ABSTRACT
For years, crane, a chain block, an elevator and a forklift truck have been developed and used to carry heavy loads, but manpower needed where heavy equipment use is not practical. Aging workers suffer from musculoskeletal disorders, and are helped by developing various muscle assisting wearable robots. Industrial wearable robots must meet the payload capacity required for the pilot's overall operation to ensure safety and operational performance. However, the payload capacity of wearable robot using rotary actuator or linear actuator at the knee joint decreases dramatically in the knee-flexion posture, with reduced moment arms. To solve this problem, the author recommends using Single Acting Hydraulic Telescopic Cylinder Electro Hydrostatic Actuator (SAT-EHA) to increase the torque of the knee in the knee flexion position. The characteristic of telescopic cylinder is high speed in 1st stage and high force in 2nd stage. The Human Universal Mobility Assist-Hybrid (HUMA-H) was developed by designing and fabricating the waist joint to balance the front and rear directions using an electric motor driver. As the payload capacity increases, the robot pilots can squat and stand up with heavy loads. The performance was verified through the operation test and respiratory gas analysis test of the manufactured HUMA-H.
-
KEYWORDS: Wearable robot, Single acting telescopic cylinder, Heavy load, Knee joint, Electro hydrostatic actuator
-
KEYWORDS: 착용 로봇, 단동다단실린더, 중량물, 무릎관절, 전기유압 일체형 구동기
NOMENCLATURE
Cross-sectional area of the cylinder
Force produced by the knee joint torque
Moment arm of the actuating force
Length parameters of the link
Angle parameters of the link
1. 서론
아주 오래 전부터 무거운 물건을 들고 운반하기 위해 거중기, 체인블록, 승강기, 지게차와 같은 많은 장비들이 개발되었다. 그럼에도 불구하고 아직 중장비 도입이 어려운 산업환경에서는 사람이 직접 운반해야 하는 작업들이 많다. 그리고 급속도로 진행되는 고령화로 인해 산업 현장 노동자들의 근골격계 질환이 증가하고 있다.
1 근골격계 질환을 예방하기 위하여 다양한 근력 보조 착용 로봇이 많이 개발되고 있다.
UC Berkeley 대학에서 개발된 Berkeley Lower Extremity Exoskeleton
2 (BLEEX)는 착용자가 34 kg의 무게를 들며 약 1.3 m/s의 속도로 보행이 가능하다. 현대자동차 그룹에서 개발된 Human Universal Mobility Assist
3 (HUMA)는 다중링크구조의 생물학적 무릎관절 설계를 통하여 20 kg의 무게를 매고 약 2.78 m/s의 속도로 달리기가 가능하다. 대우조선해양에서 개발된 Daewoo Shipbuilding & Marine Engineering Hydraulic Wearable Robot
4 (DSME HWR)은 무릎관절에 유압실린더와 스프링구조를 이용하여 무릎 각도 0-120
o 구간에서 중량물 35 kg을 들어올릴 수 있다. 사이버다인에서 개발된 Hybrid Assistive Limb-5
5 (HAL-5)은 모터구동기와 생체신호를 이용하는 전신형 착용 로봇으로 70 kg을 들고 버틸 수 있다.
하지형 착용 로봇은 사용 목적에 따라 적합한 구동기 선정이 중요하다. 군사용으로 빠른 이동이 목적이면 저소음의 빠른 속도의 구동기를 적용하고, 장애인 재활용 사용 목적인 경우 청결하며 안정적인 구동기가 요구된다. 산업 현장에서 반복적으로 무거운 중량물을 들고 옮기는 작업에는 보다 큰 힘을 지원해주는 구동기가 필요하다.
본 연구에서는 중량물 취급을 위한 산업용 착용 로봇 개발이 목적이다. 일반적으로 중량물을 수직 방향으로 들어올리기 위해 허리 굽혀 들기와 무릎 굽혀 들기 자세로 나눌 수 있다. 대부분 산업 현장의 중량물의 무게를 허리 굽혀 들기 자세로 작업을 하면 근골격계 질환을 겪게 된다.
따라서 권장 자세인 무릅 굽혀 들기 자세로 중량물을 들기 위해 무릎관절에 큰 토크가 필요하다. 그래서 무릎관절 구동부 설계는 착용 로봇의 수직 방향으로 들어올리는 기능에 중요한 부분이다. 기존의 무릎관절들은 크게 모터 방식과 실린더 방식으로 나누어 볼 수 있다. 일반적으로 모터 구동 방식은 무릎관절에 모터와 감속기를 바로 연결하는 한 축의 단순한 구조이다. 하지만 사람의 무릎관절은 신전운동과 회전운동이 동시에 이루어지는 다축회전 구조이다.
6 모터 구동 방식으로 구현하기에는 다소 복잡한 구조이다.
본 논문에서는 무릎관절에 큰 힘을 낼 수 있는 단동다단실린더 SAT와 전기유압구동기 EHA 유압시스템을 적용하여 무릎관절의 전 회전 구간에서 목표치 이상의 토크를 가지도록 하였고, 기구적 다축 조인트로 인체와 유사한 다축회전 조인트를 가진다. 허리관절에는 전기모터 구동기를 사용하여 앞뒤 방향에 대한 균형을 잡을 수 있도록 설계 및 제작하여
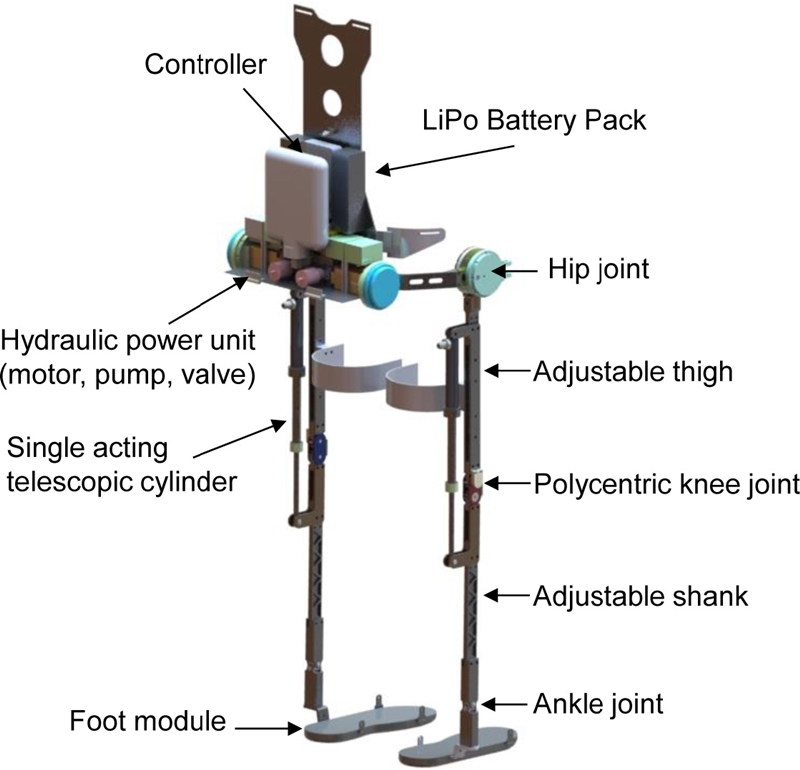
Fig. 1과 같이 전기 및 유압 동력원을 복합적으로 사용한 Human Universal Mobility Assist-Hybrid (HUMA-H)를 개발 하였다. 그리고 제작된 HUMA-H의 동작특성실험 및 호흡가스 분석 실험을 통해 정량적 성능검증을 실시하였다.
