ABSTRACT
The lifting-and-lowering type drone station is very useful when lifting and lowering the battery charging station for safe installation, maintenance, and energy efficiency of drone operation. Therefore, understanding the coupling motion between cable and pulley is important for evaluating characteristics like safety and dynamic stability of the lifting-and-lowering type drone station. Although multibody dynamics (MBD) is widely used for numerically analyzing the dynamic behavior of interconnected bodies, attempts to analyze the coupling motion between cable and pulley have been made only recently, within the last decade. Therefore, this paper attempts to develop the MBD model for the lifting-and-lowering type drone station, including cables, pulleys, and winches using MotionSolve (Altair). The results of the winch torque obtained analytically and numerically were compared to verify the effectiveness of the proposed MBD model.
-
KEYWORDS: Drone station, Lifting-and-lowering-type pole, Multibody dynamic analysis, Cable-Pulley system, Battery charging station
-
KEYWORDS: 드론 스테이션, 승하강기, 다물체 동역학 해석, 케이블-풀리시스템, 충전포트
1. 서론
초기 군사용으로 개발된 드론은 최근 4차 산업혁명으로 인하여 IoT 기술과 결합하면서 농업, 광업, 치안, 물류, 에너지, 방송 산업 등 민간 분야로 그 생태계를 광범위하게 확장하고 있다.
1,2 하지만 기존 배터리 드론의 짧은 비행시간 문제는 드론 산업이 지속적으로 성장하기 위해서 넘어야할 중요한 관문으로 대두되고 있다. 이러한 전기 배터리 드론의 짧은 비행시간을 보완하기 위해 수소연료전지, 하이브리드, 태양열, 유선, 무선 충전 방식 등 새로운 전력공급 방식을 도입하려는 연구가 시도되고 있다.
3 이러한 새로운 대안들이 효과적으로 비행시간을 늘렸지만 이제 연구를 시작하는 단계이기 때문에 아직 활용의 실제적 효과가 얼마나 클 것인지를 제대로 판단하기는 어렵다. 수소연료전지 드론의 경우 수소 충전소가 없을 경우 외부 업체에서 연료전지를 주문하는 방식으로 에너지가 공급되므로 비행 방식에 따라 전기 배터리보다 효율 및 경제성이 낮아질 수 있다.
4,5 그리고 엔진과 모터를 함께 사용하는 하이브리드 드론의 경우 엔진 소음 및 이착륙 문제가 존재하는 것으로 보고되었다.
6 그 외 유선방식으로 전원을 공급하는 드론과 레이저 빔을 이용하여 무선으로 충전하는 드론은 비행 반경의 제약이 크다.
6-8 따라서 드론이 배터리를 충전하기 위해 작업자에게 복귀하는 대신 충전판에서 무인으로 전원을 공급받을 수 있는 드론 스테이션에 대한 연구가 주목받고 있다.
9 무선 충전 기술은 자기 유도 혹은 자기 공명 방식으로 분류되며 드론의 전원을 무인으로 충전하므로 임무수행 능력과 생산성을 크게 향상시킬 수 있다. 실제로 아마존은 복합 운송기관 유지보수, 수직 구조물을 이용한 다목적 도킹 스테이션에 대한 특허를 등록하여 미래 물류산업에서 드론 스테이션을 활용하기 위한 노력을 기울이고 있다.
10-12 기존에 개발된 드론 스테이션은 고정형으로 설치 위치에 따라서 지리적 상충 관계가 존재한다. 예를 들어 정비성을 확보하기 위해 낮은 평지에 설치할 경우 산간, 오지, 도심지에 존재하는 사람 또는 구조물, 나무들로 인하여 드론이 정상적으로 비행하는 것이 힘들 수 있다. 이러한 지리적 상충관계를 극복하기 위하여
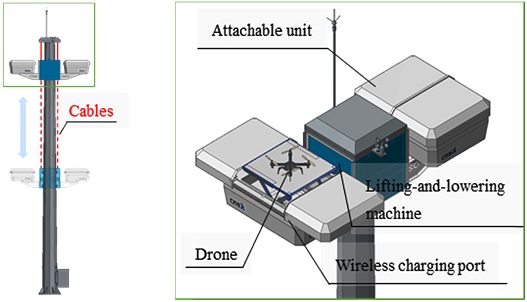
Fig. 1과 같이 케이블-풀리 방식의 승하강기에 드론 스테이션을 결합하여 충전판의 높이를 지상 10 m까지 자유롭게 조절할 수 있는 승하강식 드론 스테이션을 개발하였다.
13 승하강기는 링크 어셈블리를 지그재그(Zigzag)로 엮은 케이블을 이용하여 중량물을 폴의 외주면에 강하게 밀착시켜 안정적으로 수직 운반한다. 따라서 제작 전 단계에서 동적 안정성과 강도에 대하여 충분한 검토가 필요하다.
Fig. 1 Lifting-and-lowering-type drone station

컴퓨터와 소프트웨어의 발전으로 다물체 동역학 해석 프로그램을 이용하여 복잡한 기구의 동적 특성을 제작 전 설계 단계에서 미리 분석하여 개발 비용을 단축한 사례가 많다.
14-16 그럼에도 불구하고 움직이는 케이블-풀리 메커니즘에 대한 다물체 동역학 해석기법은 비교적 최근에 연구되기 시작하였고, 실제 제품 개발 단계에서 활용된 사례는 거의 전무하다. 따라서, 본 논문은 제작 전 단계에서 구조물의 동적 안정성과 강도를 수치해석으로 평가하기 위해 케이블-풀리 메커니즘을 포함하는 승하강식 드론 스테이션의 다물체 동역학 해석 모델을 구현하였다.
논문의 구성은 다음과 같다. 2장에서는 승하강식 드론 스테이션의 메커니즘에 대한 자세한 설명, 다물체 동역학 해석 모델 및 해석 조건에 관하여 기술하였다. 3장에서는 다물체 동역학 해석으로 계산한 승하강식 드론 스테이션의 동적 안정성과 링크 어셈블리에 대한 강도 결과를 분석 및 검증하였다. 마지막으로 4장에서는 본 연구의 결론을 도출하였다.
2. 승하강식 드론 스테이션
2.1 승하강식 드론 스테이션
드론 스테이션이 지면으로부터 높은 곳에 설치될 경우 비행 장애물을 피할 수 있는 장점이 있지만, 작업자가 장치에 접근하기 어렵기 때문에 유지보수가 어렵다. 이러한 단점을 극복하기 위해 승하강식 드론 스테이션은 케이블을 이용하여 승하강 가능한 형태로 개발되었다.
