ABSTRACT
In this study, the behavior of the driver was derived by conducting a crash simulation considering automated vehicle accident conditions using autonomous emergency braking (AEB) and a human body model (HBM). Based on car-to-car intersection accident conditions in the OSCCAR project and the actual accident report, a crash accident case was selected. The base crash scenario was reconstructed by conducting a driving simulation with reference to the selected accident cases. Additional simulations applying AEB are performed. Based on the boundary conditions, a car-to-car crash simulation was performed to derive a crash pulse. This crash pulse and HBM were applied to a simple cabin model for conducting driver behavior analysis. The results confirmed that the head behavior of the driver of the opposing vehicle increased in the lateral direction.
-
KEYWORDS: Autonomous emergency braking, Crash, Human body model, Automated vehicle
-
KEYWORDS: 자동 긴급 제동장치, 충돌, 인체 모델, 자율주행 차량
NOMENCLATURE
Future Occupant Safety for Crashes in Cars
Autonomous Emergency Braking
Left Turn Across Path-Opposite Direction
Left Turn Across Path-Lateral Direction
Left Turn/Opposite Direction-Straight Cross
Left Turn/Opposite Direction-Left Turn
1. 서론
최근 전기차의 상용화와 더불어 자율주행 차량(Automated Vehicle)에 대한 개발이 빠르게 진행되고 실주행 테스트가 수행되고 있다. 자율주행 차량의 실주행 시의 사고 위험에 대한 검증을 위하여 미국, 유럽을 포함하는 많은 나라들에서 관련 연구를 진행하고 있다.
미국 캘리포니아주에서는 자율주행 차량에 대한 운전 허가증을 발급하고 사고 발생 시 보고서를 제출하여 데이터를 수집하고 있으며, UNECE WP.29에서도 GRVA (Groupe des Rapporteurs Véhicules Automatisés)를 편성하여 자율주행 차량의 도로 주행 시 발생할 문제에 대응하기 위하여 규정을 발의
[1] 중에 있다.
유럽은 자율주행 자량 충돌 사고 시의 경향과 특성을 연구하기 위하여 OSCCAR 프로젝트
[2]를 진행하고 있다. 이 OSCCAR 프로젝트에서는 각 국가의 사고 데이터를 수집하여 DB화 후 주행 시뮬레이션 해석을 통하여 자율주행 차량 대 일반 차량의 충돌 유형을 그룹화하여 충돌 경향을 예측하였다. 특히 OSCCAR
[2] 연구에서는 현재 이상적인 LV4 자율주행 차량의 충돌 시 거동을 예측하기 위하여 자동 비상 제동장치(AEB)에서 사용되는 차량 인식센서의 범위를 이상적으로 가정하여 자율주행 자동차의 충돌을 시뮬레이션 하였다. NHTSA (National Highway Traffic Safety Administration)에서는 GST (Guided Soft Target) 로봇시스템을 이용하여 양산 차량의 ADAS (Advanced Driver Assistance Systems)를 확인하는 시험 절차에 대한 연구 초안이 담긴 보고서
[3]를 발표하였다. 레벨4 자율주행 차량의 상용화에 대비하여 자율주행 차량 대 일반주행 차량 충돌 상황에 대한 연구를 진행하고 있다.
자율주행 차량 대 일반주행 차량의 충돌을 방지하기 위하여 시험 분야에서는 ADAS 등 주행보조시스템 시험 보조를 위한 타겟 로봇 개발
[4], 자율주행 차량이 눈길(Snow-Asphalt)에서 효율적으로 멈추기 위한 AEB 알고리즘 개발
[5]이 이루어지고 있으며, 해석 분야에서는 사고 유형을 기반으로 가상 툴 체인 프로세스의 연구
[6]가 진행되고 있다. 또한 자율차의 시트 각도에 따라 정면 충돌 시 인체에 미치는 영향을 파악하기 위하여 HBM (Human Body Model)을 이용한 연구
[7]가 진행되었다. 이와 같은 연구들로 최근 자율주행 차량 충돌에 대한 주제가 대두되고 있으며, 자율주행 차량 충돌 시 내부 승객 거동을 파악하여 일반 차량 충돌에서 발생하지 않는 상해를 파악할 필요가 있음을 알 수 있다.