Fig. 1 HUMA-H with 20 kg payload on the torso

2. 하지형 착용 로봇 설계 및 제작
2.1 단동다단실린더를 가진 착용 로봇(HUMA-H) 설계
Fig. 2는 본 연구에서 개발된 HUMA-H의 주요 구성품을 보여준다. 로봇의 전체 크기는 너비 400, 높이 1400, 깊이 400 mm로 사람이 착용했을 때 어깨, 허리, 허벅지 그리고 발 하네스로 체결이 된다. 프레임은 경량화를 위해 알루미늄으로 제작하였으며 허벅지와 정강 이링크는 길이 조절이 가능하도록 하였다.
Fig. 2Elements of the HUMA-H
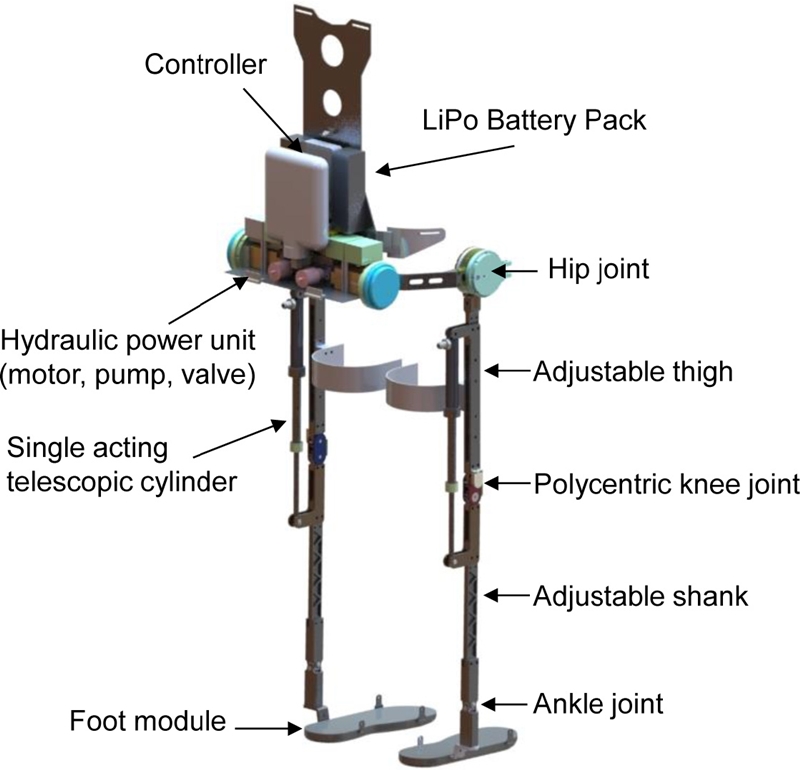
전체 무게는 배터리 포함하여 약 14 kg이며 외부의 동력원 없이 독립적으로 구동할 수 있다. 허리관절에는 고성능 BLDC 모터와 50 : 1 하모닉 감속기를 구동기로 선정하였으며, 무릎관절에는 단동다단실린더가 사용된다. 유압력은 EHA로부터 생성되며 NI myRIO 제어기에서 모터 및 유압제어가 이루어진다. 마지막으로 허리관절과 무릎관절 각도 측정을 위한 절대식 엔코더, 등판의 기울기 측정을 위한 IMU, EHA 유압력을 측정하기 위한 유압센서, 착용자 보행 상태 확인을 위한 발 센서 등 다양하고 많은 센서가 사용된다. 참고로, 로봇의 전반적인 사양을
Table 1에 나타내고, 로봇의 각 관절의 자유도는
Table 2에 나타내었다.
Table 1Specifications of the HUMA-H
Table 1
|
Dimensions |
400 × 1400 × 400 mm |
|
Mass |
14 kg |
|
Battery |
Li-po 44.4 V 3 Ah |
|
Actuator |
4 × 48 V BLDC motor, 250 W
2 × SAT cylinder |
|
Main controller |
NI MyRIO, Dual-core ARM Cortex-A9
real-time processing |
|
Sensor |
4 × Magnetic absolute encoder
2 × Pressure sensor, 2 × Insole sensor
1 × Inertial Measurement Unit (IMU) |
Table 2Ranges of Motion (ROMs) of the HUMA-H
Table 2
|
Descriotion |
Valve [deg] |
|
Active hip flexion/extension |
-90-140 |
|
Free passive hip yaw |
-20-40 |
|
Free passive hip roll |
0-35 |
|
Active knee flexion/extension |
5-140 |
|
Passive ankle dorsi/plantarflexion |
-120-120 |
|
Passive ankle eversion/inversion |
-45-45 |
2.2 EHA 시스템 설계
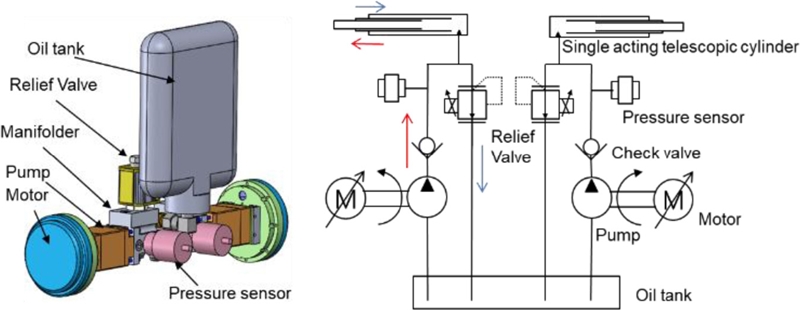
전기구동 방식 착용 로봇의 경우 외부 충격에 의해 무릎관절의 감속기가 파손될 문제점을 가지고 있다. 이러한 문제를 해결하며 고출력을 낼 수 있는 방법으로 유압시스템을 적용하는 것이다. 일반적인 유압시스템은 외부에 부피가 큰 파워 팩을 구성하지만, HUMA-H는 유압 구성품을 일체화하여 휴대 가능한 EHA 시스템을 사용한다.