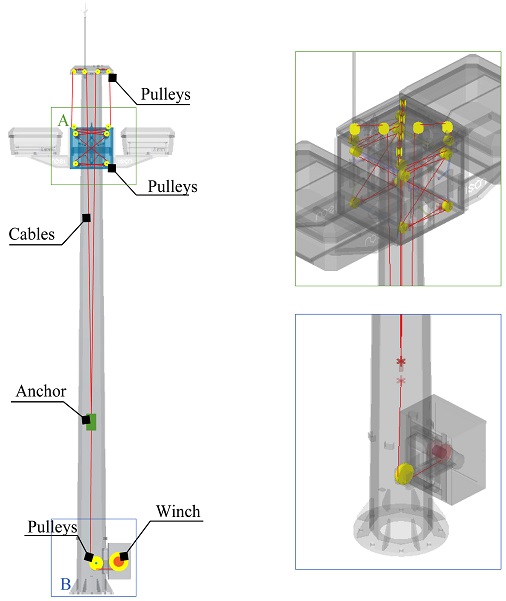
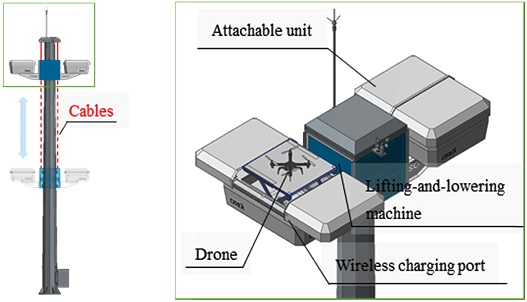
Fig. 2와 같이 승하강기, 무선충전소, 탈부착 유닛으로 승하강식 드론 스테이션은 구성된다. 충전이 필요할 때 드론은 무선충전소에 착륙하여 사람의 도움없이 스스로 배터리를 충전할 수 있다. 탈부착 유닛은 용도나 형태의 제약없이 폐쇄회로 텔레비전 또는 조명 등 다양한 형태로 설계되어 부착될 수 있다.
Fig. 2Schematic of the newly-developed drone station
케이블 방식으로 승하강기를 제작할 경우 간단한 구조와 저렴한 원가로 중량물을 효과적으로 들거나 내릴 수 있다. 하지만 케이블 장치에 외부 풍하중이나 충격이 가해질 경우 중량물이 불안정하게 진동하거나 심각한 경우 사고로 이어질 수 있다. 따라서 승하강기는
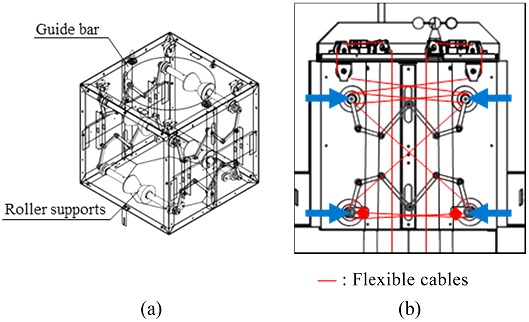
Fig. 3과 같이 승하강 링크 어셈블리(a)와 케이블(b)를 이용하여 승하강 작업 시 구조물이 폴의 외주면에 강하게 밀착되도록 설계하였다.
Fig. 3(a)와 같이 하우징에 부착되어 회전하는 복수의 링크 막대는 승하강기의 롤러 지지바가 폴에 안정적으로 밀착할 수 있도록 운동을 부여한다. 커버에 부착된 가이드바는 복수의 링크 막대의 수평 방향 운동을 제약한다.
Fig. 3(b)와 같이 유연체 케이블은 복수의 링크 막대에 부착된 홈이 있는 바퀴에 묶여져서 지면과 수직한 방향으로 발생하는 구조물 자중을 수평 방향으로 바꾸어 주는 기능을 수행한다.
Table 1과 같이 폴은 강도와 제작 비용을 고려하여 SS275, 승하강기의 내부 링크 어셈블리는 큰 하중이 부여될 것을 고려하여 강도가 높은 S45C, 무선 충전소와 탈부착 유닛은 경량화를 위하여 알루미늄으로 설계하였다.
Fig. 3Mechanisms in the newly-developed lifting-and-lowering machine; (a) Link assembly, and (b) Flexible cables for the lifting-and-lowering mechanism
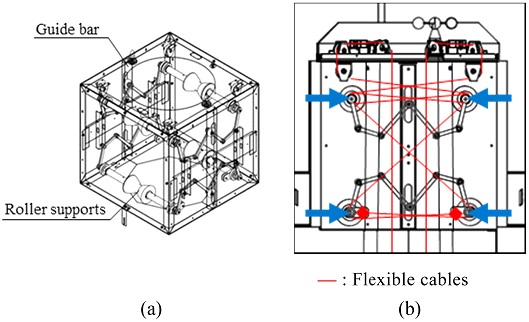
Table 1material properties of the newly-developed drone station
Table 1
|
Label |
Material |
E [GPa]/Sy [MPa] |
|
Pole |
SS275 |
200/275 |
|
Link assembly |
S45C |
200/490 |
|
Attachable units |
Aluminum |
70/70 |
|
Wireless charging port |
Aluminum |
70/70 |
2.2 다물체 동역학 해석 모델
2.2.1 다물체 동역학 해석 이론
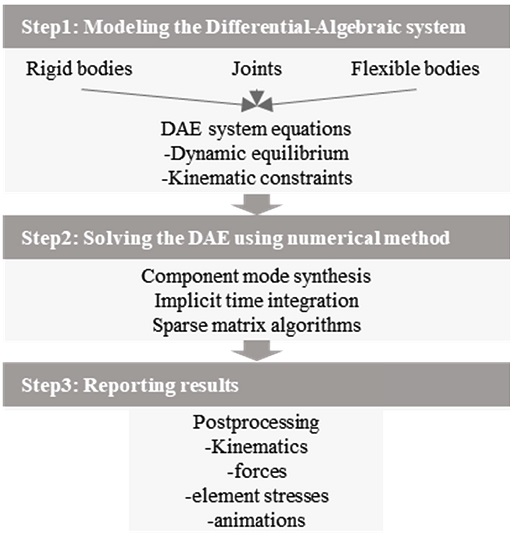
일반적으로 다물체 동역학 해석은
Fig. 4와 같이 크게 3단계로 수행된다. 우선, 유연체(Flexible Bodies), 강체(Rigid Bodies), 조인트(Joints)를 구성하여 다물체 동역학 모델을 모델링한다. 다물체 동역학 모델의 지배방정식은
식(1)로 표현된다(Géradin and Cardona
17).
Fig. 4General methodology description for multibody systems
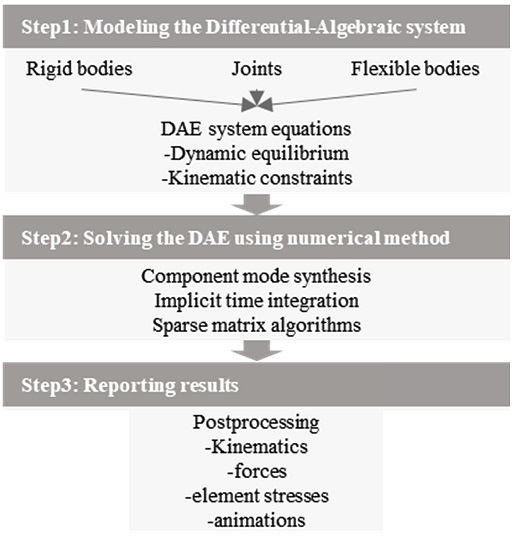
여기서, M, g, ϕ, B = ∂ϕ/∂ϕ는 각각 질량행렬, 하중벡터, 비선형 호로노믹(Holonomic) 제약 조건 벡터, 제약 조건 구배를 의미한다. 다음으로, 미분대수방정식(Differential-Algebraic System, DAE)
식(1)을 수치해석기법으로 계산한다.
