ABSTRACT
This paper relates to the implementation of moving object position estimation by Pulsed LiDAR that can detect objects with high precision, speed, and spatial resolution. LiDAR measures the distance by calculating a return travel time when target is reflected. The retro-reflector, regardless of incident angle, can be reflected horizontally in the incident direction. This algorithm proposes a new approach method using LiDAR and retro-reflectors. According to the above algorithm, position can be determined by automatically detecting 90% of the reflected return beam intensity from moving objects to which the retro-reflector is attached. When this algorithm was applied indoors, it was possible to locate the position of the scanner accurately within ±5 mm error in 2,500 × 2,500 (mm) space. Also, it can detect a space of up to 5,000 × 5,000 (mm), making this an effective method for determining the position of a moving object in indoors.
-
KEYWORDS: Light detection and ranging, Retro-reflector, Pulse ranging technology, Time of filght, Effective reflector beam, Moving object
-
KEYWORDS: 라이다, 역반사체, 펄스형 거리 측정 기술, 비행시간 거리 측정 기법, 유효 복귀 빔, 이동체
1. 서론
라이다는 영어로 Light Detection and Ranging (LiDAR)의 약자로 풀이되기도 하지만 그 이름의 기원을 따지면 Light와 Radar (Radio Detection and Ranging)를 혼합하여 만든 합성어이다. 즉, 라이다라는 명칭은 전파 대신에 빛을 활용한 레이다를 뜻하는 것으로, 전통적인 레이다와 원리가 같으나 사용하는 파장이 다르므로 실제 이용 기술과 활용 범위는 다르다.
1-3 기본적으로 LiDAR는 자율 주행 차량의 공간 및 주변 환경을 파악할 수 있다.
4 자율 주행 환경에 카메라 및 레이더 센서와 함께 사용하는 필수적인 센서로서 지붕에 부착하여 주변 환경에 대한 3D 지형 정보를 수집하고, GPS 및 바퀴에 부착된 위치 정보 센서를 활용하여 정확한 위치 정보를 수집할 수 있다. 또한, LiDAR 센서는 높은 정확도, 속도 및 공간분해능으로 인해 사실적인 고차원 이미지 정보를 제공하며 다양한 분야에서 널리 활용되고 있다. Bufton
5는 LiDAR를 결합하여 공항 및 고층 건물과 같은 탐색 제한을 제기하는 지상 물체를 자동으로 식별하는데 사용하였으며, Richard
6는 LiDAR를 활용하여 전력선 로봇이 경로에 있는 장애물을 감지할 수 있었다. 한편, Sprunk
7는 LiDAR를 통하여 모바일 로봇의 궤적을 반복적으로 학습함으로써 추적 오차를 최소화할 수 있었고, Lee
8는 산림지역에서 연구대상으로 수목의 특성에 따라 지형의 변화를 평가하였다. 이와 같이 LiDAR는 레이저 펄스를 공간상의 특정 지점에 조사되고, 그 빛이 주위의 대상 물체에서 반사되어 돌아온 빔의 시간차를 측정해 공간상에 존재하는 물체의 절대거리 및 3차원 형상을 측정하는 기술로서 실생활에서 응용되고 있다. LiDAR와 같은 빛의 속도를 이용한 거리 측정하기 위해서는 대부분 비행시간법(Time of Flight, TOF)을 이용한다.
9
한편, 실내 또는 실외에서 사용되는 LiDAR의 경우 대체로 자동차나 로봇 상단에 센서를 탑재하여 주변 환경이나 공간을 파악하는 용도로 사용하고 있다. 하지만 발전소와 같이 특성상 환경이 열악하고 공간이 협소한 곳에서 검사 및 정비를 할 경우 검사하는 스캐너에 센서를 탑재하기가 난이하다. 이러한 경우 빛을 Retro-Reflector를 통하여 입사 방향으로 반사시킬 수 있는 방법이 있다.
10 Retro-Reflector는 삼면체 프리즘으로 큐브의 모서리를 형성하는 3개의 반사면을 사용하는 광학 구조이다. 이 방식은 Retro-Reflector의 한 부분에 빛이 입사가 되면 빛의 방향에 관계없이 입사 광선을 180
o로 반사하게 된다. 따라서, 이동체에 Retro-Reflector를 결합한 상태에서 고정된 LiDAR를 통하여 Retro-Reflector의 반사 빔을 인식하면 이동체의 위치를 확인할 수 있다. 이러한 Retro-Reflector는 주로 분광학, 전장 기술 및 위성과 분야에 이용된다.
11,12 본 연구에서는 GPS 없는 환경에서 Retro-Reflector 및 2-D LiDAR를 통하여 이동체에 위치를 추적할 수 있는 알고리즘을 제안한다. 해당 알고리즘은 Retro-Reflector가 부착된 이동체의 반사되는 90% 이상의 복귀하는 빔 강도를 자동으로 LiDAR가 감지하여 이동체의 위치를 파악할 수 있다. 또한, XY 평면 2,500 × 2,500 (mm) 공간에서 알고리즘의 성능을 확인하였다.
2. Retro-Reflector
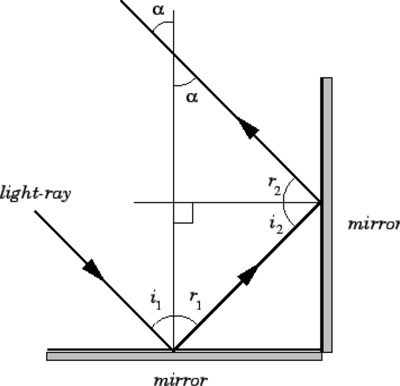
역 반사체(Retro-Reflector)는 말 그대로 광원에서 빛이 입사되었을 때 빛을 다시 광원으로 반사시킬 수 있는 광학 부품이다. 파면에 정확히 수직이고, 입사각이 0인 경우에만 광원으로 다시 반사시키는 평면 거울에 비해 Retro-Reflector는 넓은 입사각에서 반사가 가능하다.
Fig. 1에 나타낸 바와 같이 2개의 거울이 직각으로 인접하였을 때 임의의 방향에서 입사한 광선이 반사됨을 보여준다.
