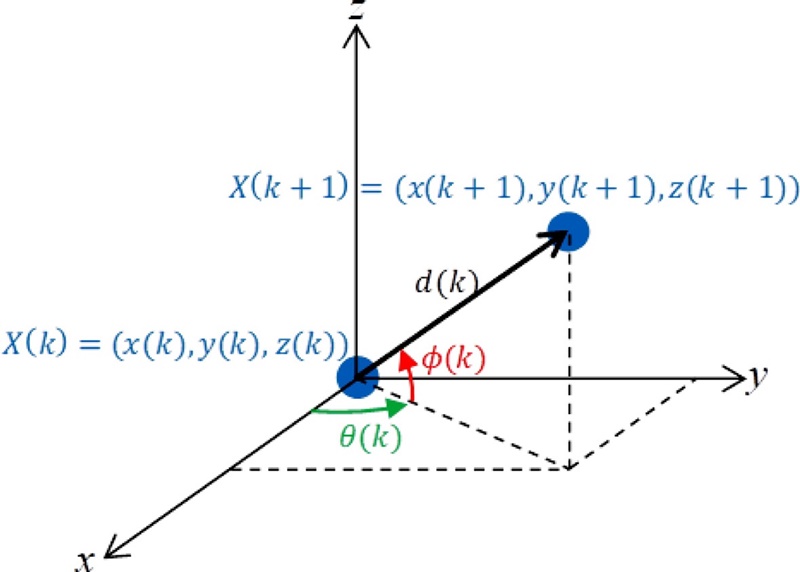
본 연구에서는 로봇의 3차원 위치를 나타내기 위한 상태변수를 X = [x, y, z, θ, ϕ]T로 정의한다. 각 상태변수의 의미는 x, y 그리고 z는 경위도 방향과 고도 방향의 위치를 나타내며, θ와 ϕ는 로봇의 이동 방향에 대한 Yaw 및 Pitch 각도를 나타낸다. Roll 각도는 로봇의 위치추정에 별다른 영향이 없으므로 상태변수에 포함하지 않았다.
시간
k에서
k + 1로 변할 때 로봇의 위치를 나타내는 시스템 모델은 다음
식(1)과 같이 정의한다.
여기서
u(
k) = [
d(
k), Δ
θ, Δ
ϕ]
T로써 제어입력을 나타내는데,
d(
k)는 로봇의 이동 거리, Δ
θ는 로봇의 진행 방향 각도 변화량, 그리고 Δ
ϕ는 경사각 변화량을 나타낸다. 또한
v(
k)는 평균이 0이고 공분산이
Q(
k)인 로봇의 이동과 관련된 가우시안 잡음이고,
F(
X(
k),
u(
k))는 로봇의 이동과 관련된 비선형 상태천이함수로써
Fig. 1의 관계에 따라 다음
식(2)와 같이 정의한다.
17
Fig. 1System modeling
시간
k + 1에서 DGPS와 디지털 컴퍼스의 측정값을 로봇의 위치와 연관시키는 측정 모델은
식(3)과 같다.
여기서
ω(
k)는 평균이 0이고 공분산이
R(
k)인 DGPS 및 디지털 컴퍼스의 측정에 개입되는 가우시안 잡음이다.
H(
X(
k + 1))는 센서의 측정과 관련된 비선형 상태천이함수로써 다음
식(4)와 같이 정의한다.
17
여기서
xDGPS(
k + 1),
yDGPS(
k + 1),
zDGPS(
k + 1)는 DGPS의 측정값으로써 각각 경도, 위도, 고도를 나타내며,
θDC(
k + 1)는 디지털 컴퍼스의 측정값이다.
ϕc(
k + 1)은 경사를 측정할 센서를 추가적으로 사용하지 않기 때문에 시간
k에서
k + 1까지 DGPS 측정값의 변화량으로부터 계산된 로봇의 경사각으로 대체하며 다음
식(5)와 같이 계산한다.
여기서 ΔxDGPS, ΔyDGPS, ΔzDGPS는 시간 k에서 k + 1 사이에 DGPS로 측정된 경도, 위도 및 고도 위치 변화량을 나타낸다.
2.2 로봇 위치 예측
일반적인 UT에서 평균과 분산점 사이의 거리는 상태변수의 차원이 증가할수록 커지며, 음반정치(Negative Semi-Definite)가 되는 문제가 발생할 수 있다. 이를 해결하기 위한 방법이 Scaled UT이며 본 연구에서는 이 방법을 이용한다.
18 이 방법은 매개변수
α와
β, 그리고
η를 이용하여 분산점의 거리를 조절함으로써 음반정치 발생 문제를 해결한다.
시간
k + 1에서의 로봇의 위치를 예측하기 위해서 먼저 시간
k에서의 공분산 행렬
P(
k)로부터 다음
식(6)을 만족하는 제곱근 행렬
L을 구한다.
여기서
n은 상태변수의 차원이며, 본 연구에서
n = 5이고
λ는 다음
식(7)과 같이 정의된다.
여기서 분산점 크기 조정 매개변수 크기는 0 ≤ α ≤ 1, η ≤ 0로 설정하여야 하는데, 본 논문에서는 α = 0.1, η = 0의 값을 사용하였다.
다음으로 제곱근 행렬
L과 시간
k에서의 로봇의 위치
X(
k)를 이용하여 2
n+1개의 로봇 위치 예측용 분산점인 시그마 포인트 χ
i(
k)를 다음
식(8)과 같이 추출한다.
여기서 Lij는 제곱근 행렬 L의 요소로서 i는 행, j는 열을 나타낸다.
추출된 시그마 포인트
χi(
k)로부터
식(2)의 비선형 상태천이함수를 이용하여 시간
k + 1에서의 변환된 시그마 포인트
χi(
k + 1)를 다음
식(9)와 같이 계산한다.
여기서 i = 0, 1, 2,…, 2n이고 χi,x(k), χi,y(k), χi,z(k), χi,θ(k) 및 χi,ϕ(k)는 각각 변환 전 시그마 포인트 χi(k)의 x, y, z, θ 및 ϕ방향 성분을 나타낸다.
변환된 시그마 포인트
χi(
k + 1)를 기반으로 시간
k + 1에서 로봇의 위치
X^k+1를 다음
식(10)과 같이 가중평균을 이용하여 예측한다.
