ABSTRACT
This paper proposes a simplified path-following control method for an Unmanned Surface Vessel (USV) considering towed Unmanned Underwater Vehicles (UUV). For dealing with an effective USV dynamic model, 1st order of the linear system with time delay and gain value are applied rather than applying a non-linear dynamic model, and it is identified with real vessel data from several straight and turning experiments. Then, USV attitude and velocity are controlled by multi-loop Proportional-Derivative (PD) and proportional controller. A USV guidance scheme is derived through a UUV guidance scheme to support autonomous navigation for towed UUV, and combination of cross track and Line of Sight (LOS) guidance is presented for adaptive path following. Finally, to validate the performance of the proposed USV path-following control method with respect to the towed UUV guidance scheme, the results of simulations are presented.
-
KEYWORDS: Unmanned surface vessel, Unmanned underwater vehicle, Dynamic model, Attitude control, Velocity control, Path-following control
-
KEYWORDS: 무인수상정, 무인수중정, 동적 모델, 자세 제어, 속도 제어, 경로 추종 제어
NOMENCLATURE
USV Position in the Inertia Frame W.R.T North, East Direction
USV Velocity in the Inertia Frame W.R.T North, East Direction
UUV Position in the Inertia Frame W.R.T North, East Direction
UUV Velocity in the Inertia Frame W.R.T North, East Direction
USV Velocity in the Body Frame W.R.T Surge, Sway Direction
UUV Velocity in the Body Frame W.R.T Surge, Sway Direction
Difference with ψUUV and ψUSV
Rotation Matrix (From Body Frame to Inertia Frame)
1. 서론
무인수상정 및 무인수중정과 같은 해양무인체계는 다양한 범위로 관심이 커지고 있다. 민수 분야에서는 해저 자원 탐사, 해저 지형 조사, 구조 및 재난 방제 등에 활용 가능하고, 국방 분야에서는 작전해역 및 주요 항만의 감시정찰, 대기뢰전, 대잠전, 대수상함전, 특수전 등에 활용 가능하다.
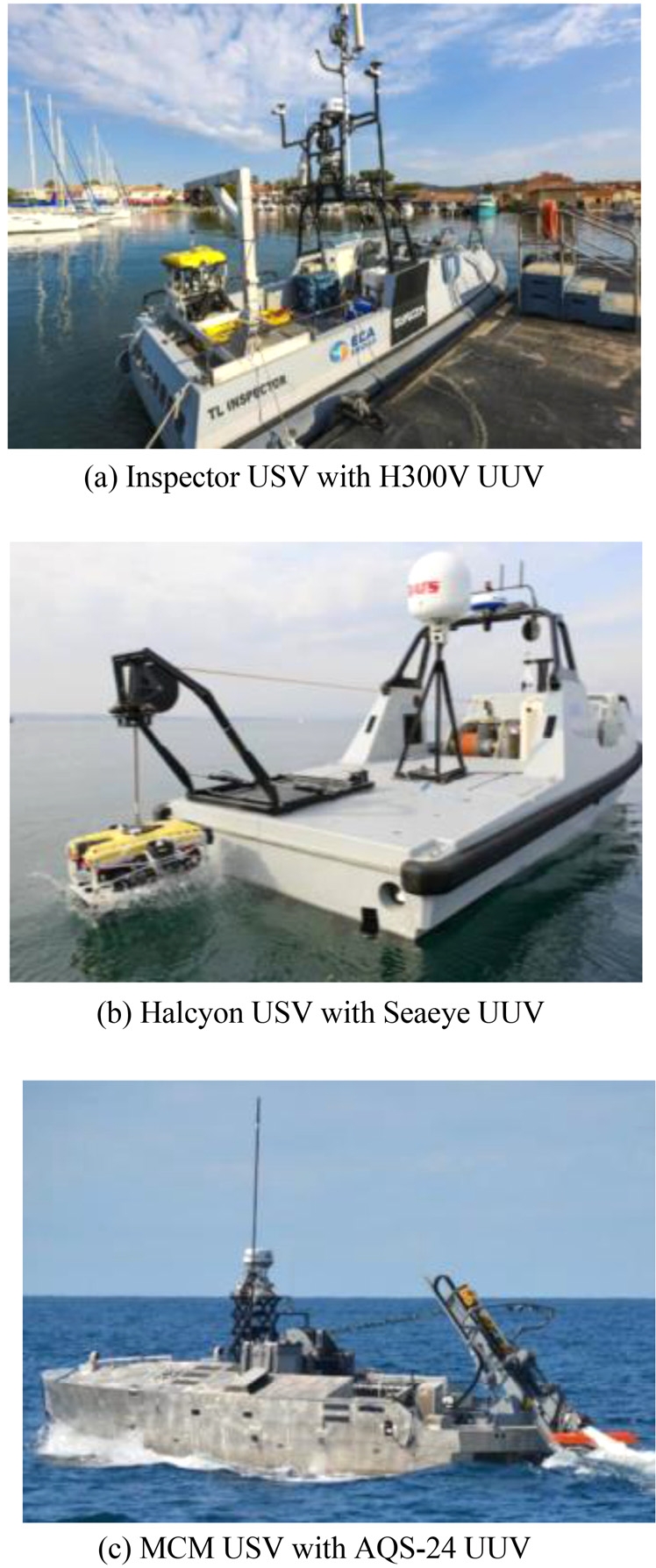
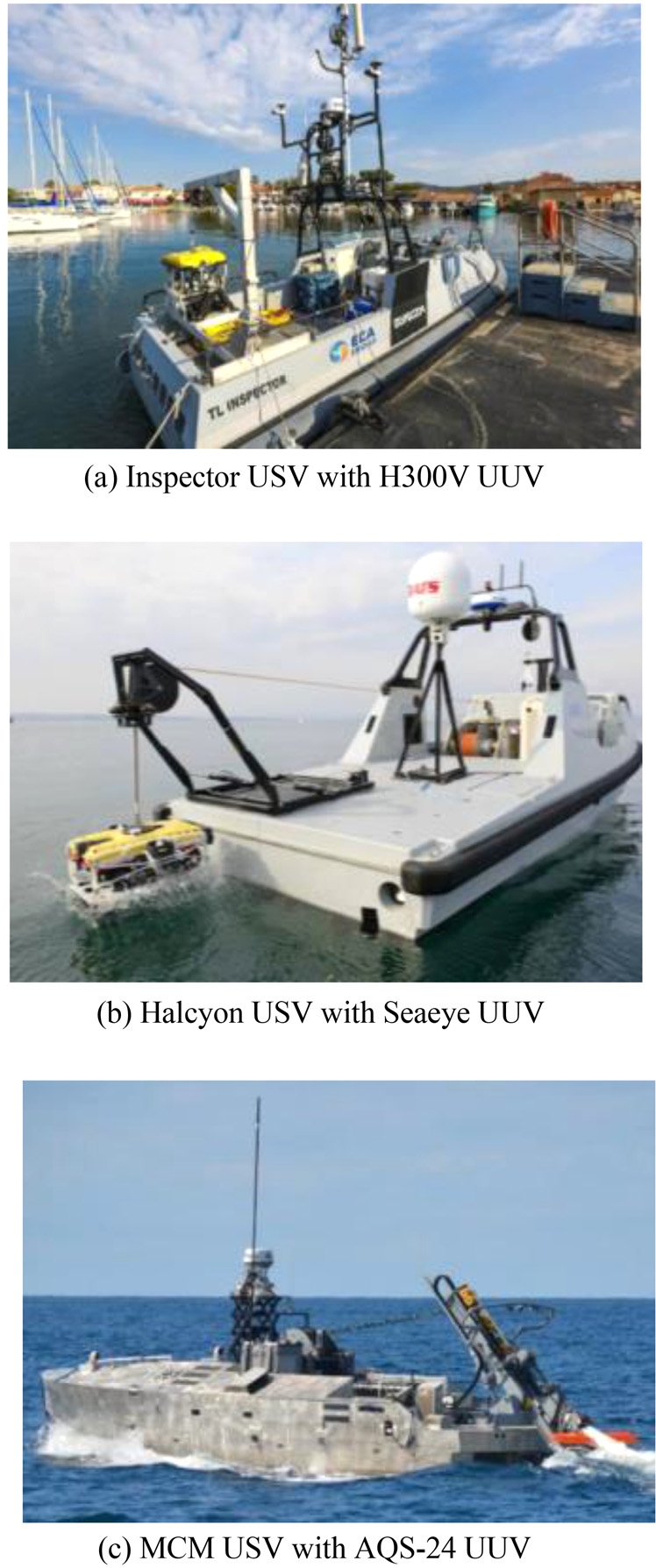
1-4 그동안은 무인수상정 및 무인수중정에 대하여 개별적으로 연구가 진행됐지만, 최근에는 무인수상정과 예인형 무인수중정을 함께 연동하는 해양무인복합체계 개발이 진행되고 있다.
Fig. 1과 같이 대표적으로 ECA Group사의 Inspector 및 H300V,
5 Thales사와 L3 ASV사의 Halcyon 및 SAAB사의 Seaeye,
6 그리고Northrop Grumman사의 MCM 및 AQS-24가 개발되었다.
7
Fig. 1 Development case of unmanned maritime integrated system
이러한 무인수상정과 예인형 무인수중정 결합시스템은 무인수중정 운용의 단점을 보완해준다. 운용 시나리오에 따라 무인수상정의 빠른 기동성과 경로점 자율 운항을 이용하여 무인수중정의 광역 탐색이 가능하고, 강조류 하에서도 무인수상정의 예인을 도움 받아 무인수중정의 정밀 탐색이 가능하다. 또한 예인케이블을 통해 무인수상정의 위치 정보를 받아 무인수중정의 위치 추정이 가능하여, 무인수상정은 무인수중정으로부터 상태 정보를 실시간으로 받을 수 있어 무인수상정의 대응 속도가 빠르다. 무인수상정 및 예인형 무인수중정의 임무수행을 효과적으로 적용하려면, 우선적으로 무인수상정 및 무인수중정의 경로 추종 제어 설계가 선행되야 한다. 하지만 무인수상정 및 무인수중정이 결합된 형태의 경로 추종 제어에 대한 연구는 많이 부족한 상태이다.
본 논문에서는 예인형 무인수중정이 무인수상정의 동력 도움을 받아 무인수중정의 탐색 범위를 넓힐 수 있도록 기본적이고 실질적인 무인수상정의 경로 추종제어 설계를 제안한다. 경로추종 제어 설계를 하기 위해서는 선제적으로 무인수상정 동적 모델 및 식별이 필요하다. 일반적으로 무인수상정 동적 모델은 유체력, 풍력, 파고 등 외란의 외력이 존재하기에 상당히 비선형적이다.
8 비선형적인 무인수상정 동적 모델로 제어기 설계하는 것은 단순한 작업이 아니므로, 선형적으로 단순화된 무인수상정 동적 모델들이 연구됐다.
9-14 단순화된 무인수상정 동적 모델 중 1차 시스템의 속도 모델11,12과 각속도 모델13,14을 선정하여, 직진 및 선회 실선시험을 통해 가속도 및 등속도 데이터와 각가속도 및 등각속도 데이터를 이용한 동적 모델 식별 방법을 제안하였고, 속도별 직진 및 선회 실선 시험을 확보하여 동적 모델을 속도에 따라 가변적으로 적응될 수 있게 설계하였다. 무인수상정 속도 및 자세 제어기는 계산량도 적고 효과적인 PID 제어로 선정하였으며, 무인수상정의 경로계획상의 수선거리별로 회전 반경을 다르게 하여 무인수상정 경로선을 동적으로 추정할 수 있도록 기존의 LOS 방법을 보완하였다. 최종적으로 예인형 무인수중정이 경로계획을 추종될 수 있도록 무인수상정 운동에 따른 예인형 무인수중정 운동 모델 관계를 역이용하여 예인형 무인수중정 경로계획을 기반한 무인수상정의 경로계획을 제안하였다.
논문의 구성은 다음과 같다. 2장에서는 무인수상정 및 예인형 무인수중정 운동 모델을 설명하고, 무인수상정 동적 모델 식별 방법을 제안한다. 3장에서는 무인수상정 제어와 예인형 무인수중정 경로계획 기반 무인수상정 경로계획을 제안한다. 4장에서는 성능 검증을 위해 시뮬레이션을 통해 분석한다. 마지막으로 5장에서 결론을 맺는다.
2. 무인수상정 및 예인형 무인수중정 시스템
2.1 무인수상정 및 예인형 무인수중정 운동 모델
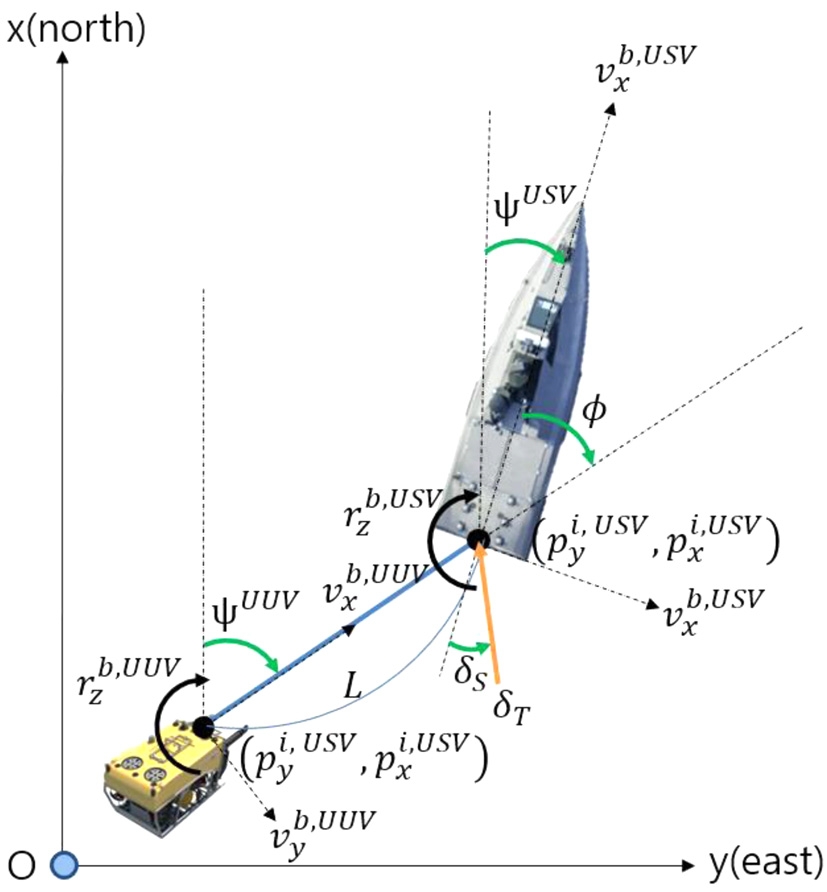
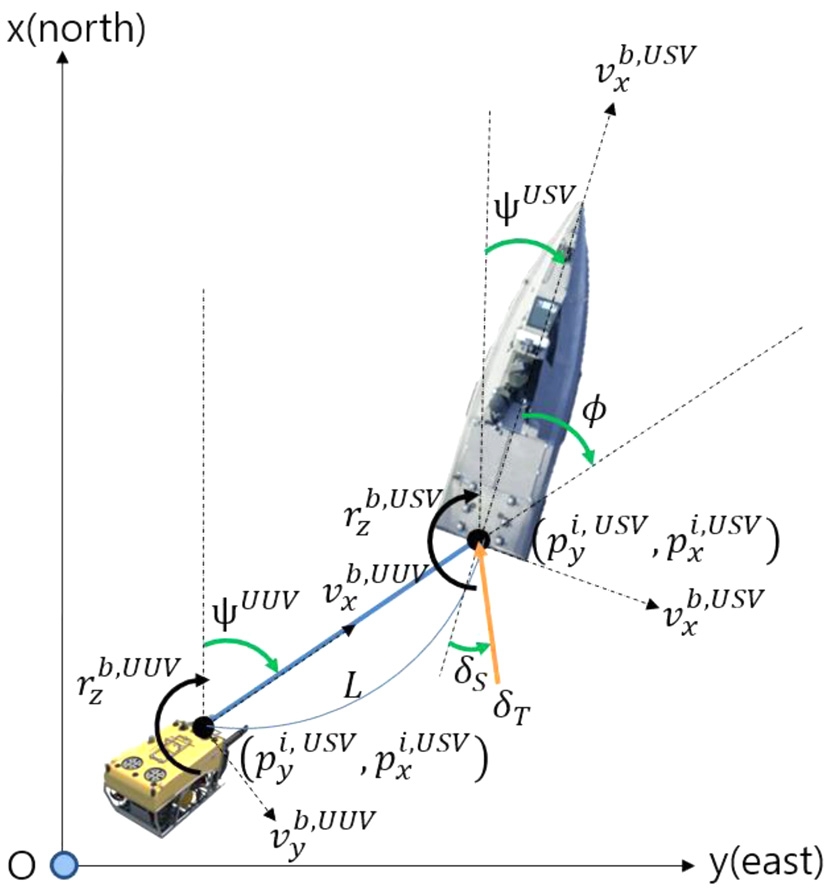
본 운동 모델은
Fig. 2와 같이 2차원 평면상 운동을 가정하여 무인수상정 및 예인형 무인수중정에 대한 운동모델은
식(1)과 같다.
Fig. 2Kinematics of USV and towed UUV
여기서 위치벡터(
η)는
pxi, pvi, ψT, 속도벡터(
v)는
vxb, vvb, rT이며, 회전행렬은
식(2)와 같다.
