ABSTRACT
One of the problems in inverse dynamics calculation for the inertial measurement unit (IMU)-based joint force and torque estimation is the amplified signal noises of segment kinematic data mainly due to the differentiation procedure and segmental soft tissue artifacts. In order to deal with this problem, appropriate filtering methods are often recommended for signal enhancement. Conventionally, a low-pass filter (LPF) is widely used for the kinematic data. However, the zero-phase LPF requires post-processing, while the real-time LPF causes an unignorable time lag. For this reason, it is inappropriate to use the LPF for real-time joint torque estimation. This paper proposes a Kalman filter (KF) for inverse dynamics of IMU-based joint torque estimation in real time without any time lag, while utilizing the smoothing capability of the KF. Experimental results showed that the proposed KF outperformed a real-time LPF in the estimation accuracy of hip joint force and torque during jogging on the spot by 100 and 29%, respectively. Although the proposed KF requires the process of adjusting covariance according to the dynamic conditions, it can be expected to improve the estimation performance in the field where joint force and torque need to be estimated in real time.
-
KEYWORDS: Inertial measurement unit, Inverse dynamics, Kalman filter, Joint torque estimation
-
KEYWORDS: 관성 측정 장치, 역동역학, 칼만 필터, 관절 토크 추정
1. 서론
관절에 작용하는 힘과 토크는 스포츠, 그리고 재활과 같은 분야에서 신체 기능 평가의 중요한 지표로서 사용되고 있다.
1,2 관절의 힘과 토크를 추정하기 위해 가장 널리 사용되는 방법은 광학식 모션캡처시스템(Optical Motion Capture System, OMC)과 포스플레이트(Force Plate)를 사용하여 역동역학을 통해 추정하는 방법이다.
3-7 여기서 OMC는 관절의 힘 및 토크 추정에 필요한 분절의 각속도, 질량 중심 가속도, 그리고 분절의 자세와 같은 신체 분절의 운동학적(Kinematics) 물리량을 측정하며, 포스플레이트는 지면 반력과 모멘트(Ground Reaction Force & Moment, GRF & M), 그리고 압력 중심(Center of Pressure)과 같은 운동역학적(Kinetics) 물리량을 측정한다.
8
운동학적 물리량을 제공하는 OMC의 경우 고정된 위치에 설치되는 카메라에 의해 포착 가능한 공간에서만 작동한다. 즉, 공간의 제약성이라는 근본적 한계점을 가지고 있다. 또한 마커의 가림현상 역시 OMC 운용의 어려움 중 하나이다. 기존 OMC의 한계점을 극복하기 위해 3축 가속도계, 3축 자이로스코프 그리고 3축 지자기센서로 이루어진 9축 소형 관성 측정 장치(Inertial Measurement Unit, IMU)가 활용될 수 있다. IMU는 웨어러블 센서로서 신체 분절에 부착되어 해당 분절의 운동학적 물리량을 공간의 제약없이 실시간으로 추정할 수 있기 때문이다. 따라서, IMU와 포스플레이트를 함께 사용하여 역동역학을 통해 관절에 작용하는 힘과 토크를 추정하는 연구가 진행되고 있다.
9-13
역동역학은 분절의 관성 매개변수(Inertial Parameter), 운동학적 물리량, 그리고 신체에 작용하는 외부 힘을 사용하여 관절의 힘 및 토크를 추정하기 위해 사용되는 가장 일반적인 방법이다. 이때, 역동역학 계산에서 발생하는 문제 중 하나는 수치 미분 절차와 분절의 연조직 변형으로 인해 분절 운동학적 데이터의 잡음 성분이 증폭되는 것이다. IMU 시스템의 경우 IMU가 부착된 분절의 피부 그리고 지방과 같은 연조직의 흔들림과 변형으로 인해 운동학 데이터에 실제 분절의 움직임에 의한 신호가 아닌 잡음 성분이 크게 증가한다.
14
이와 같은 문제를 다루기 위해 분절 운동학 데이터 신호에 적절한 필터링의 적용이 권장된다.
15-17 신호 강화를 위해 가장 보편적으로 사용되는 필터 중 하나는 영위상차(Zero-Phase) 저주파 통과 필터(Low-Pass Filter, LPF)이다. LPF는 특정 차단 주파수 이하의 신호는 통과시키고 차단 주파수 이상의 신호는 감쇠시켜, 잡음 성분인 고주파 성분을 제거하고, 이를 통해 신호를 부드럽게 만든다. 이때 영위상차의 적용은 입력 데이터를 순방향과 역방향으로 모두 처리하여 시간의 지연을 발생시키지 않는다. 하지만 영위상차 LPF는 데이터를 모두 습득한 후 처리해야하는 후처리 과정이 필요하다. 따라서, 실시간으로 물리량을 추정하지 못한다는 단점을 가지고 있다. 반면, 실시간 LPF는 실시간으로 운동학 데이터를 추정할 수 있지만, 시간 지연(Time Lag)이 발생한다. 이로 인해 운동학 데이터는 실시간으로 추정된 다른 물리량들과 동기화(Synchronization)되지 않아 신체 관절의 실시간 역학분석에 오차를 야기시킨다. 이와 같은 문제들로 관절에 작용하는 힘과 토크를 실시간으로 추정할 경우 LPF를 적용한 분절의 운동학 데이터를 사용하기에는 부적절하다.
칼만 필터(Kalman Filter)는 공분산을 통해 칼만 필터의 필터링 기능을 활용하면서 시간 지연 없이 물리량을 추정할 수 있다는 장점을 가지고 있다. 본 논문은 IMU 기반 실시간 관절 힘 및 토크 추정을 위해 LPF를 대신하여, 역동역학에 필요한 분절의 운동학적 물리량을 시간 지연 없이 실시간으로 필터링하면서 데이터의 잡음 성분을 제거할 수 있는 칼만 필터를 제안한다. 다양한 동적 수준의 동작에서 제안 칼만 필터의 성능을 검증하기 위해 운동학적 데이터를 LPF로 필터링한 방법, 그리고 필터링 하지 않은 방법으로 관절 힘과 토크를 추정한 성능과 비교 분석하였다.
2. 방법
2.1 관절 힘 및 토크 추정 역동역학
다음 Newton-Euler 역동역학 식을 통해 관절의 힘과 토크를 몸의 중심부에서 먼 윈위부(Distal) 분절에서부터 몸의 중심부와 상대적으로 가까운 근위부(Proximal) 분절로 전파시키며 추정한다.
8 I 분절의 근위부 관절에 작용하는 힘과 토크를 구하는 역동역학 식은 각각 다음
식(1)과
식(2)와 같다.
여기서, FP,i와 FD,i는 각각 i 분절의 근위부 관절과 원위부 관절에 작용하는 힘, mi는 질량, aC,i는 질량 중심 가속도, g는 중력 가속도이며, τP,i과 τD,i는 각각 원위부 그리고 근위부 관절에 작용하는 토크, ω˙i와 ωi는 각각 각가속도와 각속도, JC,i는 분절 질량 중심의 관성텐서, 그리고 rP,i와 rD,i는 각각 질량 중심에서 원위부와 근위부 관절까지의 위치벡터이다.
관절 힘과 토크를 구하기 위해 역동역학에서 필요한 분절의 운동학적 물리량은 분절 질량 중심의 가속도, 각속도, 그리고 각 가속도이다. 신체 각 분절이 강체이며, 분절
i좌표계와 센서좌표계가 일치한다는 가정으로 분절
i의 각속도와 각가속도 그리고 질량 중심의 가속도는 분절에 부착된 센서의 각속도
ωS, 각가속도
ω˙S, 그리고 외부가속도
aS를 통해 다음
식(3)부터
식(5)와 같이 결정된다.
여기서 rC는 센서에서 분절의 질량 중심까지의 위치벡터로 상수로 결정되며, [ωS×]는 ωS 벡터의 외적(Cross Product)행렬을 나타낸다.
2.2 실시간 분절 물리량 추정 칼만 필터
신체 분절 운동학 데이터의 필터링을 위해, 센서 신호 모델과 운동학 모델을 통해 칼만 필터를 구성한다. IMU 센서의 가속도계(
A)와 자이로스코프(
G) 그리고 자이로스코프 미분 신호는 각각 다음
식(6)부터
식(8)과 같이 모델링된다.
18
여기서 위첨자
S는 해당 벡터가 센서좌표계 {
S}에서 표현되었음을 의미하며,
n은 각 센서 신호의 잡음 성분이다. 가속도계 신호에 포함되는 중력가속도
Sg는
gSZ으로 다시 표현할 수 있다. 여기서
g는 중력 가속도 크기(즉, 9.8 m/s
2), 그리고
SZ는 센서좌표계에서 바라본 관성좌표계 {
I}의 Z축 단위벡터로, 센서 자세 추정 알고리즘을 통해 추정된다.
19,20 이때
Z^S는 추정 오차
εZ를 포함하고 있으므로, 가속도계 신호 모델
식(6)은 다음
식(9)와 같이 정리된다.
센서의 외부 가속도, 각속도, 그리고 각가속도는 각각 다음
식(10)부터
식(12)와 같이 모델링된다.
여기서 Δt는 샘플링 시간이며, ε는 각 모델의 현재 시간스텝과 이전 시간스텝 사이의 오차이다.
이산 시간
t에 대한 칼만 필터의 진행 모델과 측정 모델 식은 각각 다음
식(13)과
식(14)와 같다.