Fig. 1의 하단 거울에 빛이 입사될 경우 삼각법에 의하여
식(1)과 같이 나타낼 수 있다. 하지만 빛의 정반사가 됨을 가정하였을 때
r1 =
i1 이고,
r2 =
i2 이 되면
식(2)를 산출할 수 있고,
식(1)과
식(2)에 의하여
식(3)으로 표현될 수 있다. 따라서, 2개의 거울이 수직으로 인접할 경우 반사각(
α)과 입사각(
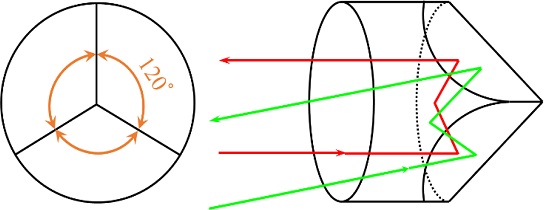
i1)이 동일한 관계를 가진다. 상술한 원리를 이용하여 3개의 상호직교하는 프리즘을 120
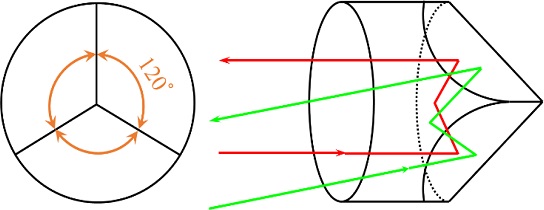
o 간격으로 배치하여 입사빔의 방향과 평행인 방향으로 광선을 반사할 수 있다. 이러한 조합을 이용한 제작된 광학 부품이 CCP (Corner Cube Prism)이다.
Fig. 2와 같이 CCP에 입사된 빛은 내부 전반사를 통해 입사각이 0이 아닌 경우에도 빔 또는 이미지가 반전되어 180
o로 반사된다. 들어오는 광선을 [a, b, c]라 할 때, 광선이 첫 번째 측면에서 반사되면 광선의 x 좌표 a는 -a로 반전되어 [-a, b, c]가 된다. 마찬가지로, 두 번째 측면 y에서 마지막으로 세 번째 측면 z에서 반사되면 b 및 c가 모두 반전된다. 따라서 입사된 빛은 [a, b, c]에서 [-a, b, c], [-a, -b, c]에서 [-a, -b, -c]로 상전환되어 광원으로 향한다. 이는 처음 반사되는 위치와는 관계없이 반사기에 들어오는 모든 빛에 적용된다.
Fig. 1 Principle of reflector
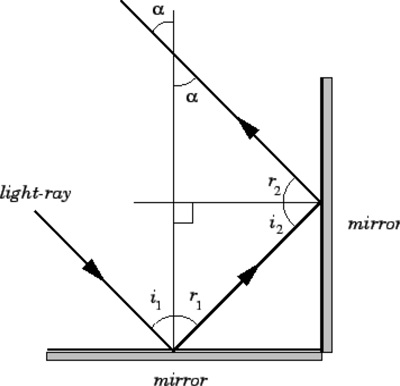
Fig. 2 Configuration of corner cube prism
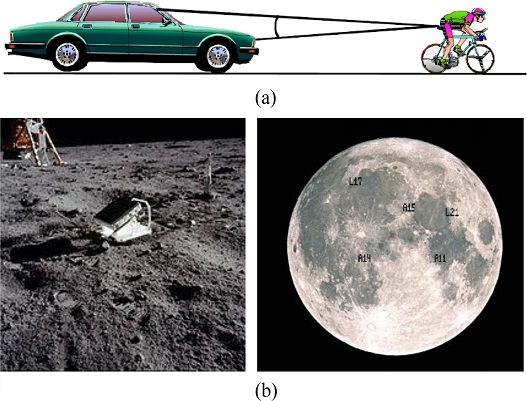
이와 같이 Retro-Reflector를 활용하게 되면 광원에서 나온 빛이 광원으로 다시 반사될 수 있다. 즉 도로 표면, 도로 표지판, 차량 및 안전 관련 의류 등에 사용된 것으로 볼 수 있다. 또한,
Fig. 3(a)와 같이 야간 운전 중 자전거에 부착된 플라스틱 반사판을 볼 수 있다. 이는 자동차의 헤드라이트가 Reflector 표면을 비추게 되면 반사된 빛이 자동차와 운전자에게 자신의 위치를 나타낸다. 한편, Retro-Reflector는 Apollo 프로그램의 일부인 Luna Laser Ranging Experiment 관련 중요한 요소로 사용된다.
13 이 실험 중 지구와 달 사이의 거리를 계산하는 방법으로 CCP를 활용하여 장치를 제작하였다. 각 CCP는 용융 실리카 재질로 만들어졌으며 직경이 38이고, 전체 하우징은 478 mm이다. 이러한 Retro-Reflector의 원리를 이용하여 달에 가지 않고 지구에서 빛을 입사해서 거리를 측정할 수 있었다.
Fig. 3 Applications of retro-reflector
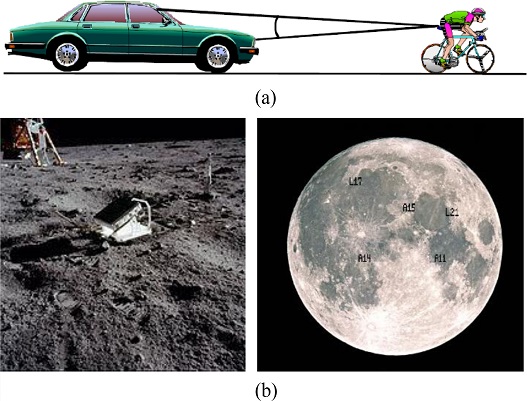
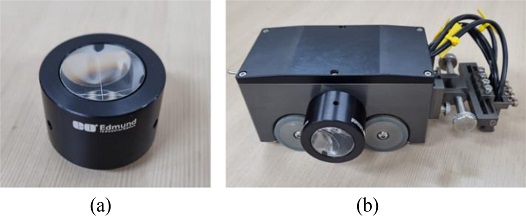
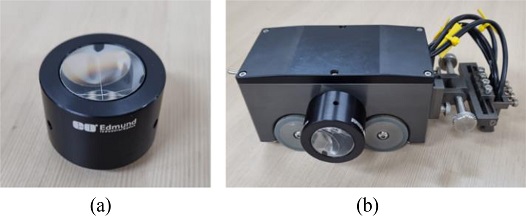
Fig. 4(a)는 Edmund사의 CCP이다. 이 Reflector는 직경이 25.4 mm이며, 빔 편차는 ±3
o, 파장 범위는 500-10,000 nm을 감지한다.