7
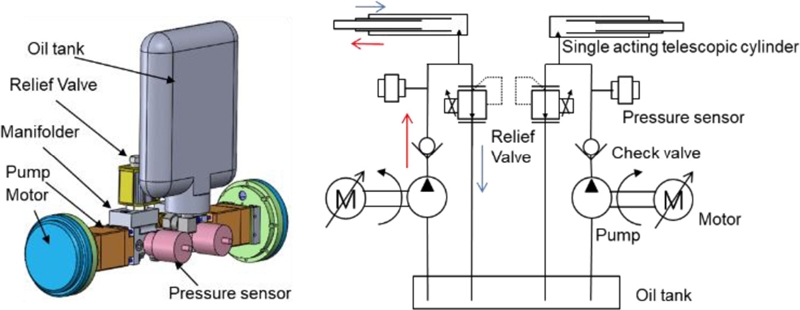
EHA 시스템은 전기모터, 유압펌프, 밸브, 압력센서, 기름탱크, 그리고 체크밸브 등의 구성을 일체화하여
Fig. 3과 같이 매우 컴팩트한 구조를 가진다. 유압실린더의 작동 방향 및 추력제어는 모터 구동을 하게 되면 압력이 증가하게 되고, 밸브를 개방하게 되면 압력은 감소하게 된다. 펌프와 직결된 전기모터의 전류제어를 통해 유압실린더의 추력을 발생하고 기구적으로 무릎관절의 토크가 구현된다.
Fig. 3EHA system of HUMA-H
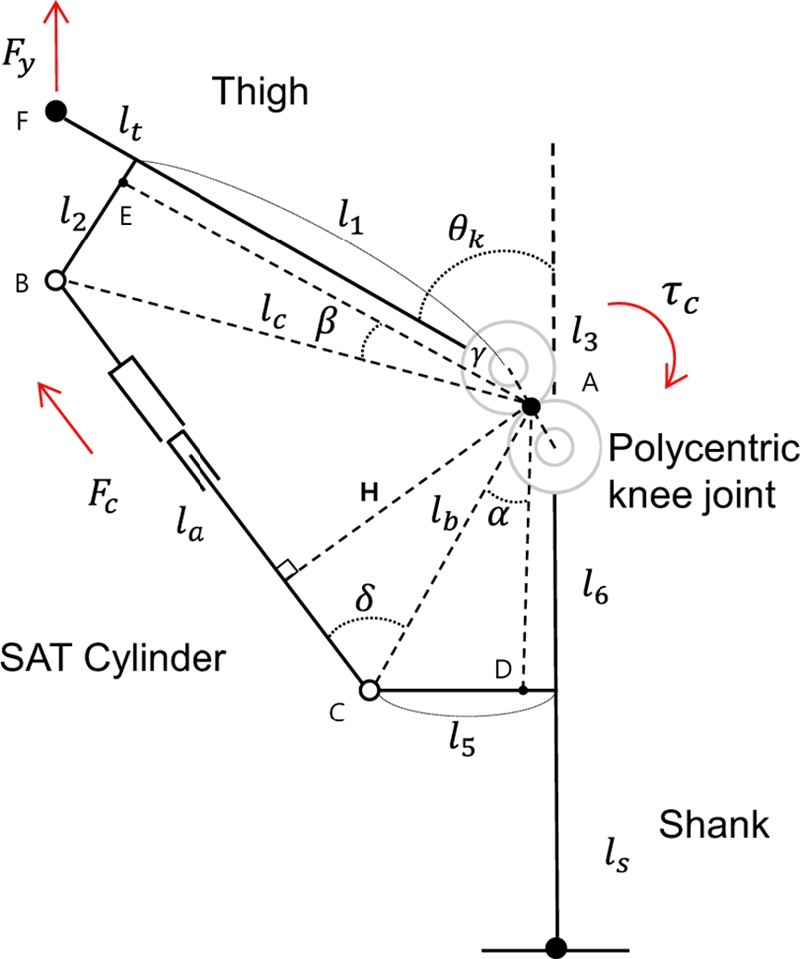
2.3 무릎관절 구조 설계
HUMA-H의 무릎관절은 기어와 단동다단유압실린더가 결합된 이중관절 구조를 가진다.
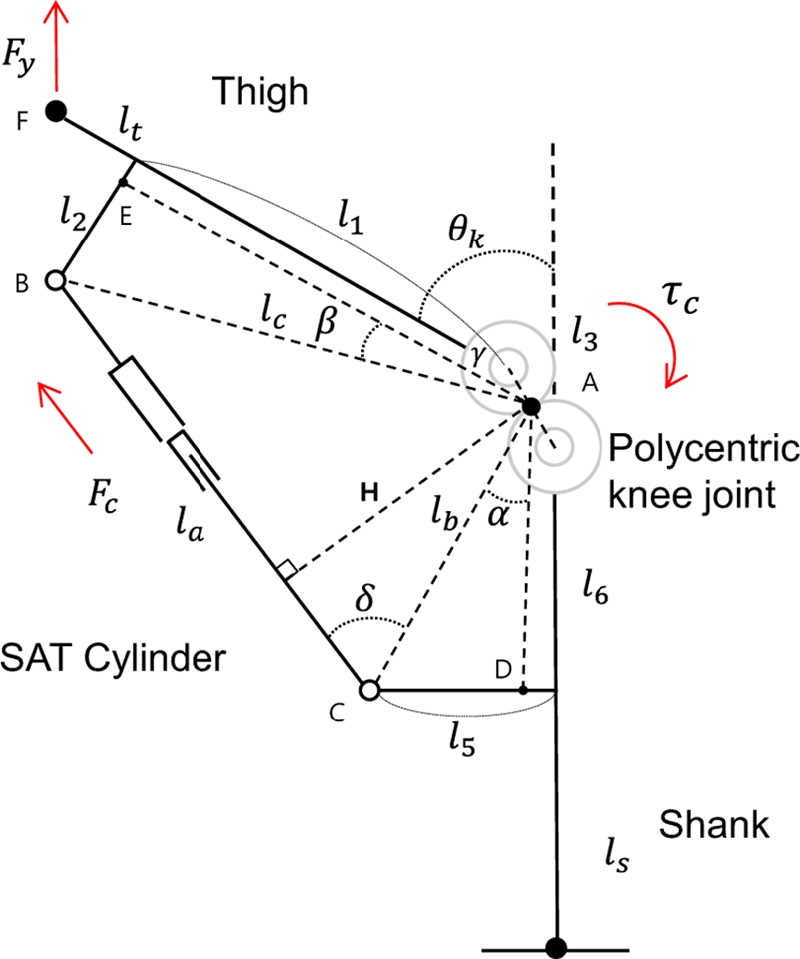
Fig. 4에서 개략도와 기구학적 변수를 나타낸다. EHA의 전기모터에 전류(
I)를 인가하게 되면 펌프가 회전하여
식(1)에서와 같이 모터상수(
Kt), 펌프의 회전당 토출량(
Vm), 용적효율(
ηtot)에 의해 유압력(
Pc)이 생성된다. 발생된 압력은 단동다단유압실린더의 길이(
la)를 변하게 하는 힘(
Fc)이 되며, 무릎 관절각도(
θk)는 무릎 회전축에 설치되어 있는 절대 엔코더로 측정된다. 이때 링크 구조적으로 실린더와 무릎관절 회전 중심 간의 거리(H)가 변하며
식(2)부터
식(7)에 의해 링크의 변위와 각도를 구하며
식(8)에 의해 무릎관절의 토크(
τc)를 구할 수 있다.