21
여기서
x는 상태벡터,
Φ는 상태 천이행렬,
w는 공분산
Q를 갖는 진행 모델의 잡음,
z는 측정벡터,
H는 관측행렬 그리고
v는 공분산
M을 갖는 측정 모델의 잡음이다. 제안 칼만 필터의 진행 모델은
식(10)부터
식(12)를 통해 다음
식(15)부터
식(17)과 같이 구성된다.
제안된 칼만 필터의 진행 모델 공분산행렬
Q와 측정 모델 공분산행렬
M은 다음
식(21)과
식(22)와 같이 구성된다.
여기서
Σa,
Σω 그리고
Σdω는 각각 센서 가속도, 각속도 그리고 각가속도 진행 모델 오차의 공분산이며,
σA,
σG, 그리고
σdG는 각각
nA,
nG 그리고
ndG의 표준편차, 그리고
ΣZ는 센서 Z축 단위벡터 추정 오차
εZ의 공분산이다. 칼만 필터는 공분산을 통해 진행 모델과 측정 모델의 가중치를 설정한다.
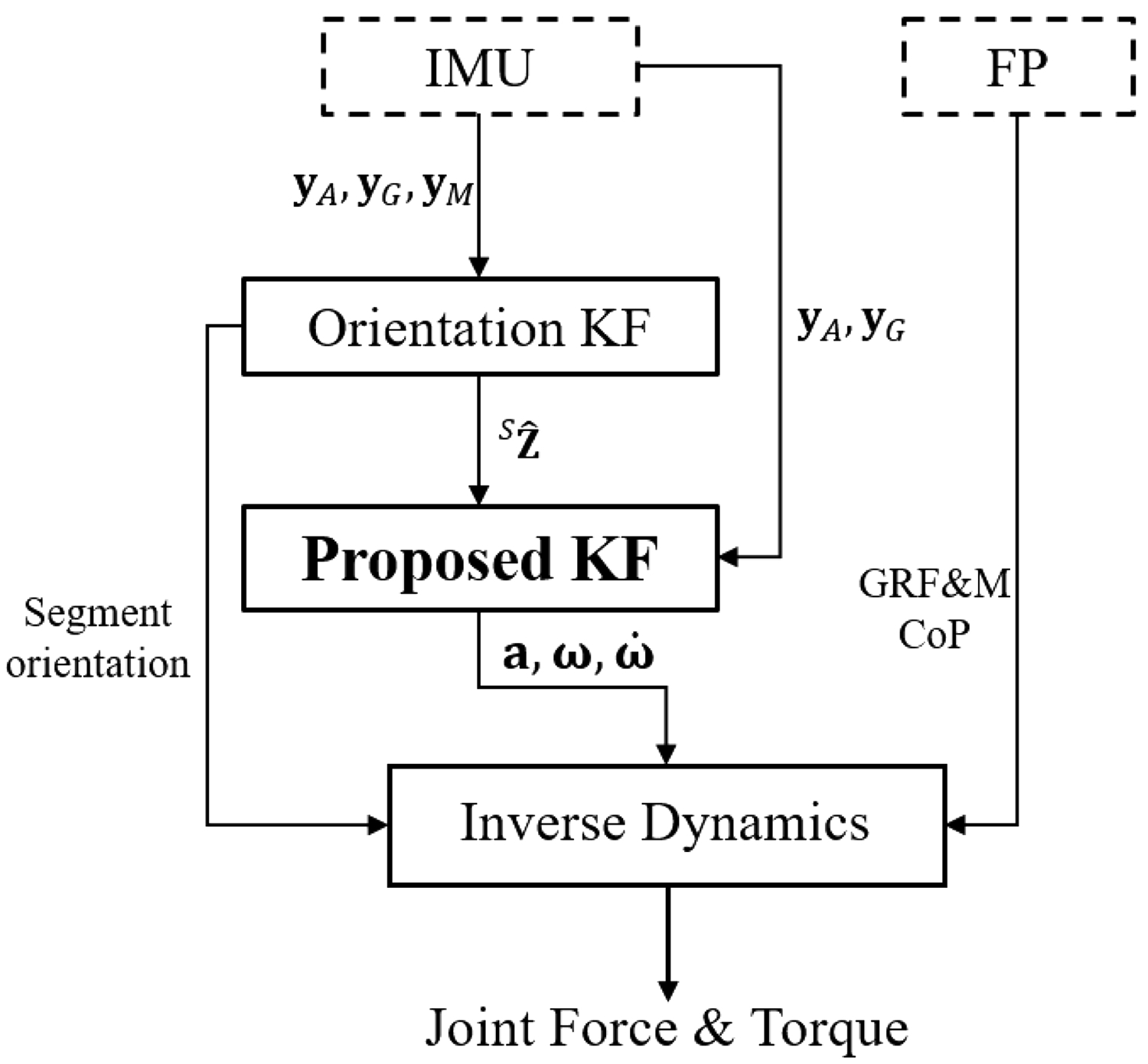
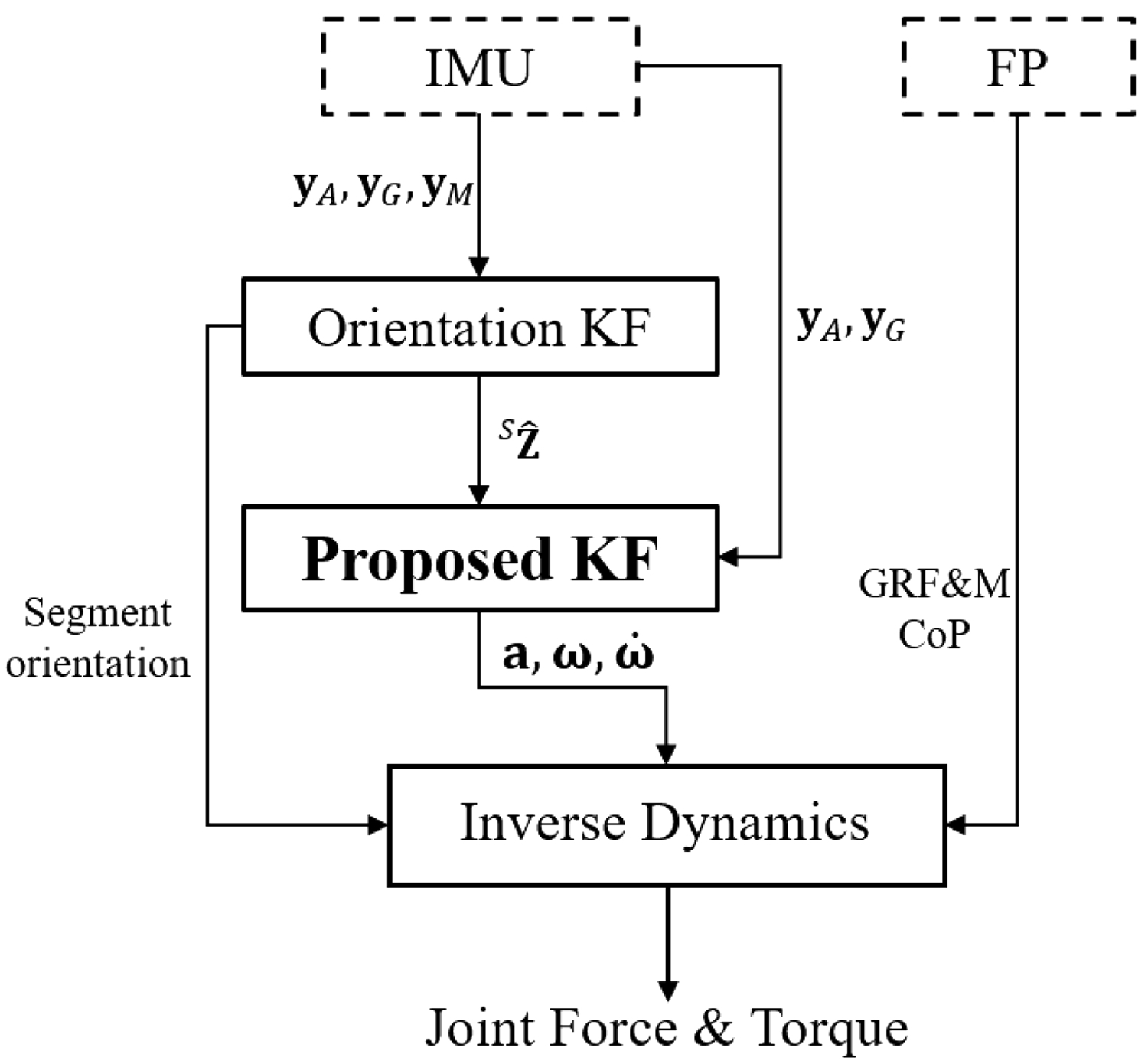
Fig. 1은 관절의 힘과 토크 추정에 대한 역동역학 절차이다. 여기서,
yA,
yG 그리고
yM은 IMU 신호로 각각 가속도계, 자이로스코프, 그리고 마그네토미터 신호를 의미한다.
Fig. 1Structure of IMU-based joint force & torque estimation
3. 검증 실험
제안 칼만 필터의 성능 검증을 위해서 건강한 성인 남성 3명(25±2세, 74±6.5 kg, 175±2.6 cm)을 대상으로 검증 실험을 진행하였다.