Fig. 4(b)는 LiDAR에 의한 이동체 위치를 추적하기 위하여 Reflector를 스캐너에 부착한 모습을 나타낸다.
Fig. 4 Attaching the retro-reflector to the scanner
3. Pulse Ranging Technology
LiDAR를 통하여 사물을 인식하거나 머신 비전, 자율주행과 같은 물체의 움직임 또는 시간을 측정하기 위해서는 비행시간 기법인 TOF를 활용한다.
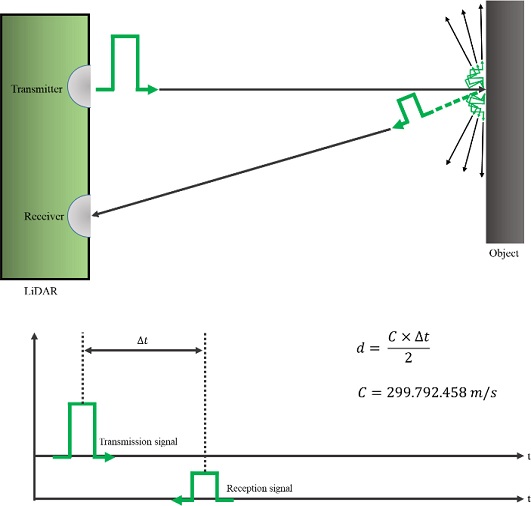
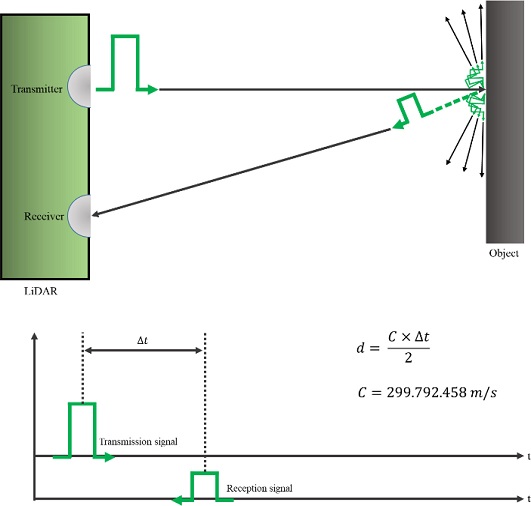
Fig. 5에 나타낸 바와 빛의 속도 상수와 반사광 펄스의 TOF 기반으로 물체와의 거리를 계산한다. 즉, 레이저 다이오드에 의해 방출되어 대상 물체에 반사되고 감광성 수신 소자에 의해 기록된다. 따라서, TOF 방식은 빛의 속도를 이용하여 송신과 수신 사이에 결정된 경로에서 대상 물체까지의 정확한 거리를 결정할 수 있다. 여기서 C는 광속이며, 는 물체까지 경과된 시간을 나타낸다. 이는 대상 물체의 거리에 따라 빛의 전파 시간이 달라지는 것을 알 수 있다. 본 연구에 활용되는 2-D LiDAR R2000은 PRT (Pulse Ranging Technology) 기술
14을 사용한다. 연속적으로 광선을 방출하는 다른 TOF 센서와 달리 PRT 센서는 초당 최대 250,000번의 고강도 빛의 펄스를 방출하여 짧은 시간 내에 다양한 주변 및 물체의 거리를 정밀하게 측정할 수 있다. 또한, PRT 펄스의 에너지 밀도를 최대 1,000배까지 증폭하여 넓은 거리에서도 안정적이고 신뢰성 있는 감지가 가능하다.
15
Fig. 5 Principle of pulsed LiDAR
한편, 빛의 속도로 측정된 거리가 오차가 1 mm 이내의 정확도를 달성하기 위해서는 6.6 ps 펄스 타이밍이 필요하다. 이러한 정확도를 달성하기 위해서는 고가의 장비가 필요하며 장비가 있더라도 측정오차가 누적되어 사실상 거리를 계산하기 난해하다. 따라서, TOF 및 PRT와 같은 조명과 반사각 사이의 거리 측정하는 방법으로는 펄스 형태의 샘플을 간접적으로 취득하는 방식을 주로 활용한다.
16,17 여기서 펄스를 이용한 거리 측정 방법은 사물을 인식하고 다시 반사되는 수신기의 픽셀에 감지되었을 때 위상차를 이용한다.
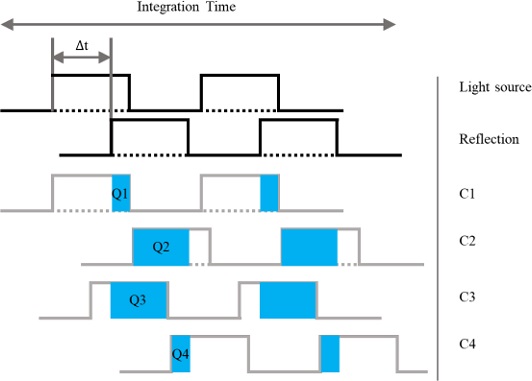
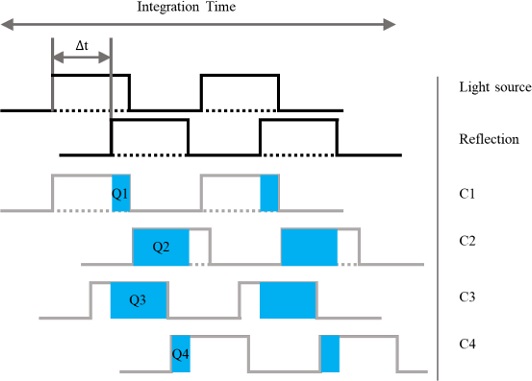
Fig. 6과 같이 방출된 광원에서 펄스파는 반사체에 입사해서 다시 돌아오는 시간(Δt)만큼 위상이 지연된다. 이렇게 반사된 빔은 CMOS 소자 픽셀 내부의 커패시터 C1, C2에 의하여 병렬로 샘플링이 된다. C1, C2는 역위상 차이를 이용하여 반사된 에너지를 순차적으로 감지하여 물체를 인식하게 된다. 이때 감지된 물체가 Q1, Q2라고 했을 때
식(2)를 통하여 거리가 계산된다.