무인수상정과 예인형 무인수중정은 예인케이블 장력이 존재하고 케이블의 방향과 예인형 무인수중정의 자세가 같다는 가정하에 트렉터-트레일러 관계
15로 정의하였다. 무인수중정의 진행방향 속도(
vxb,UUV)는
식(3)과 같으며, 각속도(
rzb,UUV)는
식(4)와 같다. 여기서,
φ는
식(5)와 같이 무인수상정의 자세와 예인형 무인수중정 자세와의 차분값이다.
φ의 업데이트는
식(6)과 같으므로
식(4)를
식(6)에 대입하여
식(7)로
φ의 업데이트를 표현한다.
Nomoto 모델은
식(8)과 같이 입력 조타각에 대한 출력 헤딩 및 각속도 동적 모델설계에 가장 널리 사용되고 있다.
16,17 1차 선형 시스템 형태의 가장 간단한 동적 모델이므로 몇 가지 기동시험을 통해 게인
Kr와 시정수
Tr를 도출하여 입력 조타각(
δS)에 대한 출력 각속도(
r) 동적 모델 설계에 식별을 할 수 있다.
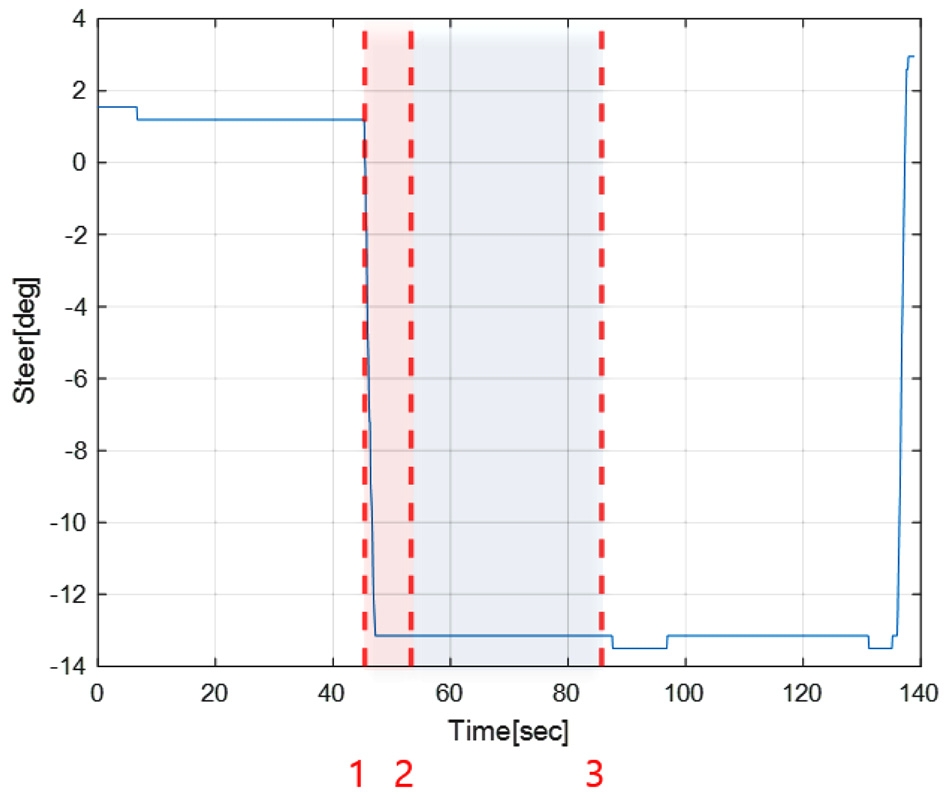
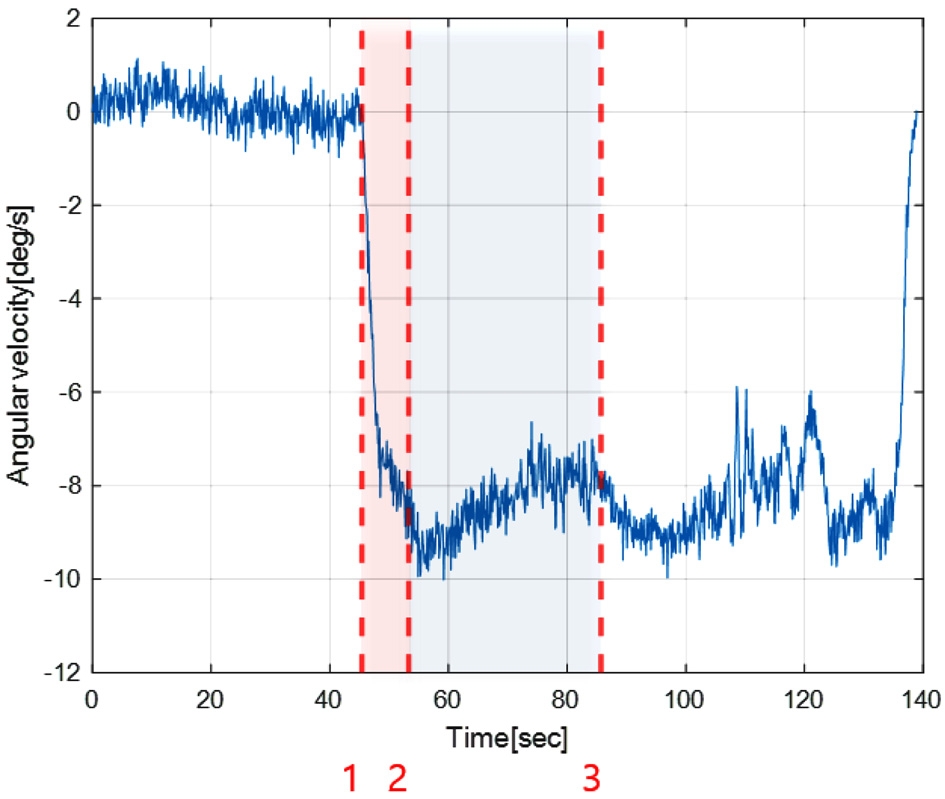
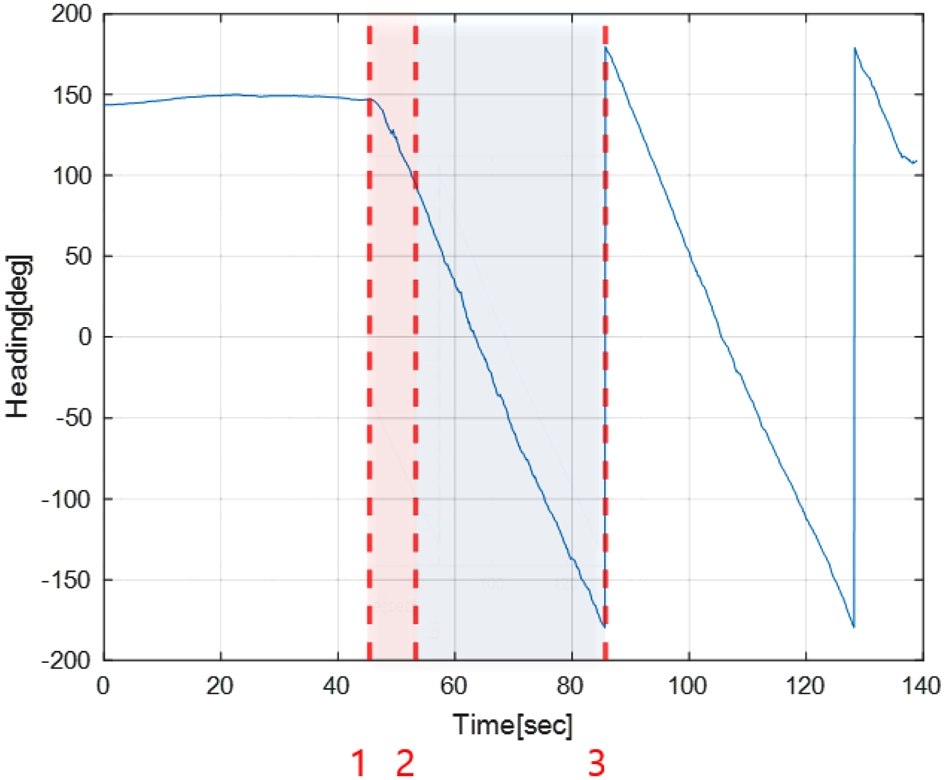
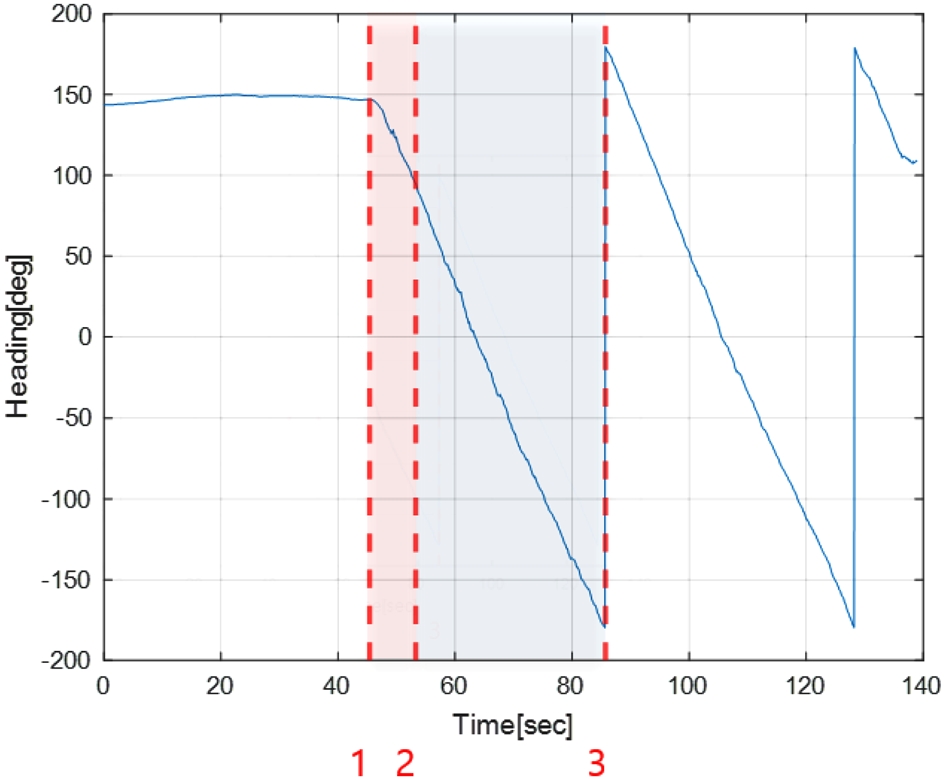
본 논문에서는
Figs. 3부터 5와 같이 빨간색 영역의 각가속도 선회 구간(1, 2)과 파란색 영역의 등각속도 선회 구간(2, 3)으로 구분하여 각속도(
r) 동적 모델에 대한 게인
Kr와 시정수
Tr를 도출한다. 우선,
식(9)와 같이
식(8)을 임의의 t 시간 동안 적분을 하면
식(10)으로 표현할 수 있다.
식(11)은
식(10)을 등각속도 구간(2, 3)에 대해 적용하였고,
r23은 0과 같으므로
식(11)은
식(12)로 정리하여 게인
K^r을 추정한다. 추정된 게인
Kr을 이용하여 각가속도 구간(1, 2)에 대하여
식(13)에 적용하고,
식(14)과 같이 시정수
T^r을 추정한다.
Fig. 3Steer input of USV curve maneuvering
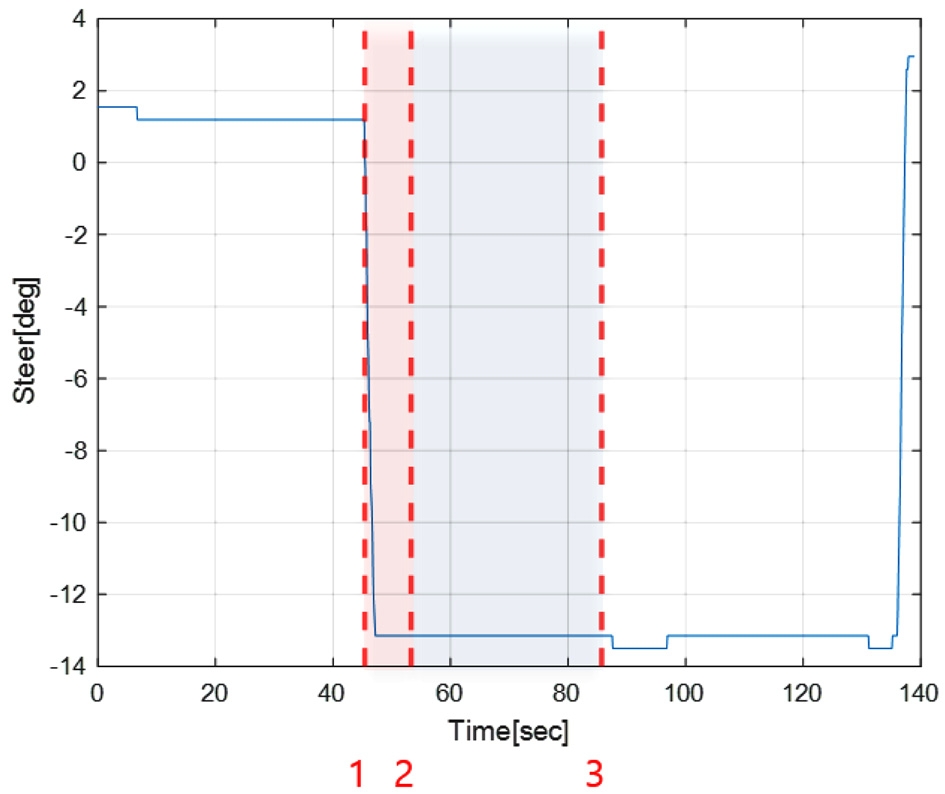
Fig. 4Angular velocity output of USV curve maneuvering
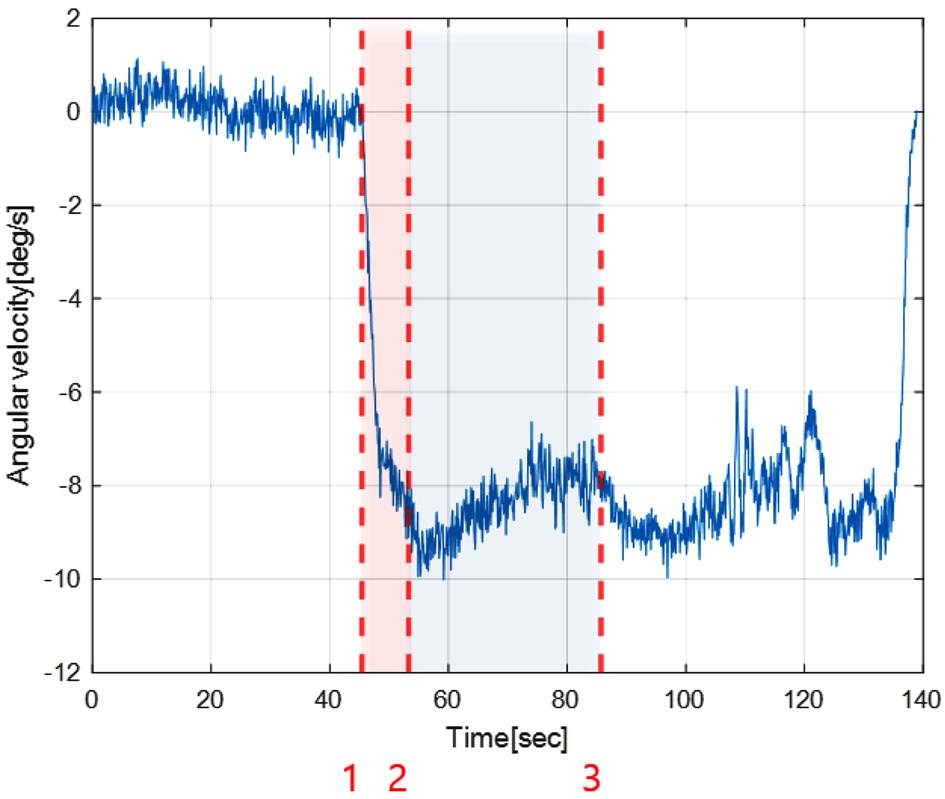
Fig. 5Heading output of USV curve maneuvering
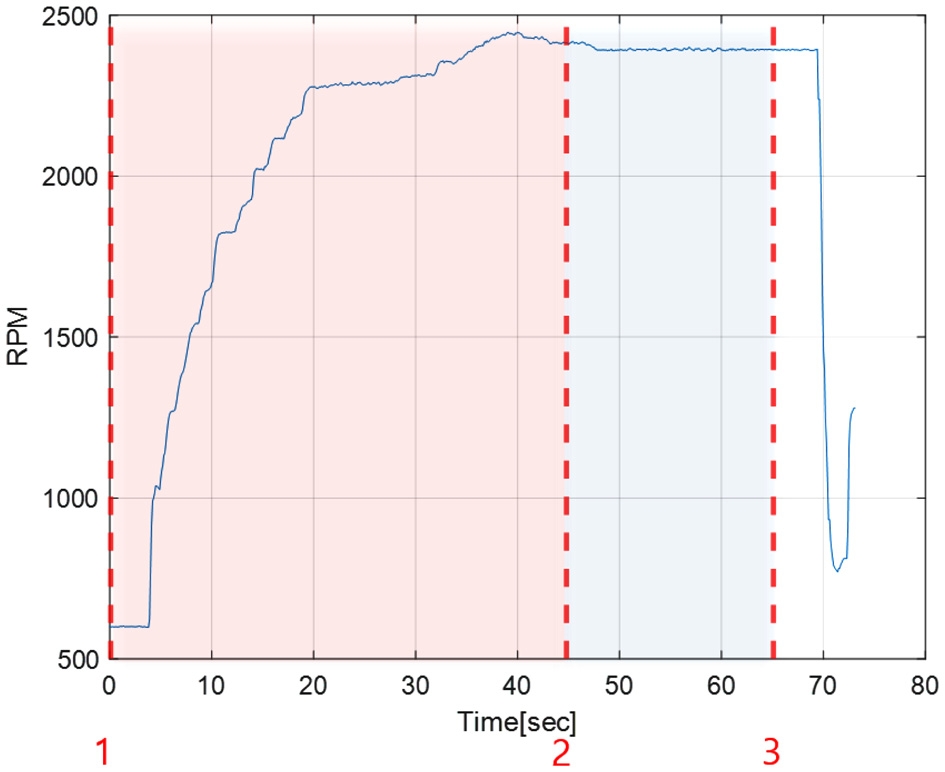
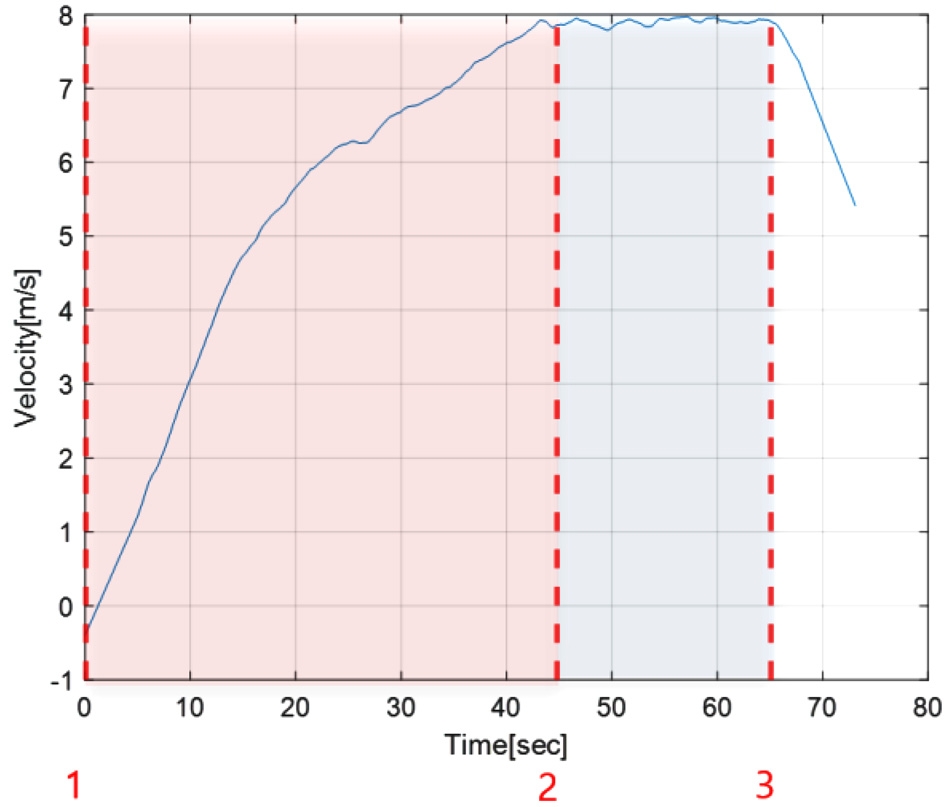
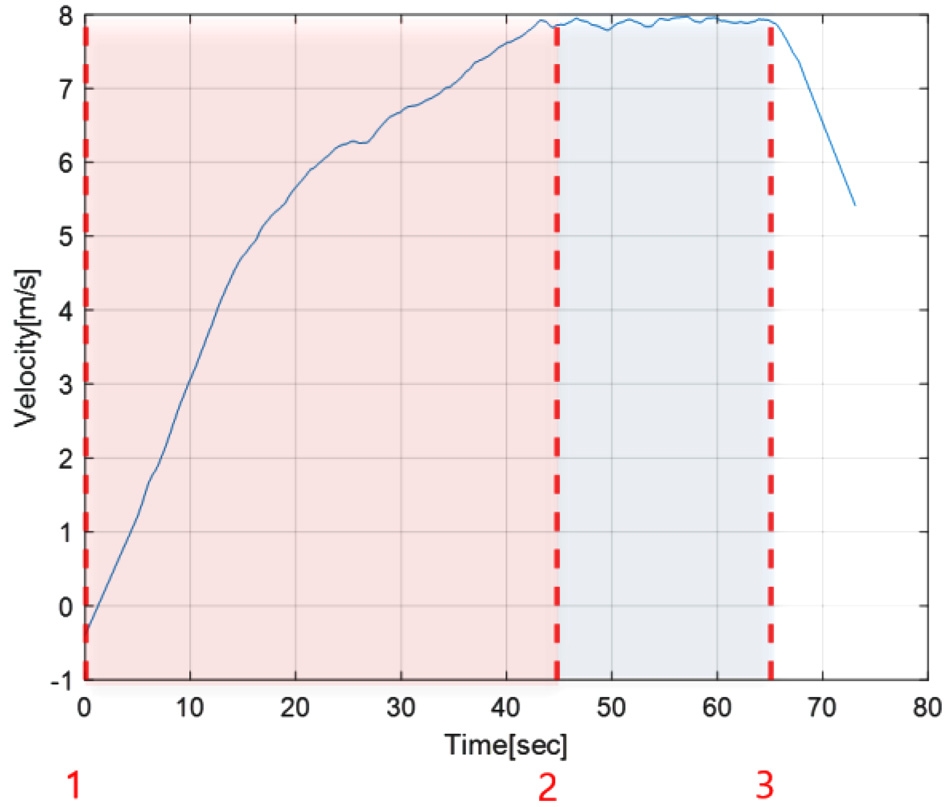
각속도 동적 식별 계수를 추정하는 방법대로, 입력 추력(
δT)에 대한 출력 속도(
v) 동적 모델도 게인
Kv와 시정수
Tv를 가지는 1차 선형 시스템으로 가정한다.
11,12 Figs. 6과
7과 같이 빨간색 영역의 가속도 직진 구간(1, 2)과 파란색 영역의 등속도 직진 구간(2, 3)으로 구분하여,
식(15)부터
식(21)과 같이 게인
K^v과 시정수
T^v를 추정한다.
Fig. 6Thrust input of USV straight maneuvering
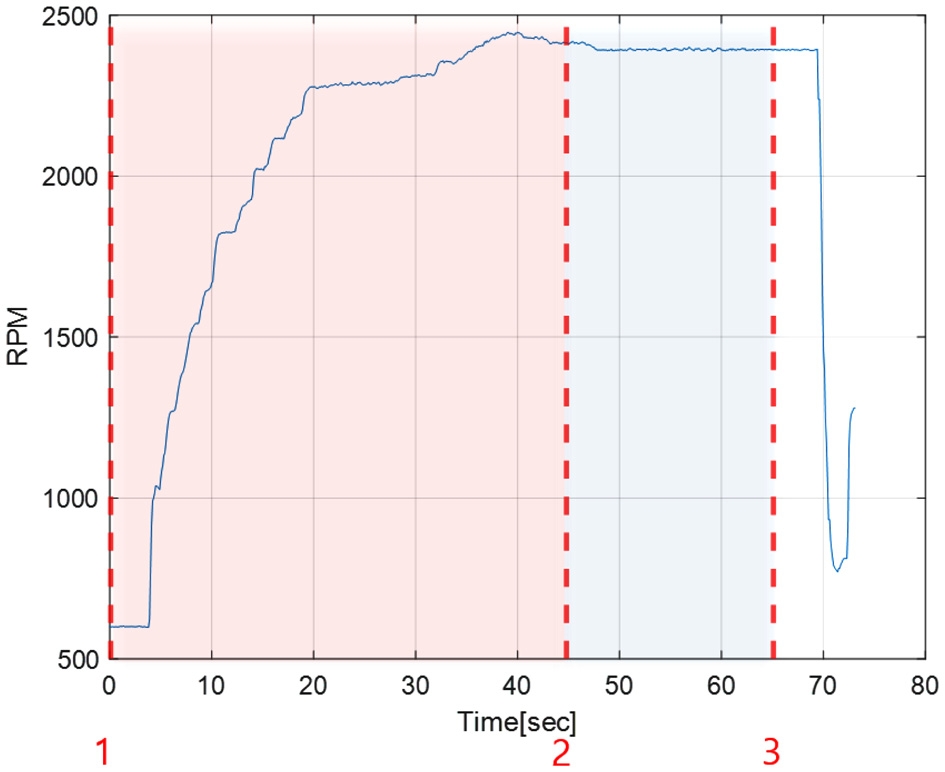
Fig. 7Velocity output of USV straight maneuvering
3. 무인수상정 경로 추종 제어
3.1 무인수상정 제어