현재 양산되고 있는 자율주행 차량은 레벨2 수준이며, 양산된 차량은 교차로에서의 사고방지를 위한 AEB 시스템이 제한적으로 기능한다. 즉, 레벨4 수준의 자율주행 차량의 충돌 경향을 실험으로 검증하기는 어려움이 존재한다. 따라서 OSCCAR
[2] 프로젝트와 같이 교차로에서 가장 많이 발생하는 사고에 대한 사고 조건을 이용하여 사고차량이 자율주행 자동차로 대치되었을 경우의 사고 경향과 탑승자의 상해 정도를 확인하는 연구가 필요하다.
본 연구에서는 OSCCAR 충돌 유형 군집에 선정된 대표적 실사고 유형에 해당하는 좌회전 시 직진 주행 충돌 사고 중 1건을 국내 사고 데이터베이스에서 선정한다. 해당 교차로 근접 충돌 사고에서 자율주행 차량의 자동 비상 제동 기능을 OSCCAR에서 제안한 센서 범위 조건 및 제동 알고리즘을 적용하여 충돌 시뮬레이션을 수행하였다. 즉, 해당 사고가 자율주행 차량에 대해 발생하였다고 했을 때 충돌 사고 상황을 시뮬레이션 해석을 수행한다. 이 자율주행 차량 충돌 시뮬레이션 결과와 일반 차량의 충돌 사고 상황을 시뮬레이션한 결과를 비교하여 각 경우의 충돌 조건을 도출한다. 도출된 충돌 조건을 기준으로 충돌 해석에 적용하고 인체 모델을 이용하여 AEB 적용 유무에 따른 운전자의 거동을 확인하고, 자율주행 차량과 일반 차량의 사고 시 차량의 거동과 탑승자의 거동을 분석한다.
본 논문의 2장은 교차로 차대차 충돌 유형을 선정하는 과정을 제안한다. 3장에서는 해석 조건 선정을 위한 일반 차량의 충돌 시뮬레이션과 자율주행 알고리즘을 적용한 충돌 시뮬레이션 결과를 제안한다. 4장에서는 일반 차량과 자율주행 차량의 충돌 시 탑승자 거동을 시뮬레이션하고 결과를 비교 분석한다.
2. 교차로 차대차 충돌 유형 선정
OSCCAR 프로젝트 보고서
[2]의 내용에 따라 발생할 수 있는 자율주행 차량 대 상대 차량(Opponent Vehicle)의 예측된 교차로 충돌 사고 형태의 비율을
Table 1에 제시하였다.
Table 1에서 All은 모든 교차로 사고 형태 중 가장 빈번한 사고경향 군집(Cluster)을 의미하며, LTAP-OD는 자율주행 차량과 상대 차량이 교차로 맞은편에서 주행할 때 직진 및 좌회전으로 인한 충돌의 경우에 발생하는 사고 경향 군집을 의미한다. LTAP-LD는 교차로에서 자율주행 차량과 상대 차량의 주행이 직교 형태로 이루어지는 경우의 사고 경향 군집을 나타낸다. 각 군집에 따른 세부 군집의 총합은 100%이다.