여기서
ωi는 로봇의 위치 예측을 위한 가중평균 계산용 가중치로써 다음
식(11)과 같이 정의된다.
이 예측에 수반되는 오차 공분산 행렬
P^k+1은 다음
식(12)와 같이 계산한다.
여기서
DX=χik+1-X^k+1로서
식(9)를 통해 변환된 시그마 포인트와
식(10)을 통해 예측된 로봇의 위치의 차이를 나타낸다.
Q(
k + 1)는 제어입력
u(
k)를 반영하여 계산하며, 오차 공분산 행렬의 가중평균 계산용 가중치
ωic는 다음
식(13)과 같이 계산된다.
여기서 상태변수의 특성이 가우시안이므로
β = 2의 값을 사용하였다.
17
시간
k + 1에서 센서의 측정값을 예측하기 위해 먼저 앞에서 계산된 로봇의 위치 예측에 수반된 공분산 행렬
P^k+1를 이용하여 다음
식(14)를 만족하는 제곱근 행렬
Lo를 구한다.
여기서
λ는
식(7)과 동일하다. 제곱근 행렬
Lo와 예측된 로봇의 위치
X^k+1를 이용하여 2
n + 1개의 측정값 예측용 시그마 포인트
χiok+1를 다음
식(15)와 같이 추출한다. 여기서
Lij는 제곱근 행렬
L의 요소로서
i는 행,
j는 열을 나타낸다.
다음으로 추출된 시그마 포인트
χiok+1를
식(4)로 정의되는 측정모델에 적용하여 변환된 측정값 예측용 시그마 포인트
Υi(
k + 1)를 다음과 같은
식(16)으로 구한다.
여기서 i = 0, 1, 2,…,2n이고 χi,xok, χi,yok, χi,zok, χi,θok 및 χi,ϕok는 각각 변환 전 시그마 포인트 χiok의 x, y, z, θ 및 ϕ방향 성분을 나타낸다.
변환된 시그마 포인트
Υi(
k + 1)의 가중평균이 시간
k + 1에서 예측된 센서의 측정값
Z^k+1이 되며 다음
식(17)로 계산한다.
여기서 측정값 예측을 위한 가중평균 계산용 가중치
ωi는
식(11)과 동일하다.
DGPS 및 디지털 컴퍼스는 다양한 환경적인 요인에 의해 실제 위치 및 방위 측정 시 오차가 크게 발생할 수 있다. 따라서 현재 측정값이 위치 갱신에 유효할 정도의 신뢰성을 가지고 있는지 여부를 평가하는 측정값의 유효성 평가를 할 필요가 있다. 이를 위해 먼저 각 센서들의 실제 측정값
Z(
k + 1)과 예측된 측정값
Z^k+1의 차로 구성되는 Innovation 행렬
Γ(
k + 1)을 다음
식(18)과 같이 구성한다.
여기서 Z^xk+1, Z^yk+1, Z^zk+1, Z^θk+1 및 Z^ϕk+1는 각각 예측된 측정값 Z^k+1의 x, y, z, θ 및 ϕ방향 성분을 나타내며, Z(k + 1)은 실제 측정값이다.
다음으로 측정값의 유효성을 평가하기 위해 Validation Gate
G(
k + 1)를 다음
식(19)와 같이 정의한다.
여기서
γ는 측정값의 유효성 범위를 설정하는 설계변수다. 만약 측정값이
식(19)를 만족한다면 유효한 측정값으로서 로봇의 위치 및 오차 공분산 갱신에 이용된다. 반면에
식(19)를 만족하지 못하는 측정값은 위치 갱신에 유효하지 않으므로 무시하고,
식(10)으로 예측된 로봇 위치와
식(12)로 구한 오차 공분산을 최종 평가값으로 간주하고 다음 단계의 위치평가로 넘어간다.
식(19)를 만족하는 측정 값에 대해서 다음과 같이 위치 및 공분산을 갱신한다. 먼저 로봇의 위치 및 오차 공분산의 갱신을 위한 칼만 이득
K(
k + 1)은 다음
식(20)으로 계산한다.
여기서
PXZ(
k + 1)와
PZZ(
k + 1)는 다음
식(21)과
식(22)으로 계산한다.
여기서
DX=χik+1-X^k+1, 그리고
DZ=Yik+1-Z^k+1이며, 가중치
ωic는 식 (13)과 동일하다. 계산된 칼만 게인을 이용하여 다음과
식(23)과 같이 시간
k + 1에서의 로봇의 위치 및 오차 공분산을 갱신한다.
3. 실험 및 고찰
3.1 실험 방법
개발된 UKF 기반 3차원 위치평가 방법의 성능을 평가하기 위해
Fig. 2와 같은 환경에서 실험을 수행하였다. 전체 주행거리는 400 m정도이고 고도차가 25 m정도인 환경이며 출발 지점은 우측 상단 지점이고 도착 지점은 우측 하단 지점이다. 위치평가의 정량적인 평가를 위한 기준 경로는 로봇이 이동할 경로 내 X 표시된 15곳의 위치에서 고도 정보를 포함한 실제 좌표를 측정하고 각 지점을 연결하여 설정하였다.
Fig. 2Experimental environment

기준 경로는 도로의 중앙선을 기준으로 설정하였으며, 리모컨을 이용하여 로봇이 기준 경로를 따라 이동하도록 주행시킨 후 기준 경로에 대한 DGPS 및 UKF 기반 3차원 위치평가 결과의 위치오차를 비교 분석하는 방법으로 성능평가를 수행하였다. 로봇은 평균 0.6 m/s의 일정한 속력으로 주행하도록 하였다. 실험에 사용된 로봇은 Adept Technology사의 Pioneer-3DX이며 사양
Table 1과 같다. 실험에 사용된 경사센서는 Level Development사의 LCH-360-USB, DGPS는 AscenKorea 사의 RCV-3000, 그리고 디지털 컴퍼스는 WithRobot사의 myAHRS+를 사용하였으며 각 센서의 사양은
Table 2와 같다.