식별된 무인수상정 동적모델을 이용하여 자세 및 속도 제어기를 설계한다. 자세 제어기는
Fig. 8과 같이 이중 루프 피드백 구조로 비례미분 제어기로 구성하였다. 구성한 자세 제어기 구조의 입력 조타각(
δS)은
식(22)와 같으며,
식(8)을 자세변수에 대한 미분값으로 표현하고, 이를 입력 조타각(
δS)에 대해 정리하면
식(23)과 같다.
식(22)와
식(23)은 같으므로
식(24)와 같이 정리될 수 있으며, 이는
식(25)와 같이 디자인 제어 파라미터 감쇠비(
ζ)와 공진주파수(
ωn)를 가지는 2차 시스템이다.
18 식(24)와
식(25)는 같으므로 자세 제어 비례 게인(
K1)와 자세 제어 미분 게인(
K2)는
식(25)와
식(26)과 같이 동적 모델 계수(
Kr,
Tr)와 함께 나타낼 수 있다.
Fig. 8Attitude control of USV scheme

Fig. 9Velocity control of USV scheme

3.2 예인형 무인수중정 기반 무인수상정 경로 추종
예인형 무인수중정의 운동은
식(3)부터
식(7)에서 알 수 있듯이 무인수상정의 운동과 예인케이블 길이에 의해 종속된다. 종속된 관계를 역이용하여 무인수중정의 각속도, 자세, 속도와 같은 경로계획 프로파일이 정해진다면, 무인수상정의 경로계획을 세울 수 있다.
식(32)는 무인수중정의 각속도(
rz,profileb,UUN) 프로파일을 충족하기 위한 지향되어야 할 무인수중정과 무인수상정과의 자세 차이(
φdesird)를 말한다.
식(32)의
φdesird가 결정되면,
식(33)과 같이 지향되어야 할 무인수상정의 자세(
ψdesiredUSV)값이 된다. 그리고
식(34)는 무인수중정의 속도(
vx,profileb, UUV) 프로파일을 충족하기 위한 지향되어야 할 무인수상정의 속도(
vx,desirdb, USV)를 나타낸다. 지향되어야 할 무인수상정의 속도 및 자세가 결정되면,
식(1)에 따라 무인수상정의 경로가 결정되며, 이는 무인수상정의 경로점으로 이용하여 유도명령을 내릴 수 있다.
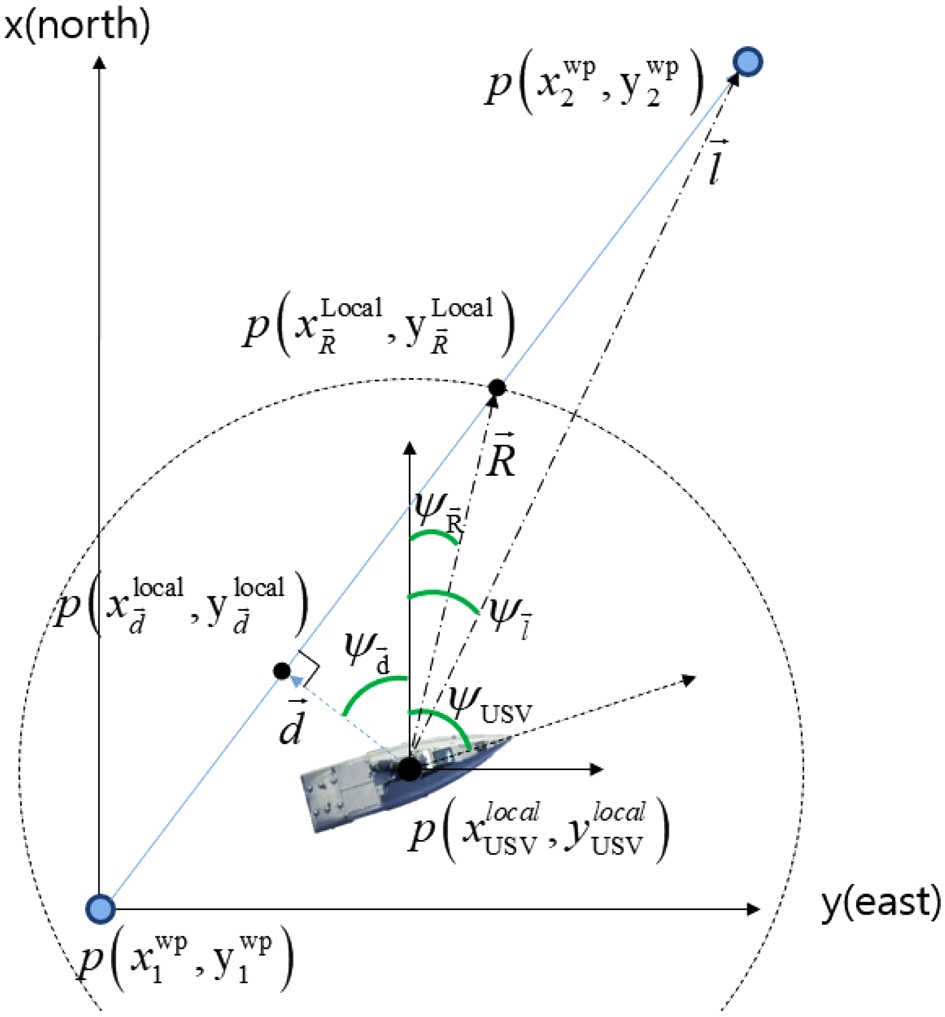
Fig. 10은 무인수상정의 경로점에 대한 유도기법을 설명한다. 무인수상정의 현재 위치(
xUSVlocal,yUSVlocal)와 첫 번째 경로점(
x1wp,y1wp) 및 두 번째 경로점(
x2wp,y2wp)이 있다면, 기존의 무인수상정 Line of Sight (LOS) 지향벡터(
l→) 및 LOS 지향자세(
ψl→)를 통해 유도명령을 내릴 수 있다.
19 LOS 방법으로는 위치 및 자세가 점진적으로 경로계획과 수렴하여 경로계획 오차가 줄어들지만, 경로계획 오차가 존재한 상태로 경로 추종이 이루어지므로 효율적인 경로 추종 방법이 필요하다.
Fig. 10Guidance of USV scheme
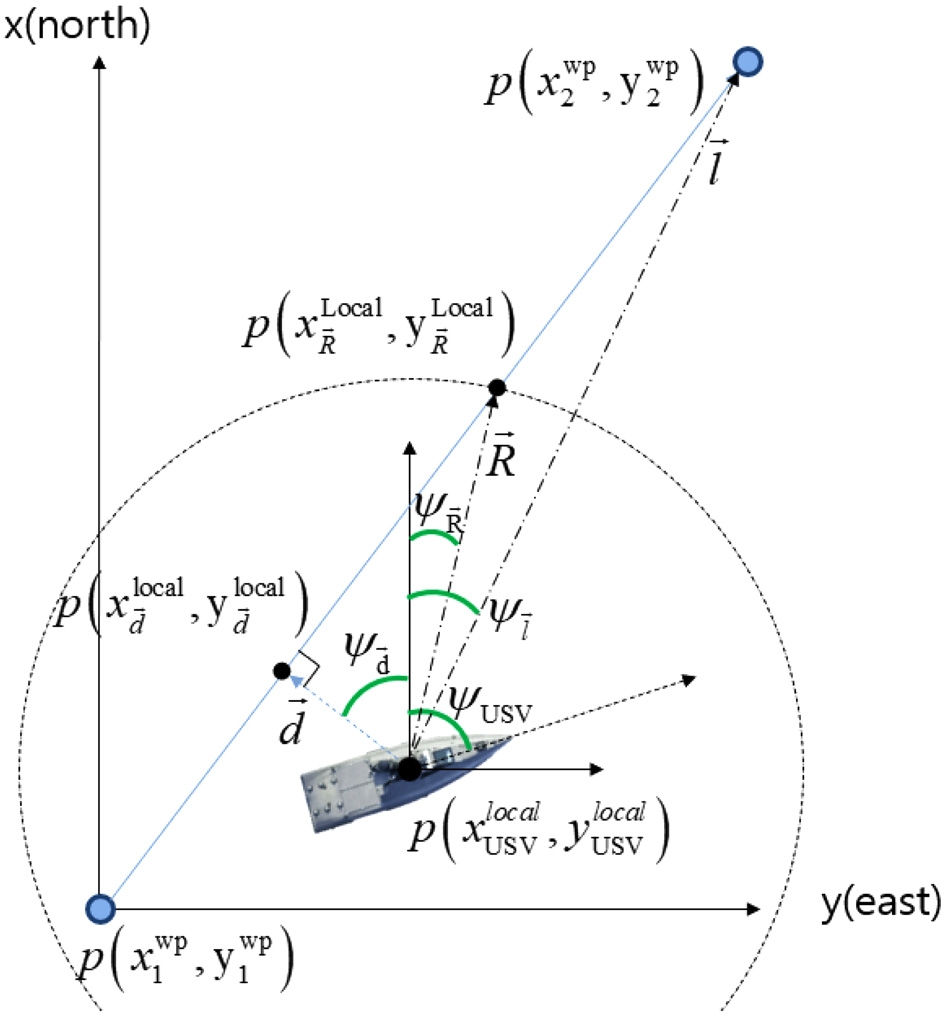
본 논문에서는 경로 추종 효율을 높이고자, 수선거리(
d→)를 도입한다. 수선거리(
d→)는 현재의 위치를 기준으로 이전 경로점 및 다음 경로점의 경로선과의 최단거리이다. 수선거리(
d→)에 따라
Table 1과 같이 원거리에서는 수선위치(
xUSVlocal,yUSVlocal) 방향(
d→)으로의 지향자세(
ψd→)를 추가하였고 수선거리(
d→)가 원거리가 아닐 때는 거리별로 회전반경(
R)을 조절하여 기존의 LOS 방법의 지향자세(
ψR→,ψl→)를 적용하였다.