2.2.2 다물체 동역학 해석 모델
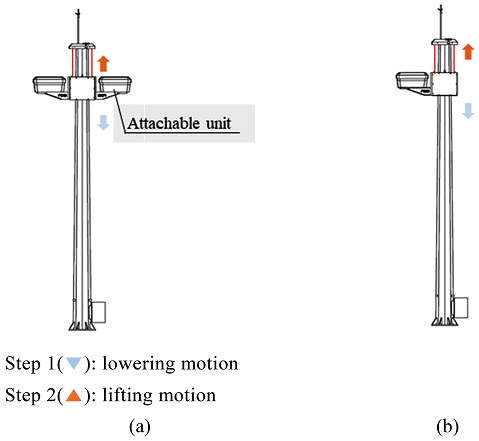
승하강식 드론 스테이션의 탈부착 유닛은
Fig. 5와 같이 목적에 따라서 장착되거나 탈착될 수 있다. 탈부착 유닛이 장착될 경우(
Fig. 5(a)), 상부 무선 충전소와 탈부착 유닛의 자중은 승하강 링크 어셈블리에 부착된 4개의 케이블을 통과하여 구조물 최하부에 설치된 권양기(Winch)로 전달되며 구조물의 비틀림과 영구변형의 원인으로 작용할 수 있다. 탈부착 유닛이 탈착될 경우(
Fig. 5(b)), 무선 충전소와 무게 차이에 비례하여 구조물의 자중이 폴 기둥의 도심을 벗어나게 되어 내부 편심 모멘트와 응력이 추가로 발생할 것이다. 따라서 설계자는 승하강식 드론 스테이션을 시공하기 전 설계 단계에서 구조물이 구동하는 동안 강도가 충분한지 정량적으로 평가하여야 한다. 본 연구에서는
Fig. 5와 같이 승하강식 드론 스테이션의 작동 여부와 강도를 검토하기 위하여 탈부착 유닛이 부착된 경우와 탈착된 경우를 각각 모델링하고, 권양기의 작동으로 구조물이 2 m 하강(Step 1)한 뒤 다시 2 m 상승(Step 2)하도록 해석 시나리오를 구성하였다. 승하강 링크 어셈블리의 구속 관계는
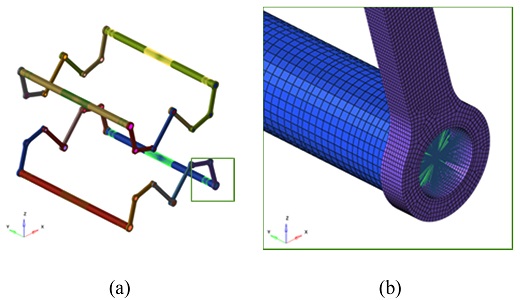
Fig. 6과 같이 총 24개의 강체 바퀴와 총 20개의 유연체 링크가 회전 조인트로 연결되어 서로 지지된 형태이다. 회전하는 링크에 연결된 강체 바퀴는 링크 어셈블리와 유연체 케이블을 묶는 용도로 모델링하였고, 폴과 롤러 지지바에 설치된 강체 바퀴는 폴과 함께 접촉 조건을 부여하여 바퀴가 폴 위를 접촉하여 굴러갈 수 있도록 모델링하였다. 승하강기 내부 링크가 운동하면서 발생하는 휘어짐, 비틀림, 변형을 분석하기 위하여
Fig. 7(a)와 같이 강도에 대한 검토가 필요한 유연체 링크를 따로 선별하여 유한요소 모델링하였다.
Fig. 7(b)와 같이 유연체 링크와 강체 링크 사이 구속 관계를 부여하기 위해 체결부를 다중점 구속 조건(MPC)로 모델링하였다.
Fig. 5Scenarios for the multibody dynamics analysis; (a) With attachable unit, and (b) Without attachable unit

Fig. 6Linkage of the lifting-and-lowering mechanism for the multibody dynamics analysis

Fig. 7Flexible body model of the lifting-and-lowering machine; (a) Finite element models, and (b) MPC (Multi-Point constraint)
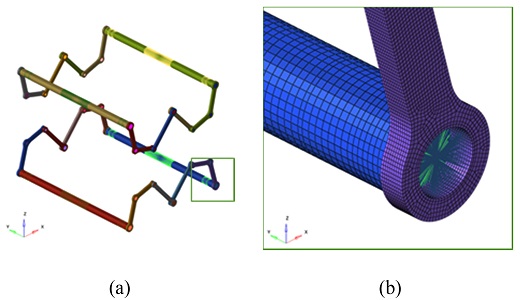
Fig. 8과 같이 총 4개의 유연체 케이블은 링크 어셈블리를 시작점으로 연결되어서 X자 매듭 형태로 조여지는 부분에 강체 바퀴를 부착하여 폴과 신속하게 조임이 발생할 수 있도록 모델링하였다.
Fig. 8Diagram of simple cable-pulley system for the multibody dynamics analysis
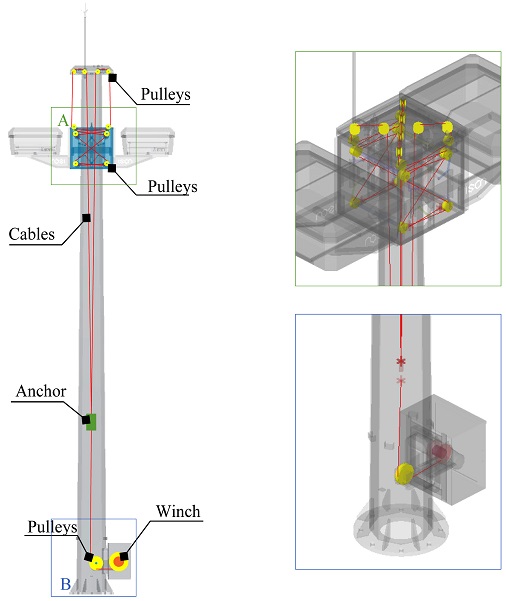
앵커는 4개의 케이블을 하나의 케이블로 합쳐서 권양기의 토크를 4개 유연체 케이블에 안정적이고 균등하게 전달하는 역할을 한다. 해석 시나리오를 구현하기 위하여
Table 2와 같이 권양기는 반경 89.7 mm, 하강 시 20 s 동안 3바퀴, 승강시 20 s 동안 3바퀴 총 6바퀴를 회전하도록 조건을 입력하였다.