Table 1 Crash configurations at intersection [2] (Adapted from Ref. 2 on the basis of OA)
Table 1
|
Case |
Index |
Visualization |
Cluster share [%] |
|
All |
1 |

|
50 |
|
2 |

|
50 |
|
LTAP-OD |
3 |

|
29 |
|
4 |

|
62 |
|
5 |

|
9 |
|
LTAP-LD |
6 |

|
59 |
|
7 |

|
26 |
|
8 |

|
15 |
Table 1에서 녹색은 자율주행 차량을 의미하고 청색은 자율주행 차량이 아닌 상대 차량을 의미한다. 모든 교차로 사고를 기준으로 경계 조건을 그룹화한 전체 유형(All Case)은 크게 2개의 군집으로 구분되어 있다. 대부분의 교차로 차대차 사고가 자율주행 차량과 상대 차량 중 한 대가 직진 중 상태, 나머지 차량이 좌회전 및 우회전 상태에서 주로 발생한 것으로 나타났다. LTAP-OD 유형의 경우 사고 건수의 대부분을 차지하는 3번, 4번 군집의 형태가 교차로 사고 전체를 기준으로 분류한 1번, 2번 유형과 유사한 결과를 보인다. LTAP-LD 유형의 6번, 8번 군집의 사고 형태도 2번 충돌 사고 유형과 유사함을 보인다.
Table 2는 OSSCAR 프로젝트의 자율주행 알고리즘 적용 시 발생할 수 있는 교차로 전체 사고의 세부 군집 중 가장 많이 차지하는 세부 군집을 나타낸 표이다.
Table 1의 2번과 유사한 방향 및 각도를 나타내는 유형이 전체의 24%를 차지하는 것을 확인하였다.
Table 2 Intersection accident in Germany and Sweden [2] (Adapted from Ref. 2 on the basis of OA)
Table 2
|
Nation |
Visualization |
Cluster share [%] |
|
Germany & Sweden |

|
24 |
본 연구에서는 국내 차대차 사고 심층분석 자료
[8]를 기반으로 총 200건의 교차로 차대차 충돌 데이터 중 서로 반대 방향으로 직진 및 좌회전 시 충돌이 발생한 사고 건(LT/OD)을 분석하였다.
Table 3에 제시한대로 총 53건으로 전체 충돌 사고 데이터에서 약 25%를 차지하는 수치이다. 또한 OSCCAR 자료에서 주로 발생하는 교차로 충돌 유형과 유사한 형태임을 확인하였다. 본 연구에서는 교차로에서의 좌회전 직전 사고 유형 중 한 가지를 선택하여 해석을 진행하였으며, 선정한 유형은
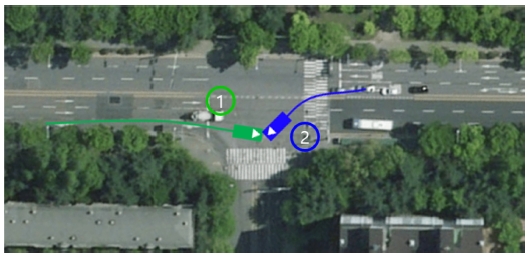
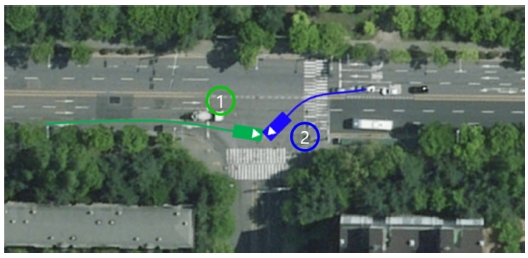
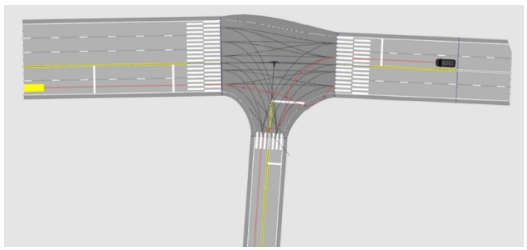
Fig. 1에 표기하였다.
Fig. 1에서 차량 1은 직진 중인 차량이고, 차량 2는 좌회전 중인 차량이다. 선정된 사고상황은 차량 1을 기준으로
Table 3의 LT/OD-SC에 해당하는 유형이며, OSCCAR 자료에도 군집의 대부분을 차지하고 있는 충돌 형태이다.