Fig. 6 Object recognition of pulsed LiDAR
4. 이동체 위치추정 알고리즘
4.1 VLP-16을 활용한 선행연구
자율주행 센서로 많이 활용되고 있는 Velodyne VLP-16은 대체로 자동차나 로봇 상단에 센서를 탑재하여 외부 환경을 지도로 작성하거나 거리를 인식한다. 하지만 발전소 내부 전력설비가 구축된 주요 부품 검사할 때 LiDAR를 고정시키고, 스캐너에 부착된 Reflector 위치를 인식하는 방법이 효과적이다.
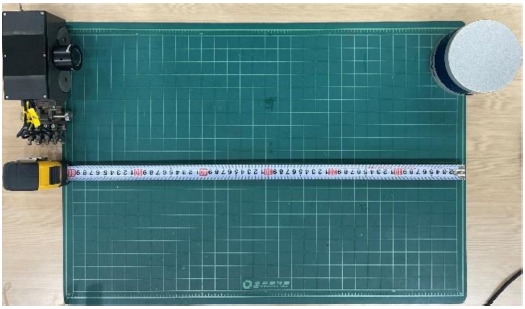
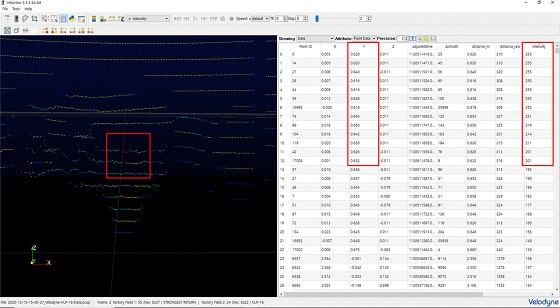
Figs. 7과
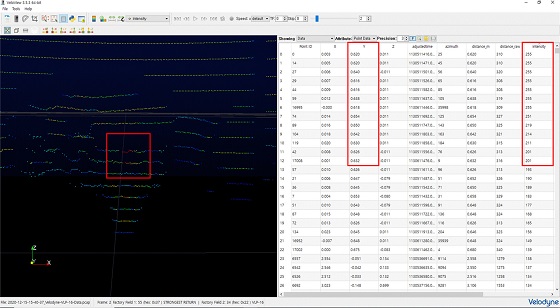
8은 VLP-16과 전용 소프트웨어를 활용하여 600 mm 지점에서 Reflector를 인식했을 때 실험 결과이다.
Fig. 8에 나타낸 바와 같이 Intensity의 가장 높은 곳을 추출하였을 때 추출 영역의 평균값은 629.6 mm이다. 이와 같이 VLP-16을 통하여 Reflector의 정확한 지점을 인식하기에는 클라우드 형식의 많은 데이터를 공존하게 되며 Intensity가 높은 감도를 추출해야 하는 번거로움이 있다. 또한, 360
o의 평면 뿐만 아니라 16
o의 경사각으로 빛이 조사가 되므로 거리가 증가할수록 감도는 약해지며 Reflector 및 스캐너의 인식이 난해하다. 따라서, 스캐너의 장착된 Reflector를 추적하기 위한 이동체 위치추정 알고리즘을 개발하여 정확한 위치 판별이 필요하다.
Fig. 7Experiment setup using the VLP-16
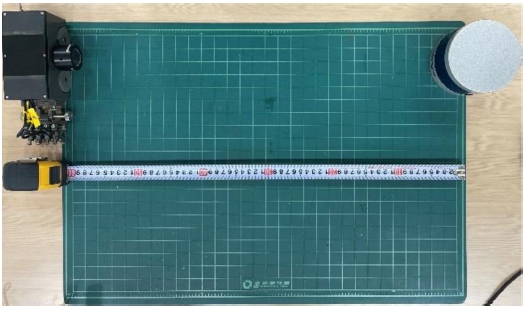
Fig. 8Experiment result using the VLP-16
4.2 R-2000을 활용한 알고리즘 구현
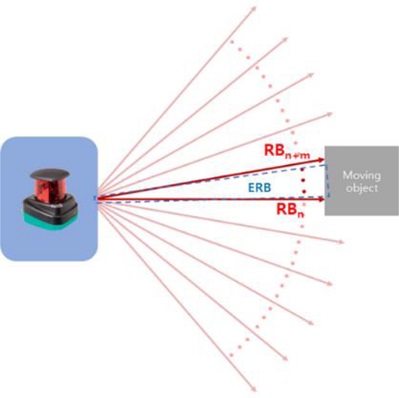
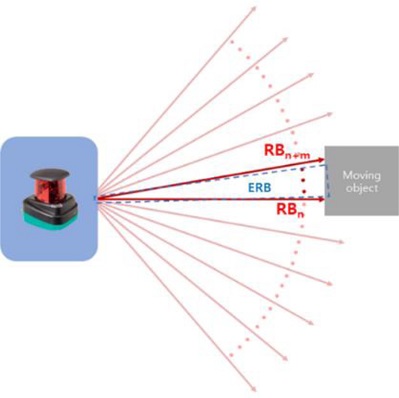
한편, R-2000을 활용한 이동체 위치추정 알고리즘은 이동체에 반사되는 복귀 빔의 강도(Reflector Beam, RB)를 이용한다. 복귀 빔의 강도는 Object의 표면 재질, 거칠기 및 수분 함량 등에 따라 반사율을 결정할 수 있다.
Fig. 9에 나타낸 바와 같이 이동체가 존재하였을 때 Reflector에 반사되는 복귀 빔이 추출할 수 있다. 첫 번째로 반사되는 복귀 빔을
RBn 이라 하였을 때 이동체 길이
RBn+m 까지 반사된다.