IMU와 포스플레이트를 사용하여 오른쪽 하지 관절(발목, 무릎, 그리고 고관절)에 작용하는 힘과 토크를 실시간으로 추정하였다. 이때 IMU는 MTw (Xsens Technologies B. V., Netherlands)가, 포스플레이트는 OR6-7 (Advanced Mechanical Technology, Inc., USA)이 사용되었다. Mtw의 상세 제원은
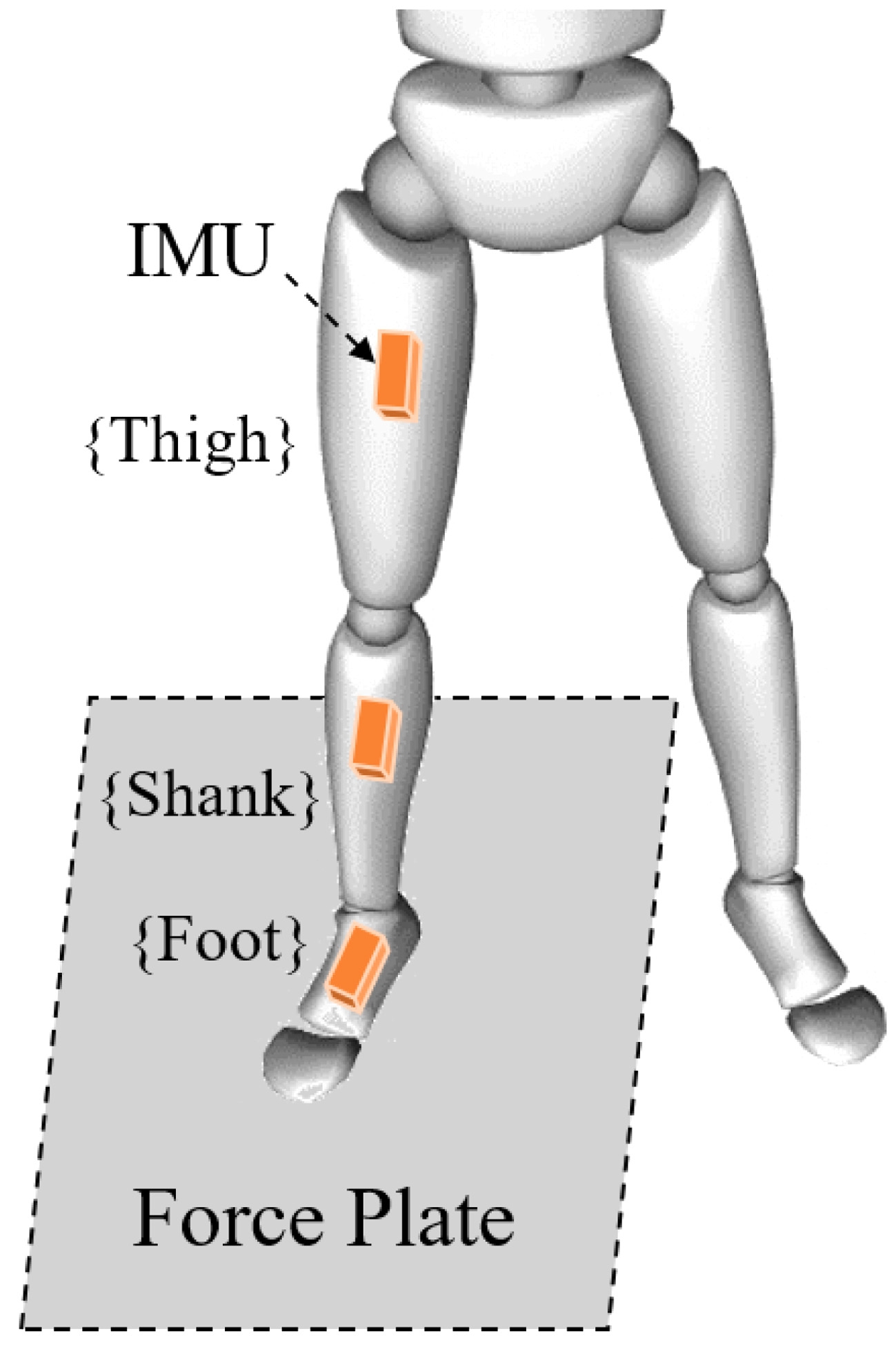
Table 1을 참조한다. 또한, 참조값을 얻기 위한 OMC로는 Optitrack Flex 13 (Natural Point, USA)이 사용되었다. 측정 주기는 모두 100 Hz로 설정되었다. IMU 시스템의 경우, 오른쪽 하지 분절의 운동학 데이터와 관절의 힘과 토크를 실시간으로 추정하기 위해 총 3개의 IMU 센서를 각각 발, 종아리, 그리고 허벅지에 부착하였다(
Fig. 2 참조). 또한, 센서에서 분절 질량 중심까지의 위치벡터와 센서에서 각 관절까지의 위치벡터는 OMC를 통해 사전에 상수로 결정하였다. 포스플레이트는 오른쪽 하지 부분에 위치시켜 오른발에 작용하는 지면 반력과 모멘트, 그리고 압력 중심을 측정하였다. 포스플레이트의 압력 중심에서 발 분절의 질량 중심까지의 위치벡터 오차로 인한 관절 힘 및 토크 추정 오차를 제거하기 위해 발에 부착한 IMU의 위치는 OMC를 활용하여 실시간으로 결정하였다.
Table 1 Specification of MTw
Table 1
|
Accelerometer |
Gyroscope |
Magnetometer |
|
Range |
±160 m/s2
|
±2,000 deg/s |
±1.9 gauss |
|
Noise |
200 μg/Hz
|
0.01 deg/s/Hz
|
0.2 mgauss/Hz
|
Fig. 2 Experimental setup

검증 실험은 움직임의 동적 수준에 따라 세 가지로 나누었으며, 세 가지 실험의 동작과 실험 시간, 그리고 각 분절에 부착한 센서 외부 가속도 노름의 평균은 다음과 같다.
(1) Test 1: 1분 30초간 스쿼트 (평균 ∥aS∥2: 2.31 m/s2)
(2) Test 2: 1분간 제자리 걸음 (평균 ∥aS∥2: 6.71 m/s2)
(3) Test 3: 1분간 제자리 뛰기 (평균 ∥aS∥2: 22.1 m/s2)
Test 1은 실험 대상자의 무릎 각도가 90° 이상이 되도록 상대적으로 느린 속도로, Test 2는 약 1초당 2회 발구름 속도로, 마지막으로 Test 3은 가볍게 뛰는 수준의 상대적으로 빠른 속도로 실험을 진행하였다. 실험은 피실험자마다 Test별로 5번씩 시행하였다.
영위상차 4차 버터워스(Butterworth) LPF(차단주파수: 6 Hz)를 적용시킨 IMU 신호를 활용하여 구한 분절의 운동학적 물리량, 그리고 OMC를 통해 측정한 센서의 자세 및 분절의 자세를 활용하여 관절 힘 및 토크의 참조값을 구하였다.
제안 방법의 성능을 비교 검증하기 위해, 다음 세 방법으로 필터링한 신체 분절의 운동학적 물리량을 기반으로 관절 토크와 힘을 실시간으로 추정하였다.
(1) M1: 제안 칼만 필터를 통과시킨 IMU 신호 기반 운동학적 물리량
(2) M2: 실시간4차 버터워스 LPF(차단주파수: 6 Hz)를 통과시킨 IMU 신호 기반 운동학적 물리량
(3) M3: IMU의 원신호(Raw Signal)를 활용하여 추정한 분절의 운동학적 물리량
세 방법 모두 자세 정보는 Lee의 센서 자세 추정 칼만 필터
18를 활용하여 실시간으로 추정하였다.
제안 칼만 필터의 진행 모델 공분산 Σa, Σω 그리고 Σdω 각각 9×10-6I3×3, 1.2×10-7I3×3 그리고 1.9×10-5I3×3으로 설정하였으며, 측정 모델의 공분산 σA2I3×3, σG2I3×3, σdG2I3×3 그리고 ΣZ은 각각 2.2×10-4I3 × 3, 2.3×10-6I3 × 3, 6.4×10-4I3 × 3 그리고 1.3×10-4I3×3으로 설정하였다.
OMC 기반 신체 분절의 물리량은 다음과 같이 결정하였다. 고관절의 위치는 Davis et al.의 회귀법
22을 통해 결정하였다. 또한 분절의 자세는 국제생체역학회 ISB의 권장사항
23에 따라 구하였으며, 관성 매개변수인 분절 질량 중심의 관성 텐서
JC, 분절의 질량
m, 그리고 질량 중심에서 각 관절까지의 위치 상수벡터
rP,
rD는 Dumas et al.의 회귀법
24을 활용하여 결정하였다.