Table 2Input of the winch model
Table 2
|
Label |
Value |
Unit |
|
Wrapped radius |
89.7 |
mm |
|
Amplitude |
3 |
rev |
|
Date forward |
2 |
s |
|
Date reverser |
22.00 |
s |
|
Data delay |
20 |
s |
3. 다물체 동역학 해석 결과
3.1 승하강 메커니즘 모션 안정성 평가
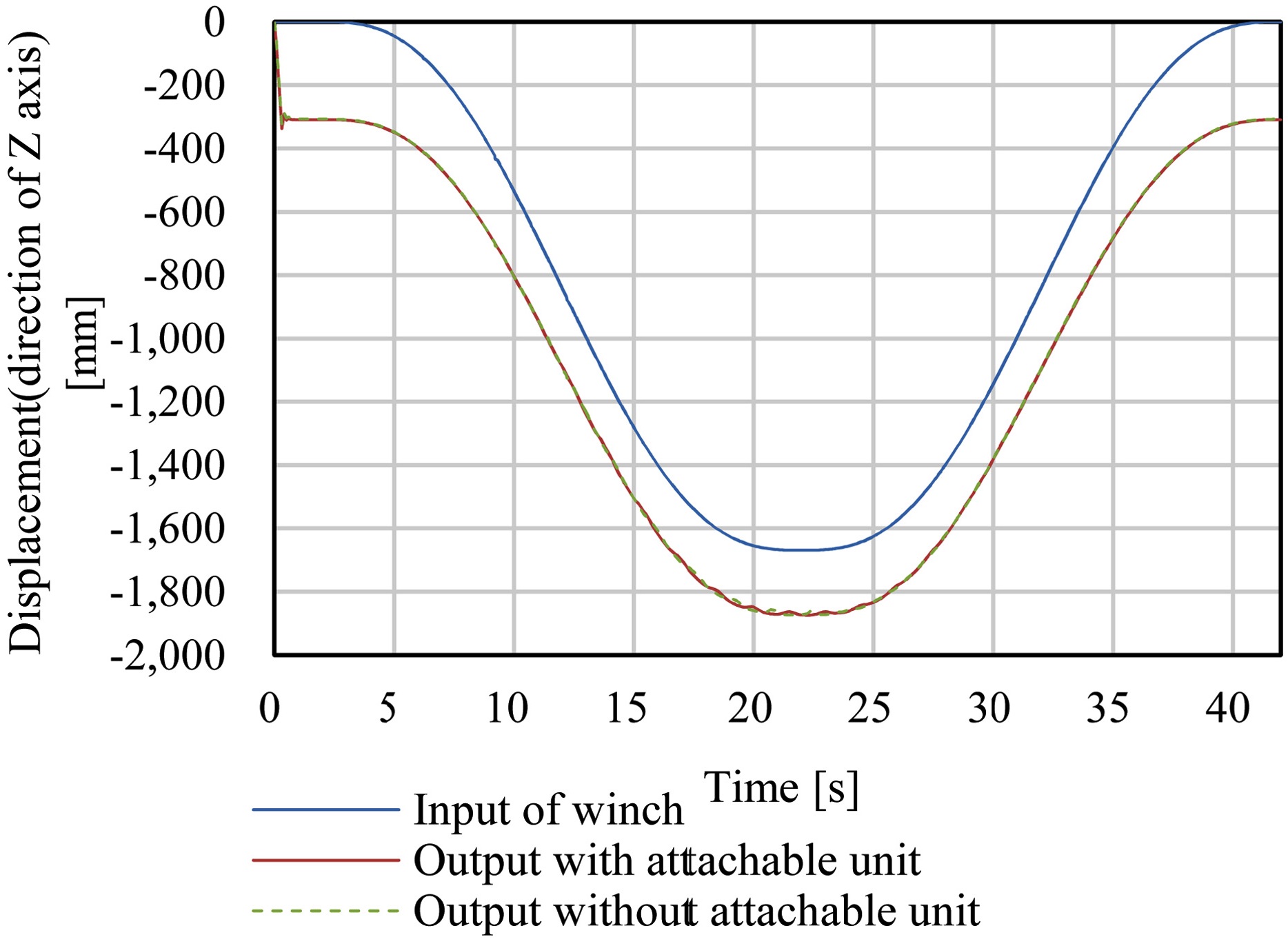
Fig. 9는 권양기의 회전에 따른 케이블 길이 변화를 시스템의 입력으로 승하강 장치의 높이 변화를 출력으로 설정하여 시간에 따른 해석 결과를 나타낸 그래프이다. 해석 결과에 따르면 두 가지 설계안 모두 동일하게 해석 시나리오 초기 0.3 s일 때 승하강 장치는 권양기의 작동과 무관하게 약 300 mm 아래로 하강하였고, 이후 안정적으로 승하강 장치의 높이(출력)는 권양기에 의한 케이블 변화(입력)를 추종하며 안정적으로 변화하였다.
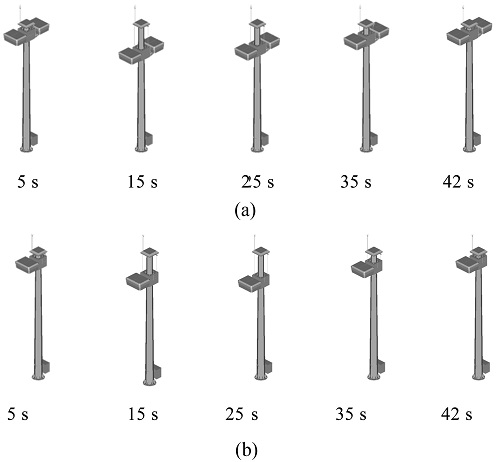
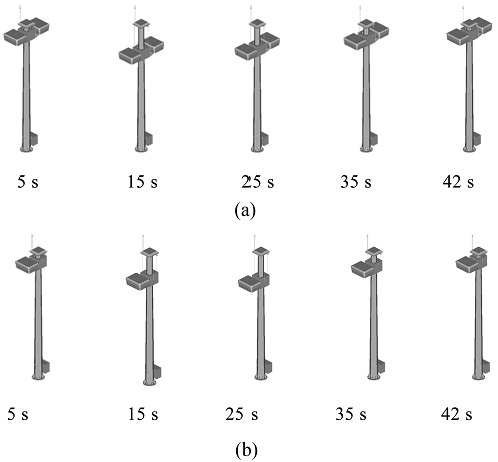
Fig. 10과 같이 일정 시간 간격으로 계산 형상을 나열한 결과 두 가지 설계안 모두 동일하게 해석 시나리오 초기 0.3 s일 때 자중으로 인하여 유연체 케이블이 인장되면서 구조물이 약 300 mm 아래로 이동하였지만 이후 입력값을 안정적으로 추종한다는 사실을 확인하였다. 실제 구조물을 제작할 때 승하강 장치는 지면에서 조립되어 케이블로 서서히 들어 올리기 때문에 승하강기 자중으로 인하여 케이블이 갑자기 인장되는 현상은 무시 가능하다.