Table 1Heading desired of USV respect to perpendicular distance
Table 1
|
Condition |
ψdesired
|
|
d→ > 2R |
ψd→
|
|
R< d→ < 2R |
ψR2→
|
|
0.5R< d→ <R |
ψR1→
|
|
d→ < 0.5R |
ψ1→
|
4. 시뮬레이션 검증
4.1 무인수상정 동적 모델 식별 결과
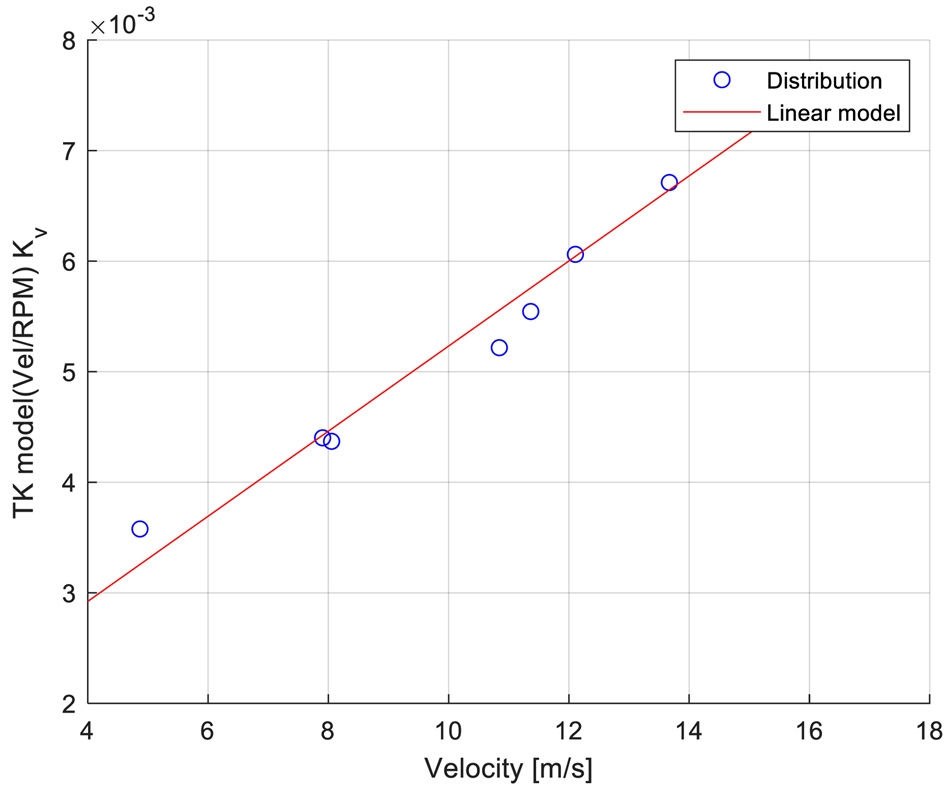
무인수상정의 동적 모델은 특정 속도(
u0)에 따라 달라지므로, 속도에 따른 적응 모델이 필요하다. 본 논문에서는 속도 구간(4.87-16.02 m/s)의 9개 직진 시험 데이터과 조타각 ±10° 내외인 상태에서 속도 구간(4.02-8.74 m/s)의 6개 선회 시험 데이터를 획득하였다. 획득한 시험 데이터를 바탕으로 추정한 동적 모델 식별 계수(
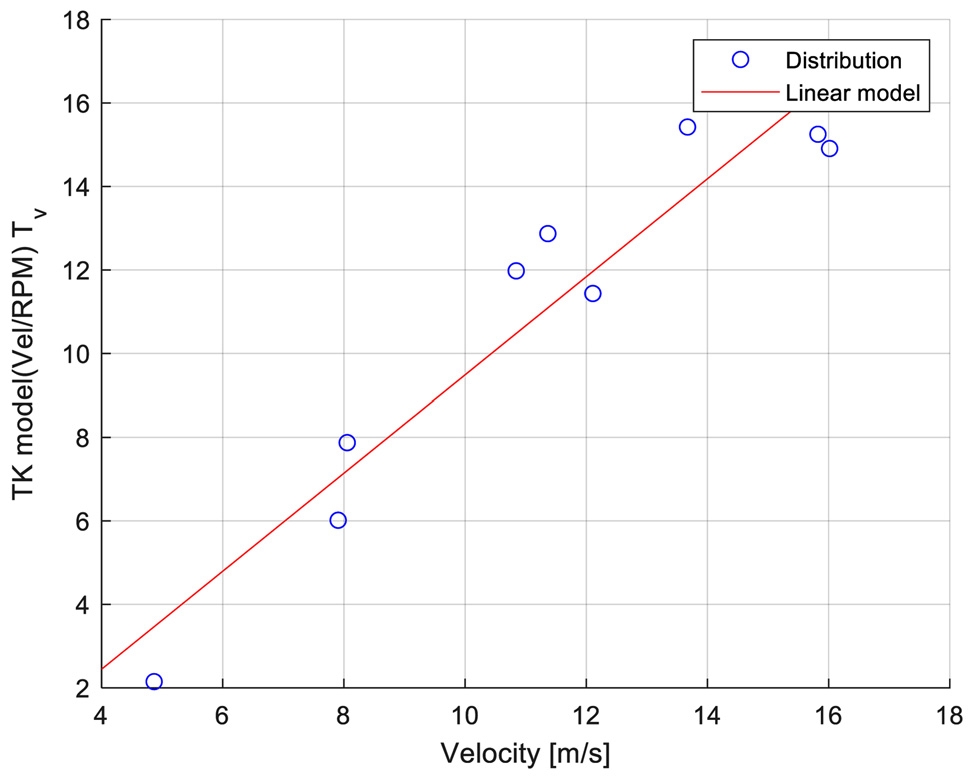
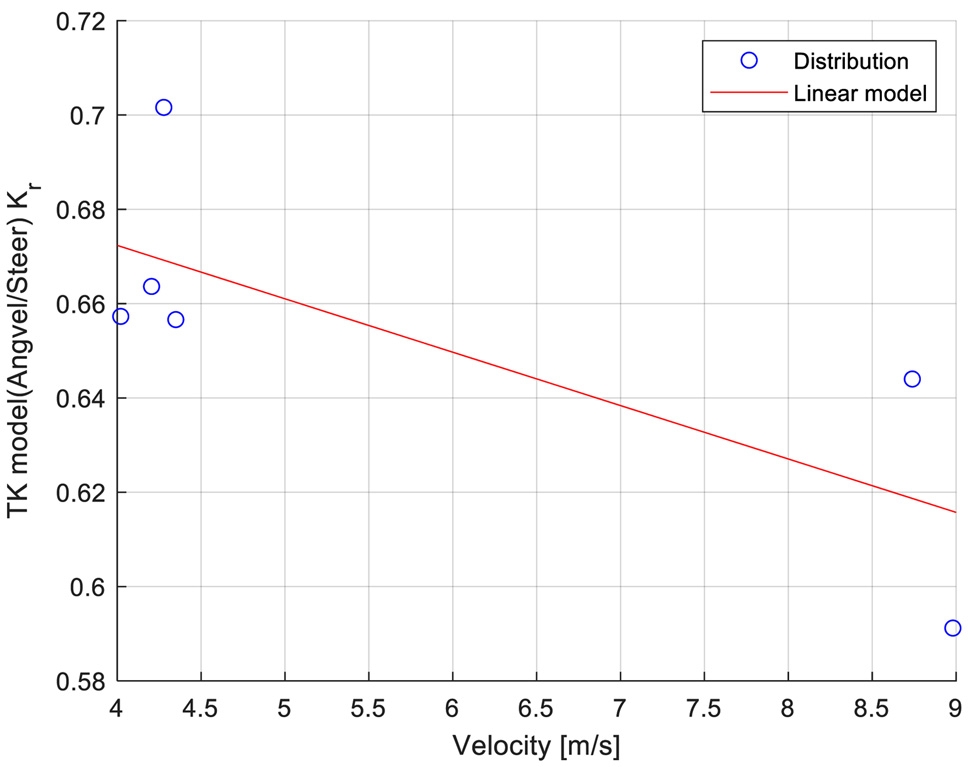
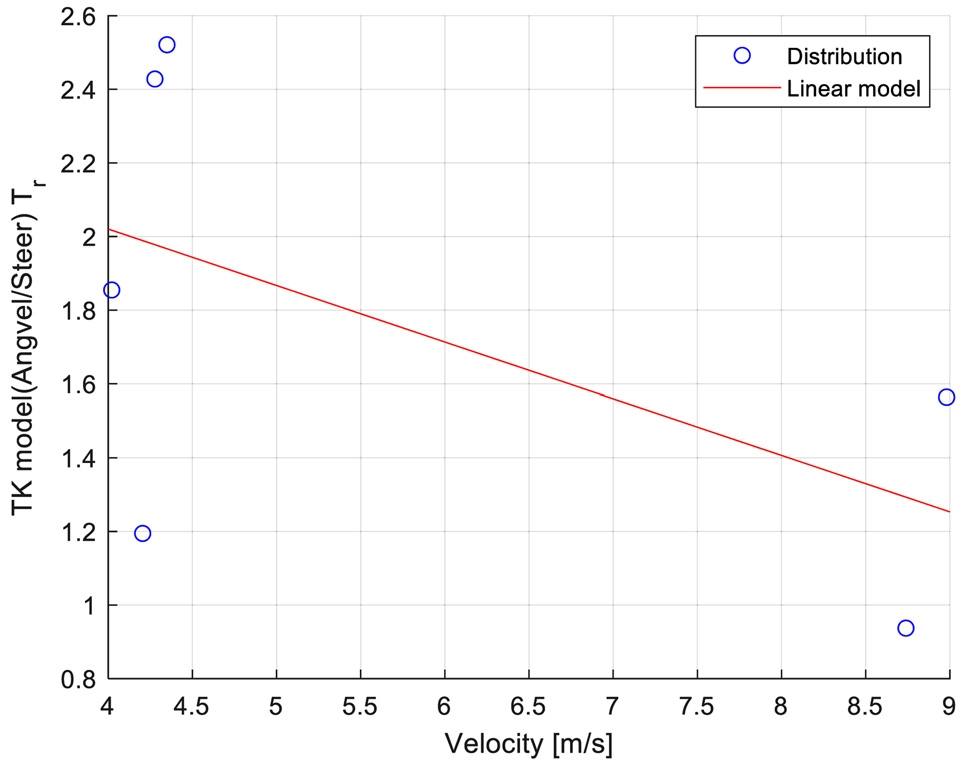
K^v,T^v,K^r,T^r) 분포는
Figs. 11부터
14와 같이 속도에 따라 선형적으로 나타나므로, 최소제곱법을 통해 1차 선형 모델로 가정하였다. 동적 모델 식별 계수 결과는
Table 2와 같다.
Fig. 11Coefficient (K^v) identification versus velocity of dynamic model (Velocity versus RPM)
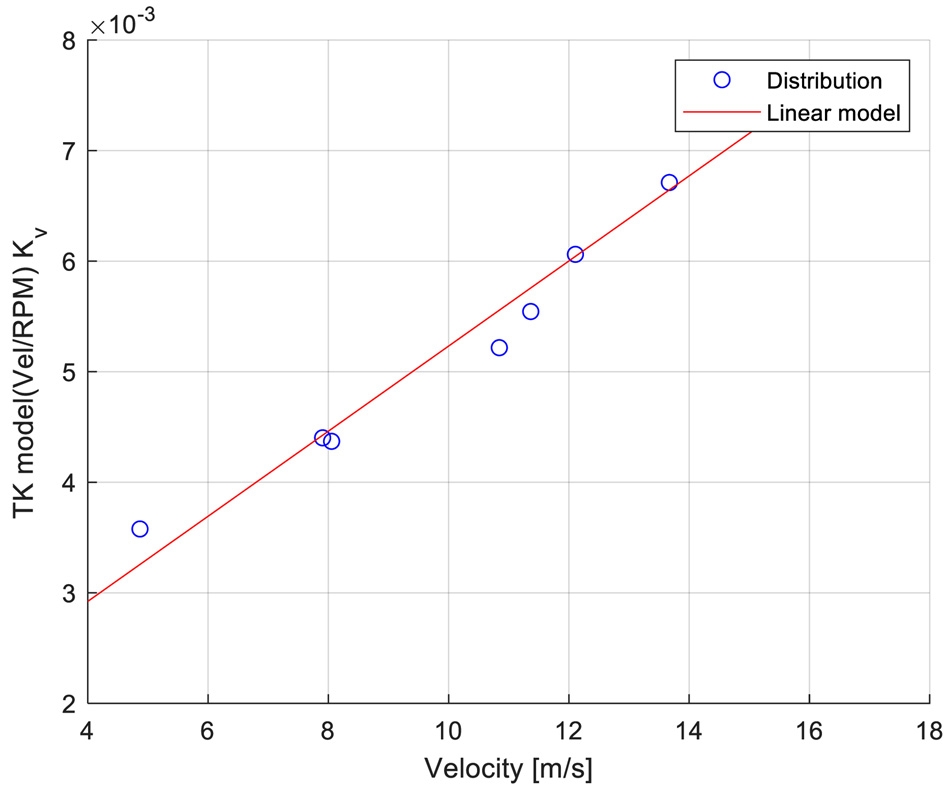
Fig. 12Coefficient (T^v) identification versus velocity of dynamic model (Velocity versus RPM)
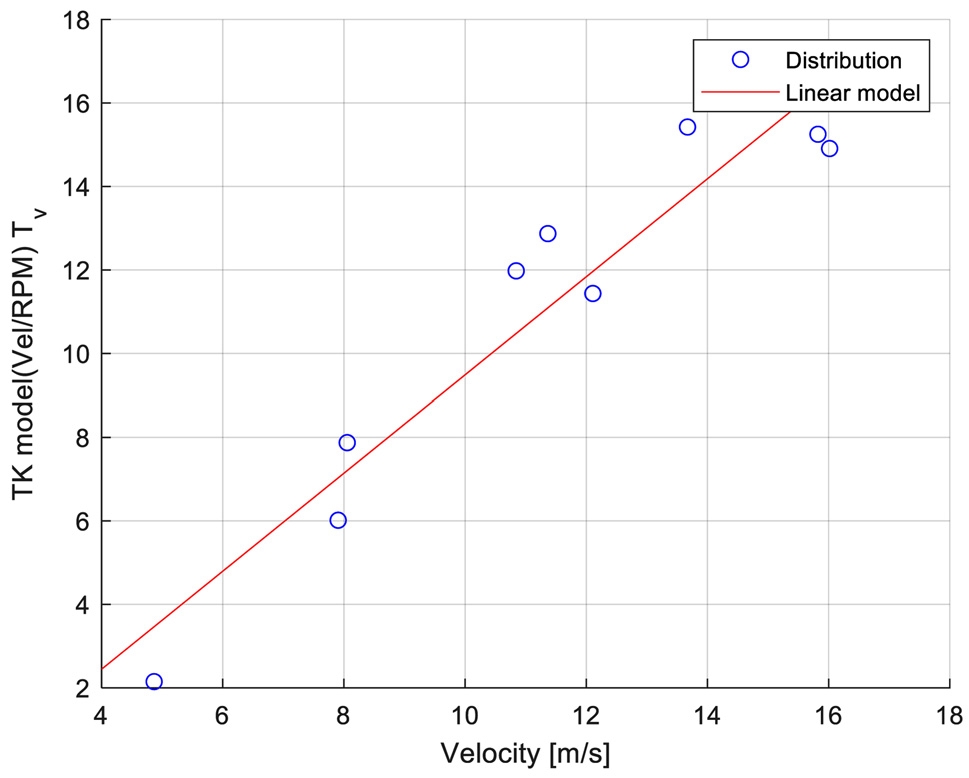