4. 결과 및 고찰
Table 2는 각 관절에 작용하는 축별(Anterior-Posterior, Superior-Inferior, Medial-Lateral) 힘과 토크 추정에 대한 평균제곱근오차(Root Mean Squared Error, RMSE) 결과이다. RMSE 결과는 3명의 피실험자가 수행한 모든 Test의 평균±표준편차이다. 스쿼트 동작인 Test 1에서 제안 칼만 필터를 사용한 M1의 성능이 우수하긴 하였지만, Test 1과 같은 느린 움직임에서는 분절의 연조직 변형과 LPF의 시간 지연으로 인한 오차가 적기 때문에 세 방법 모두 대체로 양호한 추정 성능을 보였다. 제자리 걸음 실험인 Test 2에서, M2의 관절 힘과 토크 추정 평균 RMSE는 각각 7.25 N과 3.41 Nm이며, M3의 평균 RMSE는 각각 5.47 N과 3.35 Nm이었다. 그에 비해 M1의 관절 힘 및 토크 추정 평균 RMSE는 각각 3.62 N과 3.14 Nm으로 두 방법보다 우세한 추정 성능을 보였다. 제자리 뛰기 실험인 Test 3에서는 동적 수준이 높아짐에 따라 상대적으로 큰 오차를 보였다. 특히, 가장 근위부 관절인 고관절의 경우 원위부 관절들의 오차가 누적되어 오차가 컸다. M2의 관절 힘과 토크 추정 평균 RMSE는 각각 27.3 N과 9.57 Nm이며, M3의 경우는 각각 27.1 N과 9.88 Nm이었다. 반면, 제안 칼만 필터를 사용하는 M1의 경우는 각각 13.6 N과 8.27 Nm로 우세한 추정 성능을 보였다. 이와 같이, 움직임의 동적 수준이 높아질수록 제안 칼만 필터를 사용함으로 인한 오차 감소 효과가 증가하였다.
Table 2
RMSE results of the joint force and torque estimation
(a) Joint force [N]
Table
|
|
Test 1 |
Test 2 |
Test 3 |
|
AP*
|
SI*
|
ML*
|
AP |
SI |
ML |
AP |
SI |
ML |
|
M1 |
Ankle |
0.15±0.0 |
0.11±0.0 |
0.26±0.1 |
1.37±0.3 |
1.20±0.6 |
0.83±0.1 |
3.89±0.3 |
2.88±0.1 |
2.34±0.1 |
|
Knee |
0.92±0.3 |
0.73±0.1 |
0.94±0.1 |
2.67±0.4 |
3.13±0.5 |
2.15±0.3 |
11.9±0.7 |
8.24±0.4 |
7.15±0.5 |
|
Hip |
3.11±1.1 |
3.93±0.1 |
4.08±0.8 |
4.76±0.6 |
9.83±0.6 |
6.68±1.3 |
25.2±1.5 |
38.6±2.8 |
22.2±1.2 |
|
M2 |
Ankle |
0.18±0.0 |
0.11±0.0 |
0.29±0.1 |
1.83±0.3 |
2.09±0.5 |
1.15±0.1 |
4.33±0.2 |
4.58±0.2 |
2.89±0.1 |
|
Knee |
1.62±0.2 |
0.93±0.1 |
1.50±0.1 |
5.34±0.5 |
6.68±0.5 |
3.23±0.3 |
25.6±1.2 |
17.4±1.0 |
8.31±0.4 |
|
Hip |
5.18±0.8 |
8.04±0.5 |
5.79±0.6 |
12.±01.1 |
22.7±1.4 |
10.2±1.2 |
62.4±2.6 |
91.8±6.5 |
28.1±0.9 |
|
M3 |
Ankle |
0.28±0.0 |
0.26±0.0 |
0.37±0.1 |
2.87±0.4 |
2.45±0.7 |
2.00±0.2 |
13.3±1.4 |
9.34±0.5 |
7.06±0.4 |
|
Knee |
1.40±0.2 |
1.03±0.1 |
1.22±0.1 |
4.78±0.4 |
3.65±0.6 |
3.21±0.3 |
22.0±1.8 |
18.3±1.4 |
16.0±1.2 |
|
Hip |
5.20±0.8 |
5.84±0.2 |
5.68±0.6 |
8.48±0.6 |
11.0±0.5 |
10.8±1.1 |
48.1±4.0 |
56.4±4.8 |
53.4±4.9 |
(b) Joint torque [Nm]
Table
|
|
Test 1 |
Test 2 |
Test 3 |
|
AP |
SI |
ML |
AP |
SI |
ML |
AP |
SI |
ML |
|
M1 |
Ankle |
1.42±0.2 |
0.11±0.0 |
1.93±0.3 |
2.04±0.6 |
0.31±0.2 |
3.12±2.0 |
3.05±0.6 |
0.50±0.0 |
3.00±0.3 |
|
Knee |
4.22±1.3 |
0.97±0.2 |
10.5±0.9 |
3.50±2.6 |
0.39±0.1 |
3.94±2.0 |
10.8±4.8 |
1.54±0.3 |
18.54±.8 |
|
Hip |
7.63±1.2 |
1.14±0.4 |
7.85±2.7 |
7.30±5.0 |
0.74±0.2 |
6.96±2.7 |
13.4±5.9 |
2.25±0.3 |
21.4±5.3 |
|
M2 |
Ankle |
1.42±0.2 |
0.11±0.0 |
1.93±0.3 |
2.04±0.6 |
0.35±0.2 |
3.13±2.0 |
3.05±0.7 |
0.53±0.0 |
3.05±0.3 |
|
Knee |
4.24±1.3 |
0.98±0.2 |
10.5±0.9 |
3.56±2.6 |
0.54±0.1 |
4.09±2.0 |
11.1±4.7 |
1.73±0.3 |
18.8±4.7 |
|
Hip |
7.72±1.2 |
1.33±0.4 |
7.99±2.6 |
7.74±4.9 |
0.93±0.2 |
8.27±2.4 |
14.8±5.4 |
3.18±0.3 |
29.9±4.4 |
|
M3 |
Ankle |
1.43±0.2 |
0.12±0.0 |
1.93±0.3 |
2.05±0.6 |
0.46±0.2 |
3.12±2.0 |
3.25±0.6 |
1.34±0.1 |
3.03±0.3 |
|
Knee |
4.24±1.3 |
0.98±0.2 |
10.5±0.9 |
3.59±2.6 |
0.62±0.1 |
4.22±20. |
11.5±4.6 |
2.74±0.2 |
19.8±4.7 |
|
Hip |
7.66±1.2 |
1.19±0.4 |
7.93±2.7 |
7.74±4.9 |
0.93±0.2 |
7.44±2.6 |
18.5±4.5 |
3.09±0.3 |
25.7±5.1 |
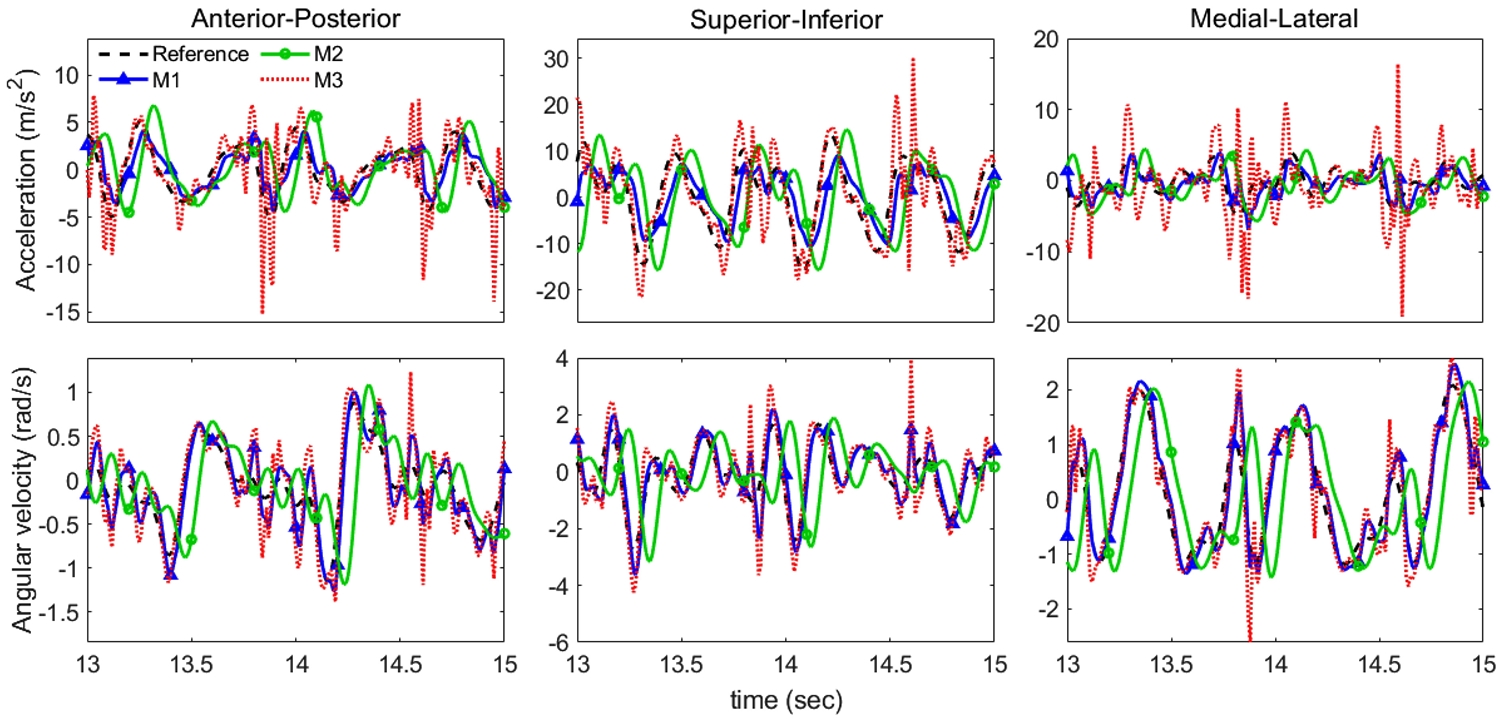
Fig. 3은 한 실험 대상자의 허벅지 분절의 질량 중심 가속도 그리고 각속도 데이터의 일부를 발췌한 그래프이다. 실시간 LPF를 사용하는 M2의 경우 데이터의 시간 지연이 약 0.1초 발생하였다. 원신호를 사용하는 M3의 경우, 제자리 걸음과 제자리뛰기와 같은 동작에서 발이 지면에 착지하는 순간(즉,
Fig. 3의 약 13.8초 지점) IMU가 부착된 분절의 연조직 변형으로 인해 운동학적 물리량의 잡음이 증가하는 것이 관측됐다. 그에 비해 제안 칼만 필터는 시간의 지연이 발생하지 않는 동시에 잡음성분을 제거하며 참조값을 잘 추정하였다.