Fig. 9Extraction of reflector beam when object is detected
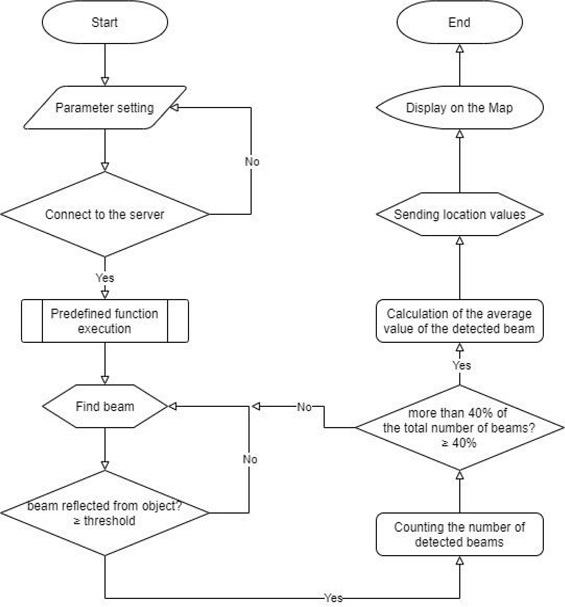
이때 복귀 빔 90% 이상의 강도를 임계값(Threshold)으로 설정하고, 임계값 이상의 강도를 가지는 복귀 빔의 수를 카운팅하게 되면
식(7)과
식(8)과 같이 나타낼 수 있다. 이는 이동체의 크기, 거리 및 LiDAR 빔 각도 분해능(0.014
o)으로 결정되는 전체 복귀 빔의 수를 나타낸다. 또한, 전체 복귀 빔 수에서 연속으로 감지하였을 때 40% 이상의 연속되는 복귀 빔을 유효 복귀 빔 수(Effective Reflector Beam, ERB)로 자동으로 이동체가 지시됨을 판단한다. 이동체를 감지한 것으로 판단되면, 유효한 복귀 빔에 대한 추정 거리를
식(10)과 같이 계산한 후에 평균값을 구하여 Object 위치 정보(LiDAR로부터의 거리 및 각도)를 구할 수 있다. 이때, ERB의 평균값을 구함으로써 이동체 형상이나 크기에 기인한 오차를 무시할 수 있다. 이처럼
Fig. 10에 나와있는 이동체 위치추정 알고리즘 블록다이어그램을 통해서 확인할 수 있다. 따라서, 이동체 위치추정 알고리즘에 의하여 추출된 이동체의 위치 정보는 지도 기반 프로그램에 의해 지시한다.
Fig. 10Block diagram of moving object estimation algorithm
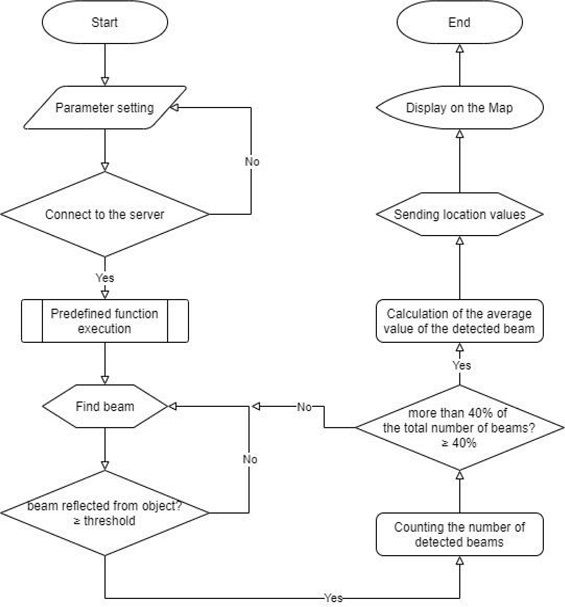
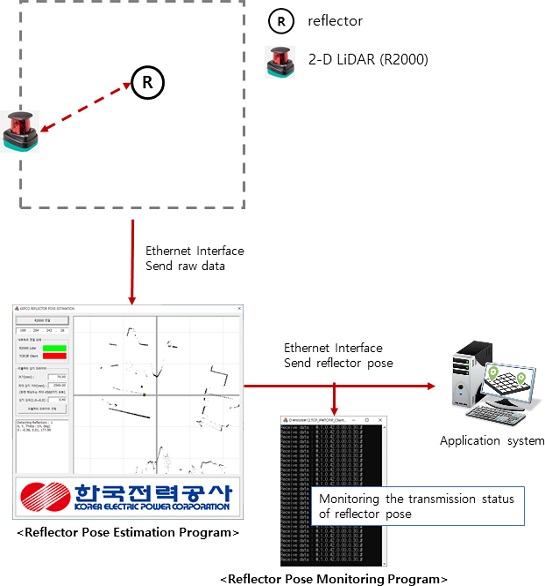
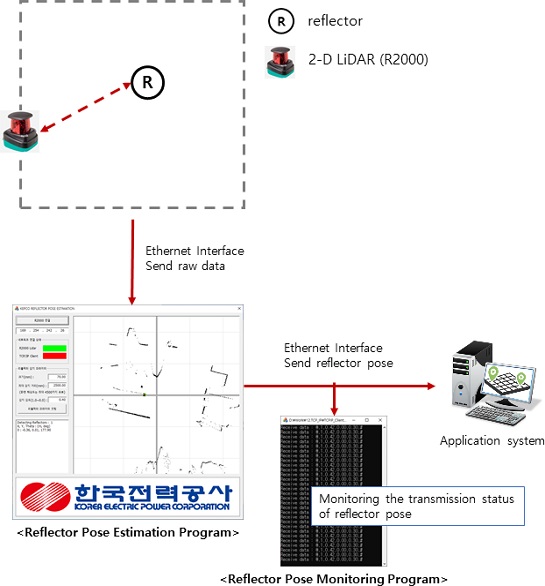
Fig. 11은 이동체 위치추정 시스템(Moving Object Estimation System)을 나타낸다. 상술한 시스템은 2차원 공간 내부에서 R-2000 및 Reflector로 구성되며 Reflector를 통한 알고리즘에서 감지된 이동체의 위치를 지도로 작성된다. 또한, Ethernet 기반의 모니터링 프로그램으로 이동체가 이동할 때마다 좌표를 추출할 수 있으며, LiDAR로부터의 X, Y축의 거리 및 각도를 프로그램의 하단에 지시하였다. 한편, 프로그램 좌측에는 Reflector의 직경 및 ERB 감도 개수를 조절할 수 있다.