Fig. 9The displacement time history of the multibody dynamics analysis result
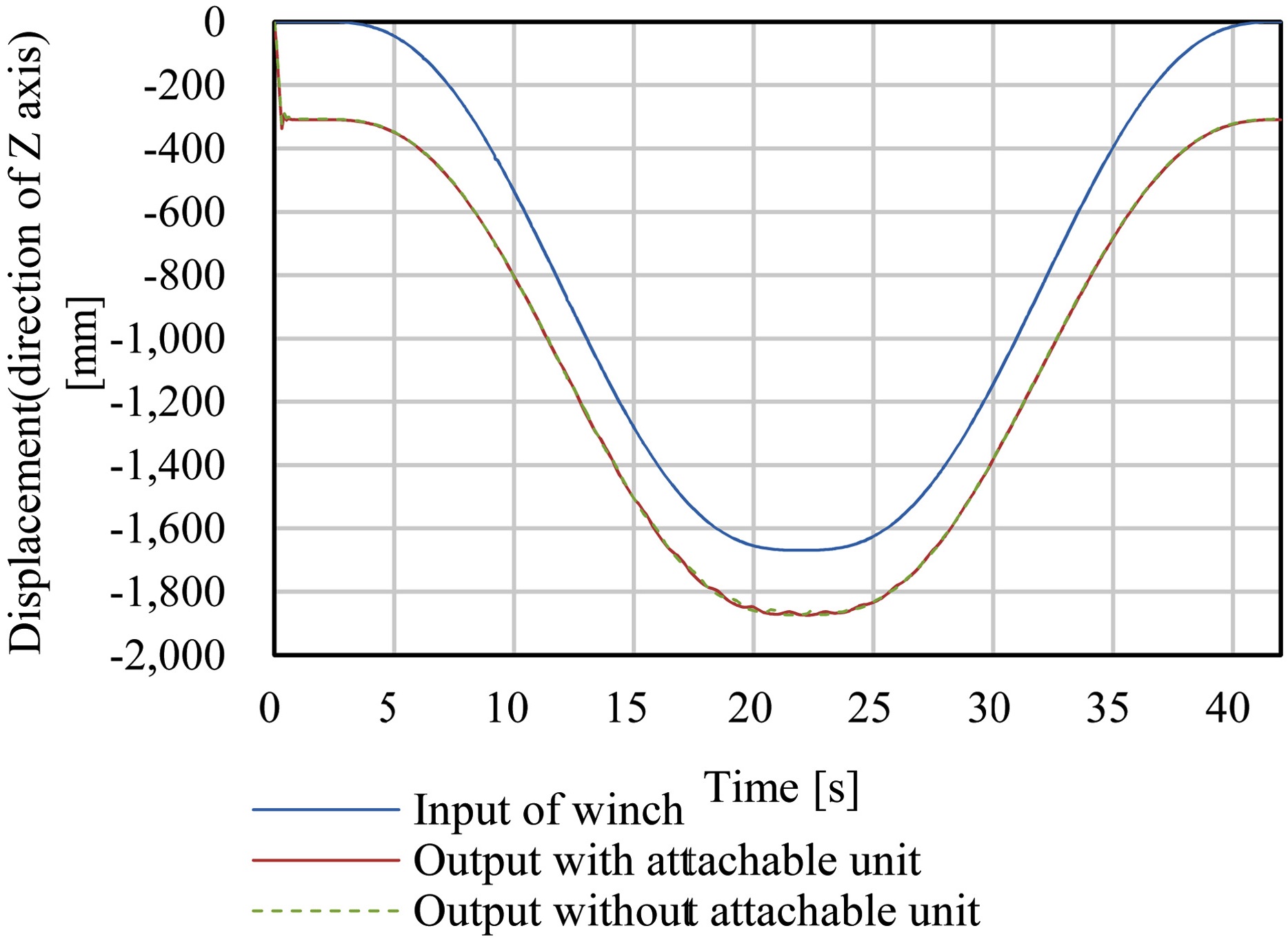
Fig. 10The sequence of the multibody dynamics analysis results; (a) With attachable unit, and (b) Without attachable unit
3.2 승하강 메커니즘 강도 평가
승하강기의 링크 어셈블리는 케이블이 X자 매듭 형태로 배치되어 폴과 함께 조여지도록 설계되었기 때문에 강도에 가장 취약한 구조물이다. 따라서 구조물을 시공하기 전 설계 단계에서 강도를 신중히 검토하여야 한다.
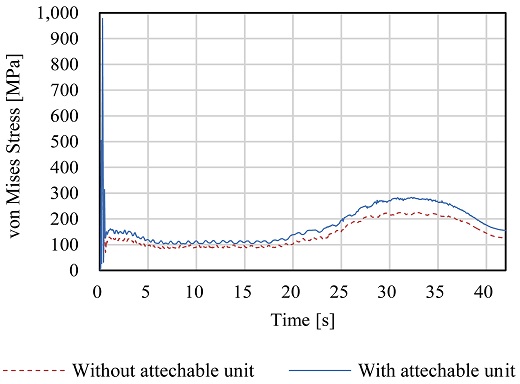
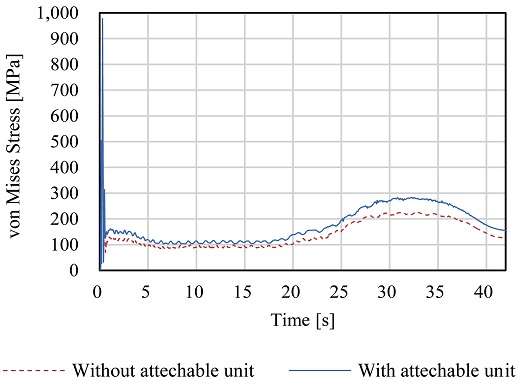
Fig. 11은 두 가지 해석 시나리오의 시간에 따른 등가응력 이력 결과를 나타낸다. 해석 시나리오 0.3 s일때 두 가지 해석 결과 모두 항복응력을 일시적으로 초과했지만 곧바로 최대응력은 항복응력 미만으로 감소하였다.