Fig. 3 Comparison of accelerations and angular velocities of thigh in Test 3
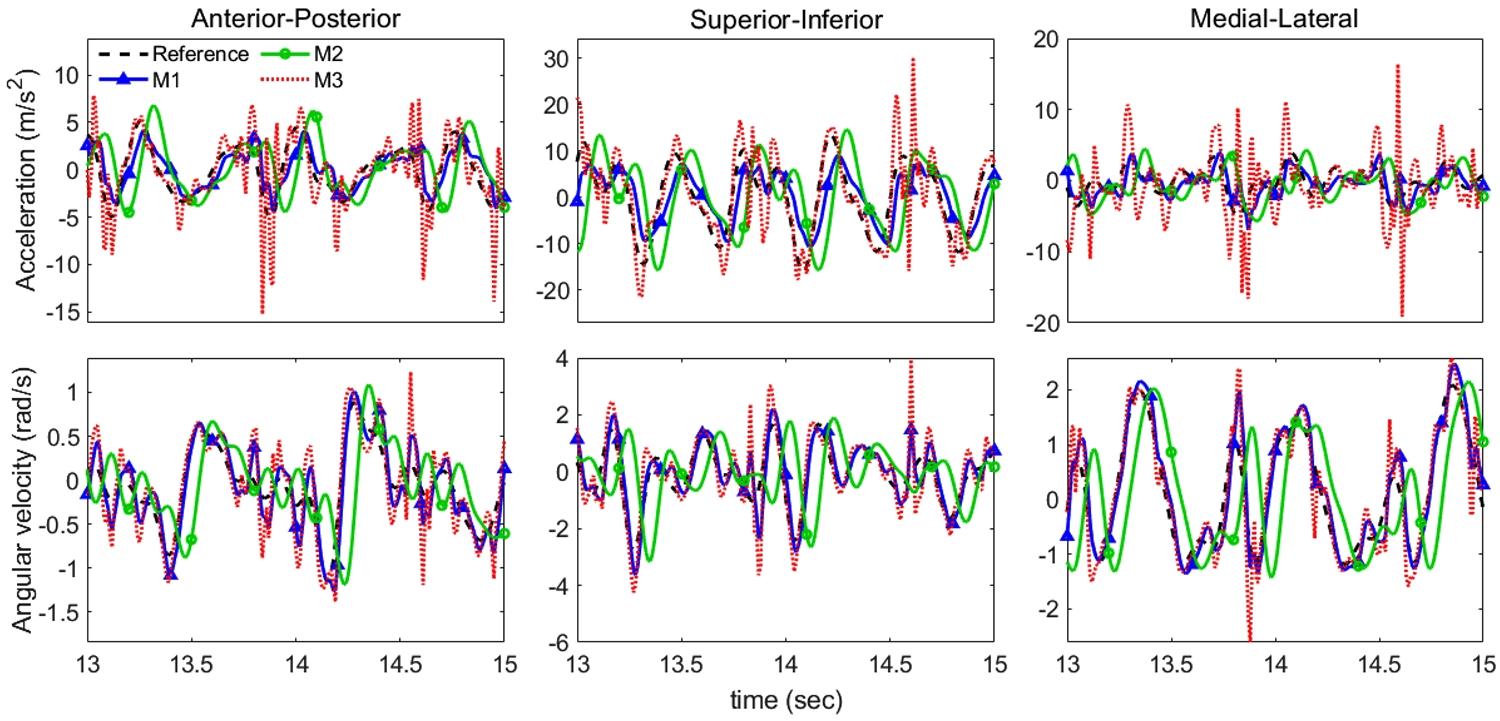
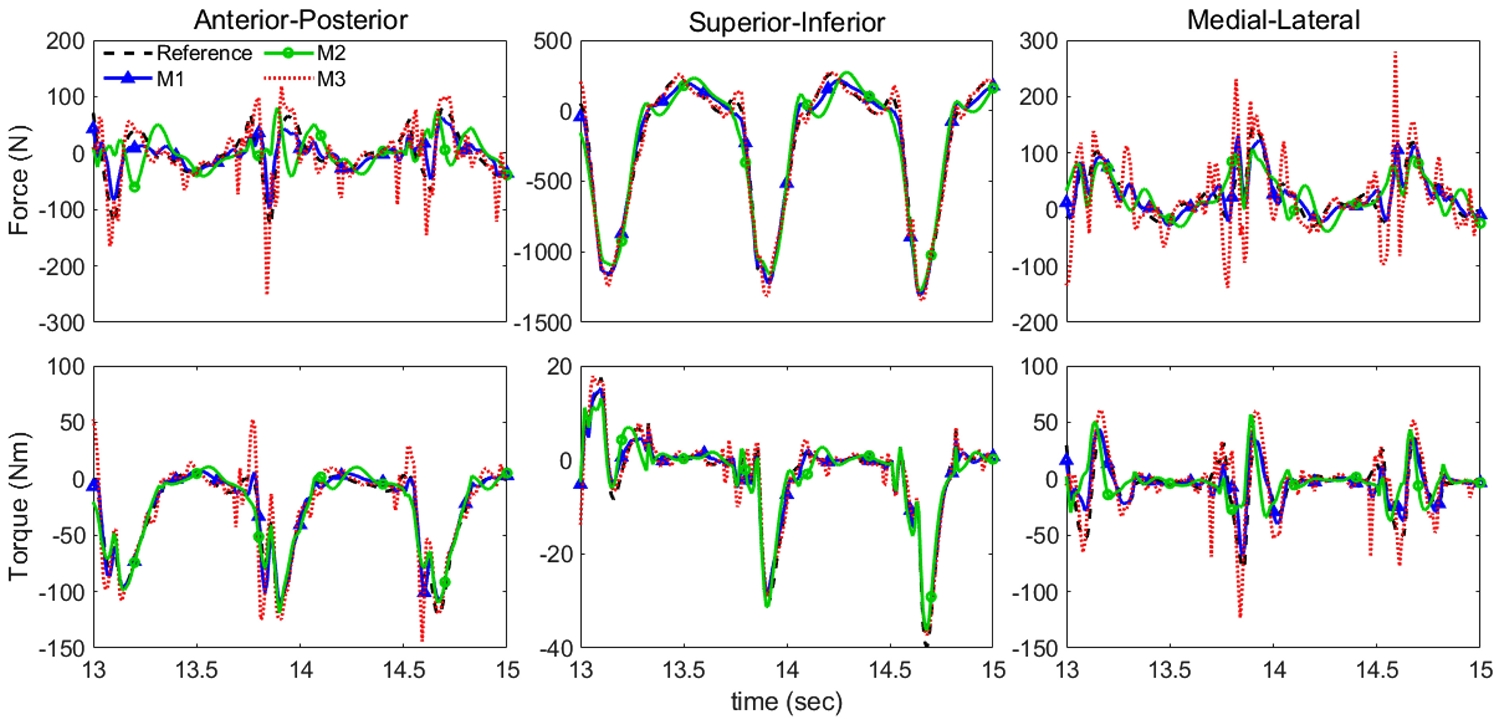
Fig. 4는 Test 3에서 동일 실험 대상자의 허벅지 운동학 데이터를 통해 계산되는 고관절에 작용하는 힘과 토크의 추정 결과 중 일부를 발췌한 그래프이며,
Table 3은 각 방법에 따라 추정된 고관절 힘 및 토크와 참조값과의 상관계수(Correlation Coefficient, Pearson’s r) 결과(평균±표준편차)이다. M1의 힘 및 토크 평균 상관계수는 0.96 그리고 0.93으로, 분절의 운동학 데이터를 잘 추정하므로써 힘과 토크의 추정에서도 높은 정확도를 보였다. 반면, M2의 힘 및 토크 평균 상관계수는 0.88 그리고 0.90이며, M3의 경우 각각 0.87 그리고 0.91이다. 두 방법은 각각 분절 운동학 데이터의 시간 지연과 잡음 성분으로 인한 오차로 실시간 추정 성능이 크게 저하되었다. 특히, M2의 고관절 힘 추정 평균 상관계수는 0.68(AP축의 경우 0.36)이며, 토크 추정 평균 상관계수는 0.75(ML축의 경우 0.35)로 세 방법 중 가장 상이한 것을 확인하였다.