θk에 따른 토크 변화는 다음
식(1)부터
식(8)을 따른다.
Fig. 4Schematic drawing and kinematic parameters of the knee joint
결론적으로 모터의 전류제어를 통해 무릎관절의 토크를 제어할 수 있다. 그리고 무릎관절에 의해 수직 방향으로 들 수 있는 수직 힘(
Fy)은 다음
식(11)과 같이 구할 수 있다.
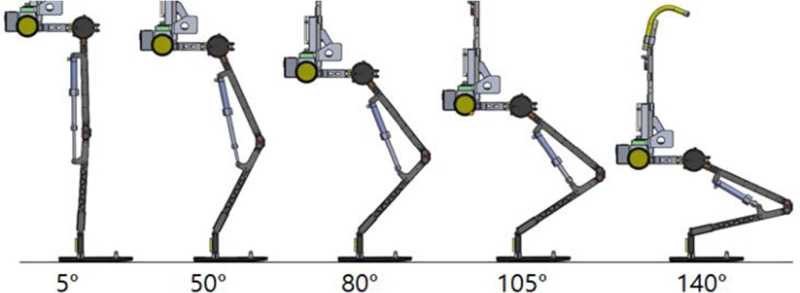
Fig. 5에서 무릎 각도 초기 5에서 140
o까지 실린더 행정에 따른 자세를 보여준다. 5에서 80
o까지 유압실린더 1단이 사용되고, 80에서 140°까지 유압실린더 2단이 사용된다.
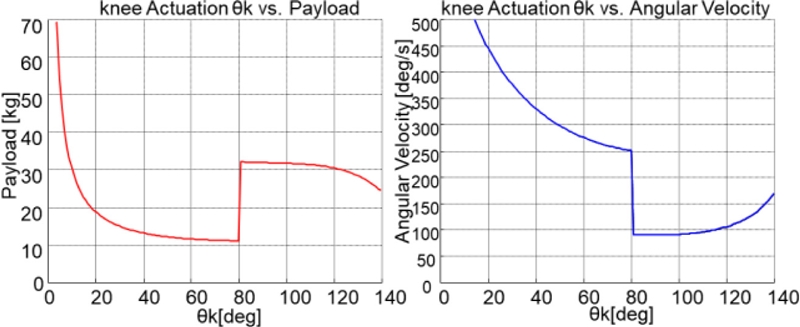
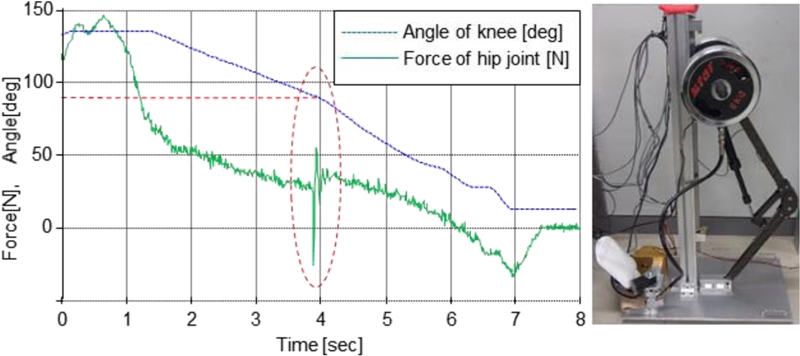
Fig. 6은 유압 30 bar에서 무릎관절의 수직으로 들 수 있는 수직힘(
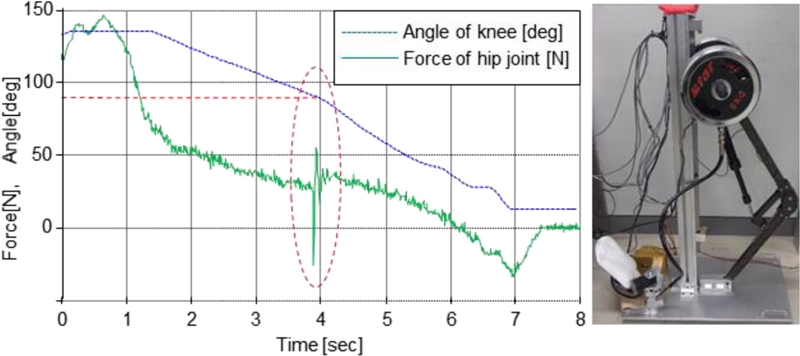
Fy)과 각속도의 시뮬레이션 결과를 보여준다. 다단실린더의 특징으로 무릎 각도 약 80°에서 단 변화를 볼 수 있다. 무릎 각도 80° 이상에서 2단 실린더의 단면적이 넓어짐으로 힘은 증가하고 속도는 줄어드는 특징을 가진다. 이는 착용 로봇이 앉은 자세에서 무거운 물건을 들어올리는 작업에서 보다 큰 힘을 낼 수 있고, 보행 시에는 무릎 각도 80° 이하의 1단 실린더로 빠른 동작을 할 수 있는 장점을 가진다. 앉고 일어서는 동작에서 실린더 단변환 시 유압력의 순간 변화를 가진다. 이는
Fig. 7의 다단실린더 단독 실험 결과에서와 같이 순간적인 힘 변화는 있지만, 각도 값의 변화가 없어 착용자의 불편함은 없다.
Fig. 5SAT cylinder operation of HUMA-H
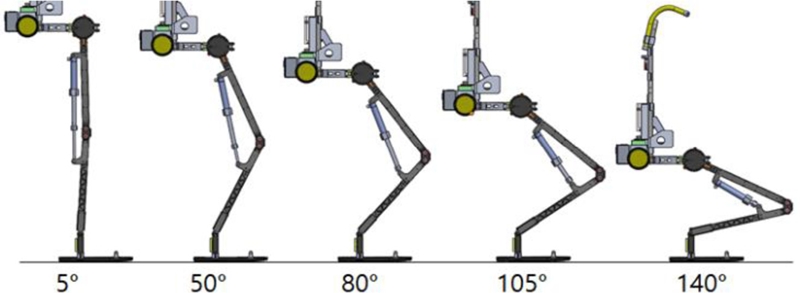
Fig. 6Simulation results of payload capacities of knee joint
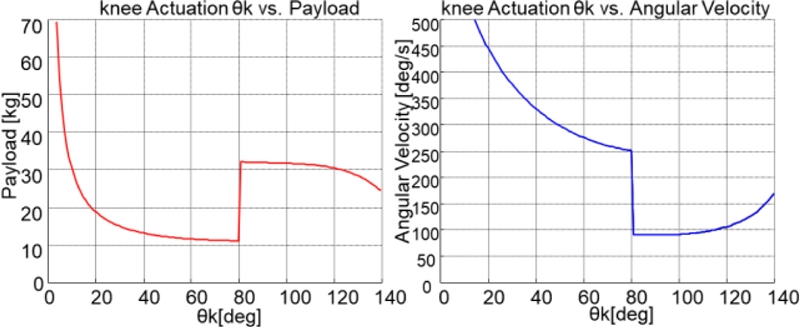
Fig. 7Test results of payload (10 kg) capacities of knee joint
2.4 무릎관절 링크 최적화 설계
링크로 연결된 HUMA-H의 이중관절 구조 무릎관절은 실린더의 행정 거리와 설치 위치에 따라 무릎관절 작동 각도와 발생 가능 토크가 변하게 된다. 따라서 원하는 자유도에서 최고의 성능을 발휘하기 위한 최적화 설계가 필요하다. 본 논문에서는 유전알고리즘 최적화 기법을 사용하였다. 목적함수로는
식(12)와 같이 무릎관절 각도의 작동 구간 40-120° 내에서 들 수 있는 수직 힘의 합이 제일 큰 값의 변수를 선택 하였다. 그리고
Table 3에서와 같이 링크
la,
l1,
l2,
l5,
l6의 제약 조건을 선정하여 최적의 실린더의 설치 위치를 선정할 수 있다.