Fig. 11The von Mises stress time history of the multibody dynamics analysis result
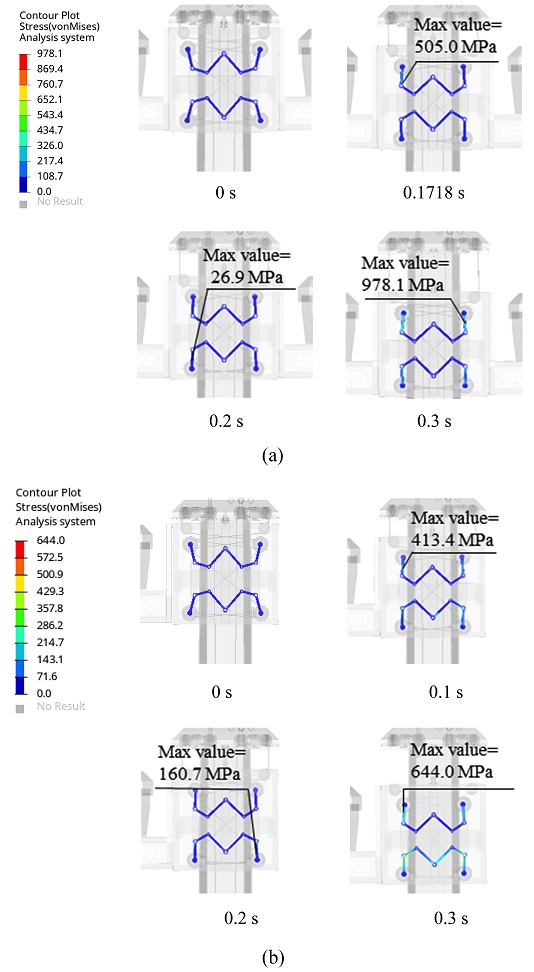
해석 시나리오 0.3 s일 때 등가응력 결과가 재료의 항복응력 이상으로 증가하는 원인을 분석하기 위하여
Fig. 12와 같이 일정 시간 간격으로 결과 그림을 나열하고 분석하였다. 일시적으로 항복응력을 초과하는 원인은 두 가지 해석 시나리오에서 동일하게 승하강기가 자중으로 인하여 아래로 빠르게 이동하면서 X자 매듭 형태 배치된 케이블로 폴과 함께 조여졌고, 그로 인하여 링크 어셈블리의 롤러 지지바가 빠르게 폴과 접촉하며 발생한 충격 때문인 것으로 판단되었다. 하지만 실제 구조물을 제작할 때 승하강 장치를 지면에서 조립한 뒤 케이블로 서서히 들어 올리기 때문에 롤러 지지바가 구조물 자중으로 인하여 급격한 폴과 충돌하는 현상은 무시 가능하다.
Fig. 12The stress distribution of the multibody dynamics analysis results; (a) With attachable unit, and (b) Without attachable unit (Unit: Mpa)
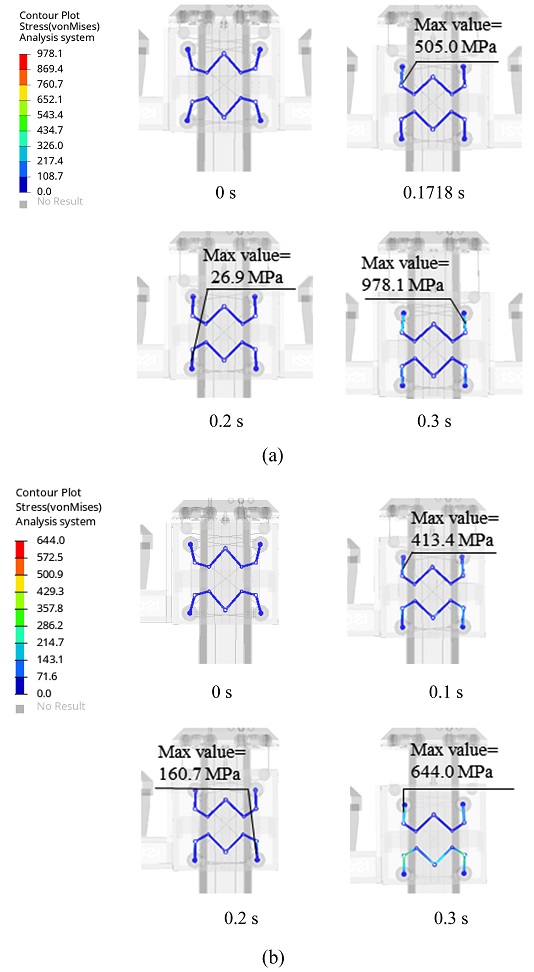
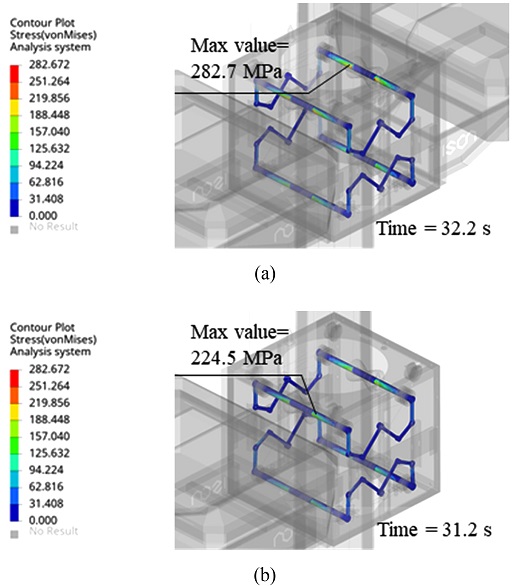
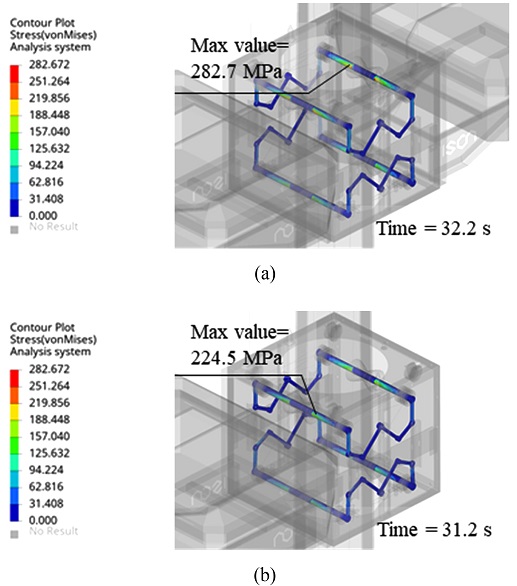
Fig. 13은 해석 시나리오 중 발생한 승하강기의 최대응력 위치를 나타내는 결과 그림이다. 탈부착 유닛을 장착할 경우 시간 32.2 s일 때, 최대응력은 282.7 MPa이 계산되었다. 탈부착 유닛이 없을 경우 시간 31.2 s일 때, 최대응력은 224.5 MPa이 계산되었다. 두 가지 해석 시나리오에서 동일하게 최대응력은 롤러 지지바의 중심부에서 발생하였다. 안전계수는 S45C의 항복응력(490 MPa)을 기준으로 계산하여 탈부착 유닛이 있을 때 1.73, 없을 때 2.18로 계산되었다.