Table 1Specifications of the robot
Table 1
|
Size (m) |
Weight (kg) |
Payload (kg) |
Battery |
|
0.445 × 0.393 × 0.237 |
9 |
25 |
12 VDC |
Table 2Specifications of the sensors
Table 2
|
Accuracy |
Resolution (º) |
Data rates (Hz) |
|
Inclinometer |
0.3° |
0.05 |
1 |
|
DGPS |
2.5 m |
- |
1 |
|
Digital compass |
3° |
0.01 |
100 |
3.2 실험 결과
이상과 같이 수행된 실험 결과를
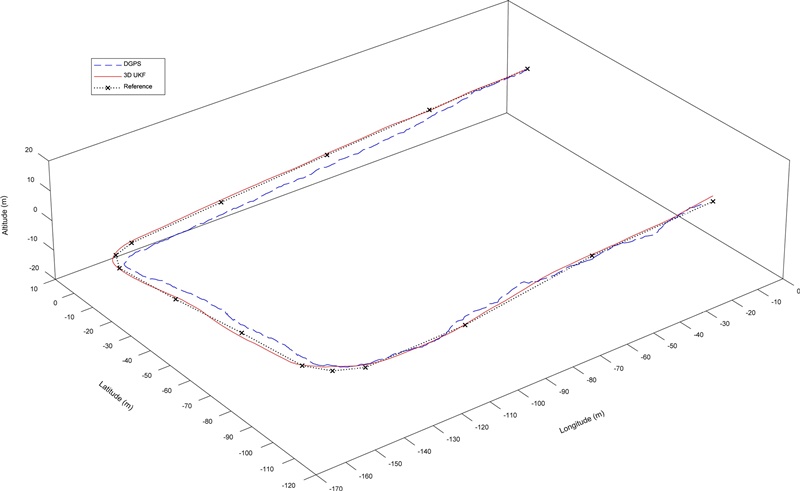
Fig. 3에 나타내었다.
Fig. 3에서 점선은 DPGS, 실선은 UKF 기반 3차원 위치평가, 그리고 X 표시가 포함된 가는 점선은 기준 경로를 나타낸다. 기준 경로는 X로 표시된 15개의 기준 위치를 정밀 측정한 후 각 기준 위치를 연결하는 방법으로 설정하였다. 결과를 살펴보면 DGPS의 이동궤적은 기준 경로와는 다소 차이를 보이고 있는 반면에 UKF 기반 3차원 위치평가는 비교적 기준 경로와 유사한 궤적 특성을 보인다.
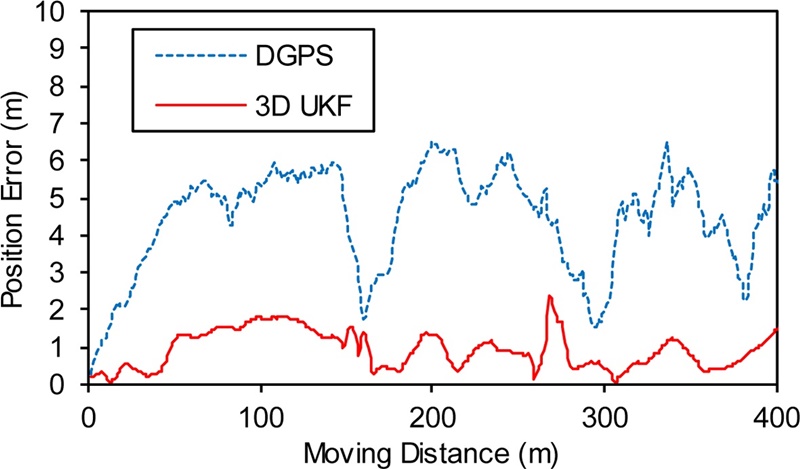
Fig. 4는 DGPS 및 UKF 기반 3차원 위치평가의 기준 경로에 대한 RMS (Root Mean Square) 위치오차를 나타낸다.
Fig. 3에서 점선은 DGPS의 위치오차, 그리고 실선은 UKF 기반 3차원 위치평가의 위치오차를 나타내며, 이에 대한 위치오차의 정량적인 특성을
Table 3에 나타냈었다.
Table 3에서 3D EKF 오차 특성은 동일한 환경과 조건에서 동일한 측정데이터로 수행된 EKF 방법에 의한 위치인식 실험 결과이다.
16 오차 특성을 분석해보면 DGPS는 최대가 6.76 m, 평균이 4.24 m로서 다소 큰 위치오차를 보이고 있는 반면에 UKF 기반 3차원 위치평가는 최대오차가 2.26 m, 평균오차가 0.93 m로서 DGPS에 비해 위치오차가 크게 개선되고 있음을 알 수 있다. 또한 EKF 결과와 비교해 보면 전반적으로 UKF 오차 특성이 더 양호하며, 평균오차 기준으로 EKF에 비해 11%정도 우수한 특성을 보이는 것으로 나타났다.