Fig. 13Coefficient (K^r) identification versus velocity of dynamic model (Angular velocity versus steer)
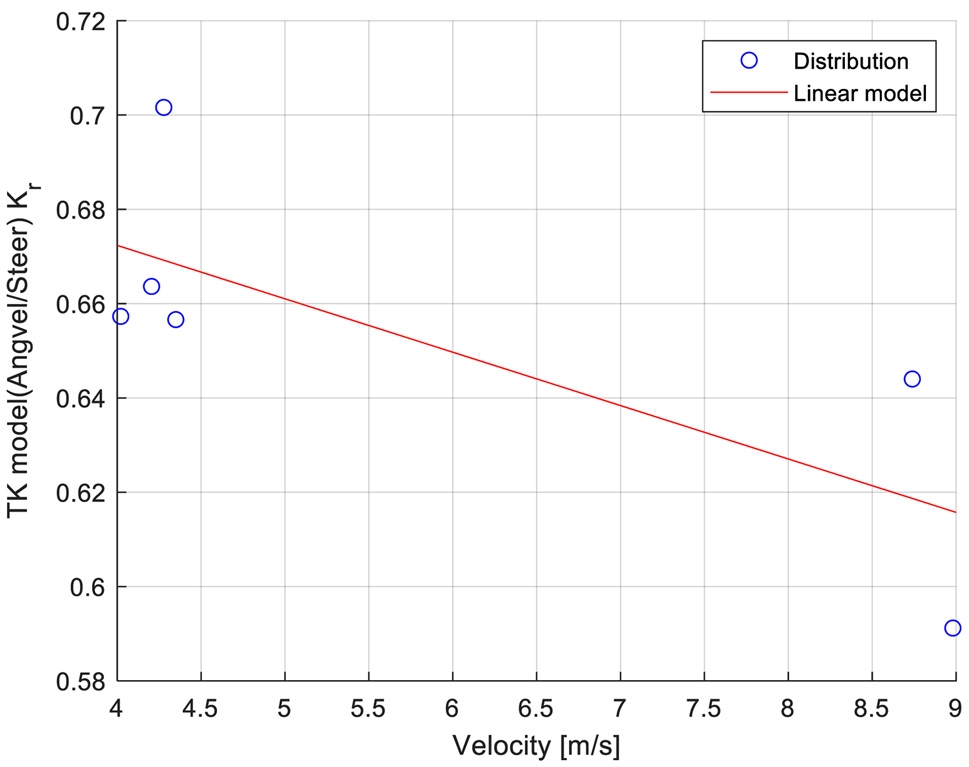
Fig. 14Coefficient (T^r) identification versus velocity of dynamic model (Angular velocity versus steer)
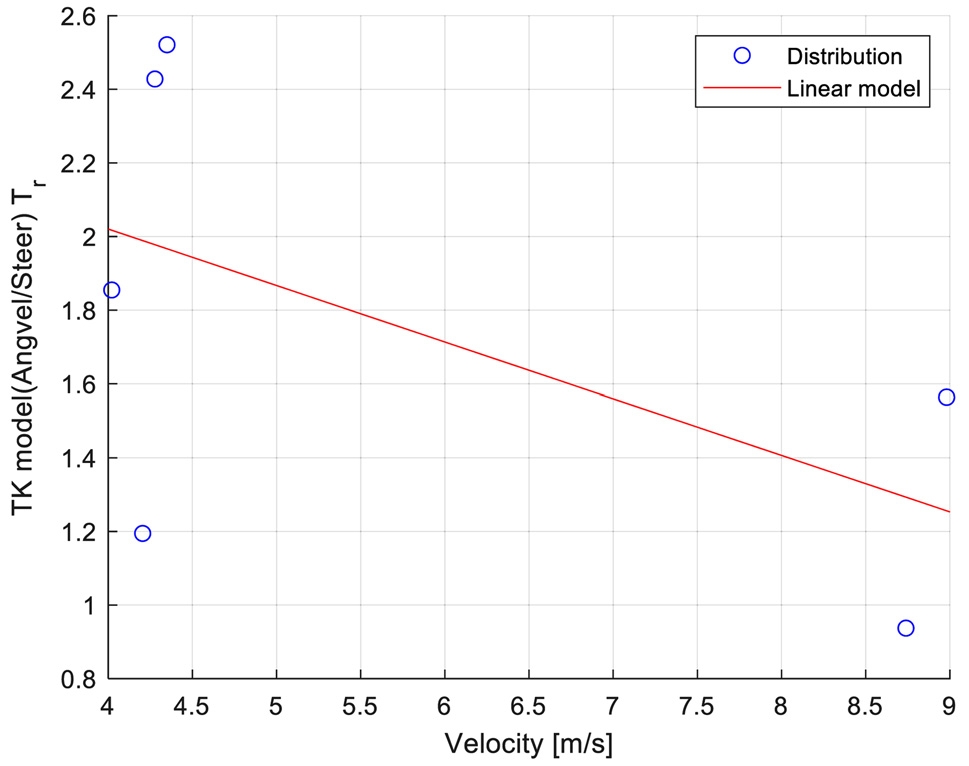
Table 2Dynamic model identification coefficients of USV respect to velocity
Table 2
|
Coefficient |
f(u) |
|
Kv
|
0.0004·u + 0.0014 |
|
Tv
|
1.1737·u - 2.2474 |
|
Kr
|
-0.0113·u + 0.7176 |
|
Tr
|
-0.1534·u + 2.6341 |
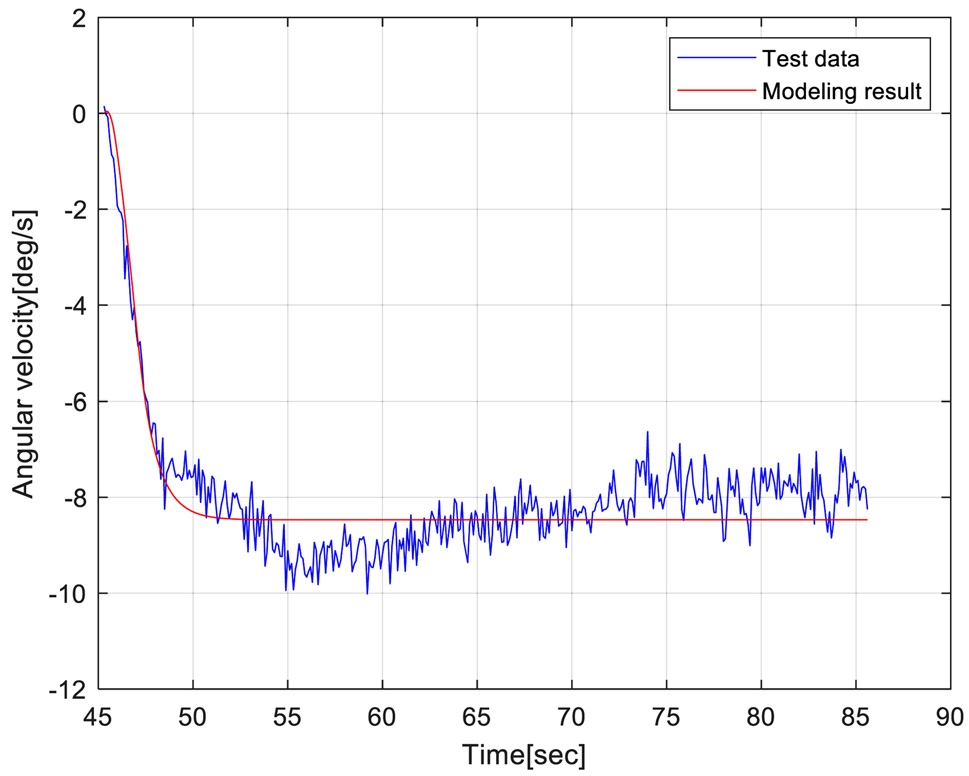
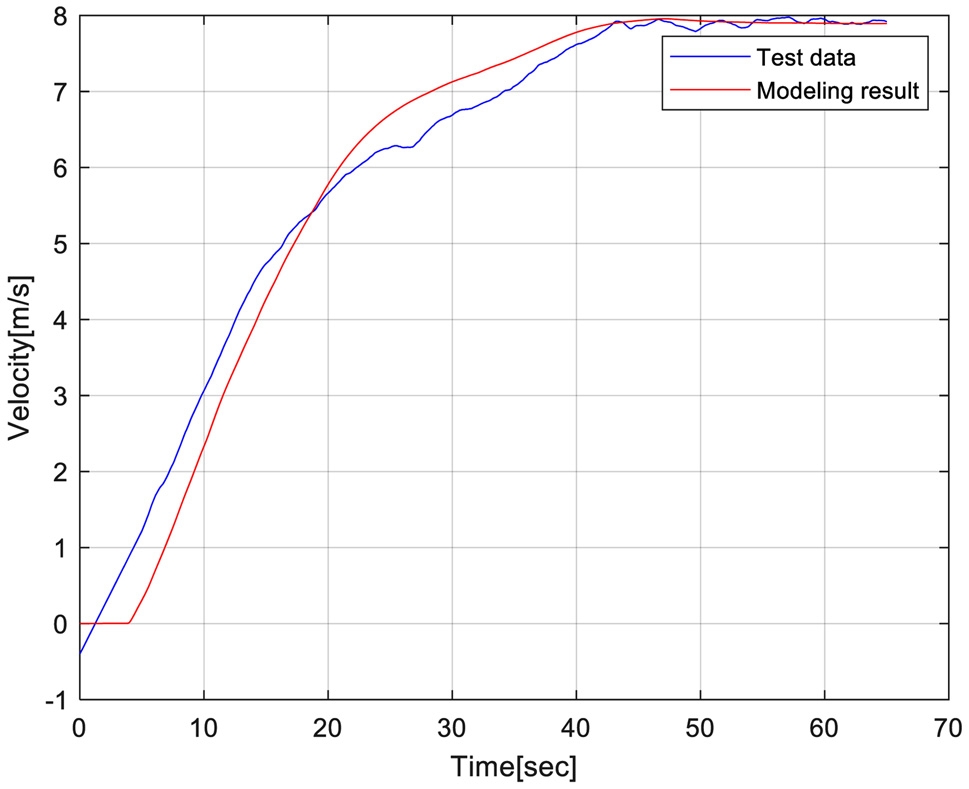
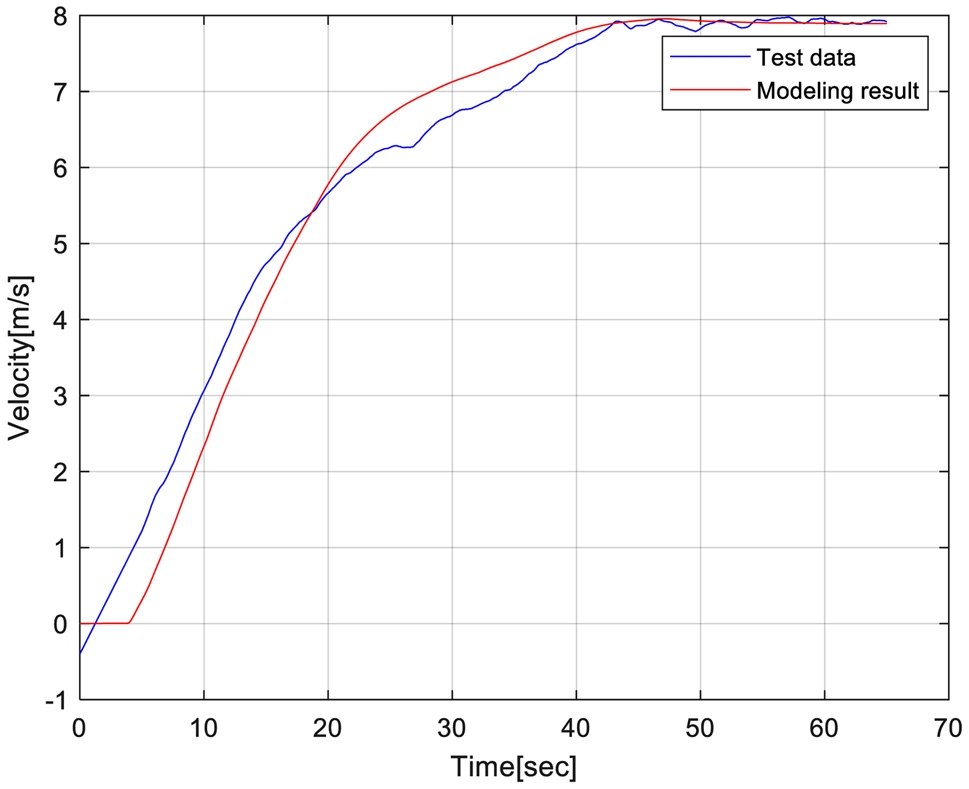
동적 모델 식별 계수를 적용한 동적 모델을 검증하고자 입력 값에 대한 시험 데이터와 모델 결과값을 비교하였다.
Fig. 15의 파란색은 입력 조타각(
δr)에 대한 출력 각속도(
r) 시험 데이터이며, 빨간색은 입력 조타각(
δr)에 대한 각속도(
r) 동적 모델 결과이다. 시험 데이터 각속도와 각속도 동적 모델 결과와 유사함을 확인하였다. 마찬가지로
Fig. 16의 파란색은 입력 추력(
δT)에 대한 출력 속도(
v) 시험 데이터이며, 빨간색은 입력 추력(
δT)에 대한 속도(
v) 동적 모델 결과이다. 시험 데이터 속도와 속도 동적 모델 결과와 유사함을 확인하였다.