Table 3 Analysis data of vehicle accident at intersection [8]
Table 3
|
Type |
Number of cases |
Cluster share [%] |
|
LT/OD-SC |
27 |
13.5 |
|
LT/OD-LT |
26 |
13.0 |
Fig. 1 Diagram to represent a SC/OD-LT accident case
3. 해석 경계 조건 선정을 위한 주행 시뮬레이션
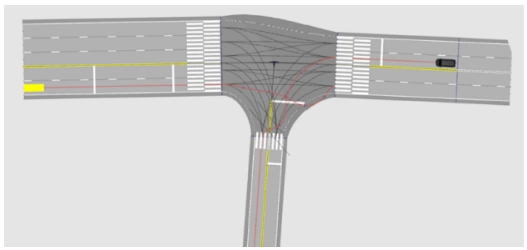
2장에서 설명한 국내 교차로 사고 보고서를 바탕으로 재구성한 주행 시뮬레이션 구성은
Fig. 2와 같다. 보고서에 공개된 데이터는 충돌 전 1초당 각 차량에 대한 이동거리, 속도, 이동 경로이다. 충돌 시나리오 재구성을 위하여 로드뷰를 기반으로 실제 도로와 같은 축적으로 도로를 구현하고, 보고서의 이동 경로를 기반으로 기본 경로를 작성하였다. 기본 경로를 이용하여 주행 시뮬레이션 진행과 함께 블랙박스 정지화면을 분석하여 상세 경로 수정을 진행하였다. 이 방법으로 반복 해석을 진행하였으며 충돌 포인트는 충돌 전 속도와 정지화면을 분석하여 예측하였다. 그 결과 충돌 시 차량의 충돌점은
Fig. 2와 같이 도출되었다. 두 차량의 접촉각(CA)은 105
o이며, 각 차량의 전방을 기준으로 1번 차량의 충돌점 기준 각도 차량 각도(CPA)는 17.5
o, 2번 차량의 CPA는 -22.5
o로 예측되었다.
Fig. 2 Simulation setting for SC/OD-LT accident case analysis
차대차 사고 시 자율주행 차량의 충돌 사고 상황을 구현하기 위하여 OSCCAR에서 제시하고 가정한 반경 200 m, 감지 각도가 180
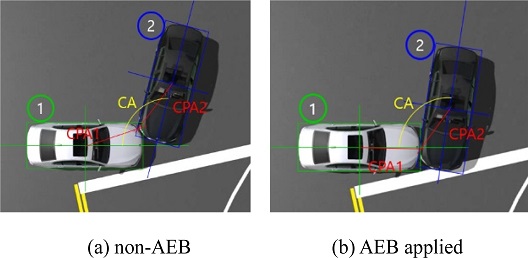
o인 이상적인 센서 감지 조건을 적용하였다. Carmaker 소프트웨어를 이용하여 자율주행 차량의 거동 시뮬레이션을 수행하였다. 다른 시뮬레이션 조건은 자율주행 기능이 적용된 AEB 알고리즘 외에는 기본 시나리오와 동일하게 구성하였다. 시뮬레이션 결과 충돌 시 차량의 위치는
Fig. 3과 같이 도출되었다.
Fig. 3 The collision points without AEB or with AEB
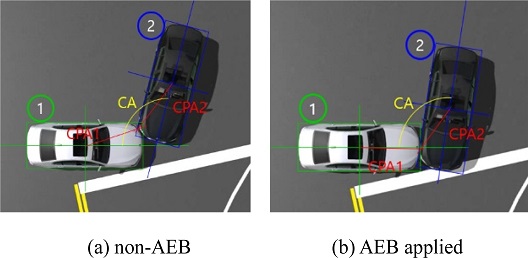
AEB로 인한 충돌 전 속도 감소로 인하여 2번 차량의 주행이 이전 해석 결과보다 측면 충돌에 가깝게 예측되었다. 즉, AEB 미적용 상태보다 2번 차량의 측면에 가까운 방향으로 1번 차량의 접촉이 발생한 것을 확인하였다. 두 차량의 CA는 99
o로 AEB 적용 전과 비교하여 더 직교에 근접하고, CPA 1은 -1.5
o, CPA 2는 -27.5
o로 도출되었고, 속도 조건은
Table 4에 표기하였다. Case 1은 차량 1, 차량 2 모두 AEB를 적용하지 않은 조건이며, 차량 1의 충돌 시 속도는 36.4, 차량 2의 속도는 24 kph이다. Case 2의 차량 1은 자율주행 AEB 기능을 적용하고, 차량 2는 AEB를 적용하지 않았을 때 충돌 조건을 나타낸다. 이때 차량 1의 속도는 24.6로 AEB에 의해 감속되었으며, 차량 2의 속도는 24 kph로 동일한 것을 볼 수 있다.