Fig. 3Localization results
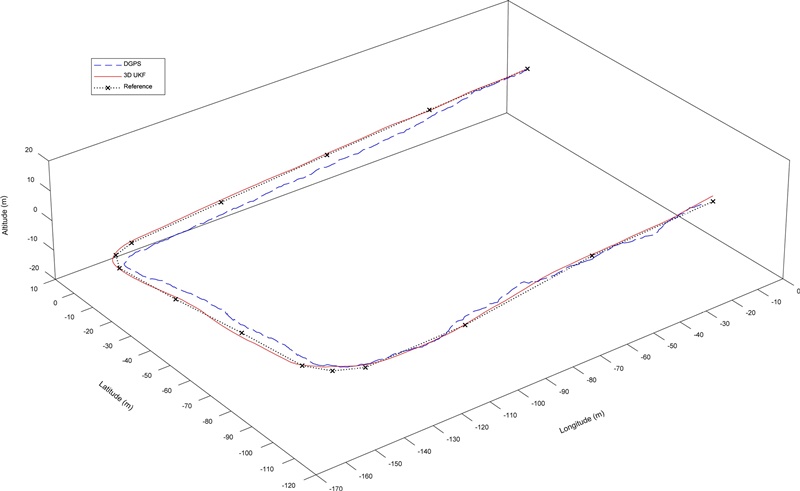
Fig. 4Position error (RMS)
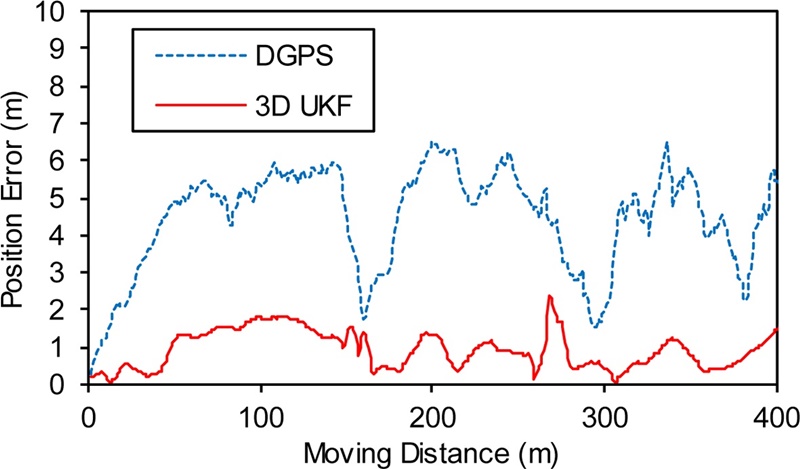
Table 3
Characteristics of the position error
(Unit: m)
Table 3
|
Methods |
Max. |
Avg. |
Std. |
|
DGPS |
6.76 |
4.24 |
1.36 |
|
3D UKF |
2.26 |
0.93 |
0.42 |
|
3D EKF |
2.35 |
1.04 |
0.48 |
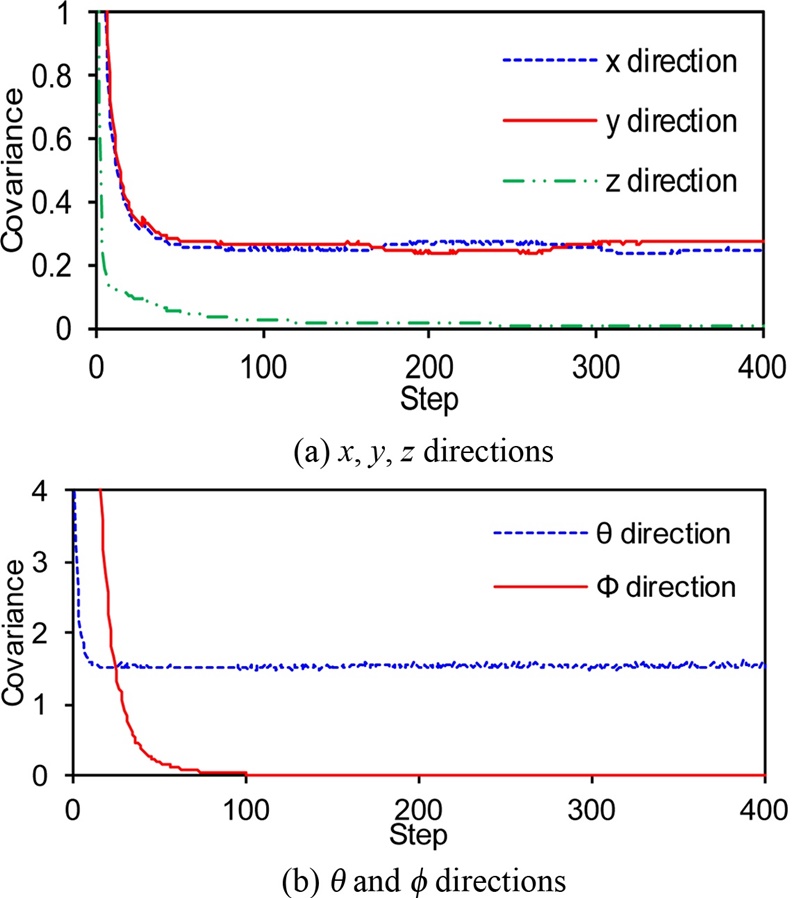
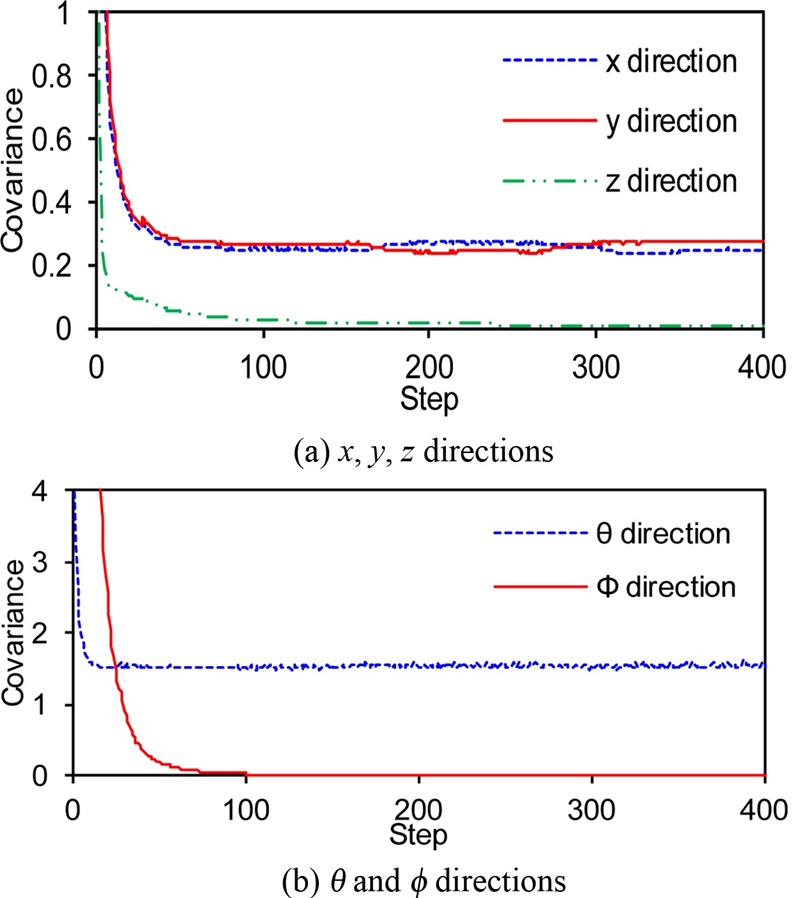
제안된 3차원 위치평가 방법의 오차 수렴성 및 안정성을 확인하기 위해 관측 단계에 따른 오차 공분산을
Fig. 5에 나타냈다. 초기 오차 공분산은
Table 2에 나타낸 센서들의 특성을 반영하여 설정하였다.