Fig. 15USV angular velocity dynamic model
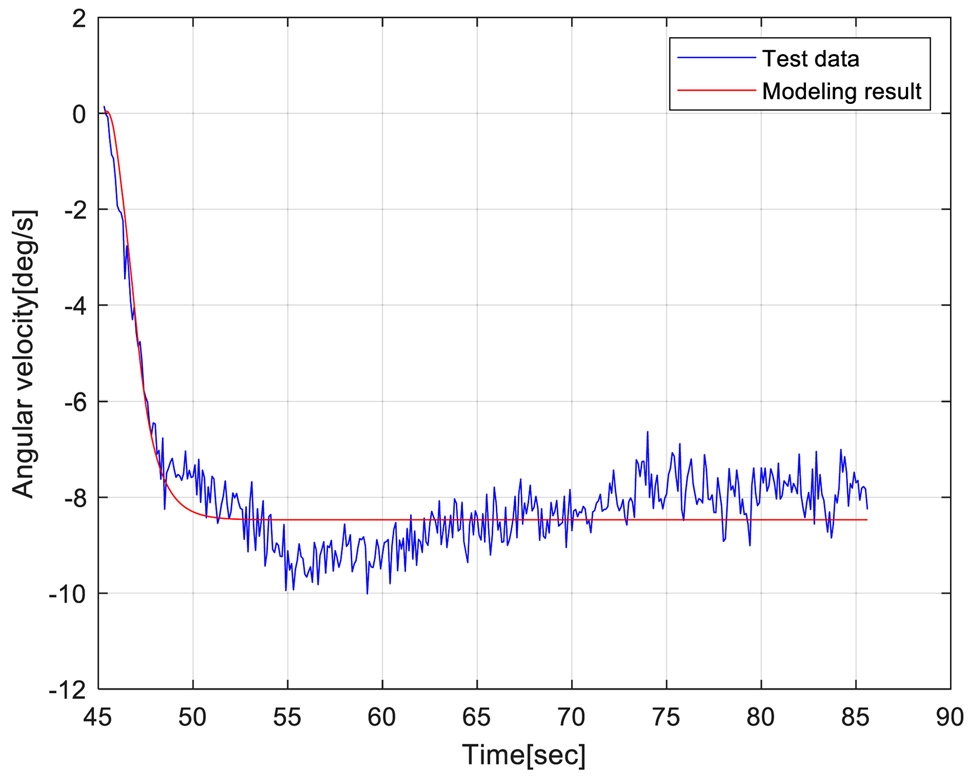
Fig. 16USV velocity dynamic model
4.2 무인수상정 제어 결과
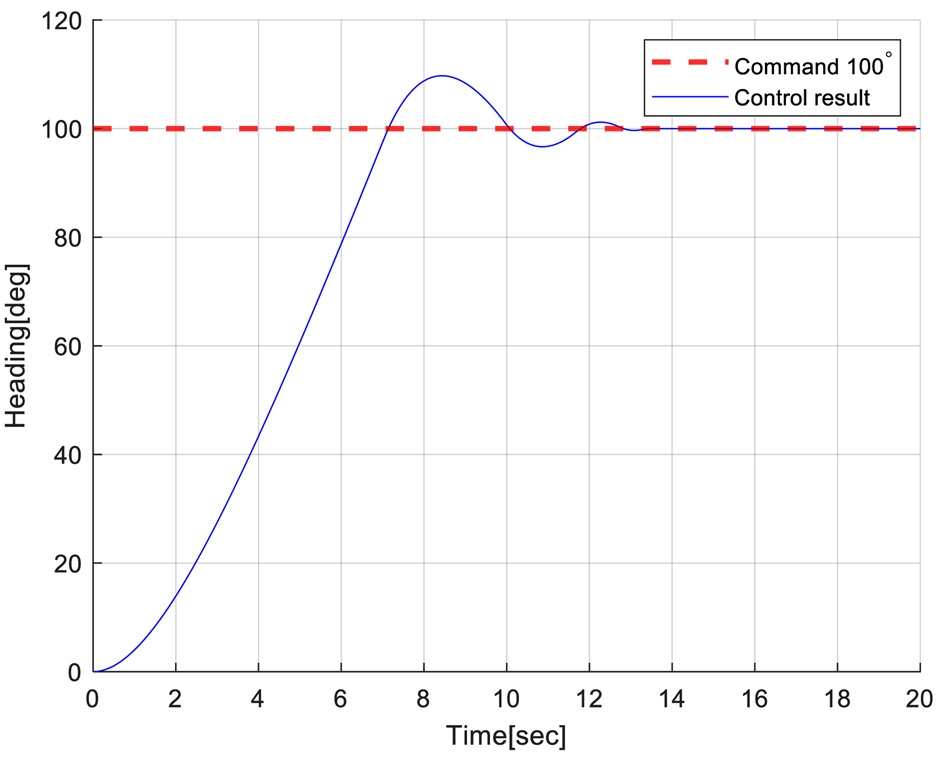
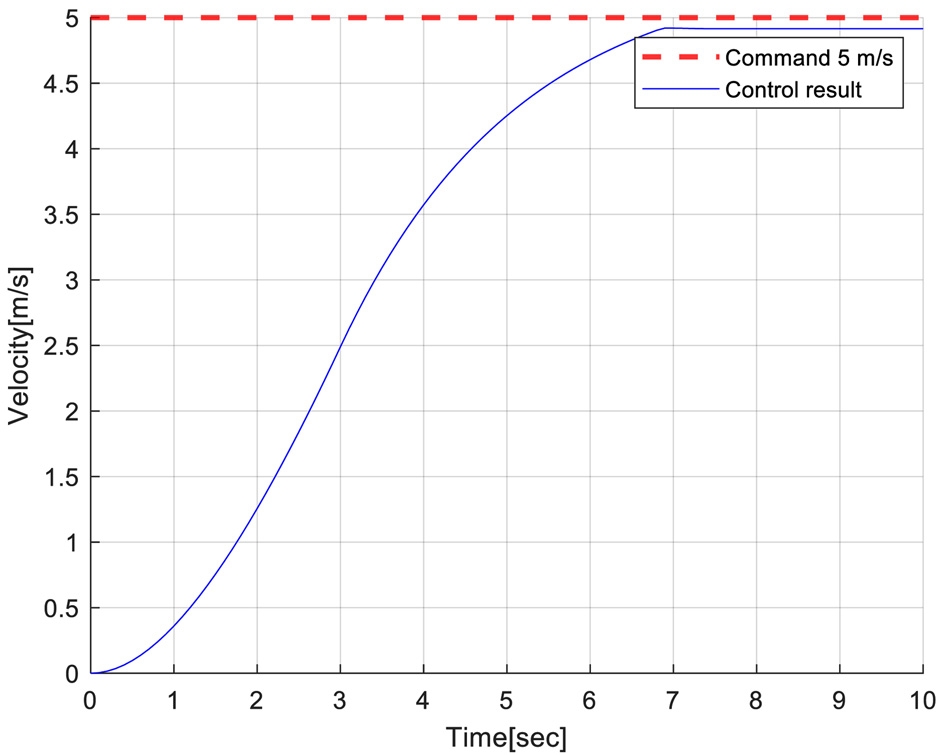
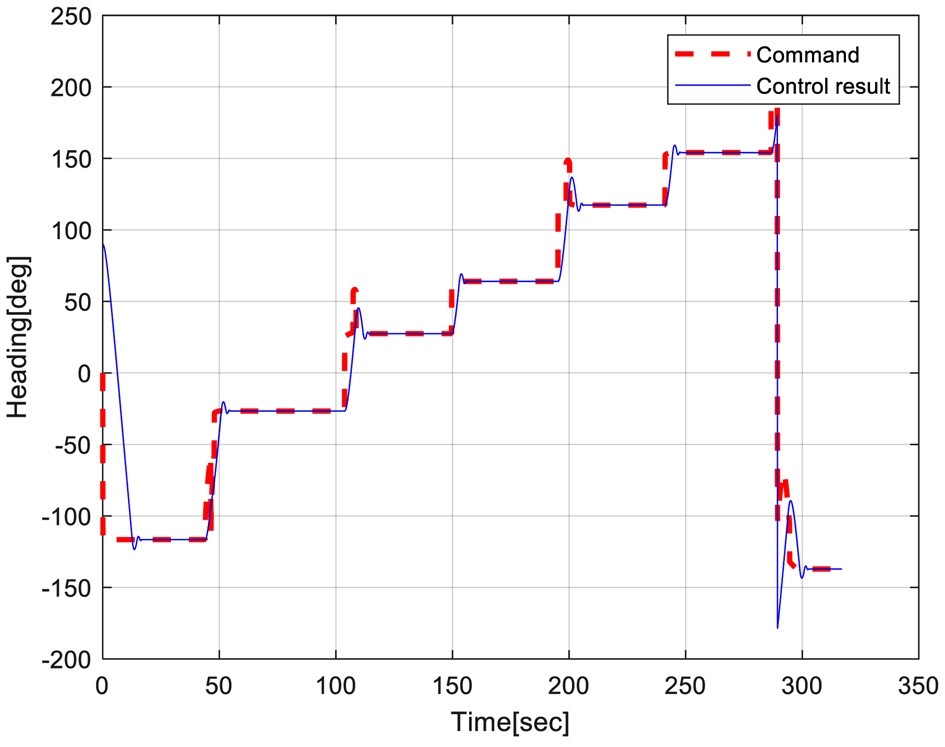
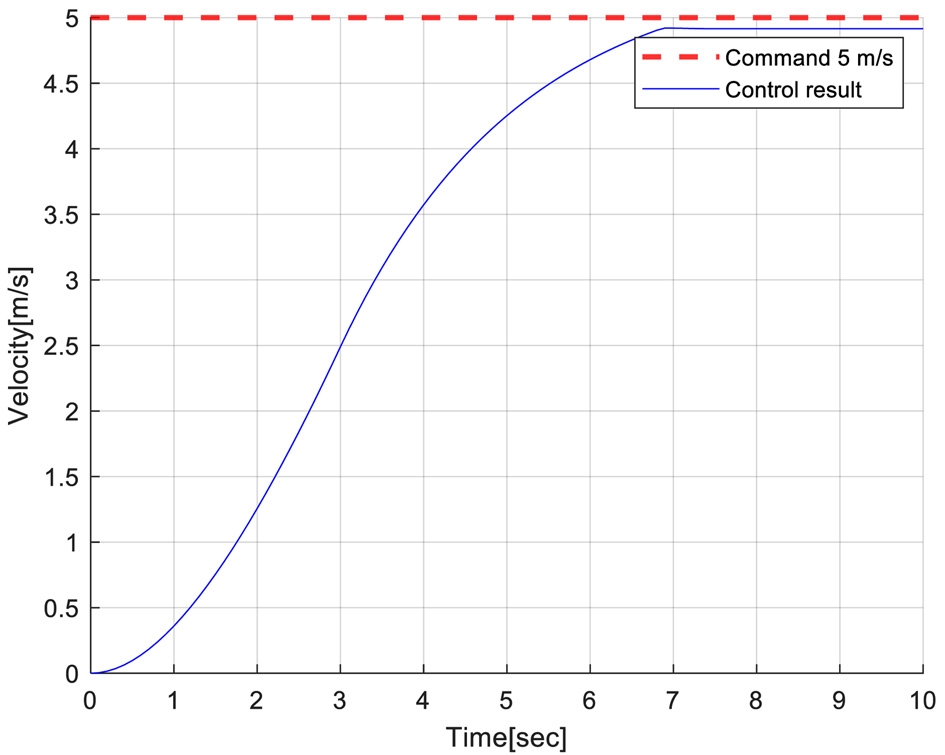
Fig. 17은 무인수상정의 헤딩 명령에 따른 헤딩 결과이다. 초기 헤딩 0에서 100° 헤딩 명령을 주었을 때, 헤딩 명령값으로 수렴함을 확인하였다. 그리고
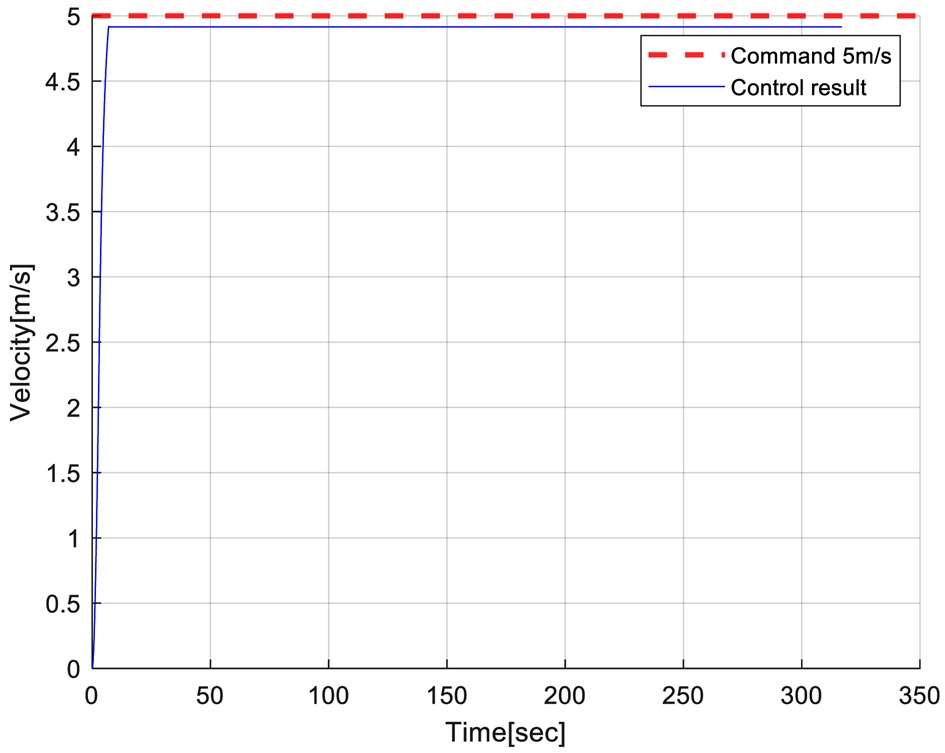
Fig. 18은 무인수상정의 속도 명령에 따른 속도 결과이다. 초기 속도 0에서 5 m/s 속도 명령을 주었을 때, 속도 명령값으로 근접함을 확인하였다.
Fig. 17USV heading control
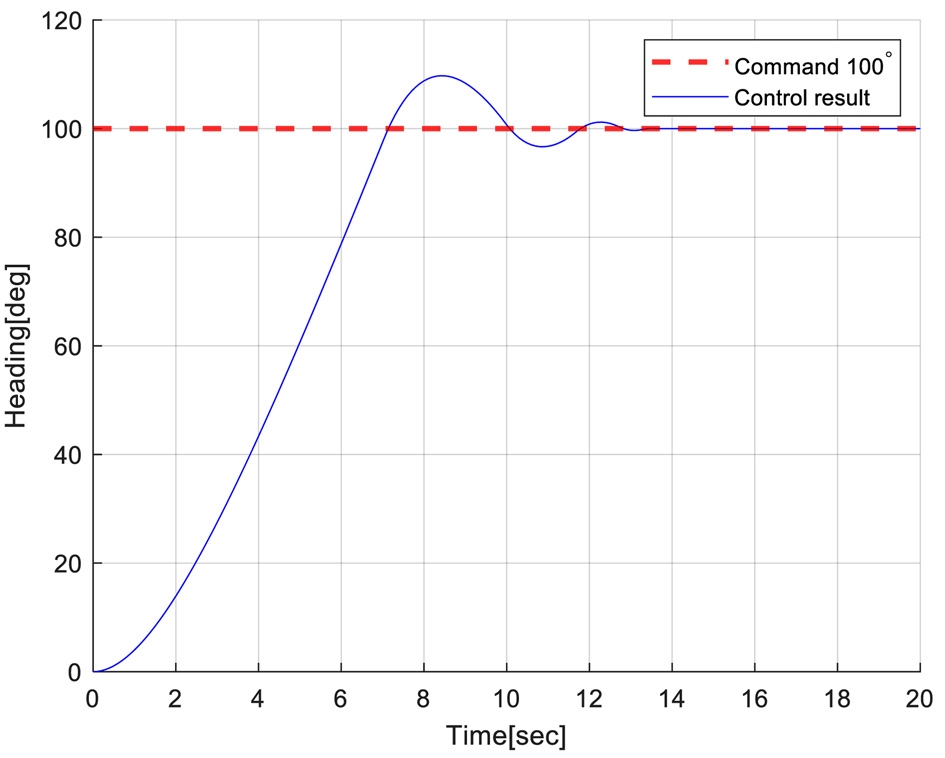
Fig. 18USV velocity control
4.3 무인수상정 경로 추종 제어 결과
4.3.1 무인수상정 경로 추종 제어
무인수중정 계획경로 기반 무인수상정 경로 추종 제어 검증에 앞서, 무인수상정만의 경로 추종 제어를 검증하였다.
Figs. 19와
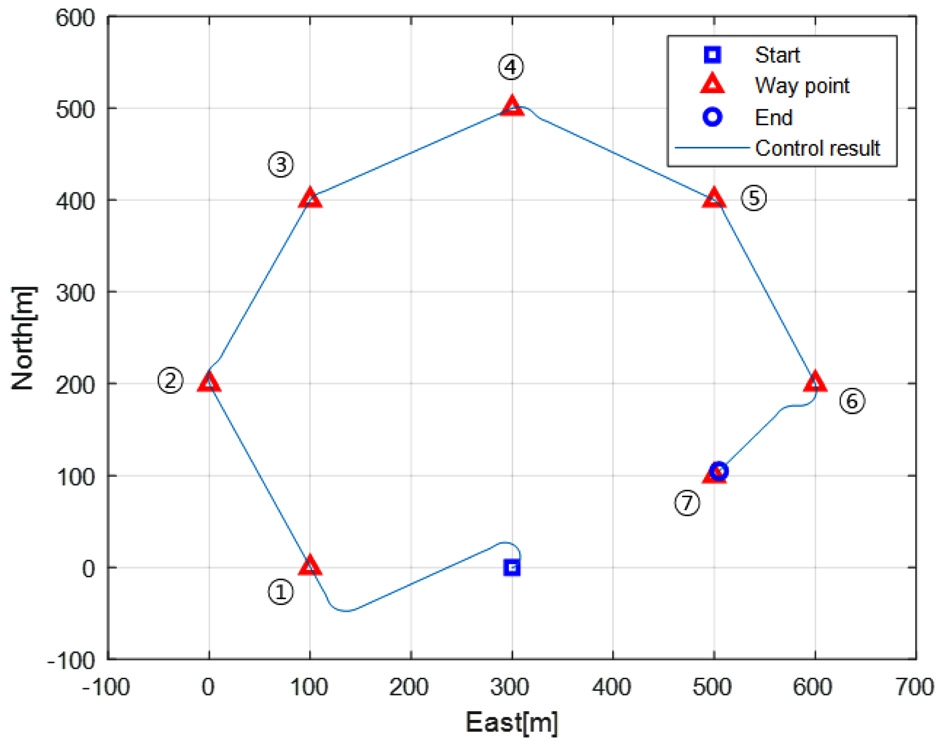
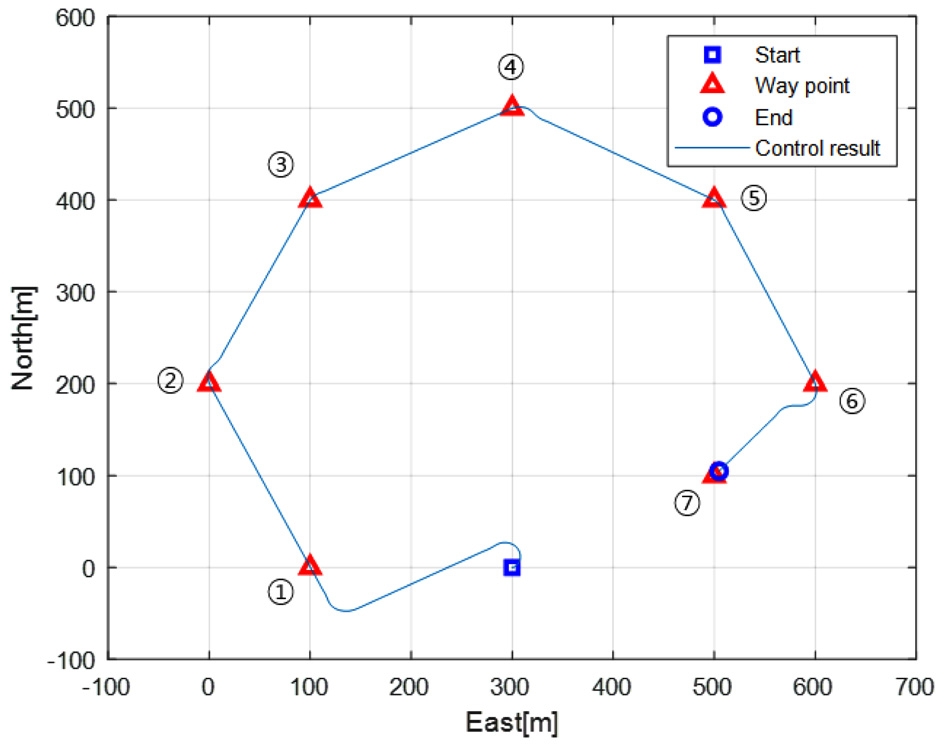
20과 같이 속도 및 자세 제어 명령값으로 출력됨을 확인하였으며, 21과 같이 7개의 경로점 설정 후 초기 헤딩 90° 및 초기 속도 0 m/s에서 주행을 시작하여 경로계획에 따라 추종됨을 확인하였다. 특히 시작 지점과
Fig. 21의 ① 경로점은 원거리이므로 ① 경로점과 ② 경로점과의 수선 방향으로 진입하였다. 그 결과, ① 경로점 진입 이전부터 경로선 방향과 일치하게 되므로 경로계획을 동적으로 추종할 수 있음을 확인하였다.