Table 3Constraints of genetic algorithm and result
Table 3
|
Links |
Constraints [mm] |
Result value [mm] |
|
la
|
206 ≤ la ≤ 450 |
- |
|
l
1
|
290 ≤ l1 ≤ 310 |
295.6 |
|
l
2
|
40 ≤ l2 ≤ 70 |
45.3 |
|
l
5
|
40 ≤ l5 ≤ 70 |
40.8 |
|
l
6
|
80 ≤ l6 ≤ 120 |
104.6 |
2.5 HUMA-H의 제어
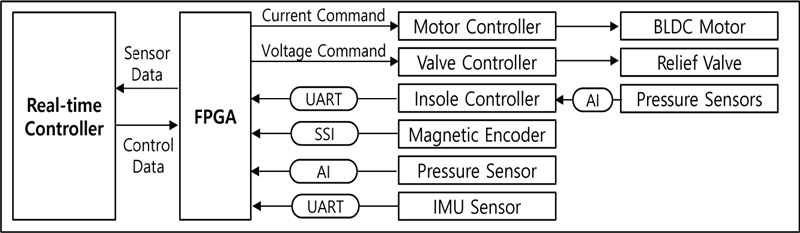
HUMA-H는 자유로운 구동을 위해 배터리와 독립제어기를 사용하고, 모든 센서, 모터, 밸브는 FPGA를 통해 연결되어있다. 주제어기에는 Xilinx FPGA와 듀얼코어 ARM Cortex-A9 프로세서가 포함되어 실시간 1 kHz의 제어주파수로 제어가 된다.
Fig. 8에서 전반적인 제어기 시스템 구성을 보여준다. HUMA-H를 움직이기 위해서 많은 센서의 입력과 복잡한 알고리즘 계산을 통해 얻은 값으로 각 구동기의 명령으로 제어가 된다.
Fig. 8Partitioned computing architecture on controllers for HUMA-H
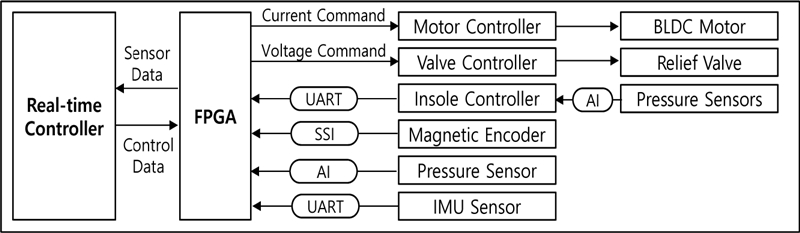
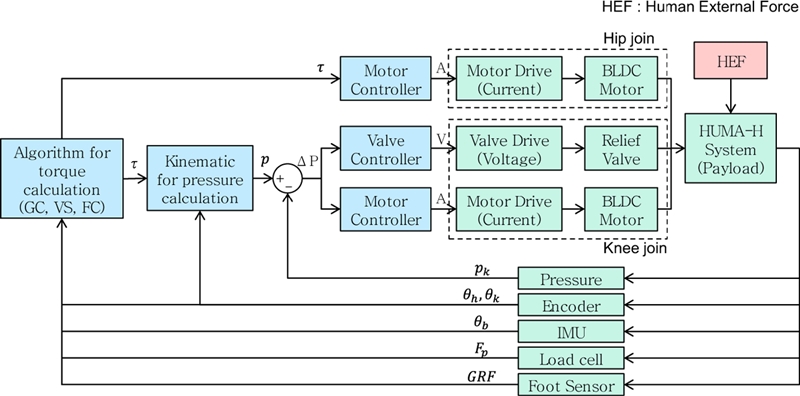
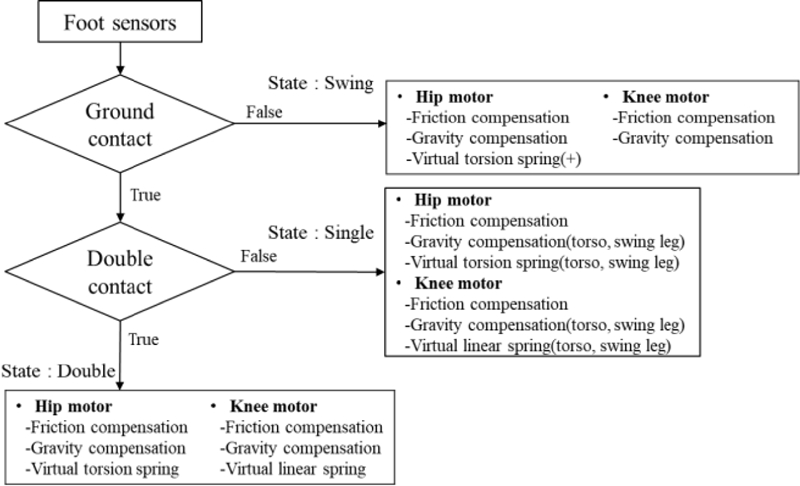
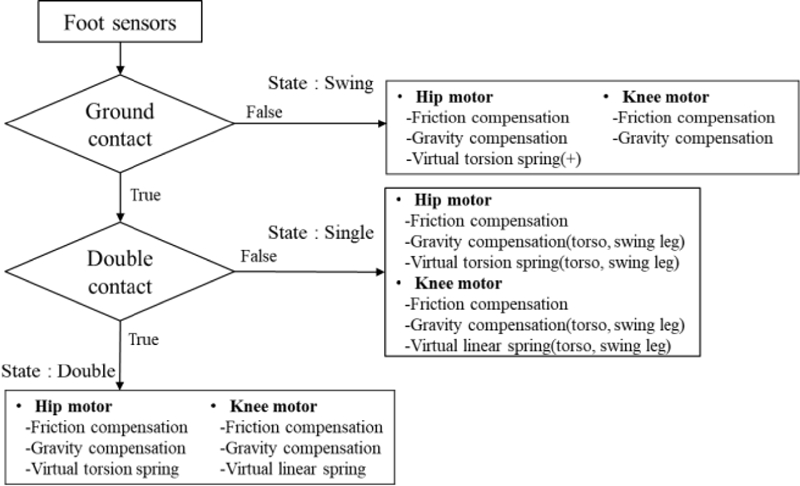
Fig. 9의 제어블록선도와 같이 착용 로봇에 장착된 다양한 센서 값을 받아 각 조인트에 필요 토크를 구하여 모터, 밸브 제어를 통해 착용 로봇 관절을 움직일 수 있다. 그리고 발 센서로부터 로봇의 디딤 상태를 확인 하다. 디딤 상태는 3가지로 지면을 딛지 않은 상태(Swing), 한 발 지지(Single)와 양발 지지(Double) 상태로 구분하여 각 자세에 따라
Fig. 10과 같은 알고리즘이 적용된다. 모든 구동기에 마찰 보상과 중력 보상 알고리즘이 적용되며, 발 센서 디딤 상태에 따라 가상스프링 알고리즘이 적용된다. 발을 딛지 않은 다리는 고관절에 가상토션 스프링력(
τvts)이
식(13)과 같이 적용된다. 초기 각도(
θi)에서 고관절 각도(
θh) 차에 가상 토션 스프링 계수(
kvts) 배로 토크가 생성된다. 디딤발에서 발을 떼는 순간 가상 토션 스프링력이 작용하여 보행에 도움을 준다. 디딤발은
식(15)와 같이 가상 리니어 스프링력(
τvls)이 가상 리니어 스프링 계수(
kvts) 배로 토크가 생성된다. 착용 로봇이 앉는 동작에서 반발력을 높혀 보조해준다. 이와 같이 다양한 센서와 알고리즘으로 균형적이고 안전한 제어가 가능하다.