Fig. 4 Result of hip joint force and torque estimation in test 3
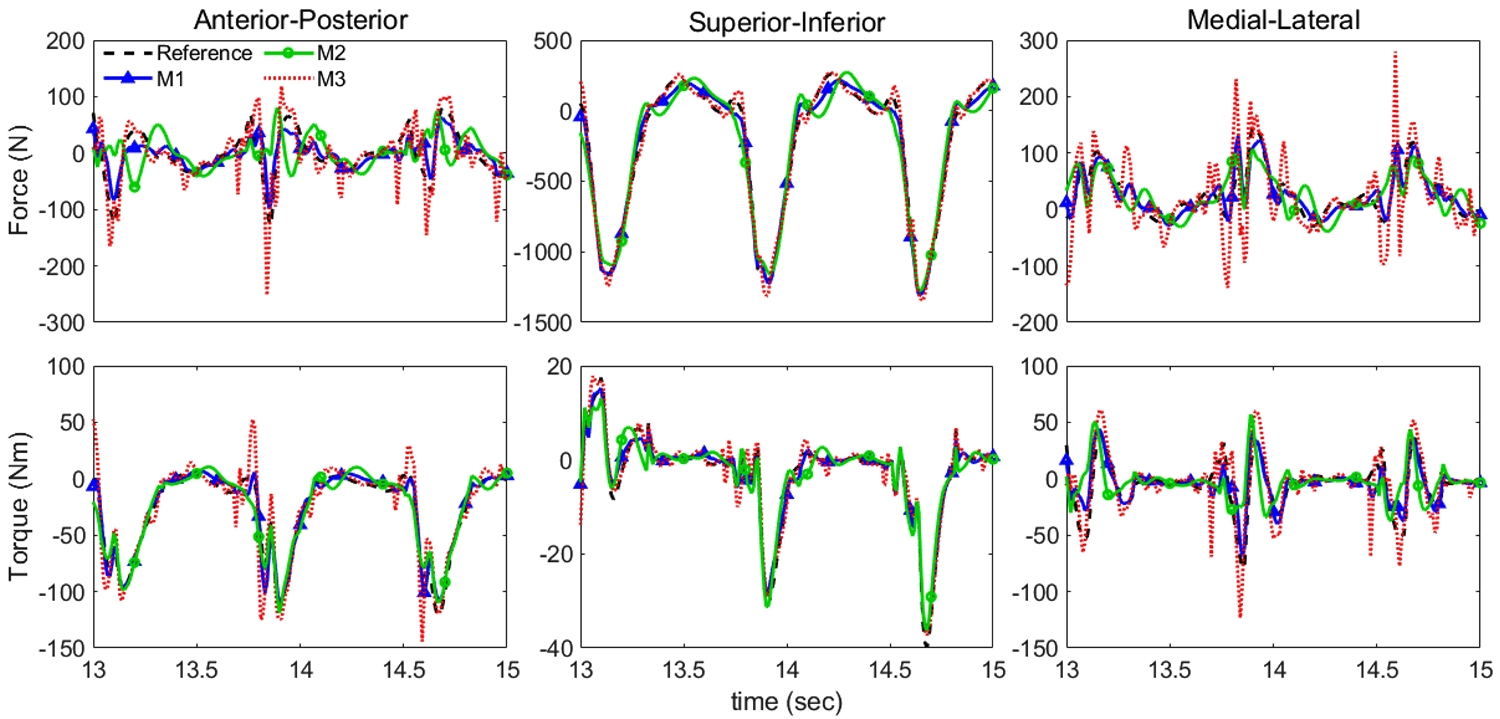
Table 3
Correlation coefficient of joint force and torque in test 3
(a) Joint force
Table
|
Ankle |
Knee |
Hip |
|
M1 |
0.99±0.00 |
0.98±0.00 |
0.90±0.02 |
|
M2 |
0.99±0.00 |
0.98±0.00 |
0.68±0.03 |
|
M3 |
0.94±0.01 |
0.91±0.02 |
0.75±0.05 |
(b) Joint torque
Table
|
Ankle |
Knee |
Hip |
|
M1 |
0.99±0.00 |
0.95±0.04 |
0.85±0.05 |
|
M2 |
0.99±0.00 |
0.95±0.04 |
0.75±0.02 |
|
M3 |
0.98±0.01 |
0.93±0.04 |
0.82±0.04 |
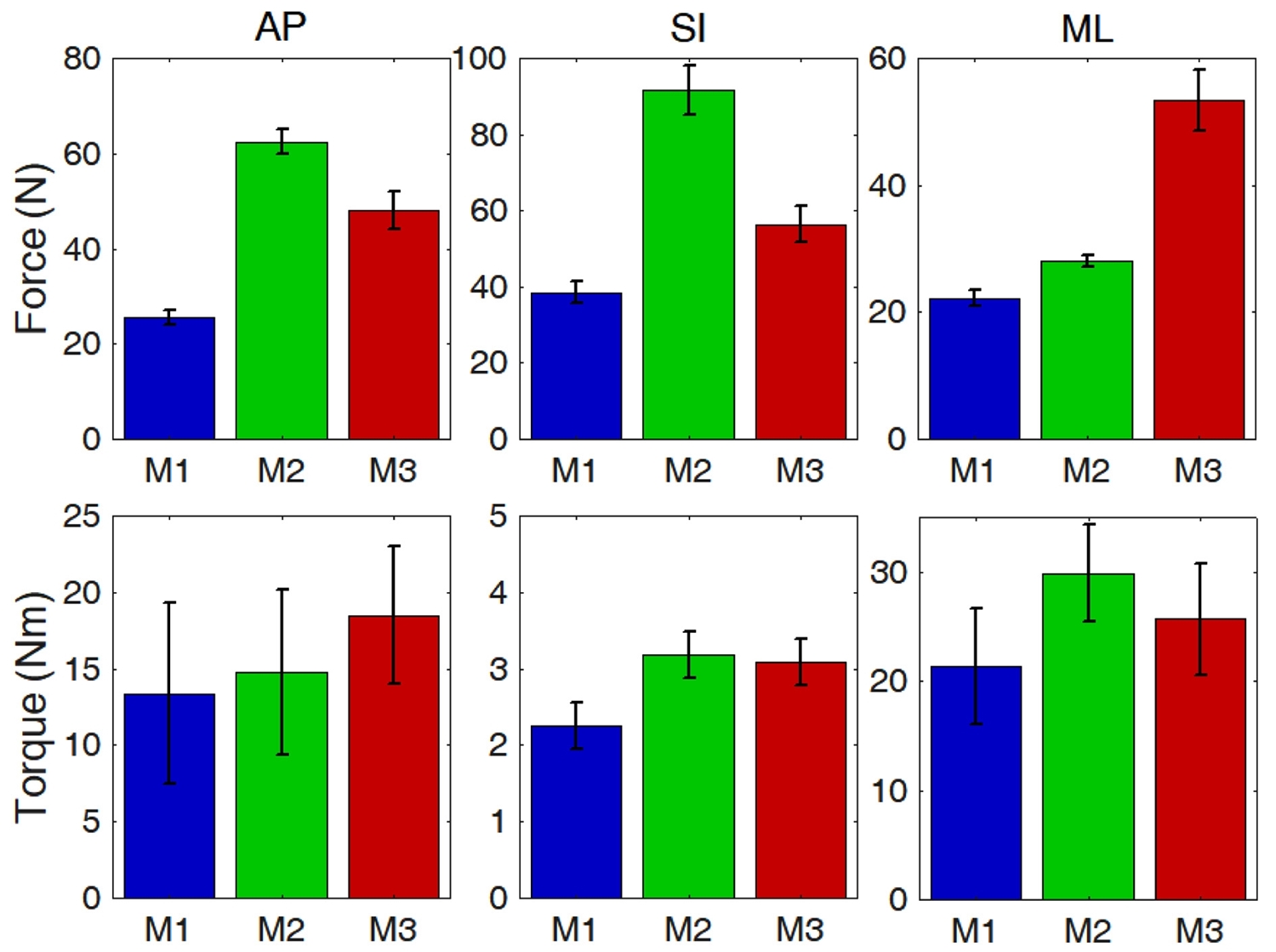
Table 4는 Test 3에서 추정 오차가 가장 큰 허벅지의 운동학 데이터 RMSE 결과(평균±표준편차)이며
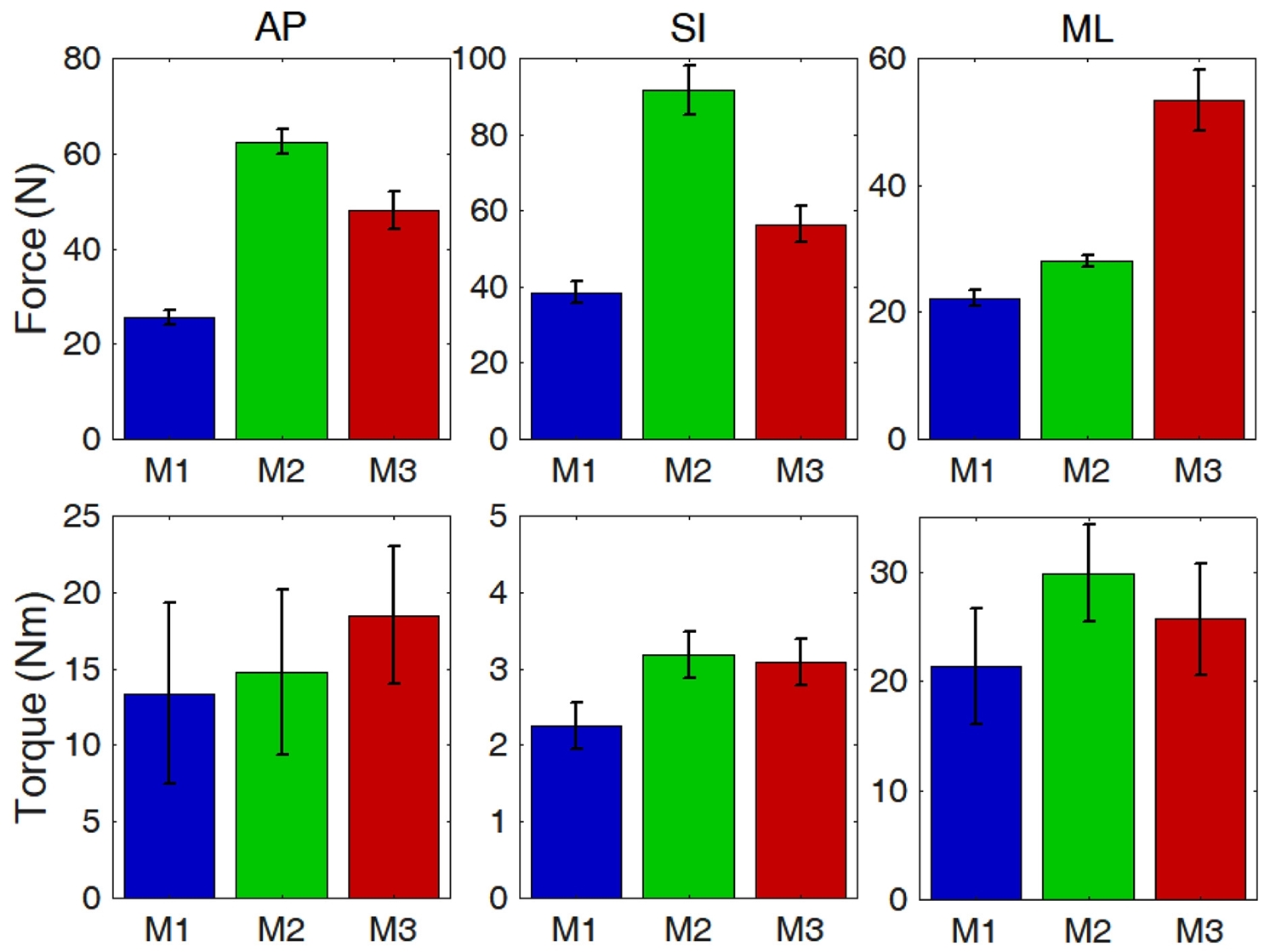
Fig. 5는 허벅지 운동학 데이터로 추정되는 고관절의 축별 힘과 토크 추정 평균 RMSE 그래프이다.