Fig. 11Moving object estimation system
5. 실험 및 고찰
상술한 알고리즘 성능을 검증하기 위하여 거리별로 스캐너의 위치를 이동하며 측정하였다. R-2000의 경우 24 V의 DC 전압으로 전원을 공급해주며 Ethernet 통신 방식을 통하여 노트북에 연결된다. 또한, 360
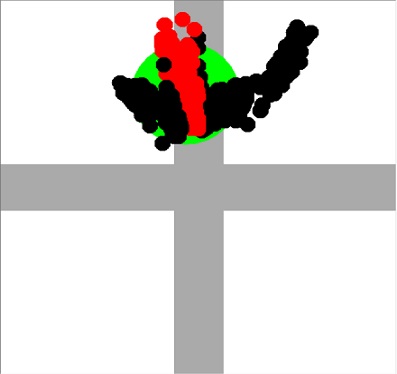
o로 XY 평면에서 반사되는 사물 또는 지형을 전체적으로 감지하여 지도를 작성할 수 있고, Reflector 부분은 별도의 색으로 표시하도록 하였다.
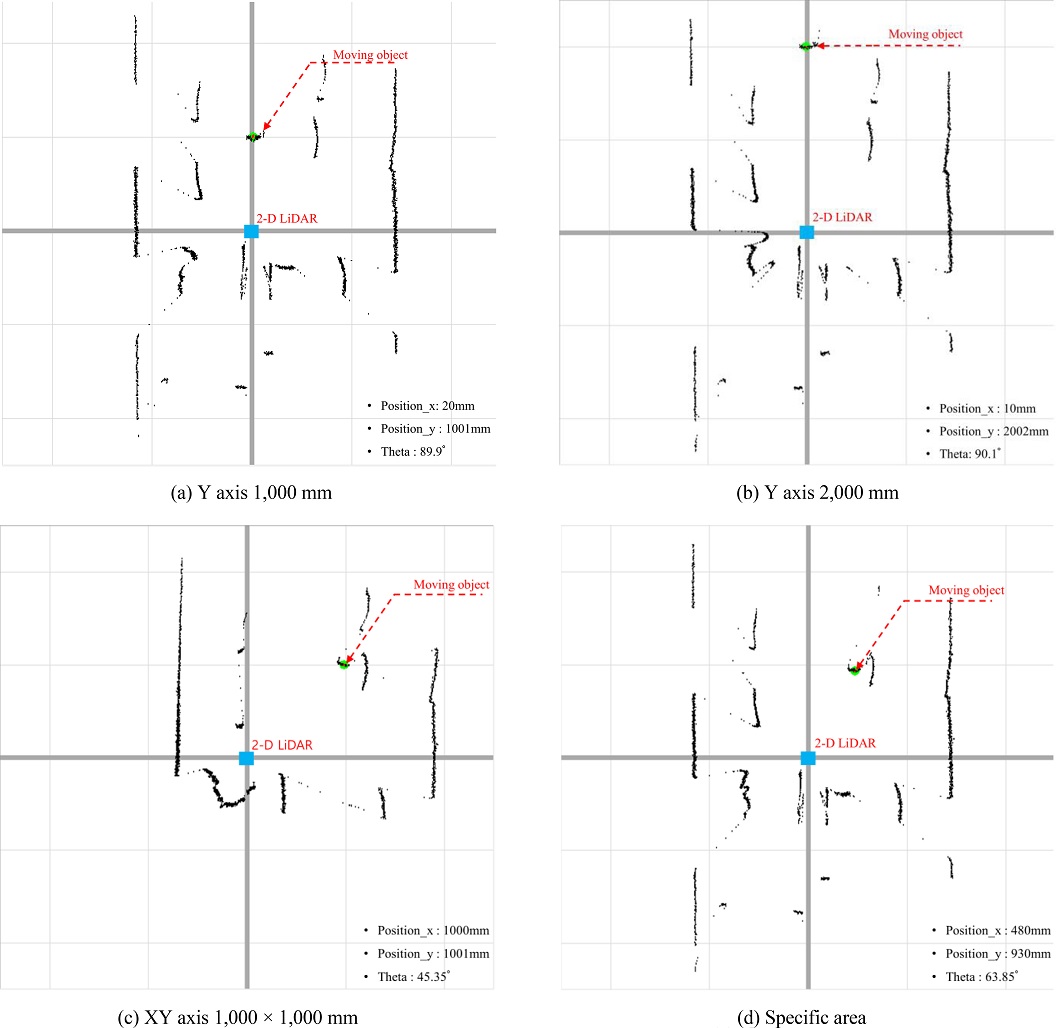
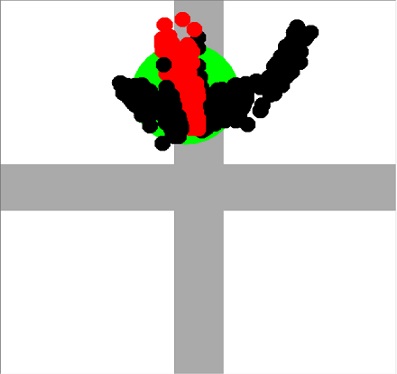
Fig. 12와 같이 20 × 200 mm 공간에서 측정하였을 때 검은색 부분은 스캐너 형상이 반사된 것이며 초록과 빨간색이 섞인 부분이 Reflector로 검출되는 것으로 볼 수 있다. 한편, 스캐너의 위치를 Y축 방향으로 1,000, 2,000 mm와 XY축 방향으로 1,000 × 1,000 mm 지점 및 임의지점으로 이동하면서 알고리즘의 성능을 검증하였다.