Fig. 19USV velocity control for waypoints
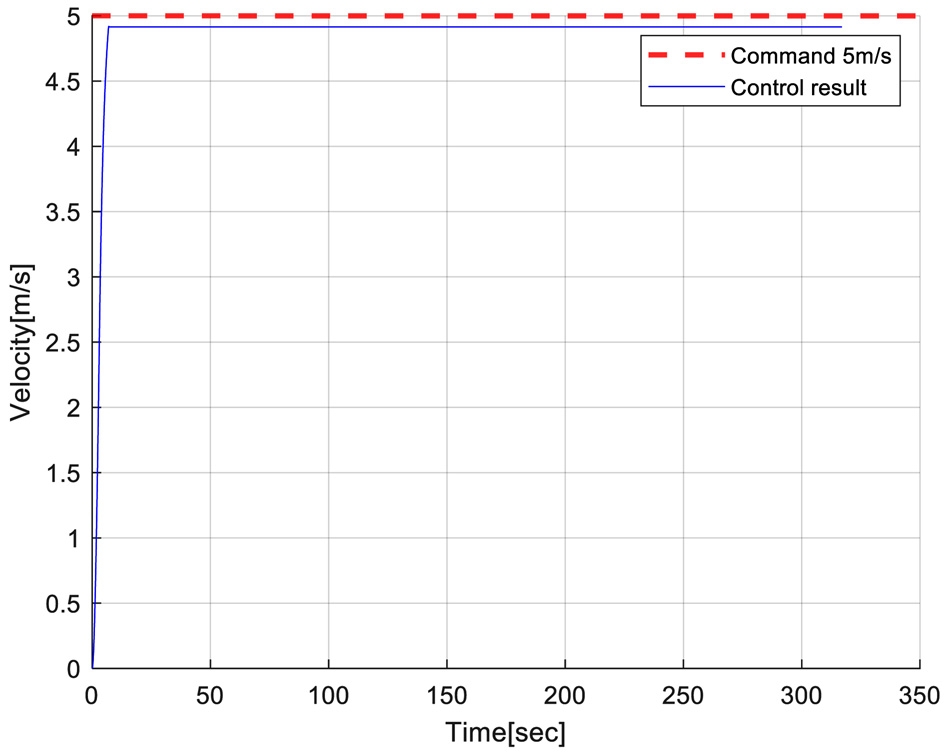
Fig. 20USV heading control for waypoints
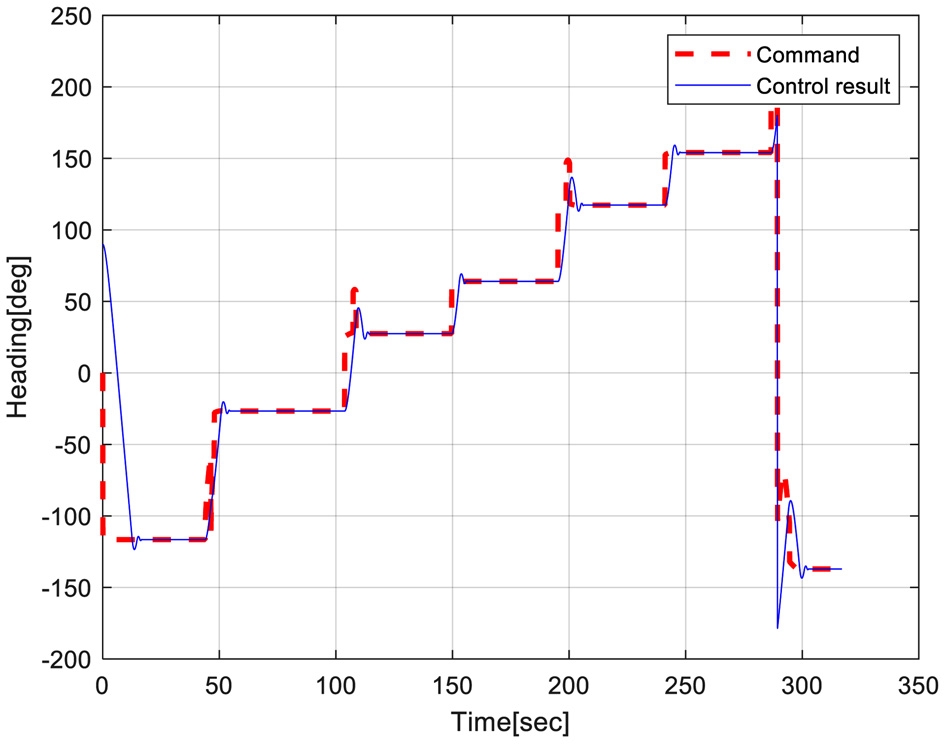
Fig. 21USV path-following control for waypoints
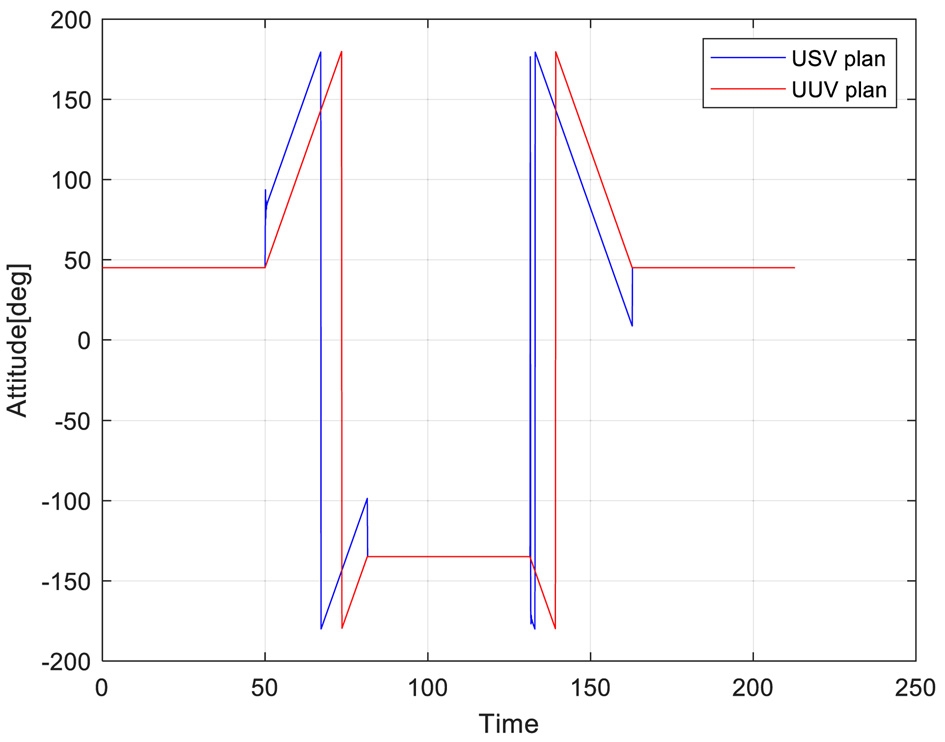
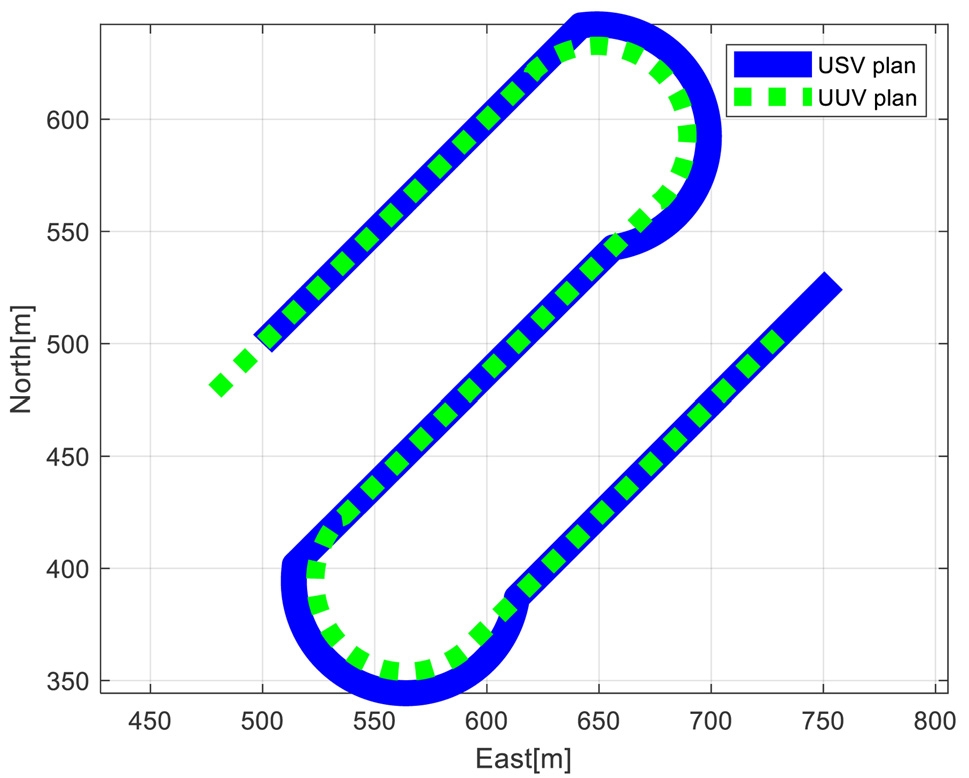
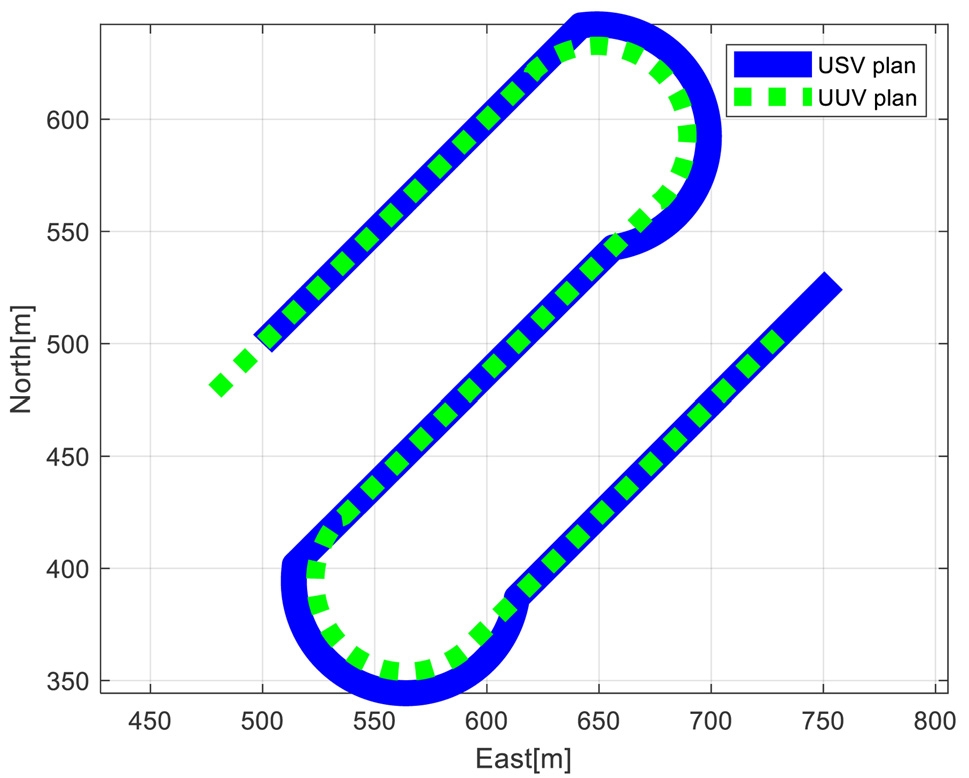
4.3.2 예인형 무인수중정 경로계획 기반 무인수상정 경로 추종 제어
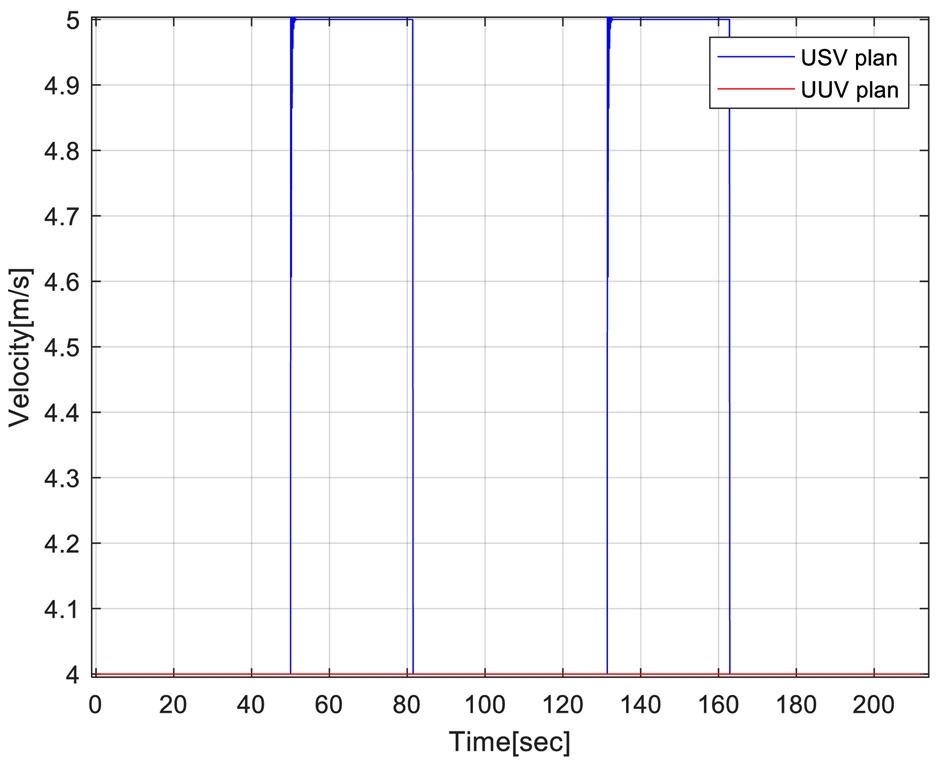
예인형 무인수중정 경로계획 기반 무인수상정 경로 추종 제어를 확인하기 앞서, 예인형 무인수중정의 경로계획은
Table 3과 같이 설정하였다. 무인수중정 경로계획에 따른 무인수상정의 경로계획(속도, 자세, 위치)은
Figs. 22부터
24와 같다.