Fig. 9Control block diagram of the HUMA-H
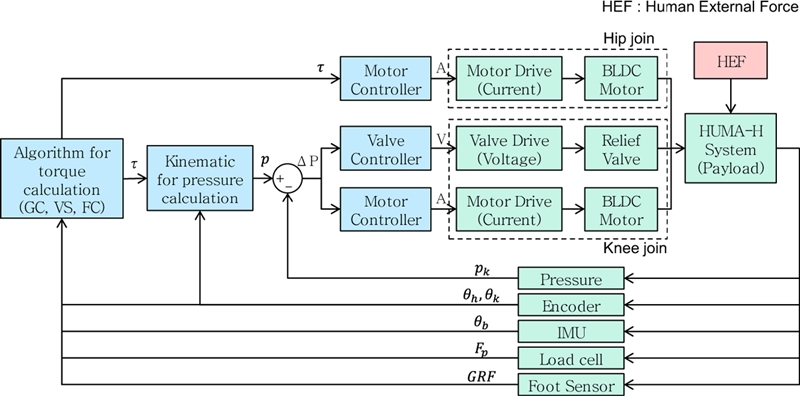
Fig. 10Flow chart of the main control algorithm
3. 실험 결과
3.1 기본 동작 실험
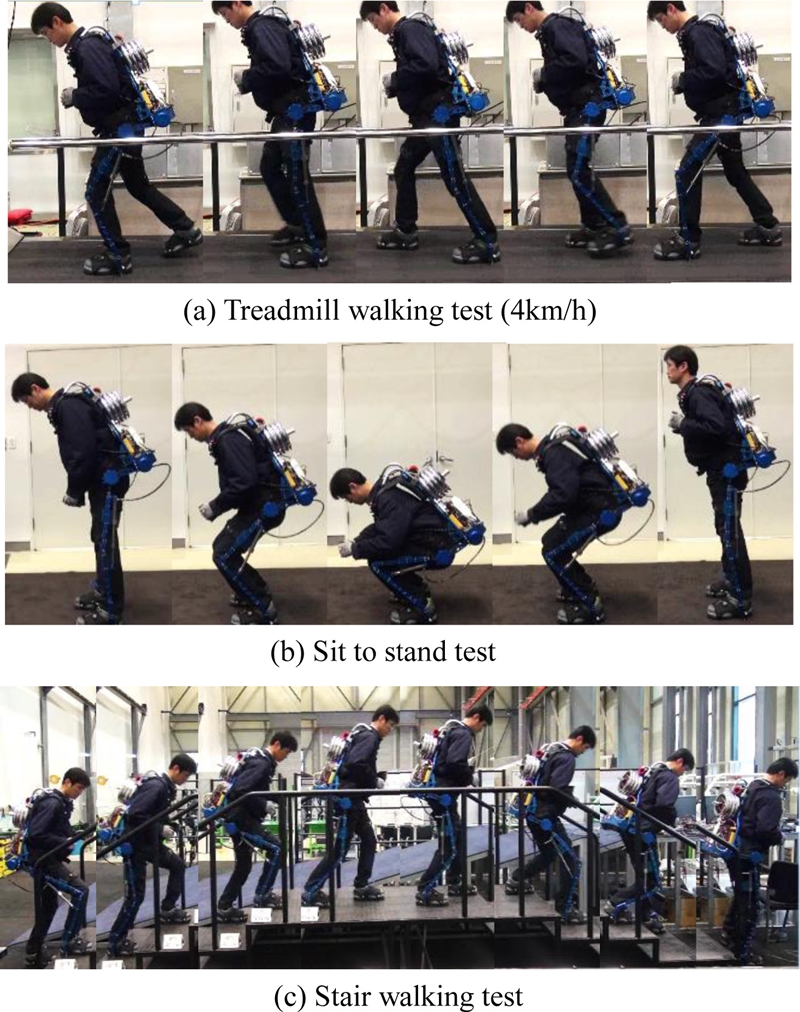
HUMA-H의 성능을 검증하기 위하여,
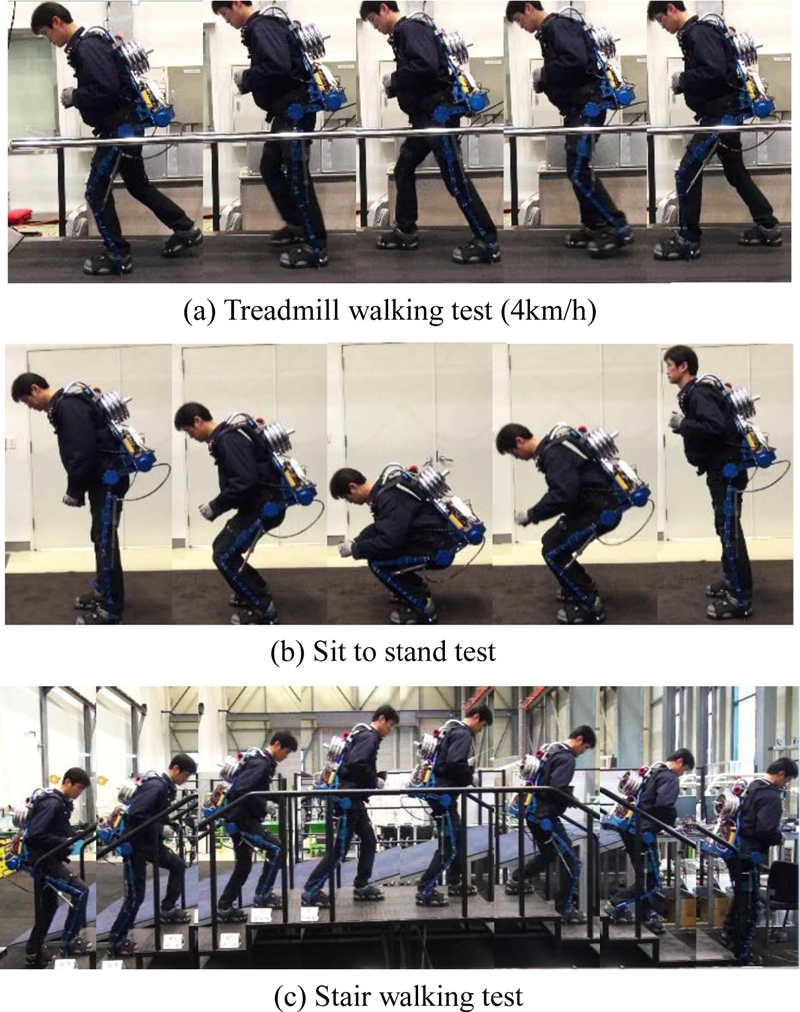
Fig. 9와 같이 20 kg 중량물을 HUMA-H의 등에 매고 기본 동작 실험을 하였다. 각 동작 간에는 어떠한 모드 변환이나 추가적인 사항은 필요하지 않다.
