ABSTRACT
Commercial exoskeletons currently utilize multiple sensors, including inertial measurement units, electromyography sensors, and torque/force sensors, to detect human motion. While these sensors improve motion recognition by leveraging their unique strengths, they can also lead to discomfort due to direct skin contact, added weight, and complex wiring. In this paper, we propose a simplified motion recognition method that relies solely on encoders embedded in the motors. Our approach aims to accurately classify various movements by learning their distinctive features through a deep learning model. Specifically, we employ a convolutional neural network algorithm optimized for motion classification. Experimental results show that our model can effectively differentiate between movements such as standing, lifting, level walking, and inclined walking, achieving a test accuracy of 98.76%. Additionally, by implementing a sliding window maximum algorithm that tracks three consecutive classifications, we achieved a real-time motion recognition accuracy of 97.48% with a response time of 0.25 seconds. This approach provides a cost-effective and simplified solution for lower limb motion recognition, with potential applications in rehabilitation-focused exoskeletons.
-
KEYWORDS: Exoskeleton, Motion recognition, Deep learning, Convolutional neural network
-
KEYWORDS: 외골격, 동작인식, 딥러닝, 합성곱 신경망
1. 서론
고령화 사회로의 급속한 진입과 함께 근골격계 질환의 발병률이 증가함에 따라, 일상생활에서 이동 및 작업 시 인체를 보조해주는 착용형 외골격(Exoskeleton) 기술에 대한 관심이 높아지고 있다[
1].
인체의 주요 운동 관절 중 하나인 고관절은 보행, 앉기, 서기, 일어섰다 앉기 등 매우 다양한 일상 동작을 수행하는 데 있어 핵심적인 역할을 담당한다. 이에 따라 고관절 외골격 시스템은 재활 및 산업 현장에서 착용자의 움직임을 효과적으로 지원하고, 근력 부담을 완화하거나 재활 훈련 효율을 높이는 해결책으로 주목받고 있다. 그러나 기존의 고관절 외골격 연구들은 메커니즘 설계나 추정 알고리즘에 중점을 둔 경우가 많다. 기존 알고리즘의 경우, 데이터의 복잡성을 충분히 반영하지 못하고, 새로운 환경이나 개별 사용자의 특성을 고려하는 데 한계가 있다[
2]. 이러한 문제를 해결하기 위해서는 고관절의 움직임 데이터를 빠르고 정밀하게 취득하고, 이를 효율적으로 분석·분류할 수 있는 알고리즘이 필수적이다. 최근에는 딥러닝(Deep Learning) 기법이 생체신호 및 시계열 센서 데이터를 다루는 분야에서 뛰어난 성능을 보임에 따라, 착용자의 동작을 실시간으로 파악하고 제어 알고리즘에 반영하기 위한 다양한 연구가 활발히 진행되고 있다[
3,
4].
합성곱 신경망(CNN, Convolutional Neural Network)은 이미지 처리 분야에서 주로 활용되어 왔으나, 시계열 데이터 분석에서도 뛰어난 패턴 인식 능력을 입증하고 있다[
5]. CNN 기반 알고리즘은 시계열 데이터에 존재하는 국소적 패턴을 효율적으로 학습할 수 있으므로, 상대적으로 노이즈가 많고 복잡도가 높은 인체 동작 데이터에 대해서도 높은 분류 정확도와 강건성을 확보할 수 있다[
6]. 더욱이 최근에는 경량화된 CNN 모델과 고속의 연산 환경이 결합됨에 따라, 외골격 시스템과 같은 실시간 제어 분야에서도 충분히 활용 가능하다는 점이 증명되고 있다.