Fig. 5(a)는 로봇의 위치와 관련된 x, y 그리고 z 방향의 오차 공분산이고,
Fig. 5(b)는 로봇의 각도와 관련된
θ 및
ϕ 방향의 오차 공분산을 나타낸다. 실험 결과 x와 y 방향의 오차 공분산은 비슷한 특성을 보였으며 주행 초기에 빠르게 수렴하고있다. 특히 z 방향의 오차 공분산은 0에 가깝게 수렴하고 있는데, 이것은
ϕ 방향의 오차 공분산과 연관되어 있기 때문이다. 즉,
ϕ방향 측정에 사용된 경사 센서의 특성이
Table 2에 나타낸 바와 같이 다른 센서들보다 훨씬 정밀한 특성을 가지므로
Fig. 5(b)에 나타난 바와 같이
ϕ 방향의 공분산이 0에 가까운 값으로 수렴하고 있으며, 이와 연관되어 평가되는 z방향 공분산 수렴 값이 작아진 것으로 사료된다. 다만
ϕ 방향의 수렴속도가 느린 것은
식(5)와 같이 여러 상태 벡터에 연관이 되어 있어 이들 상태벡터의 수렴성에 영향을 받기 때문이다. 또한
θ 방향의 오차 공분산은 디지털 컴퍼스의 정밀도가 떨어지기 때문에
ϕ 방향보다는 큰 값으로 수렴하지만 초기에 빠르게 수렴하고 있다. 따라서 제안된 UKF 기반 3차원 위치평가 방법은 빠른 오차 수렴성 및 안정성을 보이고 있다고 사료된다.
Fig. 5Covariance
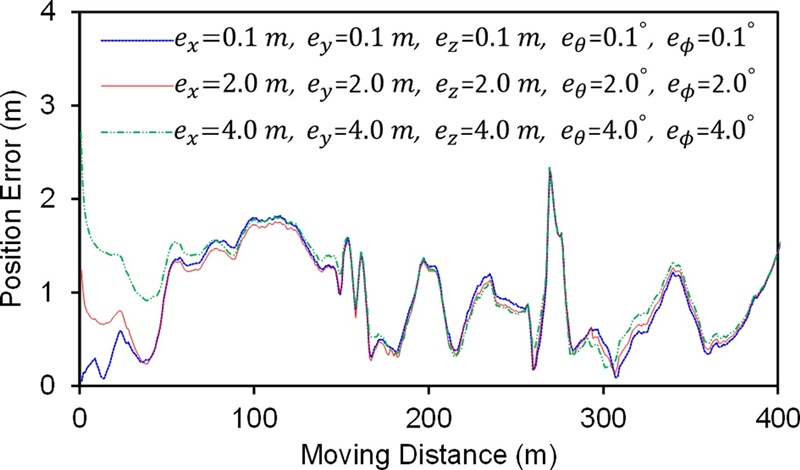
UKF 기반 3차원 위치평가 방법의 초기 오차 크기에 대한 수렴성 및 안정성을 확인하기 위해 각 방향의 초기 오차 값 크기 변화에 따른 공분산을 평가하였다.
Fig. 6은 이동 거리에 따른 위치평가 오차 크기를 나타내며,