Fig. 12 Representation the position of scanner
Figs. 13(a)부터
13(d)에 나타낸 바와 같이 XY 평면 2,500 × 2,500 mm 공간에서 LiDAR로 취득한 스캐너의 위치를 보여준다. 상술한 R-2000 및 이동체 위치추정 알고리즘을 통한 프로그램은 특성상 360
o 반사 빔에 의하여 XY 평면상 LiDAR 주변 사물(실험실 의자, 서랍장 등)들을 관찰할 수 있다. 특히, 이동체를 부착한 Reflector를 실시간으로 감지할 수 있었으며, 각 지점에 대하여 이동체의 위치를 추정할 수 있다.
Fig. 13 Performance verification for moving object estimation algorithm in 2,500 × 2,500 mm space
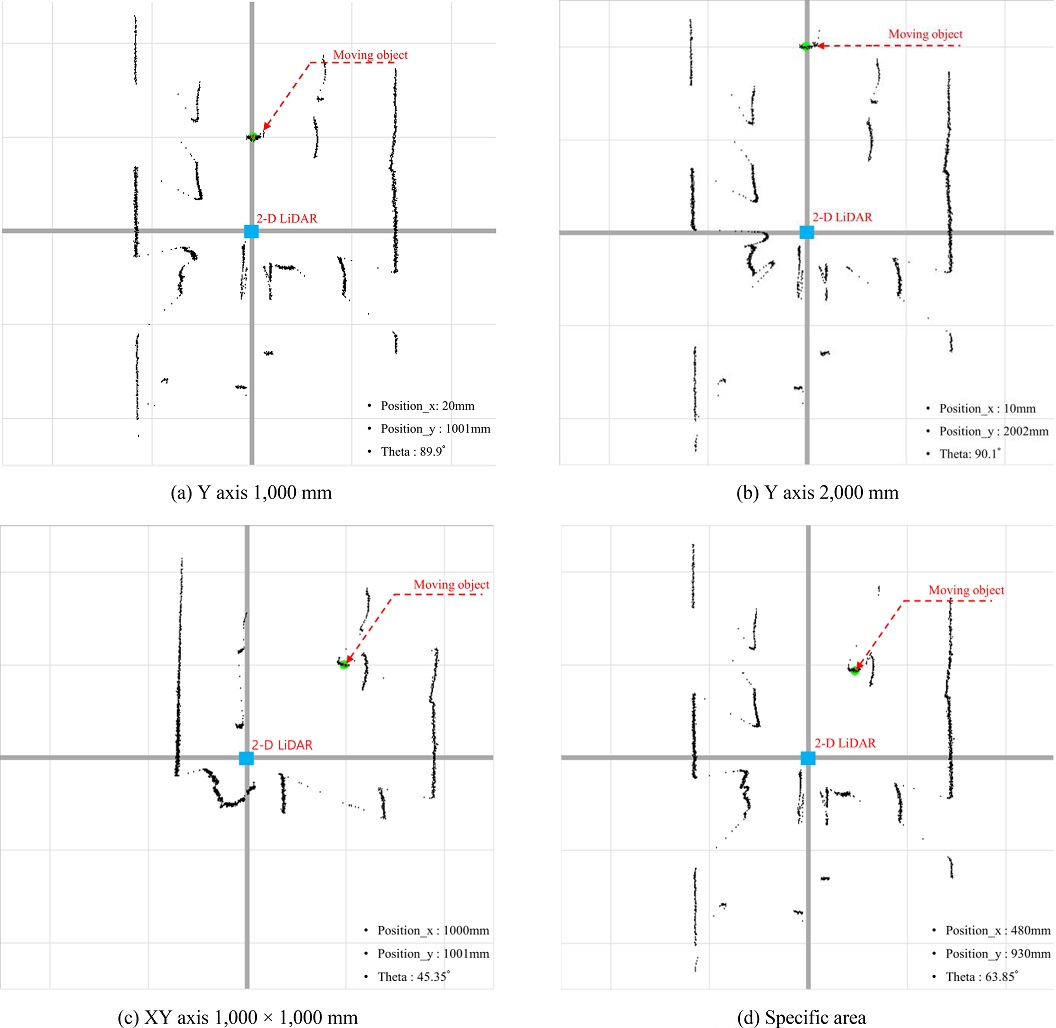
스캐너의 위치는 실제 거리와 ±5 mm 오차가 발생한 것으로 관찰할 수 있으며, LiDAR로부터 스캐너 XY 위치 및 각도는 오른쪽 하단에 지시하였다. 또한, 상술한 이동체 위치추정 알고리즘은 LiDAR로부터 감지 영역을 최대 5,000 × 5,000 mm까지 지정할 수 있으며, Reflector의 크기 및 ERB 개수를 설정 가능하여 Reflector에 장착된 스캐너의 위치를 정확히 추적할 수 있었다. 한편, 상술한 알고리즘은 LiDAR와 Reflector의 반사각이 커질 경우 원통형 형태의 Reflector로도 대체가 가능하다.
6. 결론
LiDAR는 반사될 때, 돌아오는 이동 시간을 계산하여 거리를 측정한다. 또한, Retro-Reflector는 입사각에 관계 없이 입사 방향으로 반사할 수 있다. 따라서, LiDAR 및 Reflector를 이용하여 이동체의 위치를 추적하기 위한 새로운 접근 방법을 제안하였다. 즉, 이동체에 Retro-Reflector를 부착한 상태에서 고정된 LiDAR를 통하여 Retro-Reflector의 반사 빔을 인식하는 방식으로 이동체의 위치를 확인할 수 있다. 본 논문에서는 높은 정밀도, 속도 및 공간 분해능으로 물체를 감지할 수 있는 Pulsed LiDAR에 의하여 이동체 위치추정 알고리즘 구현에 관한 것이다. 선행연구로 VLP-16 LiDAR를 통해서 Reflector의 정확한 지점을 인식하기에는 클라우드 형식의 많은 데이터를 공존하게 되며 Intensity가 높은 감도를 추출해야 하는 번거로움이 있다. 하지만 R-2000으로 구현한 해당 알고리즘은 이동체의 반사되는 복귀 빔 강도를 LiDAR가 인식하며 90% 이상의 복귀 빔수를 자동으로 감지하여 이동체 여부를 판단할 수 있다. 또한, 전체 복귀 빔 수에서 연속적으로 반사되는 ERB로 인식하여 Reflector를 부착한 스캐너를 추적하였다. 상술한 바와 같이 알고리즘을 적용한 LiDAR를 실내에서 활용하게 되면 위치 추적 실험 구현 결과 2,500 × 2,500 mm 공간상에서 ±5 mm 이내의 오차 범위로 정확하게 스캐너의 위치를 찾아낼 수 있었다. 또한 최대 5,000 × 5,000 mm의 공간을 감지할 수 있으며, 실내에서 움직이는 물체의 위치를 파악하는데 효과적인 방법이다.