Table 4 Initial velocity for crash simulation
Table 4
|
Case |
Vehicle 1 [kph] |
Vehicle 2 [kph] |
|
Case 1 |
36.4 |
24 |
|
Case 2 |
24.6 |
24 |
4. 인체 모델을 이용한 충돌 시뮬레이션
3장에서 얻어진 두 가지 충돌 상황을 기반으로 차대차 충돌 시뮬레이션을 수행하고 탑승자의 거동을 분석한다. 이를 통하여 자율주행 차량 탑승자의 거동과 일반 차량의 탑승자 거동을 비교한다.
차대차 충돌 시뮬레이션을 진행하기 위하여 두 차량 모두 중형 세단이므로, NHTSA의 Honda Accord 모델을 선정하였다. 정면 충돌의 경우는 NHTSA 보고서
[9]에 검토 자료가 있으며, 측면 충돌에 대한 자료는 시험 충돌 데이터를 참조하였다. 누락된 모델을 보완하기 위하여 추가적인 해석 모델의 모델링을 진행하였다. 공개 모델에 누락된 측면 에어백은 NHTSA 보고서
[9]에 공개된 실 모델의 수치와 물성을 참고하여 구성하였다. 시험과 비교를 위하여 ES-2RE 더미를 NHTSA 시험 보고서
[10]를 참조하여 시트 포지셔닝하였고, 해석 결과는
Fig. 4와 같이 나타났으며, 측면 충돌에 따른 더미 머리 가속도의 CORA (Correlation and Analysis) 계수
[11]는 0.812, HIC36 (Head Injury Criteria 36 ms)는 시험 160, 해석 162로 유사하게 도출되는 것을 확인하였다.
Fig. 4 Comparison of test [10] and simulation results (Adapted from Ref. 10 on the basis of OA)

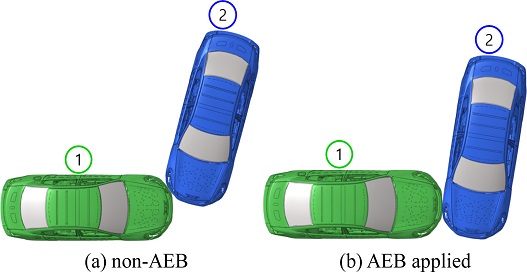
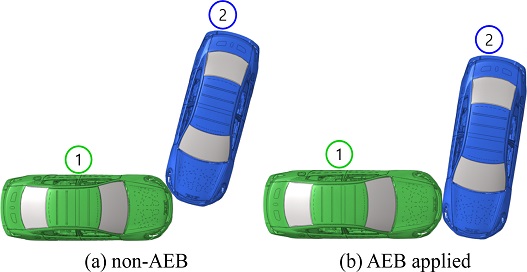
3장의 충돌 경계 조건을 바탕으로 차대차 충돌 시뮬레이션 구성은
Fig. 5와 같이 구성하였다. 속도 조건은
Table 4와 같이 주행 시뮬레이션 결과와 동일하게 적용하였다. 기준이 되는 차량 1과 차량 2는
Fig. 5에 제시하였다. 단순화 차량 모델에 속도를 입력하기 위하여 무게중심 위치에서 차량의 속도, 각속도를 기준으로 시뮬레이션을 수행하였다.