Fig. 7에서
ex,
ey,
ez는 각각
x,
y,
z 방향의 초기 오차를 의미하고,
eθ,
eϕ는
θ 및
ϕ 방향의 초기 오차를 나타낸다. 실험 결과를 분석해보면 위치평가 초기에는 초기 오차 크기에 따라 다소 상이한 오차 특성을 보이지만 점차 초기 오차 크기에 상관없이 유사한 오차 특성을 보이고 있음을 알 수 있다.
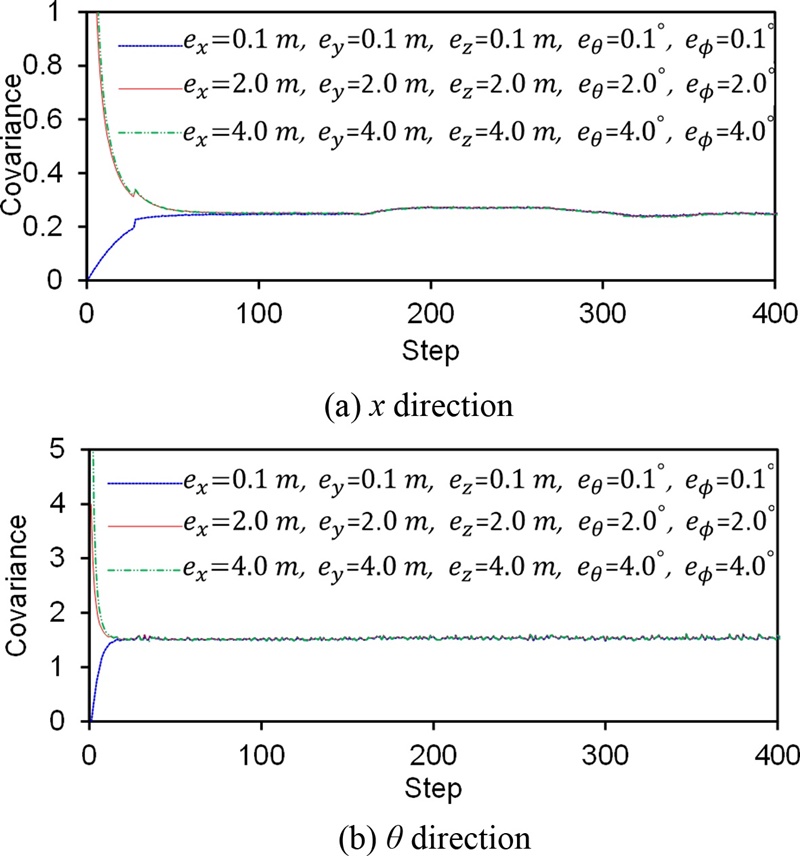
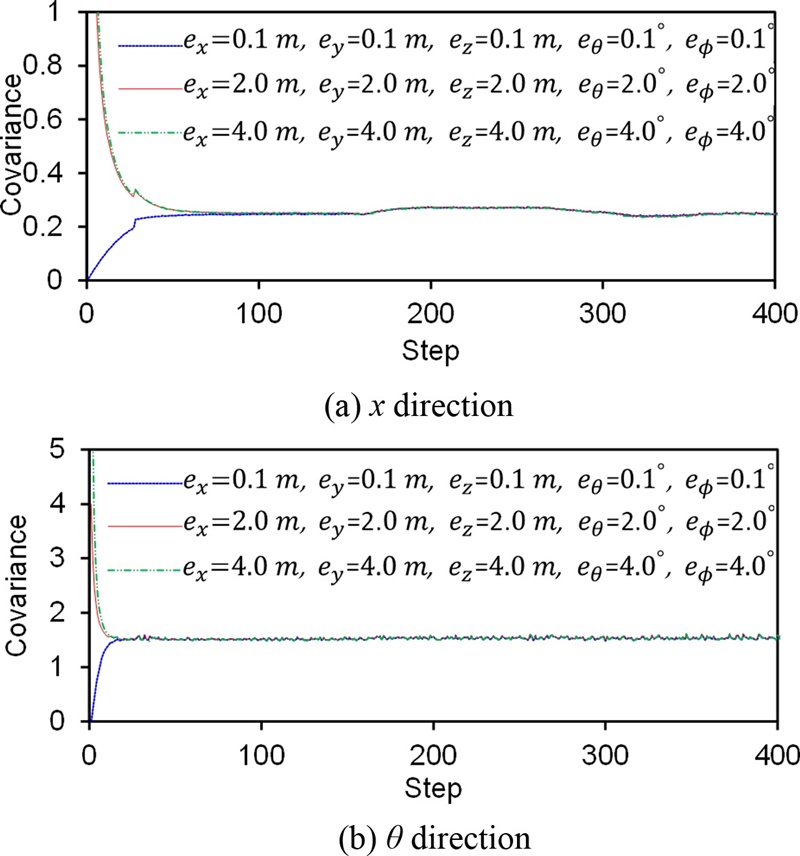
Fig. 7은
Fig. 6과 같은 초기 오차 조건에 대한 공분산을 나타낸다. 각 방향의 공분산은
Fig. 5와 유사한 특성을 보였는데, 그 중 x 방향의 공분산과
θ 방향의 오차 공분산만을 대표적으로 나타내었다. 실험 결과를 보면 공분산 특성 역시 초기 오차의 크기에 상관없이 빠르게 수렴하고 있음을 알 수 있다. 따라서 제안된 방법은 초기 오차 크기에 대해서 안정성을 보여준다고 사료된다.
Fig. 6Position error according to initial error (RMS)
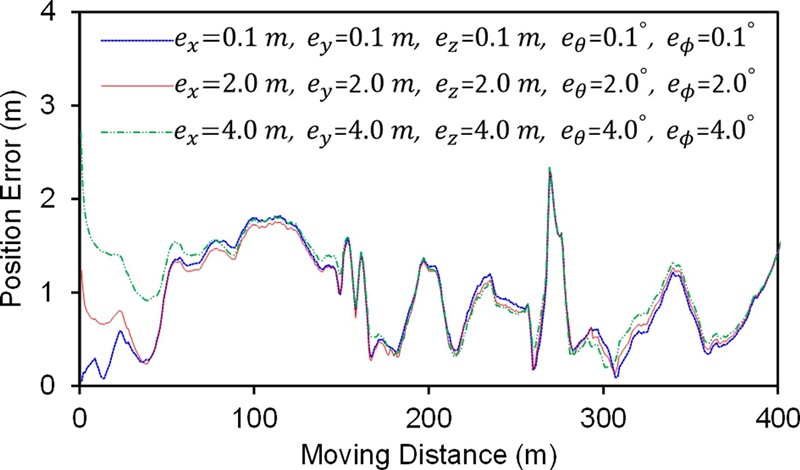
Fig. 7Covariance according to initial error
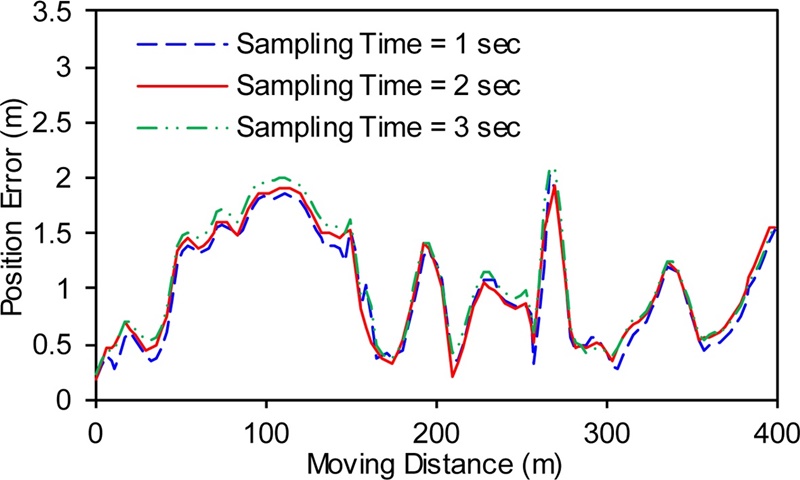
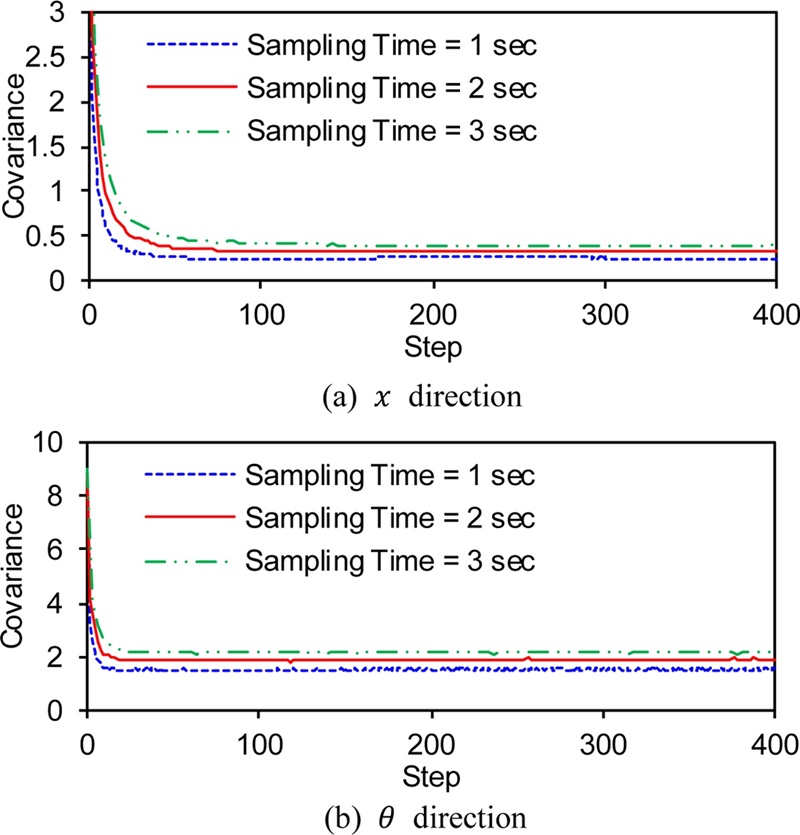
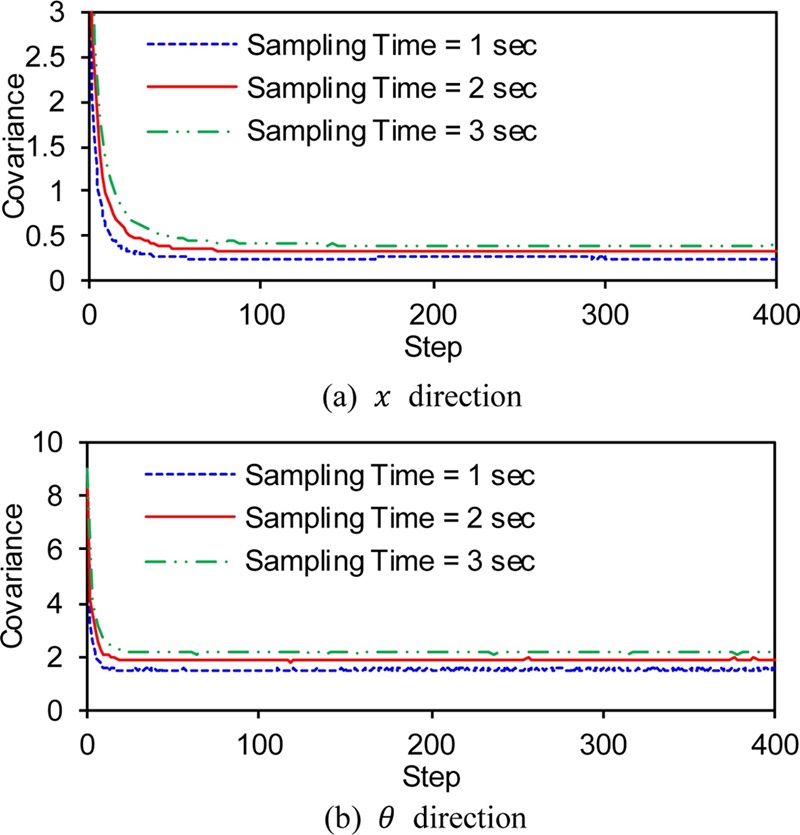