Fig. 5의 오차 막대는 표준편차를 나타낸다. 제안 칼만 필터를 사용하는 M1은 가속도, 각속도, 그리고 각가속도 RMSE에서 M2와 M3보다 각각 평균 2.57 m/s
2, 0.52 rad/s 그리고 18.4 rad/s
2 감소하여, 추정 성능이 각각 101, 108 그리고 107% 향상되었다. 힘 추정 RMSE의 경우 M1은 M2와 M3보다 각각 평균 32.1과 23.9 N 감소하여 평균 98%의 오차 개선 효과를 보였다. 반면, 토크 추정 RMSE에서는 M2와 M3보다 각각 3.61과 3.41 Nm 감소하여 평균 28%의 개선 효과를 보였다. 따라서, 제안 칼만 필터를 사용함으로 발생하는 운동학 데이터에서의 추정 성능 향상만큼 힘 영역에서는 개선 효과가 크게 발생하였지만, 토크 영역에서는 기대한 만큼의 개선 효과를 보지 못하였다.
Table 4 RMSE of thigh segment kinematics estimation in test 3
Table 4
|
aC,i [m/s2] |
ωi [rad/s] |
ω˙i rad/s2
|
|
M1 |
2.54±0.2 |
0.44±0.1 |
17.11±2.1 |
|
M2 |
5.27±0.6 |
1.37±0.2 |
33.71±6.0 |
|
M3 |
4.95±0.5 |
0.55±0.1 |
37.24±7.5 |
Fig. 5 RMSE results of the hip joint force and torque estimation in test 3
토크 오차의 개선 효과가 상대적으로 작은 이유에 대해 알아보기 위해 역동역학식에서 각 분절의 운동학적 물리량이 포함된 항의 크기와 비중을 알아보았다.
Table 5는 Test별 관절 토크
추정식(2)와 힘
추정식(1)에 포함되는 각 항의 평균제곱근(Root Mean Square, RMS)과 차지하는 비율이다. 토크 추정식에서 움직임의 동적 수준이 올라갈수록 각속도와 각가속도가 포함된 항의 RMS와 차지하는 비율이 증가하지만, Test 3에서
JC,iω˙i와
ωi×(
JC,iωi)항이 차지하는 비율이 각각 1.56, 0.1%로 나머지 항에 비해 매우 작았다. 반면, 힘 추정식에서는 움직임이 빨라짐에 따라 가속도가 포함된 항이 차지하는 비율이 약 5%까지 증가하여 각속도와 각가속도가 포함된 항보다 상대적으로 비중이 매우 컸다. 이는 분절의 각속도와 각가속도가 분절의 질량 중심 가속도에 비해 추정 오차에 미치는 영향이 작다는 것을 나타낸다. 따라서, 본 실험에서 제안 칼만 필터를 사용함으로 발생하는 토크 오차 개선 효과가 힘 오차 개선 효과보다 작았다.
Table 5
RMS and portion of each terms in the inverse dynamics equation
(a) Joint torque equation [N]
Table
|
JC,iω˙i
|
ωi×(JC,iωi) |
Others |
|
Test 1 |
0.21 (0.26%) |
0.01(0.01%) |
72.7 (99.7%) |
|
Test 2 |
0.42 (0.71%) |
0.04 (0.06%) |
58.2 (99.2%) |
|
Test 3 |
1.44 (1.56%) |
0.09 (0.10%) |
90.5 (98.3%) |
(b) Joint force equation [Nm]
Table
|
mi aC,i
|
mi g
|
F
D,i
|
|
Test 1 |
3.62 (0.87%) |
44.5 (10.8%) |
365 (88.4%) |
|
Test 2 |
11.4 (2.20%) |
44.5 (8.54%) |
465 (89.3%) |
|
Test 3 |
30.8 (4.93%) |
44.5 (7.13%) |
548 (87.9%) |
이상의 결과에서 확인할 수 있듯이 본 논문에서 제안하는 칼만 필터를 사용하였을 때, 모든 실험 결과에서 관절 힘 및 토크의 실시간 추정 성능이 가장 우수하였다. Test 1과 같이 움직임이 느린 경우 연조직 변형과 LPF의 시간 지연으로 인한 오차가 크지 않아 제안 방법을 통한 개선 효과가 미미하였지만, 움직임의 동적 수준이 올라갈수록 그리고 근위부일수록 두 방법에 비해 제안 칼만 필터의 추정 성능이 더욱 두드러졌다. 특히, SI축의 힘 추정 성능과 ML축의 토크 추정 성능의 향상이 가장 크게 나타났다. 실시간 LPF의 경우 시간 지연에 따른 오차가 관절의 힘 및 토크의 실시간 추정에 심각한 추정 오차를 야기시키는 것을 확인하였으며, 실험에 따라서는 필터링을 전혀 하지 않은 IMU 신호를 사용하는 것보다 더 낮은 추정 성능을 보여주었다.
제안 칼만 필터에서 Z축 단위벡터(즉, 자세) 추정 오차의 공분산 ΣZ는 움직임의 동적 수준에 영향을 받는다. 즉, 움직임이 빨라질 경우 추정 정확도가 떨어져 오차가 증가한다. 하지만, 본 논문의 검증 실험에서는 추정 오차의 공분산을 상수로 설정하였다. 자세 추정 오차의 변동성을 고려하여 공분산 ΣZ을 가변적으로 설정하면 보다 향상된 성능을 얻을 것으로 기대된다.
5. 결론
본 논문은 IMU 기반 실시간 관절 힘 및 토크 추정 역동역학을 위한 신체 분절의 운동학적 물리량을 추정하는 칼만 필터를 제안하였다. 기존에는 잡음이 심한 운동학적 물리량에 대하여 LPF를 적용함으로써 잡음에 의한 오차를 완화시켰으나, LPF가 유발하는 시간 지연으로 인해 타 장치와의 실시간 동기화 시 애로가 있었다.
제안 칼만 필터는 공분산을 통해 칼만 필터의 잡음 저감 효과를 활용하면서도 시간 지연 없이 분절의 운동학적 물리량을 추정할 수 있다. 제안 칼만 필터의 성능 검증을 위해 세 가지의 각기 다른 동적 조건을 갖는 실험에서 각각 실시간 저주파 통과 필터와 원신호를 사용한 운동학적 물리량으로 관절 힘과 토크를 실시간으로 추정한 결과와 비교하였다. 검증 실험 결과, 제안 칼만 필터는 기존에 사용되는 저주파 통과 필터와 달리 신체 연조직 변형으로 인해 IMU가 떨리는 현상에서도 추정 성능이 크게 훼손되지 않으며, 시간 지연이 발생하지 않아 실시간 저주파 통과 필터보다 우수한 추정 성능을 보였다. 특히, 움직임이 가장 빠른 제자리 뛰기 동작 시 고관절 힘 및 토크 추정 오차에서 실시간 저주파 통과 필터를 사용한 방법보다 각각 100 및 29% 향상된 결과를 보여주었다. 제안 칼만 필터는 움직임의 동적 조건에 맞게 공분산을 조정하는 과정을 요구하지만, 실시간으로 관절의 힘과 토크를 추정해야하는 분야에서 추정 성능 향상에 기여할 수 있을 것이다.