Fig. 5 Initial positions of crash simulation models without AEB or with AEB application
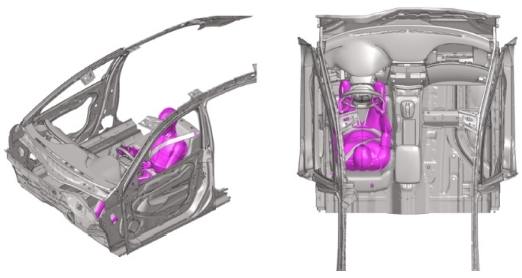
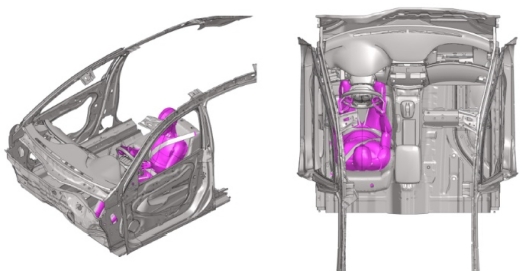
단순화 차량 모델은
Fig. 6과 같이 구성하였다. HBM은 THUMS (Total Human Model for Safety) 모델
[12,
13]을 이용하였으며, 좌석과 벨트 모델은 4.1절에서 검토한 NHTSA 모델과 동일한 모델을 사용하였다. THUMS 시트 포지션의 경우 H Point (Hip Point)를 정확히 알 수 없으므로 좌석의 좌판 위 부분까지 모션으로 이동한 후 중력을 가하여 착좌하는 방법을 사용하였다. 응력이나 힘 불균형을 고려하여 동적 완화(Dynamic Relaxation) 방식을 적용하였다. BIW (Body in White) 부분은 강체로 적용하였으며 대시 부분의 일부분 및 에어백은 유연체로 적용하였다. 도출된 속도, 각속도값은 차대차 해석에서 출력한 위치와 동일한 지점에 적용하였다.
Fig. 6 Simple cabin base model using THUMS
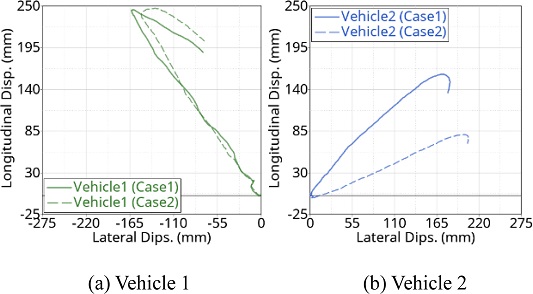
자율주행 차량과 상대 차량의 운전자 머리 거동 변화를 확인하기 위하여 해석 결과에 따른 머리 중심점의 위치 변화를 X-Y 평면에 투영하여
Fig. 7에 표현하였다. 이 그래프는 글로벌이 아닌 BIW의 로컬 좌표계 기준으로 계산되었으며, 0 sec일 때의 머리 중심 좌표는 (0, 0)을 기준으로 상대적인 거동을 표현하였다.
Fig. 7(a)는
Fig. 5 차량 1의 운전자 머리 거동을 나타내며,
Fig. 7(b)는
Fig. 5 차량 2의 운전자 머리 거동을 나타낸다. 그래프의 변위 방향은
Fig. 6의 우측 그림과 같이 위쪽을 바라보는 방향을 기준으로 정하였으며, 세로 방향(Longitudinal)은 위 아래를 의미하며, 좌 우는 가로(Lateral) 방향을 의미한다. 차량 1에 탑승한 운전자의 머리 거동은 커튼 및 운전자 에어백으로 인하여 AEB 적용 유무에 따른 거동 변화의 큰 차이가 없으며, 차량이 운전자의 시계 방향으로 회전하여 그래프상에서 머리가 운전자의 좌측 방향으로 움직이는 것을 확인할 수 있다.