본 연구에서는 다양한 센서(예: IMU, EMG 등)를 활용하는 기존 방법들과 달리[
7,
8], QDD (Quasi-direct Drive) 모터에 내장된 엔코더만을 이용해 고관절의 각도 및 각속도를 정밀하게 측정하는 외골격 시스템을 설계·제작하였다. 이를 통해 센서 구성의 간소화와 시스템 경량화를 동시에 달성하면서도, 엔코더 기반 시계열 데이터를 CNN으로 분석하여 정지·평지보행·경사보행·리프팅 네 가지 동작을 높은 정확도로 실시간 분류할 수 있음을 확인하였다. 아울러 슬라이딩 윈도우 최대 알고리즘(Sliding Window Maximum Algorithm)을 적용하여, 외부 잡음이나 센서 노이즈에 의한 오분류를 최소화하고 안정적인 동작 인식을 가능하게 하였다. 기존 연구들이 다중 센서 융합 또는 복잡한 신호처리 과정을 통해 동작 인식을 수행한 것과 달리, 본 연구는 단일 엔코더 기반의 간단한 하드웨어 구성과 경량화된 CNN 알고리즘만으로 높은 정확도와 실시간성을 동시에 확보한 새로운 프레임워크를 제안하였다는 점에서 독창적인 의의를 갖는다.
2. 고관절 외골격 시스템 설계 및 구현
2.1 고관절 외골격 시스템 설계
본 연구에서는 고관절 움직임 분석과 딥러닝 기반 동작 분류를 위해 간단한 고관절 외골격을 설계 및 제작하였다. 해당 외골격 시스템은 다른 부가적인 센서 없이 엔코더만을 이용해 고관절의 각도 및 각속도의 실시간 데이터를 정확하게 수집할 수 있도록 설계되었다.
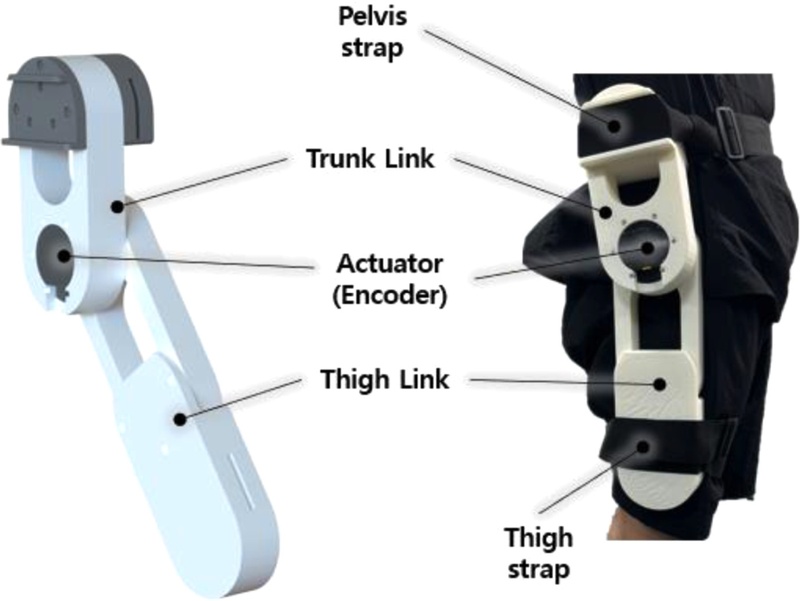
Fig. 1은 제작한 고관절 외골격 시스템의 3D 모델과 실제 착용 상태를 보여준다. 해당 장치는 허리 부위에 장착되는 링크(Trunk Link)와 허벅지 부위에 장착되는 링크(Thigh Link)가 연결된 구조이다. Trunk Link 의 길이는 220 mm, 두께는 38 mm이고, Thigh Link의 길이는 250 mm, 두께는 30 mm이다. 프레임은 PLA 재질로 3D 프린팅을 통해 제작되었으며, 외골격 전체 무게는 각 1.09 kg이다. 모터는 QDD 기반의 AK60-6 (T-motor)로, 고관절 회전축과 일치하도록 설계되었고, 사용자의 체형에 맞게 스트랩(벨크로 방식)을 통해 허리 및 허벅지에 고정된다.