다음으로 UKF 기반 3차원 위치평가 방법의 관측 주기에 대한 성능을 확인하기 위해 필터 관측 주기를 1초, 2초, 3초로 변화시키면서 그에 따른 위치오차 및 공분산을 분석하였다.
Fig. 8은 관측 주기에 따른 위치오차 특성을 나타내며,
Fig. 9는 그에 따른 공분산 특성 중 x와
θ 성분을 대표적으로 나타낸 것이다. 실험 결과 관측 주기가 길어질수록 각 공분산이 수렴하는 값의 크기가 약간 커지기는 하지만 수렴성에는 문제가 없는 것으로 나타났다. 따라서 제안된 방법은 관측 주기가 3초 정도로 길어져도 안정적인 위치평가가 가능하다고 사료된다.
Fig. 8Position error according to sampling time (RMS)
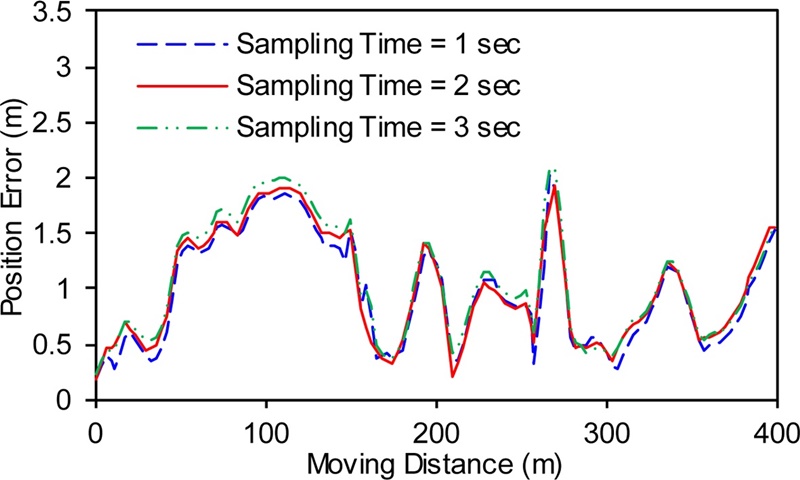
Fig. 9Covariance according to sampling time
4. 결론
본 논문에서는 UKF 알고리즘을 이용한 실외용 로봇의 3차원 위치평가 방법을 제안하고 그 성능을 실험을 통하여 정량적으로 분석 및 평가하였다. 실험 결과 제안된 방법은 DGPS의 위치오차를 크게 개선하여 효과적인 위치평가가 가능함을 보였다. 또한 제안된 위치평가 방법은 초기 오차 크기에 대해서도 안정적인 성능을 보여주었으며, 관측 주기가 길어짐에도 신뢰성 있는 위치 추정 성능을 보이는 것을 확인하였다. 따라서 제안된 UKF 기반 3차원 위치평가 방법은 실외환경에서 안정성과 신뢰성이 보장되는 위치평가 방법으로 실용화 적용이 가능할 것으로 사료된다.