Fig. 7 Excursion of head C.G. according to vehicles
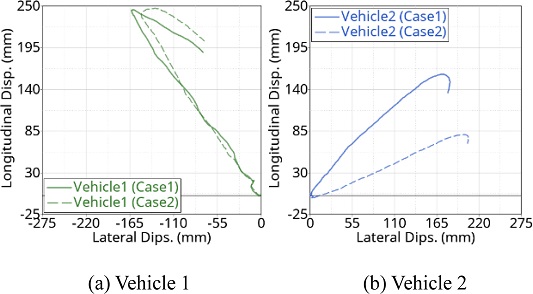
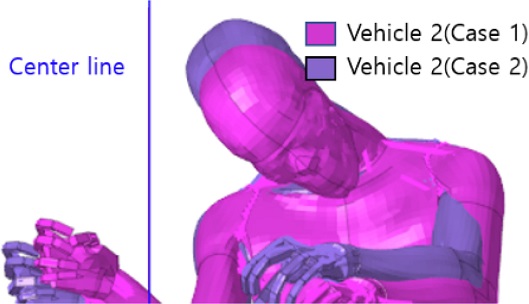
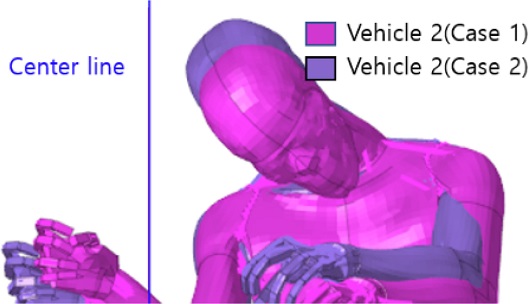
차량 2에 탑승한 운전자의 머리 거동은 차량 1의 AEB 적용 유무에 따라 가로 방향 변위 차이가 나타난다. AEB가 작동하며 속도 변화량은 줄었으나 충돌 포인트와 각도 변화로 인해 충돌이 측면 충돌과 유사한 형태로 발생하였고, 이로 충돌 힘의 방향이 바뀌어 약 30 mm 더 운전자 기준 우측 방향으로 거동이 일어난 것을 확인하였다. 이는
Fig. 8과 같이 차량 폭의 중심선을 기준으로 50 mm 안쪽인 거리이다. 초기속도는 Case 1이 더 빠르기 때문에 초기 운동에너지가 Case 2보다 높지만 충돌 지점 변화에 따라 운동에너지 감소에 영향을 미치는 부재가 달라짐에 따라 차량 2의 에너지 감소량이 다를 것으로 예상할 수 있다. 이에 에너지 증감으로부터 가로 방향 머리 거동이 달라지는 것을 예상할 수 있고, 이는 AEB 작동이 충돌 조건에 따라 심각하지는 않지만 상대적으로 악영향을 미칠 가능성이 있음을 시사한다.
Fig. 8 Differences in head behavior depending on the cases
5. 결론
본 논문에서는 OSCCAR 프로젝트에서 제안한 자율주행차 사고 유형과 유사한 국내 실제 사고를 바탕으로 자율주행 차량의 자동 비상 제동 기능(AEB)을 적용했을 때와 적용하지 않았을 때의 주행 시뮬레이션을 진행하였다. 이 해석 결과를 기반으로 인체 모델을 이용한 충돌 시뮬레이션을 진행하여 충돌 시 운전자의 머리 거동을 확인하였다.
OSCCAR 프로젝트의 차대차 교차로 사고 군집과 국내 사고 보고서의 통계 수치를 비교하여, 가장 많이 발생한 충돌 유형 중 유사한 충돌 사고 유형을 선정하였다. 선정된 사고 유형을 기반으로 주행 시뮬레이션을 진행하여 시나리오를 재구성하였고, 자율주행 차량에 해당하는 차량에 AEB 조건을 적용하여 AEB 유무에 따른 충돌 경계 조건을 도출하였다. 충돌 해석을 진행하기 위하여 공개해석 모델을 공개시험 데이터를 기반으로 하여 검토 및 수정하였다. 주행 시뮬레이션에서 도출된 충돌 경계 조건과 검토된 공개 모델을 이용하여 차대차 충돌 해석을 진행하였고, 무게 중심으로부터 충돌 펄스를 도출하였다. 인체 거동 시뮬레이션을 진행하기 위하여 단순화 차량 모델을 구성하였다. 구성된 단순화 모델과 충돌 펄스를 이용하여 차량 1의 AEB 적용 유무에 따른 운전자 머리 거동 변화를 확인하였고, AEB에 의한 충돌 지점 및 각도 변화에 따라 차량 2의 운전자 머리의 횡방향 이동량이 30 mm 증가한 것을 확인하였다.