본 논문은 관절의 힘과 토크 추정을 위한 역동역학 수행에 필요한 운동학적 물리량을 OMC가 아닌 IMU로 대체하는 과정에 대한 것이다. 이 과정에서 운동학적 물리량의 정확도는 IMU를 이용하여 추정한 자세의 정확도에 영향을 받는다. 연쇄적으로, 관절의 힘과 토크 추정 정확도는 IMU 기반 운동학적 물리량의 정확도에 영향을 받는 것이 당연하다. 본 논문에서 제안된 칼만 필터는 측정 모델에 포함된 자세의 정확도에 따라 측정 모델과 진행 모델 간의 공분산 조절을 통하여 자세의 정확도 저하가 운동학적 물리량에 미치는 영향을 제한할 수 있을 것으로 기대된다.
ACKNOWLEDGMENTS
본 연구는 2018년도 정부(교육부)의 재원으로 한국연구재단 기초연구사업(No. 2018R1D1A1B07042791)의 지원을 받아 수행됨.
REFERENCES
- 1.
Mak, M. K., Levin, O., Mizrahi, J., and Hui-Chan, C. W., “Joint Torques during Sit-to-Stand in Healthy Subjects and People with Parkinson’s Disease,” Clinical Biomechanics, Vol. 18, No. 3, pp. 197-206, 2003.
10.1016/S0268-0033(02)00191-2
- 2.
Ford, K. R., Myer, G. D., and Hewett, T. E., “Longitudinal Effects of Maturation on Lower Extremity Joint Stiffness in Adolescent Athletes,” The American Journal of Sports Medicine, Vol. 38, No. 9, pp. 1829-1837, 2010.
10.1177/0363546510367425
- 3.
Dumas, R. and Chèze, L., “3D Inverse Dynamics in Non-Orthonormal Segment Coordinate System,” Medical & biological Engineering & Computing, Vol. 45, No. 3, pp. 315-322, 2007.
10.1007/s11517-006-0156-8
- 4.
Riley, P. O., Dicharry, J., Franz, J., Croce, U. D., Wilder, R. P., et al., “A Kinematics and Kinetic Comparison of Overground and Treadmill Running,” Medicine and Science in Sports and Exercise, Vol. 40, No. 6, pp. 1093-1100, 2008.
10.1249/MSS.0b013e3181677530
- 5.
Apkarian, J., Naumann, S., and Cairns, B., “A Three-Dimensional Kinematic and Dynamic Model of the Lower Limb,” Journal of Biomechanics, Vol. 22, No. 2, pp. 143-155, 1989.
10.1016/0021-9290(89)90037-7
- 6.
Tateuchi, H., Shiratori, S., and Ichihashi, N., “The Effect of Angle and Moment of the Hip and Knee Joint on Iliotibial Band Hardness,” Gait & Posture, Vol. 41, No. 2, pp. 522-528, 2015.
10.1016/j.gaitpost.2014.12.006
- 7.
Ounpuu, S., Gage, J., and Davis, R., “Three-Dimensional Lower Extremity Joint Kinetics in Normal Pediatric Gait,” Journal of Pediatric Orthopaedics, Vol. 11, No. 3, pp. 341-349, 1991.
10.1097/01241398-199105000-00012
- 8.
Winter, D. A., “Biomechanics and Motor Control of Human Movement,” John Wiley & Sons, pp. 188-195, 2009.
10.1002/9780470549148
- 9.
Hwang, S., Choi, S., Lee, Y.-S., and Kim, J., “A Novel Simplified System to Estimate Lower-Limb Joint Moments during Sit-to-Stand,” Sensors, Vol. 21, No. 2, Paper No. 521, 2021.
10.3390/s21020521
- 10.
Faber, G. S., Kingma, I., and van Dieën, J. H., “Bottom-Up Estimation of Joint Moments during Manual Lifting Using Orientation Sensors Instead of Position Sensors,” Journal of Biomechanics, Vol. 43, No. 7, pp. 1432-1436, 2010.
10.1016/j.jbiomech.2010.01.019
- 11.
Khurelbaatar, T., Kim, K., Lee, S., and Kim, Y. H., “Consistent Accuracy in Whole-Body Joint Kinetics during Gait Using Wearable Inertial Motion Sensors and In-Shoe Pressure Sensors,” Gait & Posture, Vol. 42, No. 1, pp. 65-69, 2015.
10.1016/j.gaitpost.2015.04.007
- 12.
Van den Noort, J. J., Van der Esch, M., Steultjens, M. P., Dekker, J., Schepers, M. H., et al., “Ambulatory Measurement of the Knee Adduction Moment in Patients with Osteoarthritis of the Knee,” Journal of Biomechanics, Vol. 46, No. 1, pp. 43-49, 2013.
10.1016/j.jbiomech.2012.09.030
- 13.
Liu, T., Inoue, Y., Shibata, K., Shiojima, K., and Han, M., “Triaxial Joint Moment Estimation Using a Wearable Three-Dimensional Gait Analysis System,” Measurement, Vol. 47, pp. 125-129, 2014.
10.1016/j.measurement.2013.08.020
- 14.
Forner-Cordero, A., Mateu-Arce, M., Forner-Cordero, I., Alcántara, E., Moreno, J., et al., “Study of the Motion Artefacts of Skin-Mounted Inertial Sensors under Different Attachment Conditions,” Physiological Measurement, Vol. 29, No. 4, pp. N21-N31, 2008.
10.1088/0967-3334/29/4/N01
- 15.
Chiari, L., Della Croce, U., Leardini, A., and Cappozzo, A., “Human Movement Analysis Using Stereophotogrammetry: Part 2: Instrumental Errors,” Gait & Posture, Vol. 21, No. 2, pp. 197-211, 2005.
10.1016/j.gaitpost.2004.04.004
- 16.
Kristianslund, E., Krosshaug, T., and Van den Bogert, A. J., “Effect of Low Pass Filtering on Joint Moments from Inverse Dynamics: Implications for Injury Prevention,” Journal of Biomechanics, Vol. 45, No. 4, pp. 666-671, 2012.
10.1016/j.jbiomech.2011.12.011
- 17.
Derrick, T. R., van den Bogert, A. J., Cereatti, A., Dumas, R., Fantozzi, S., et al., "ISB Recommendations on the Reporting of Intersegmental Forces and Moments during Human Motion Analysis,” Journal of Biomechanics, Vol. 99, Paper No. 109533, 2020.
10.1016/j.jbiomech.2019.109533
- 18.
Lee, J. K., “A Parallel Attitude-Heading Kalman Filter without State-Augmentation of Model-Based Disturbance Components,” IEEE Transactions on Instrumentation and Measurement, Vol. 68, No. 7, pp. 2668-2670, 2019.
10.1109/TIM.2019.2906417
- 19.
Sabatini, A. M., “Quaternion-Based Extended Kalman Filter for Determining Orientation by Inertial and Magnetic Sensing,” IEEE Transactions on Biomedical Engineering, Vol. 53, No. 7, pp. 1346-1356, 2006.
10.1109/TBME.2006.875664
- 20.
Roetenberg, D., Luinge, H. J., Baten, C. T., and Veltink, P. H., “Compensation of Magnetic Disturbances Improves Inertial and Magnetic Sensing of Human Body Segment Orientation,” IEEE Transactions on Neural Systems and Rehabilitation Engineering, Vol. 13, No. 3, pp. 395-405, 2005.
10.1109/TNSRE.2005.847353
- 21.
Welch, G. and Bishop, G., “An Introduction to the Kalman Filter,” Technical Report 95-041, University of North Carolina at Chapel Hill, 1995.
- 22.
Davis III, R. B., Ounpuu, S., Tyburski, D., and Gage, J. R., “A Gait Analysis Data Collection and Reduction Technique,” Human Movement Science, Vol. 10, No. 5, pp. 575-587, 1991.
10.1016/0167-9457(91)90046-Z
- 23.
Wu, G., Siegler, S., Allard, P., Kirtley, C., Leardini, A., et al., “ISB Recommendation on Definitions of Joint Coordinate System of Various Joints for the Reporting of Human Joint Motion-Part I: Ankle, Hip, and Spine,” Journal of Biomechanics, Vol. 35, No. 4, pp. 543-548, 2002.
10.1016/S0021-9290(01)00222-6
- 24.
Dumas, R., Cheze, L., and Verriest, J.-P., “Adjustments to McConville et al. and Young et al. Body Segment Inertial Parameters," Journal of Biomechanics, Vol. 40, No. 3, pp. 543-553, 2007.
10.1016/j.jbiomech.2006.02.013
Biography
- Ji Seok Choi
M.Sc. candidate in the School of ICT, Robotics and Mechanical Engineering, Hankyong National University. His research interests include wearable sensing and IMU-based human motion tracking.
- Chang June Lee
M.Sc. candidate in the Department of Mechanical Engineering, Hankyong National University. His research interests include IMU-based human motion tracking and joint torque estimation as well as wearable robotics.
- Jung Keun Lee
Professor in the School of ICT, Robotics and Mechanical Engineering, Hankyong National University. His research interests include inertial sensing-based human motion tracking, biomechatronics, wearable sensor applications, and system dynamics and control.