ACKNOWLEDGMENTS
이 논문은 2017년도 정부(교육부)의 재원으로 한국연구재단의 지원을 받아 수행된 기초연구 사업(No. NRF-2017R1D1A1B03034373)과 2020년도 제주대학교 교원성과 지원사업의 공동지원으로 연구되었음.
REFERENCES
- 1.
Lim, J. H., “A Study on a Localization System for Tour Guide Robot,” Journal of the Korean Society for Precision Engineering, Vol. 29, No. 7, pp. 762-769, 2012.
10.7736/KSPE.2012.29.7.762
- 2.
Lim, J. H. and Leonard, J. J., “Mobile Robot Relocation from Echolocation Constraints,” IEEE Transactions on Pattern Analysis and Machine Intelligence, Vol. 22, No. 9, pp. 1035-1041, 2000.
10.1109/34.877524
- 3.
Choi, S. H., Kim, Y. K., Hwang, Y. S., Kim, H. W., and Lee, J. M., “EKF Based Outdoor Positioning System Using Multiple GPS Receivers,” The Journal of Korea Robotics Society, Vol. 8, No. 2, pp. 129-135, 2013.
10.7746/jkros.2013.8.2.129
- 4.
Kang, B. Y., Han, J. H., and Kwon, J. H., “Analysis of Factors Affecting Performance of Integrated INS/SPR Positioning during GPS Signal Blockage,” Journal of the Korean Society of Surveying, Geodesy, Photogrammetry and Cartography, Vol. 32, No. 6, pp. 599-606, 2014.
10.7848/ksgpc.2014.32.6.599
- 5.
Kim, J. Y., Lee, J. H., Byun, J. M., and Kim, S. H., “Localization Performance Improvement for Mobile Robot Using Multiple Sensors in Slope Road,” The Institute of Electronics Engineers of Korea-System and Control, Vol. 47, No. 1, pp. 67-75, 2010.
- 6.
Lim, J. H. and Kang, S. K., “Non-Inertial Sensor-Based Outdoor Localization for Practical Application of Guide Robots,” Journal of the Korean Society for Precision Engineering, Vol. 34, No. 5, pp. 315-321, 2017.
10.7736/KSPE.2017.34.5.315
- 7.
Chiang, K. W. and Huang, Y. W., “An Intelligent Navigator for Seamless INS/GPS Integrated Land Vehicle Navigation Applications,” Applied Soft Computing, Vol. 8, No. 1, pp. 722-733, 2008.
10.1016/j.asoc.2007.05.010
- 8.
Ohno, K., Tsubouchi, T., Shigematsu, B., Maeyama, S., and Yuta, S.i., “Outdoor navigation of a Mobile Robot between Buildings based on DGPS and Odometry Data Fusion,” Proc. of the International Conference on Robotics and Automation, pp. 1978-1984, 2003.
- 9.
Agrawal, M. and Konolige, K., “Real-Time Localization in Outdoor Environments Using Stereo Vision and Inexpensive GPS,” Proc. of the 18th International Conference on Pattern Recognition, pp. 1063-1068, 2006
10.1109/ICPR.2006.962
- 10.
Deelertpaiboon, C. and Parnichkun, M., “Fusion of GPS, Compass, and Camera for Localization of an Intelligent Vehicle,” International Journal of Advanced Robotic Systems, Vol. 5, No. 4, p. 46, 2008.
10.5772/6231
- 11.
Kümmerle, R., Triebel, R., Pfaff, P., and Burgard, W., “Monte Carlo Localization in Outdoor Terrains Using Multilevel Surface Maps,” Journal of Field Robotics, Vol. 25, Nos. 6‐7, pp. 346-359, 2008.
10.1002/rob.20245
- 12.
Limsoonthrakul, S., Dailey, M. N., and Parnichkun, M., “Intelligent Vehicle Localization Using GPS, Compass, and Machine Vision,” Proc. of the IEEE/RSJ International Conference on Intelligent Robots and Systems, pp. 3981-3986, 2009.
10.1109/IROS.2009.5354042
- 13.
Ji, Y. H., Bae, J. H., Song, J. B., Ryu, J. K., and Baek, J. H., “Outdoor Localization through GPS Data and Matching of Lane Markers for a Mobile Robot,” Journal of Institute of Control, Robotics and Systems, Vol. 18, No. 6, pp. 594-600, 2012.
10.5302/J.ICROS.2012.18.6.594
- 14.
Julier, S. J. and Uhlmann, J. K., “New Extension of the Kalman Filter to Nonlinear Systems,” Proc. of the 11th International Symposium on Aerospace/Defense Sensing, Simulation and Controls, pp.182-193, 1997.
10.1117/12.280797
- 15.
Xu, Q., Li, X., and Chan, C. Y., “A Cost-Effective Vehicle Localization Solution Using an Interacting Multiple Model-Unscented Kalman Filters (IMM-UKF) Algorithm and Grey Neural Network,” Sensors, Vol. 17, No. 6, p. 1431, 2017.
10.3390/s17061431
- 16.
Lee, W. S. and Lim, J. H., “Unscented Kalman Filter Based Outdoor Localization of a Mobile Robot,” Journal of the Korean Society for Precision Engineering, Vol. 36, No. 2, pp. 183-190, 2019.
10.7736/KSPE.2019.36.2.183
- 17.
Lee, W. S., Choi, M. H., and Lim, J. H., “Extended Kalman Filter Based 3D Localization Method for Outdoor Mobile Robots,” Journal of the Korean Society for Precision Engineering, Vol. 36, No. 9, pp.851-858, 2019.
10.7736/KSPE.2019.36.9.851
- 18.
Julier, S. J., “The Scaled Unscented Transformation,” Proc. of the American Control Conference, pp. 4555-4559, 2002.
10.1109/ACC.2002.1025369
Biography
- Woo Seok Lee
Senior researcher in the Department of Mechatronics Engineering, Jeju National University. His research interest is Intelligent Robot.
- Min Ho Choi
Ph.D. candidate in the Department of Mechatronics Engineering, Jeju National University. His research interest is Intelligent Robot.
- Jong Hwan Lim
Professor in the Department of Mechatronics Engineering, Jeju National University. His research interest is Intelligent Robot.