Fig. 11(a)의 보행 실험은 트레이드밀에서 4 km/h 가능하였다.
Fig. 11(b)의 앉고 일어서기 동작 실험에서는 HUMA-H의 장점을 확연히 보여준다. 중량물 20 kg을 매고 있음에도 쪼그려 앉은 자세에서 착용자의 어깨에 어떠한 힘을 가하지 않고 있음을 보여준다. 이는 로봇이 중량물을 들고 있음을 뜻한다. 끝으로
Fig. 11(c)의 계단 보행 또한 충분히 가능하다.
Fig. 11Basic motion test of HUMA-H with 20 kg payload on the torso
3.2 호흡가스 분석 실험
착용 로봇이 착용자에게 얼마의 도움을 주는지에 대한 객관적 성능 입증을 위해 산소 소모량을 비교하여 정량적 효과를 분석하였다. 산소 소모량은 호흡가스 분석기(MetaMax 3B, CORTEX, Germany)를 사용하여 측정하였다. 실시간으로 데이터를 수집, 분석할 수 있는 MetaMax 3B 호흡가스 분석기는 호흡상의 산소(O2)와 이산화탄소(CO2)의 농도를 측정할 수 있는 감지기가 있다. 이를 컴퓨터와 연결시켜 안정 시와 운동 시 호흡순환기능의 변인들을 혼합 챔버(Mixing Chamber)인 호기가스 추출법으로 호기마다 측정할 수 있고, 자동분석 프로그램 (MetaSoft)으로 산소 소비량(Oxygen Consumption, VO2), 호흡교환율(Respiratory Exchange Ratio, RER), 심박수(Heart Rate, HR) 등을 산출할 수 있다.
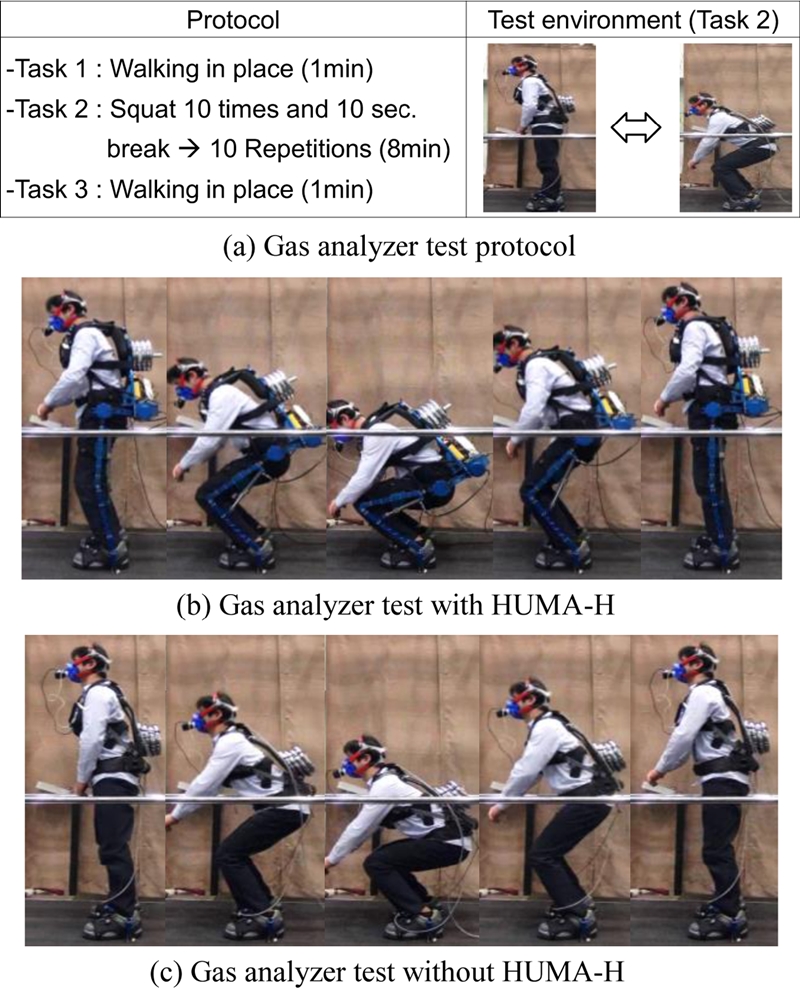
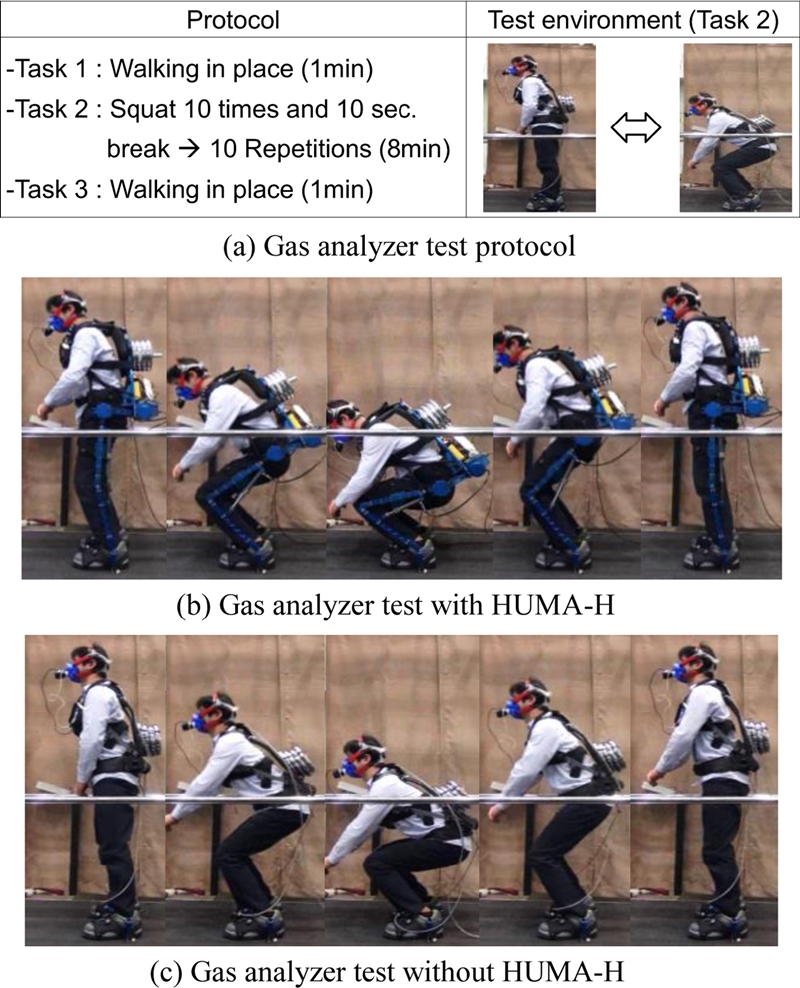
호흡가스 분석기 실험을 위해
Fig. 12(a)와 같이 프로토콜을 선정하였다. 먼저 20 kg을 등에 매고 준비 운동으로 제자리걸음 1분을 실시한다. 다음 앉고 일어서기 동작을 10회 수행 후 10초간 휴식으로 반복적으로 총 100회 수행한다. 그리고 마지막으로 제자리걸음 1분으로 마무리 운동을 하였다. 이와 같은 프로토콜로 HUMA-H를 착용했을 때와 착용하지 않았을 때를 비교 분석하였다. 각 실험 간 1시간 휴식 시간을 가졌으며
Figs. 12(b)와
12(c)에서 동작 모습을 보여준다.