ACKNOWLEDGMENTS
This research was supported by a grant (No. 21AMDP-C160637-01) from R&D Program funded by Ministry of Land, Infrastructure and Transport of Korean government.
REFERENCES
- 1.
- 2.
- 3.
Davis, I. J., & Forkenbrock, G. J., (2021). Intersection safety assist draft test procedure performability validation. (Report No. DOT HS 813 009). United States. Department of Transportation. National Highway Traffic Safety.
https://rosap.ntl.bts.gov/view/dot/56873
- 4.
Park, Y., Lee, S., Park, M., Shin, J., & Jeong, J., (2019). Target robot for active safety evaluation of ADAS vehicles. Journal of Mechanical Science and Technology, 33(9), 4431-4438.
10.1007/s12206-019-0839-3
- 5.
Wang, X., Wang, J., Sun, W., Wang, Y., Xie, F., et al., Development of AEB control strategy for autonomous vehicles on snow-asphalt joint pavement. International Journal of Crashworthiness, 1-21.
10.1080/13588265.2021.1971426
- 6.
Wågström, L., Leledakis, A., Östh, J., Lindman, M., & Jakobsson, L., (2019). Integrated safety: Establishing links for a comprehensive virtual tool chain. In the 26th International Technical Conference on the Enhanced Safety of Vehicles (ESV): Technology: Enabling a Safer TomorrowNational Highway Traffic Safety Administration, 19-0177.
- 7.
Wu, H., Hou, H., Shen, M., Yang, K. H., & Jin, X., (2020). Occupant kinematics and biomechanics during frontal collision in autonomous vehicles-can rotatable seat provides additional protection?. Computer Methods in Biomechanics and Biomedical Engineering, 23(5), 191-200.
10.1080/10255842.2019.1710496
- 8.
Cho, J., & Park, Y., (2021). Derivation of dangerous situation types based on in-depth analysis of traffic accidents in downtown of korea. In the 85th Conference on the Korean Society of Transportation, 718-723.
- 9.
Singh, H., Ganesan, V., James, D., Paramasuwom, M., & Gradischnig, L., (2018). Vehicle interior and restraints modeling development of full vehicle finite element model including vehicle interior and occupant restraints systems for occupant safety analysis using THOR dummies. (Report No. DOT HS 812545).
https://trid.trb.org/view/1662795
- 10.
- 11.
Gehre, C., Gades, H., & Wernicke, P., (2009). Objective rating of signals using test and simulation responses. In the 21st International Technical Conference on the Enhanced Safety of Vehicles Conference, 09-0407.
- 12.
- 13.
Poulard, D., Zhang, Q., Cochran, J. R., Gepner, B., & Kerrigan, J., (2016). Quantitative evaluation of the occupant kinematic response of the THUMS 50TH-percentile male model relative to PMHS laboratory rollover tests. Traffic Injury Prevention, 17(1), 101-108.
10.1080/15389588.2016.1192282
Biography
- Moon Young Kim
Ph.D. candidate in Graduate School of Automotive Engineering, Kookmin University. His research interest is automotive passive safety and occupant injury.
- Jangu Lee
MS candidate in the Department of Mechanical Systems Engineering, Kookmin University. His research interest is accident safety of autonomous vehicle.
- Jayil Jeong
Professor in the Department of Mechanical Engineering, Kookmin University. His research interest is system design for robot systems and safety system design of automated vehicles in accident situation.