Fig. 1.Hip exoskeleton prototype
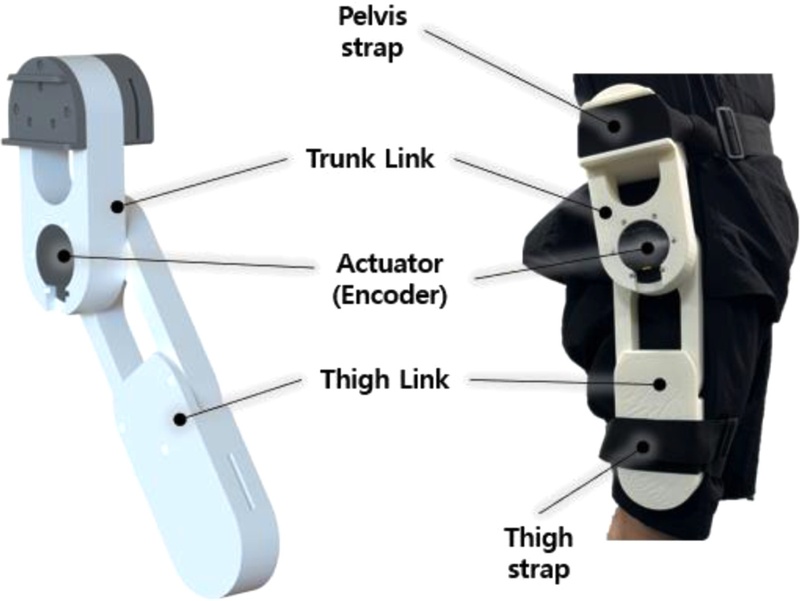
Trunk Link와 Thigh Link가 연결되는 고관절 모듈(Hip Module)은 모터를 포함한 구동부를 단일 하우징으로 일체화 하여 전체 부피를 최소화하고, 사용자 체형 및 해부학적 관절축에 가깝도록 정렬함으로써 보행이나 일상동작 시 외골격과 인체 사이의 간섭을 줄였다.
2.2 고관절 조인트 데이터 취득 및 처리
외골격 고관절 조인트의 각도와 각속도 데이터는 QDD 모터인 AK 60-6 (T-motor)에 내장된 엔코더(14bit, Absolute) 로부터 계산된다.
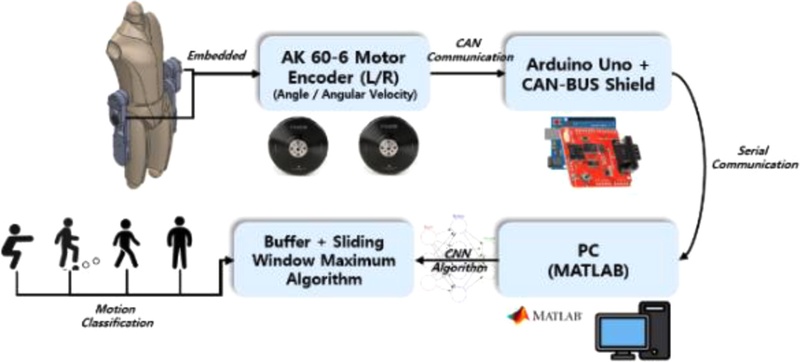
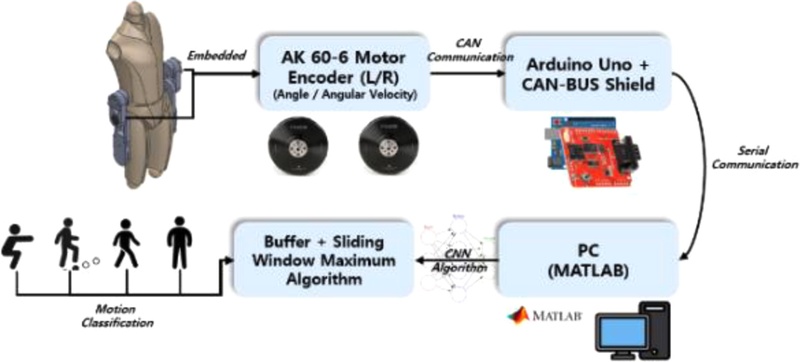
Fig. 2는 데이터 전송 및 취득 과정을 도식화한 것이다. 엔코더 데이터는 Arduino Uno의 CAN-BUS Shield (SparkFun)를 통해 CAN 통신을 이용하여 전달하며, 멀티채널을 사용했을 때, 50 Hz 주기로 각도 및 각속도 데이터를 획득한다. 이후 Arduino Uno에서는 CAN 메시지를 각도 및 각속도 데이터로 변환한다. 변환된 데이터는 유선 연결을 통해 PC로 전송되며, MATLAB (MathWorks) 환경에서 사전 학습된 딥러닝 모델에 입력되어 동작을 인식한다.