Table 3Profile of UUV path plan
Table 3
|
No |
T [sec] |
vxUUN [m/s] |
ψUUV [deg] |
Description |
|
1 |
0-50 |
4 |
45 |
200 m North-east |
|
2 |
50-81.4 |
4 |
45 → 225.1
(= -134.9) |
R = 40 m, Half rotation
(Clockwise) |
|
3 |
81.4-131.1 |
4 |
-134.9 |
200 m South-west |
|
4 |
131.4-162.8 |
4 |
-134.9→-315
(= 45) |
R = 40 m, Half rotation
(Counter clockwise) |
|
5 |
162.8-212.8 |
4 |
45 |
200 m North-east |
Fig. 22USV velocity plan respect to UUV path plan
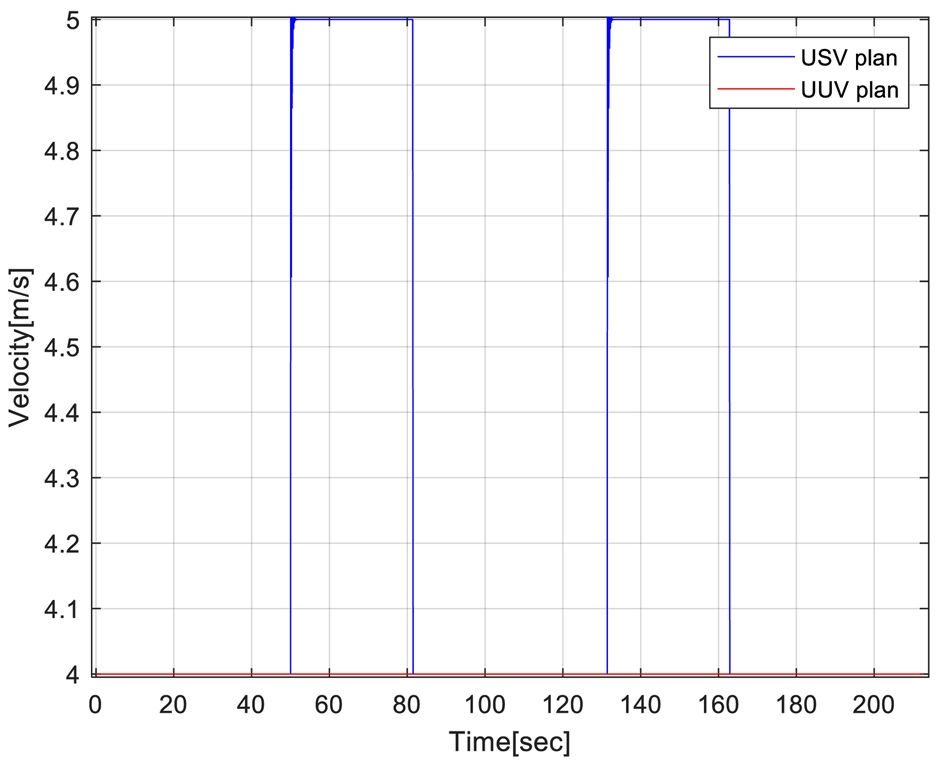
Fig. 23USV attitude plan respect to UUV path plan
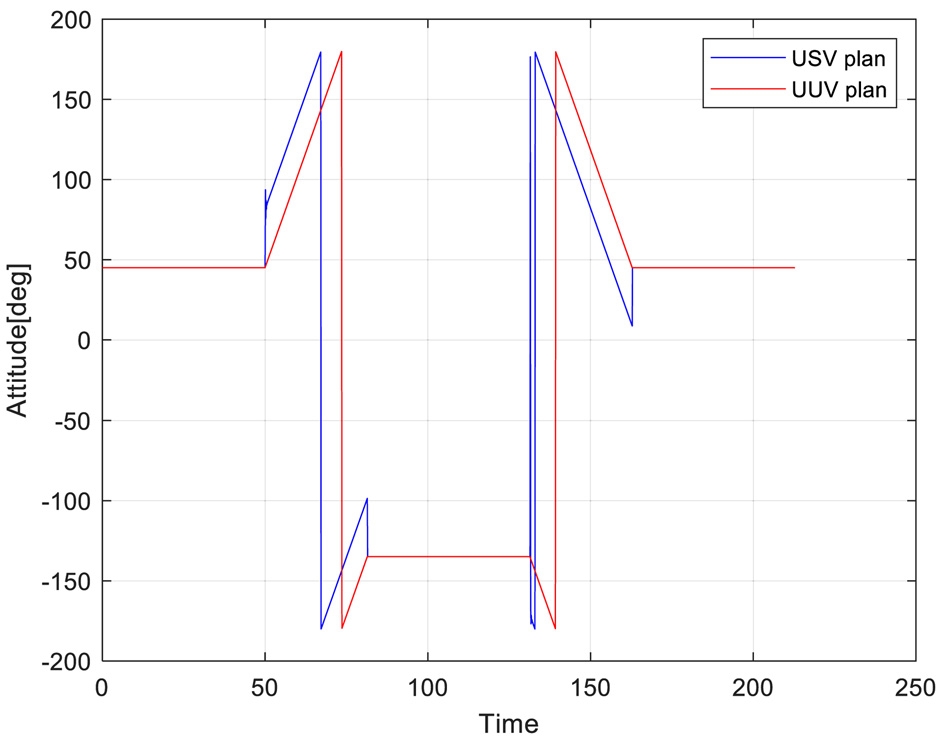
Fig. 24USV path plan respect to UUV path plan
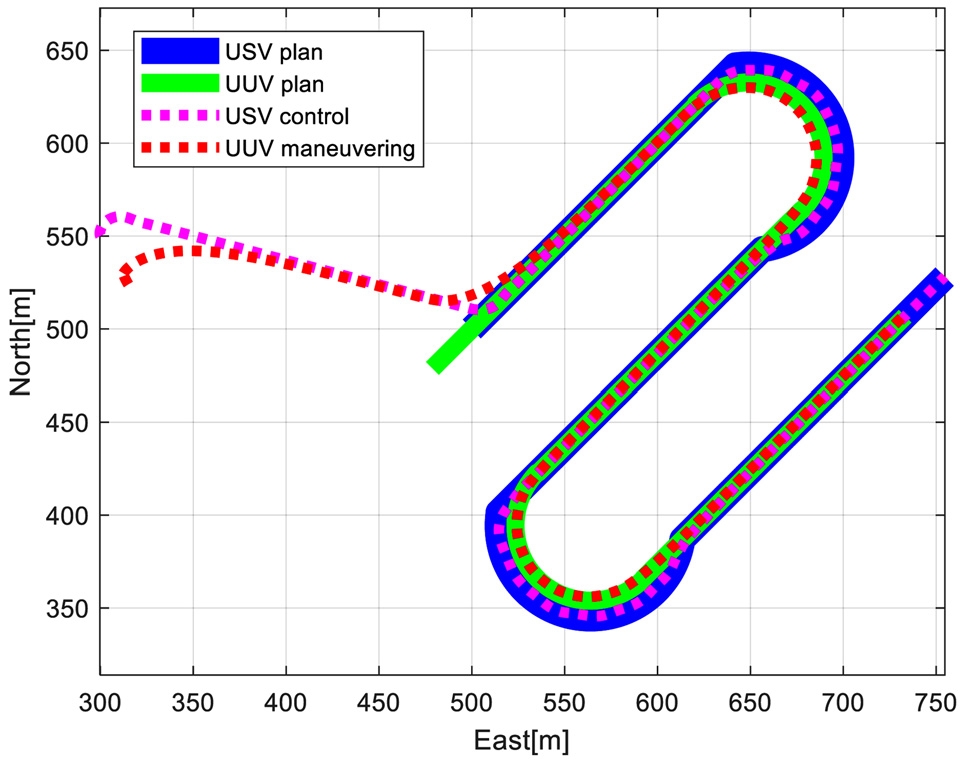
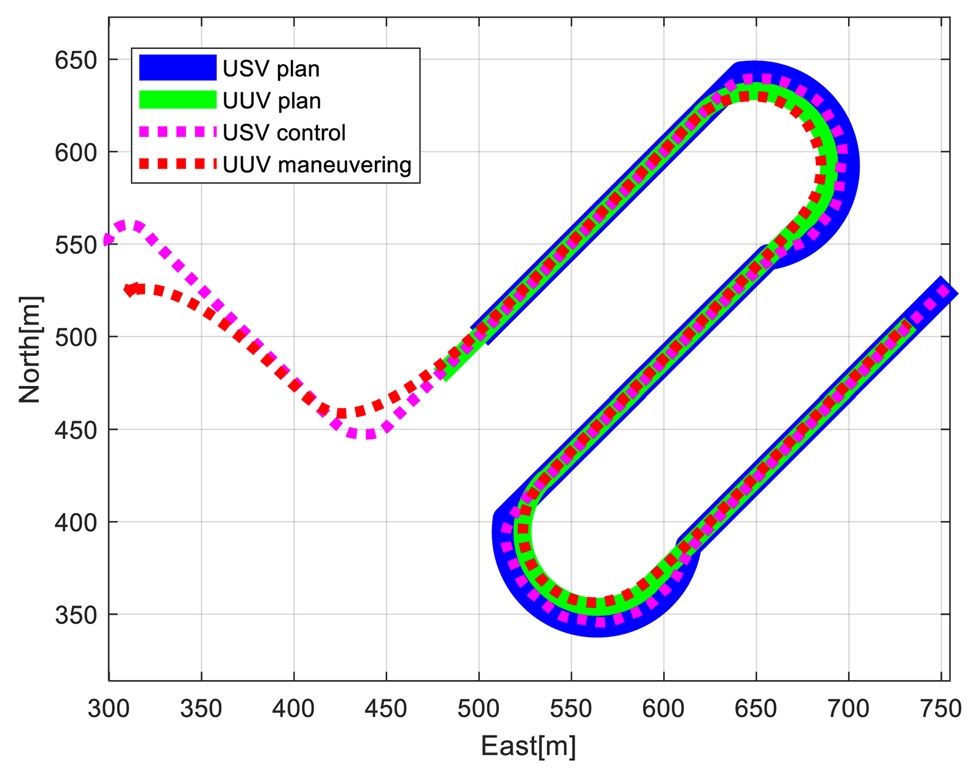
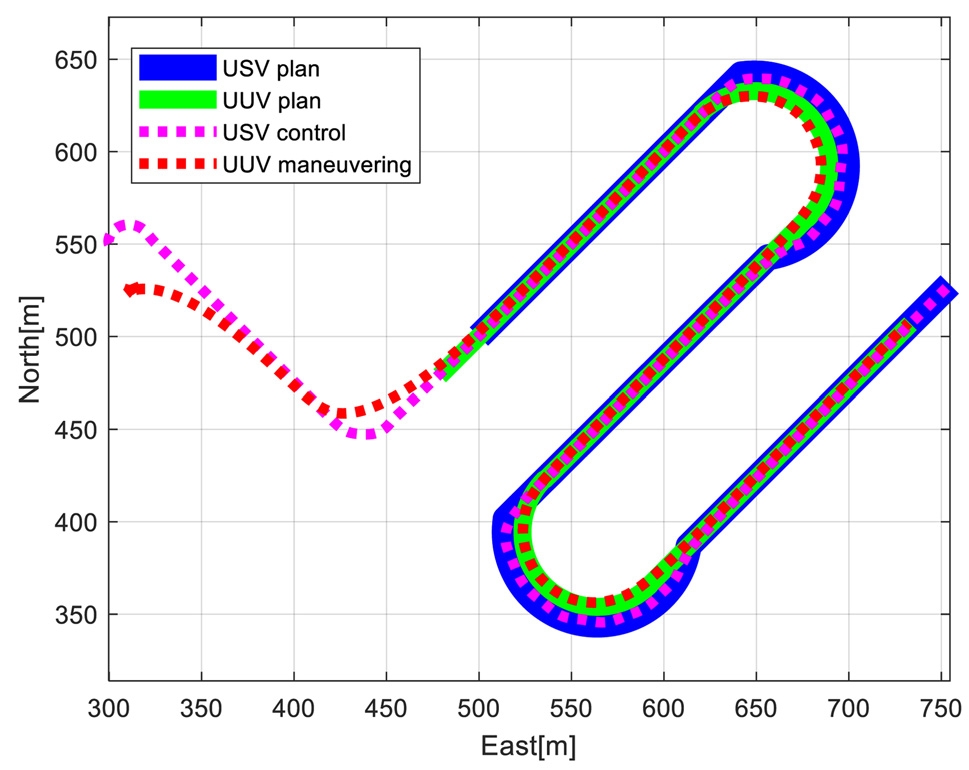
예인형 무인수중정 경로계획 기반 무인수상정 경로 추종 제어를 바탕으로 예인형 무인수중정 운동 결과를 확인하였다.
Figs. 25와
26은 초록색은 예인형 무인수중정 경로계획을, 파란색은 예인형 무인수중정 경로계획에 따른 무인수상정의 경로 계획을 나타낸다. 핑크색 점선은 무인수상정의 경로 추종 제어 결과이며, 빨간색 점선은 무인수상정 경로 추종 제어에 따른 예인형 무인수중정 경로 결과이다.
Figs. 25는 기존의 LOS 방법을 적용한 결과이며, 26은 기존의 LOS 방법과 경로선과 수선 방향인 지향자세(
ψd→)를 결합한 결과이다. 제안한 유도명령기법을 통해 무인수상정과 무인수중정 모두 경로계획에 손실 없이 추종할 수 있음을 확인하였다.
Fig. 25USV and UUV path following using conventional LOS vector method
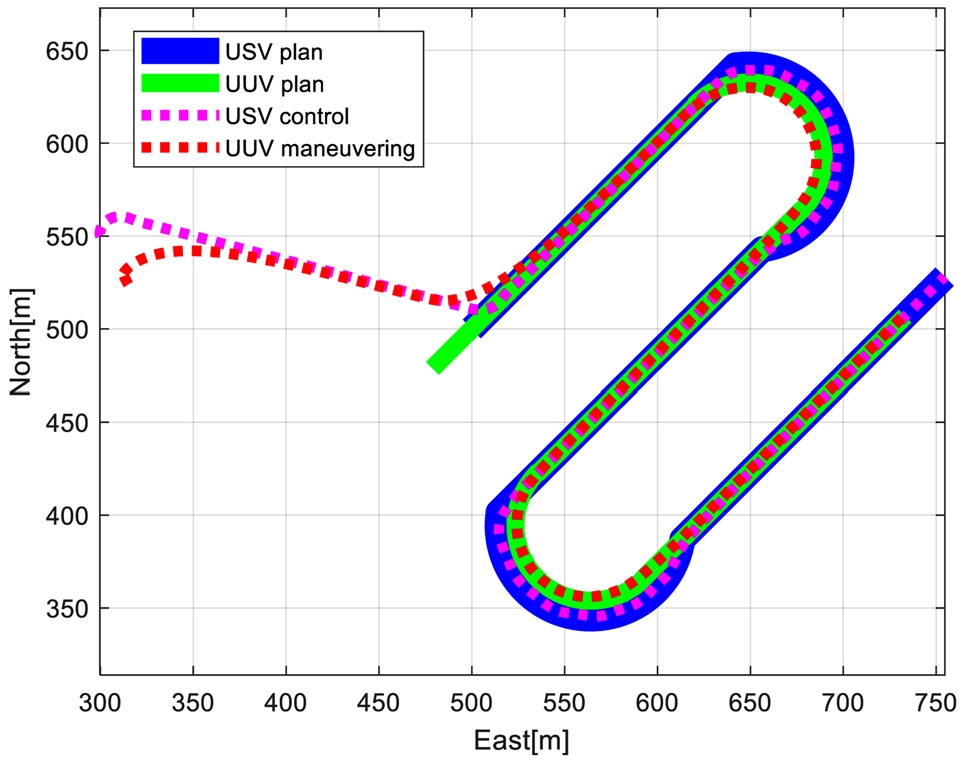
Fig. 26USV and UUV path following using combined method of perpendicular and LOS vector
5. 결론
본 논문은 무인수상정 동력을 도움을 받아 무인수중정의 탐색 범위를 넓힐 수 있도록 기본적이고, 실질적인 무인수상정의 경로추종제어 설계를 제안하였다. 무인수상정의 1차 시스템의 동적 모델 식별 방법을 제안하였으며, 속도에 따라 가변적으로 동적 모델이 적응될 수 있게 설계하였다. 또한 기존의 PID 제어 방법을 활용하고, LOS 유도 명령 보완을 통하여 무인수상정의 경로 추종제어를 설계하였다. 마지막으로 예인형 무인수중정과 무인수상정의 운동 모델 관계를 역이용하여 예인형 무인수중정 경로계획을 기반한 무인수상정의 경로 추종 제어를 설계하였다. 제안된 설계 기법을 통해 무인수상정 및 예인형 무인수중정의 경로 계획대로 추종 및 효율성을 확인하였다.
REFERENCES
- 1.
Manley, J. E., “Unmanned Surface Vehicles, 15 Years of Development,” Oceans, pp. 1-4, 2008.
10.1109/OCEANS.2008.5289429
- 2.
Bertram, V., “Unmanned Surface Vehicles-A Survey,” Skibsteknisk Selskab, Copenhagen, Denmark, Vol. 1, pp. 1-14, 2008.
- 3.
Heo, J., Kim, J., and Kwon, Y., “Technology Development of Unmanned Underwater Vehicles (UUVs),” Journal of Computer and Communications, Vol. 5, No. 7, Paper No. 76166, 2017.
- 4.
Lee, J. E., “Technology Development Trends Analysis and Development Plan of Unmanned Underwater Vehicle,” Journal of the Korea Academia-Industrial Cooperation Society, Vol. 20, No. 9, pp. 233-239, 2019.
- 5.
- 6.
- 7.
- 8.
Fossen, T. I., “Handbook of Marine Craft Hydrodynamics and Motion Control,” John Wiley & Sons, 2011.
10.1002/9781119994138
- 9.
Abkowitz, M. A., “Lectures on Ship Hydrodynamics-Steering and Manoeuvrability,” Proc. of the Transportation Research Board 101st Annual Meeting, Paper No. HY-5, 1964.
- 10.
Norrbin, N. H., “Theory and Observations on the Use of a Mathematical Model for Ship Manoeuvring in Deep and Confined Waters,” Proc. of the Transportation Research Board 101st Annual Meeting, Paper No. SSPA-Pub-68, 1971.
- 11.
Sonnenburg, C. R. and Woolsey, C. A., “Modeling, Identification, and Control of an Unmanned Surface Vehicle,” Journal of Field Robotics, Vol. 30, No. 3, pp. 371-398, 2013.
10.1002/rob.21452
- 12.
Shin, J., Kwak, D. J., and Lee, Y.-I., “Adaptive Path-Following Control for an Unmanned Surface Vessel Using an Identified Dynamic Model,” IEEE/ASME Transactions on Mechatronics, Vol. 22, No. 3, pp. 1143-1153, 2017.
10.1109/TMECH.2017.2651057
- 13.
Nomoto, K., Taguchi, K., Honda, K., and Hirano, S., “On the Steering Qualities of Ships,” Journal of Zosen Kiokai, Vol. 1956, No. 99, pp. 75-82, 1956.
10.2534/jjasnaoe1952.1956.99_75
- 14.
Mishra, P., Panigrahi, S., and Das, S., “Ships Steering Autopilot Design by Nomoto Model,” International Journal on Mechanical Engineering and Robotic, Vol. 3, No. 3, pp. 37-41, 2015.
- 15.
Wi, Y.-U., Kim, H.-H., Ha, Y.-S., and Jin, G.-G., “Backward Path Tracking Control of a Trailer Type Robot Using a RCGS-Based Model,” Journal of Institute of Control, Robotics and Systems, Vol. 7, No. 9, pp. 717-722, 2001.
- 16.
Al-Awad, N. A., “Model Reference Adaptive Control-Based Genetic Algorithm Design for Heading Ship Motion,” Acta Polytechnica, Vol. 60, No. 3, 2020.
10.14311/AP.2020.60.0197
- 17.
Yu, Z., Bao, X., and Nonami, K., “Course Keeping Control of an Autonomous Boat Using Low Cost Sensors,” Journal of System Design and Dynamics, Vol. 2, No. 1, pp. 389-400, 2008.s
10.1299/jsdd.2.389
- 18.
Temiz, I., “An Investigation on the Ship Rudder with Different Control System,” Elektronika ir Elektrotechnika, Vol. 105, No. 9, pp. 28-32, 2010.
- 19.
Fossen, T. I., Breivik, M., and Skjetne, R., “Line-of-Sight Path Following of Underactuated Marine Craft,” IFAC Proceedings Volumes, Vol. 36, No. 21, pp. 211-216, 2003.
10.1016/S1474-6670(17)37809-6
Biography
- Pyung Mo Ku
Research Engineer in LIGNex1. His research interest is GNC M&S of unmanned systems.
- Jae Kwan Ryu
Chief Research Engineer in LIGNex1. His research interest is Unmanned systems (USV, UGV).
- Won Hee Lee
Chief Research Engineer in LIGNex1. His research interest is Unmanned systems (USV, UGV).