Fig. 13The stress distribution of the multibody dynamics analysis results; (a) With attachable unit, and (b) Without attachable unit (Unit: MPa)
롤러 지지바의 재료 S45C는 강하고, 가격이 저렴한 편이라 널리 사용되고 있다. 그리고 롤러 지지바가 변형 또는 파손될 경우 장치를 승하강하는 동안 소리와 육안으로 정비 필요성을 쉽게 판단할 수 있다. 설계 문헌에 따르면 재료에 대한 물성 데이터가 풍부하고 유지보수가 잘 이뤄질 경우 1.2-1.5 수준의 안전계수를 적용할 수 있다.
18
3.3.1 전동 권양기 토크에 대한 검증
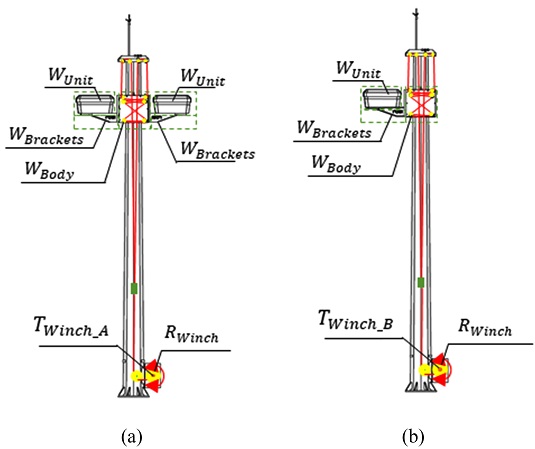
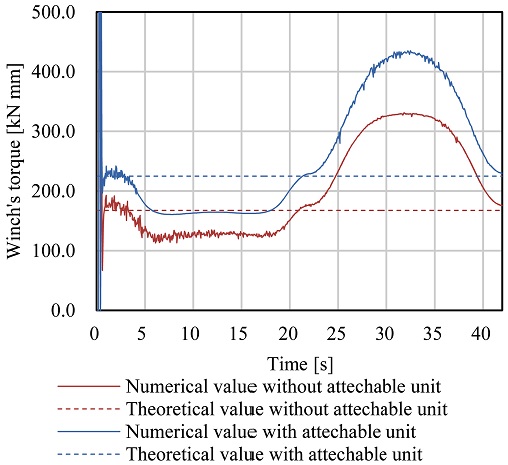
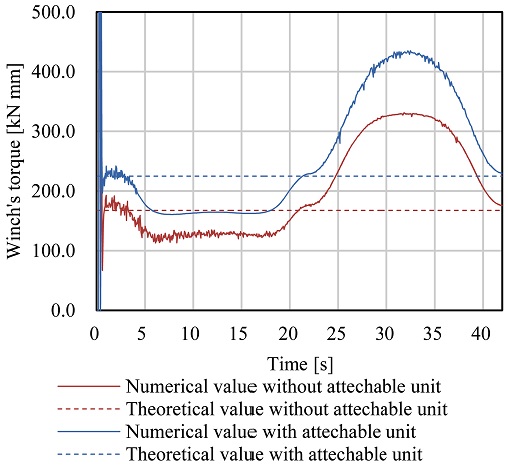
계산 검증은 권양기에서 발생한 토크의 이론값과 수치적 결과값을 비교하는 방법으로 수행하였다. 다물체 동역학 수치해석 모델이 정상적으로 모델링 되었다면 권양기가 드론 스테이션 상부에 위치한 중량물을 올리고 내리는 동안 발생한 토크의 수치적 결과값과 이론적 토크값이 일치해야 한다. 이론적 토크값은
Fig. 14와 같이 승하강식 드론 스테이션의 자중값으로 계산할 수 있다. 승하강 장치에 무선 충전소와 탈부착 유닛이 장착된 설계안의 경우 토크는
식(2)와 같이 225, 탈부착 유닛이 탈착된 설계안은
식(3)과 같이 167.6 kN·mm로 계산되었다.
Fig. 14Results of the stress distribution of the lifting-and-lowering type drone station; (a) With attachable unit, and (b) Without attachable unit
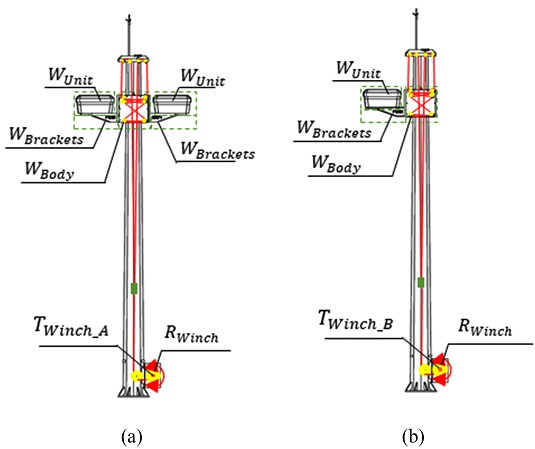
Fig. 15는 권양기가 승하강 장치를 내리고 올리는 동안 권양기에서 발생한 토크 이력을 나타낸 그래프이다. 초기 해석 시나리오 0.3 s일 때 두 가지 해석 시나리오 모두 동일하게 승하강 장치가 낙하하는 동안 권양기에 큰 충격이 부여되어 이론적 토크값과 수치적 결과값의 차이가 크게 나타났다. 해석 시나리오 0.3 s 이후 두 가지 결과 모두 충격 에너지가 소산되면서 이론적 토크값과 수치적 결과값의 차이는 상대오차 1% 수준으로 수렴하였다. 해석 시나리오 0.5 s 이후 권양기가 상부 승하강 장치를 아래로 운반하면서 발생한 중력과 동일한 방향의 가속도로 인하여 이론적 토크값보다 수치적 결과값이 최대 20% 정도 감소하는 것을 확인하였다. 해석 시나리오 20 s 이후 권양기가 상부 승하강 장치를 올리는 과정에서 중력 가속도와 반대 방향의 가속도가 형성되었고, 수치적 결과값이 이론적 토크값보다 최대 90% 정도 높게 계산되었다. 해석 시나리오 38 s 이후 상부 승하강 장치가 이동을 멈추면서 수치적 결과값과 이론적 토크값의 차이는 상대오차 기준 1% 수준으로 수렴하였다.
Fig. 15Results of comparison between the numerical torque-time curve and theoretical torque-time curve
3.3.2 승하강식 드론스테이션 실증 시험
다물체 동역학 해석을 통해 승하강식 드론 스테이션의 동적 안정성과 강도를 정량적으로 검토 후
Fig. 16과 같이 장치를 제작하고, 실증 시험을 수행하였다. 그 실증 시험 해석 결과와 동일하게 중량물을 수직 방향으로 올리고 내리며 안정적으로 동작하는 것을 확인하였다.
Fig. 16Photo of the lifting-and-lowering-type drone station

4. 결론
본 연구를 통하여 다물체 동역학 해석 모델을 이용하여 승하강식 드론 스테이션의 동적 안정성과 강도를 검토하였다. 그리고 권양기에서 발생한 토크의 이론값과 수치적 결과값을 비교하여 계산 모델의 타당성을 검증하였다.