ACKNOWLEDGMENTS
본 연구는 한국전력공사 전력연구원 발전사 공동과제(No. R20GA04)의 지원을 받아서 작성되었음.
REFERENCES
- 1.
Eum, J., Berhanu, E., and Oh, S., “Unmanned Aircraft Platform Based Real-Time LiDAR Data Processing Architecture for Real-Time Detection Information,” KIISE Transactions on Computing Practices, Vol. 21, No. 12, pp. 745-750, 2015.
10.5626/KTCP.2015.21.12.745
- 2.
Dominguez, R., Alonso, J., Onieva, E., and Gonzalez, C., “A Transferable Belief Model Applied to LiDAR Perception for Autonomous Vehicles,” Integrated Computer-Aided Engineering, Vol. 20, No. 3, pp. 289-302, 2013.
10.3233/ICA-130433
- 3.
Shang, E., An, X., Wu, T., Hu, T., Yuan, Q., et al., “LiDAR Based Negative Obstacle Detection for Field Autonomous Land Vehicles,” Journal of Field Robotics, Vol. 33, No. 5, pp. 591-617, 2016.
10.1002/rob.21609
- 4.
Lee, B., Wei, Y., and Guo, I. Y., “Automatic Parking of Self-Driving Car based on LiDAR,” The International Archives of the Photogrammetry Remote Sensing and Spatial Information Sciences, Vol. 42, pp. 241-246, 2017.
10.5194/isprs-archives-XLII-2-W7-241-2017
- 5.
Bufton, J. L., Garvin, J. B., Cavanaugh, J. F., Ramos-Izquierdo, L. A., Clem, T. D., et al., “Airborne LiDAR for Profiling of Surface Topography,” Optical Engineering, Vol. 30, No. 1, pp. 72-78, 1991.
10.1117/12.55770
- 6.
Richard, P.-L., Pouliot, N., and Montambault, S., “Introduction of a LiDAR-Based Obstacle Detection System on the LineScout Power Line Robot,” Proc. of the IEEE/ASME International Conference on Advanced Intelligent Mechatronics, pp. 1734-1740, 2014.
10.1109/AIM.2014.6878334
- 7.
Sprunk, C., Tipaldi, G. D., Cherubini, A., and Burgard, W., “Lidar-Based Teach-and-Repeat of Mobile Robot Trajectories,” Proc. of the IEEE/RSJ International Conference on Intelligent Robots and Systems, pp. 3144-3149, 2013.
10.1109/IROS.2013.6696803
- 8.
Lee, S. H., Lee, B. K., Kim, J. K., and Kim, C. J., “Accuracy Evaluation of LiDAR Surveys in Forest Areas,” Journal of the Korean Society of Surveying, Geodesy, Photogrammetry and Cartography, Vol. 27, No. 5, pp. 545-553, 2009.
- 9.
Andújar, D., Moreno, H., Valero, C., Gerhards, R., and Griepentrog, H., “Weed-Crop Discrimination Using LiDAR Measurements,” Precision Agriculture’13, pp. 541-545, 2013.
10.3390/s131114662
- 10.
Jeong, Y.-B. and Kim, Y.-H., “Analysis of the Reflection Characteristics of a Rectangular Corner Cube Retro-Reflector,” Korean Journal of Optics and Photonics, Vol. 26, No. 1, pp. 17-22, 2015.
10.3807/KJOP.2015.26.1.017
- 11.
Kim, J., Kim, S., and SC, C., “Design and Analysis of Displacement/Length Measuring System Using Laser Interferometry,” Journal of the Korean Society for Precision Engineering, Vol. 14, No. 10, pp. 151-156, 1997.
- 12.
Neubert, R., Grunwaldt, L., and Neubert, J., “The Retro-Reflector for the Champ Satellite: Final Design and Realization,” Proc. of the 11st International Workshop on Laser Ranging, pp. 260-270, 1998.
- 13.
Alley, C., Chang, R., Curri, D., Mullendore, J., Poultney, S., et al., “Apollo 11 Laser Ranging Retro-Reflector: Initial Measurements from the Mcdonald Observatory,” Science, Vol. 167, No. 3917, pp. 368-370, 1970.
10.1126/science.167.3917.368
- 14.
- 15.
Jiang, S., Bai, J., and Xu, Q., “Design and Implementation of Embedded Signal Processing System based on Pulsed Laser Ranging Technology,” Optical Instruments, Vol. 30, No. 3, pp. 37-41, 2008.
- 16.
Kim, D. and Choi, J., “Indirect Time-of-Flight Depth Sensor with Two-Step Comparison Scheme for Depth Frame Difference Detection,” Sensors, Vol. 19, No. 17, Paper No. 3674, 2019.
10.3390/s19173674
- 17.
Kim, J., Yasutomi, K., Kagawa, K., and Kawahito, S., “High-Linearity High-Resolution Time-of-Flight Linear-Array Digital Image Sensor Using Time-Domain Feedback,” Sensors, Vol. 21, No. 2, Paper No. 454, 2021.
10.3390/s21020454
Biography
- Jung-Seok Seo
M.S candidate in the Department of Mechanical Engineering, Chungnam University. He is currently working as General researcher at KEPCO Research Institute. His research interests are nondestructive testing & evaluation.
- Ju-Hyeon Park
Ph.D. candidate in the Department of Control and Instrumentation Engineering, Chosun University. He is currently working as Researcher at KEPCO Research Institute. His research interests are nondestructive testing & evaluation.
- Gye-Jo Jung
Ph.D. candidate in the Department of Mechatronics Engineering, Chungnam University. He is currently working as Senior researcher at KEPCO Research Institute. His research interests are nondestructive testing & evaluation.