Fig. 12Gas analyzer test with 20 kg payload on the torso
그 결과
Table 4에서 보듯이 로봇을 착용한 경우 착용하지 않은 경우보다 Task 1에서 산소 소모량이 0.12에서 0.22로 증가함을 볼 수 있다. 이는 착용 로봇을 착용함이 제자리걸음에서 보다 불편함이 나타남을 알 수 있다. 하지만, Task 2에서 산소 소모량이 0.84에서 0.78 감소를 보이며 심박 변화량(Task 3-Task 1) 또한 38에서 25로 낮음을 보인다. 이 결과로 HUMA-H가 착용자에게 중량물을 들 때 도움이 되고 있음을 정량적으로 알 수 있다.
Table 4Constraints of genetic algorithm and result
Table 4
|
Task |
VO2
|
RER |
HR |
|
Without WR |
1 |
0.12 |
0.91 |
95 |
|
2 |
0.84 |
1.08 |
119 |
|
3 |
0.78 |
1.15 |
133 |
|
With WR |
1 |
0.22 |
0.91 |
104 |
|
2 |
0.78 |
1.06 |
118 |
|
3 |
0.76 |
1.16 |
129 |
4. 결론
본 연구에서는 산업 현장의 중량물 운반 시 근골격계 질환을 예방하기 위한 하체 근력을 지원할 수 있는 착용 로봇을 개발하였다. 특히, 쪼그려 앉은 자세에서도 근력 지원 가능한 착용 로봇 개발로 무릎관절의 높은 토크 발생을 위해 단동다단유압실린더를 사용한 새로운 무릎관절을 설계하여 적용하였다. 단동다단실린더의 적용 특징으로 보행 시 단면적이 작은 1단 실린더로 빠른 동작이 가능하며, 앉은 자세에서 중량물을 들어올릴 때는 단면적이 넓은 2단 실린더로 큰 힘으로 들 수 있다. 그러므로 무릎 각도 전 구간에서 근력 지원 가능한 착용 로봇을 개발하였다. 또한 개발된 로봇이 착용자에게 얼마의 도움을 주는지에 대한 정량적 성능 입증을 위해 호흡가스 분석기를 통한 산소 소비량을 비교하여 로봇이 착용자에게 도움을 주고 있음을 입증하였다. 추후 연구로는 보다 많은 대상자에 대한 효과도 분석을 통해 신뢰도가 높은 결과를 도출할 필요가 있다.
REFERENCES
- 1.
Yang, Y., “The Responding Strategies of Musculorskeletal Disease in Aging Society,” Journal of the Ergonomics Society of Korea, Vol. 29, No. 4, pp. 505-511, 2010.
10.5143/JESK.2010.29.4.505
- 2.
Steger, R., Kim, S. H., and Kazerooni, H., “Control Scheme and Networked Control Architecture for the Berkeley Lower Extremity Exoskeleton (Bleex),” Proc. of the IEEE International Conference on Robotics and Automation, pp. 3469-3476, 2006.
- 3.
Hyun, D. J., Park, H., Ha, T., Park, S., and Jung, K., “Biomechanical Design of an Agile, Electricity-Powered Lower-Limb Exoskeleton for Weight-Bearing Assistance,” Robotics and Autonomous Systems, Vol. 95, pp. 181-195, 2017.
10.1016/j.robot.2017.06.010
- 4.
Choo, J. and Park, J. H., “Increasing Payload Capacity of Wearable Robots Employing Linear Actuators and Elastic Mechanism,” International Journal of Precision Engineering and Manufacturing, Vol. 18, No. 5, pp. 661-671, 2017.
10.1007/s12541-017-0079-3
- 5.
Sankai, Y., “HAL: Hybrid Assistive Limb based on Cybernics,” Robotics Research, Vol. 66, pp. 25-34, 2010.
10.1007/978-3-642-14743-2_3
- 6.
Smith, P. N., Refshauge, K. M., and Scarvell, J. M., “Development of the Concepts of Knee Kinematics,” Archives of Physical Medicine and Rehabilitation, Vol. 84, No. 12, pp. 1895-1902, 2003.
10.1016/S0003-9993(03)00281-8
- 7.
Lee, J. M., Park, S. H., Park, M. G., and Kim, J. S., “A Position Control of EHA Systems Using Adaptive PID Sliding Mode Control Scheme,” Journal of the Korea Society for Power System Engineering, Vol. 17, No. 4, pp. 120-130, 2013.
10.9726/kspse.2013.17.4.120
Biography
- Dong-Hyun Jeong
Senior Research Engineer in the Robot Development Team, R&D Center, Hyundai Rotem. His research interest is Wearable robot, Rehabilitation robot.
- Do-Yeon Kang
Research Engineer in the Robot Development Team, R&D Center, Hyundai Rotem. Her research interest is Wearable robot control and sensor.
- Ji-Seok Lee
Senior Research Engineer in the Robot Development Team, R&D Center, Hyundai Rotem. His research interest is Wearable robot, Exoskeleton suit.