(1) 동적 거동 안정성을 분석한 결과에 따르면 초기 0.3 s일 때 자중으로 인하여 유연체 케이블이 인장되면서 구조물이 약 300 mm 아래로 이동하지만 시간이 흐르면서 출력값은 입력값을 안정적으로 추종하였다.
(2) 강도 평가 결과에 탈부착 유닛이 장착 및 미장착되었을 경우 최대응력은 각각 282.7 MPa(32.2 s)와 224.5 MPa(31.2 s)로 계산되었다. 두 가지 경우 모두 재료(S45C)의 항복응력(490 MPa)을 초과하지 않았다.
(3) 계산 검증을 위하여 권양기에서 발생한 토크의 이론값과 수치적 결과값을 비교한 결과에 따르면 권양기에서 계산된 토크값과 이론적 토크값의 차이는 상대오차 기준 1% 수준으로 계산되었다.
본 연구에서 구현한 다물체 동역학 모델은 향후 구조물의 유지보수, 경량설계 등 다양한 목적으로 활용이 가능할 것으로 기대된다.
ACKNOWLEDGMENTS
본 연구는 중소벤어기업부가 지원하는 ‘지역주력산업육성 사업’의 지원으로 개발한 결과물입니다(No. S2912582).
REFERENCES
- 1.
Colomina, I. and Molina, P., “Unmanned Aerial Systems for Photogrammetry and Remote Sensing: A Review,” ISPRS Journal of Photogrammetry and Remote Sensing, Vol. 92, pp. 79-97, 2014.
10.1016/j.isprsjprs.2014.02.013
- 2.
Alsamhi, S. H., Ma, O., Ansari, M. S., and Almalki, F. A., “Survey on Collaborative Smart Drones and Internet of Things for Improving Smartness of Smart Cities,” IEEE Access, Vol. 7, pp. 128125-128152, 2019.
10.1109/ACCESS.2019.2934998
- 3.
Boukoberine, M. N., Zhou, Z., and Benbouzid, M., “Power Supply Architectures for Drones-A Review,” Proc. of the 45th Annual Conference of the IEEE Industrial Electronics Society, pp. 5826-5831, 2019.
10.1109/IECON.2019.8927702
- 4.
Gong, A. and Verstraete, D., “Fuel Cell Propulsion in Small Fixed-Wing Unmanned Aerial Vehicles: Current Status and Research Needs,” International Journal of Hydrogen Energy, Vol. 42, No. 33, pp. 21311-21333, 2017.
10.1016/j.ijhydene.2017.06.148
- 5.
GiantDrone Co., Ltd., “The Hydrogen Fuel Cell Drone Equipped with the Hybrid Controller,” KR Patent, 1019042250000, 2018.
- 6.
Jaeger, M. and Adair, D., “Conceptual Design of a High-Endurance Hybrid Electric Unmanned Aerial Vehicle,” Materials Today: Proceedings, Vol. 4, No. 3, pp. 4458-4468, 2017.
10.1016/j.matpr.2017.04.018
- 7.
Desai, P., Faivre, S. M., and Zerillo, P. J., “Tethered Drone Assembly," US Patent, 20160318607A1, 2016.
- 8.
Whitaker, T. M. and Corson, M., “Tethered Unmanned Aerial Vehicle Fire Fighting System,” US Patent, 20170043872A1, 2015.
- 9.
Choi, C. H., Jang, H. J., Lim, S. G., Lim, H. C., Cho, S. H., et al., “Automatic Wireless Drone Charging Station Creating Essential Environment for Continuous Drone Operation,” Proc. of the International Conference on Control, Automation and Information Sciences, pp. 132-136, 2016.
10.1109/ICCAIS.2016.7822448
- 10.
Beckman, B. C. and Bjone, N., “Ground-based mobile maintenance facilities for unmanned aerial vehicles,” US Patent, 9718564B1, 2017.
- 11.
Gentry, N. K., Hsieh, R., and Nguyen, L. K., “Multi-Use Unmanned Aerial Vehicle Docking Station,” US Patent, 9527605B1, 2014.
- 12.
Han, K. and Jung, H., “Trends in Logistics Delivery Services Using UAV,” Electronics and Telecommunications Trends, Vol. 35, No. 1, pp. 71-79, 2020.
- 13.
- 14.
Kim, C. and Baek, Y., “Dynamic Analysis of a Flexible Body in Multibody System Using DADS and MSC/NASTRAN,” Journal of the Korean Society for Precision Engineering, Vol. 18, No. 2, pp. 63-71, 2001.
- 15.
Han, J. B., Yang, K. M., Sin, H. S., Lee, J. I., Lee., S. J., et al., “Simulation based on the Multibody Dynamics for Verification of Autonomous Driving Control of Agricultural Robot,” Journal of Institute of Control, Robotics and Systems, Vol. 25, No. 10, pp. 902-909, 2019.
10.5302/J.ICROS.2019.19.0064
- 16.
Jeong, W. H., Shin, S. K., and Seo, J. K., “Dynamic Analysis of High Precision Stage Using Flexible Multibody Dynamics Model,” Proc. of the Korean Society of Precision Engineering Conference, pp. 379-379, 2014.
- 17.
Géradin, M. and Cardona, A., “Flexible Multibody Dynamics: A Finite Element Approach,” John Wiley & Sons, pp. 134-150, 2001.
- 18.
Maleque, M. A. and Salit, M. S., “Materials Selection and Design,” Springer, 2013.
10.1007/978-981-4560-38-2
Biography
- Sang Ho Kim
Researcher of Integrated Robotic Systems Research Center, Korea Institute of Robotics and Technology Convergence. His research interest is industrial robotic system.
- Jae Youl Lee
Center Director Researcher of Integrated Robotic Systems Research Center, Korea Institute of Robotics and Technology Convergence. His research interest is pipe robotics, professional service robot, system integration.
- Sung-Ho Hong
Senior Researcher of Integrated Robotic Systems Research Center, Korea Institute of Robotics and Technology Convergence. His research interest is embedded control system, and multi-robot system.
- Jehun Hahm
Senior Researcher of Integrated Robotic Systems Research Center, Korea Institute of Robotics and Technology Convergence. His research interest is intelligent control, and autonomous driving robot.
- Kap-Ho Seo
Director of Interactive Robotics R&D Division, Korea Institute of Robotics and Technology Convergence. His research interest is intelligent control, and embedded control system, image processing technique.
- Jin-Ho Suh
Professor in the Department of Mechanical System Engineering, Pukyong National University. His research interest is disaster response robot, underwater robots, and system control & integration.
- Young Sik Joung
Junior Managing Director of Electrical and Electronic Design Department, ISON Co., Ltd.. His research interest is embedded control system, and image processing technique.

 , Sung-Ho Hong1, Jehun Hahm1, Kap-Ho Seo1, Jin-Ho Suh2, Young Sik Joung3
, Sung-Ho Hong1, Jehun Hahm1, Kap-Ho Seo1, Jin-Ho Suh2, Young Sik Joung3