Fig. 2Schematic of data acquisition, transmission and motion classification process
3. 고관절 동작 인식 알고리즘 및 성능분석
3.1 CNN기반 고관절 동작인식 알고리즘
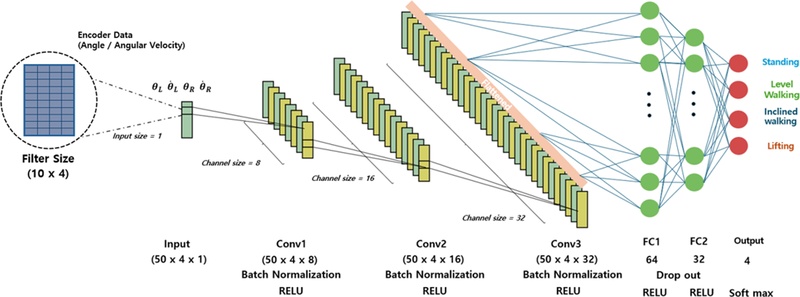
Fig. 3은 본 연구에서 제안한 CNN 기반 고관절 동작인식 알고리즘이다. 외골격 착용 시 측정되는 좌·우 고관절 각도
θl,θr 및 각속도
θ˙l,θ˙r 정보를 50 Hz의 샘플링 속도로 획득하여, 0.25초마다 50개의 샘플로 구성된 시계열 데이터 세트를 생성하고 이를 CNN 기반 동작 인식 알고리즘의 입력으로 활용하였다.
Fig. 3CNN model schematics
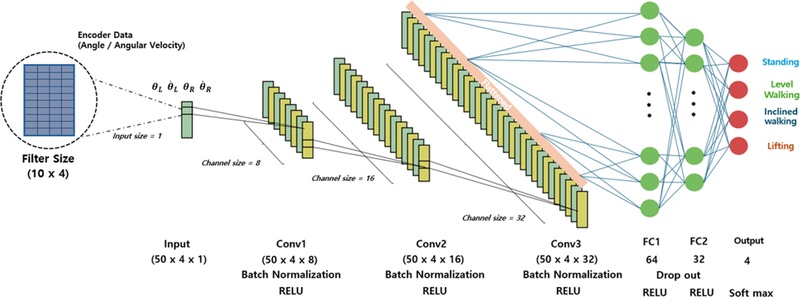
각도와 각속도는 시간 축에서 연속적이며 상호연관성이 높은 특성을 지니므로, 제안된 CNN 기반 동작인식 알고리즘은 합성곱(Convolution) 필터를 적용하여 국소적 패턴을 효과적으로 추출하고, 합성곱 연산을 통해 전체 시계열 구간에 대한 특징을 효율적으로 스캔한다. 특히 8채널, 16채널, 32채널로 구성된 세 개의 컨볼루션 레이어(Conv1, Conv2, Conv3)를 순차적으로 통과하면서 배치 정규화(Batch - Normalization)와 ReLU 활성화를 적용함으로써 학습의 안정성을 확보한다.
이후 고차원 특징은 평탄화(Flatten) 과정을 거쳐 1차원 벡터 형태로 변환되며, 64개 뉴런을 갖춘 첫번째 완결 연결층(FC1)과 32개 뉴런을 가진 두 번째 완전 연결층(FC2)을 거치게 된다. FC2 단계에서는 드롭아웃(Dropout)을 적용하여 과적합을 완화하고, 최종적으로 소프트맥스(Softmax) 함수를 통해 정지, 보행, 경사 보행, 리프팅 네 가지 동작에 대한 확률을 산출한다. 또한 분류 결과는 슬라이딩 윈도우 최대 알고리즘을 통해 동작 유형으로 최종 결정되어, 고관절 움직임에 대한 빠르고 정확한 인식이 가능하다.
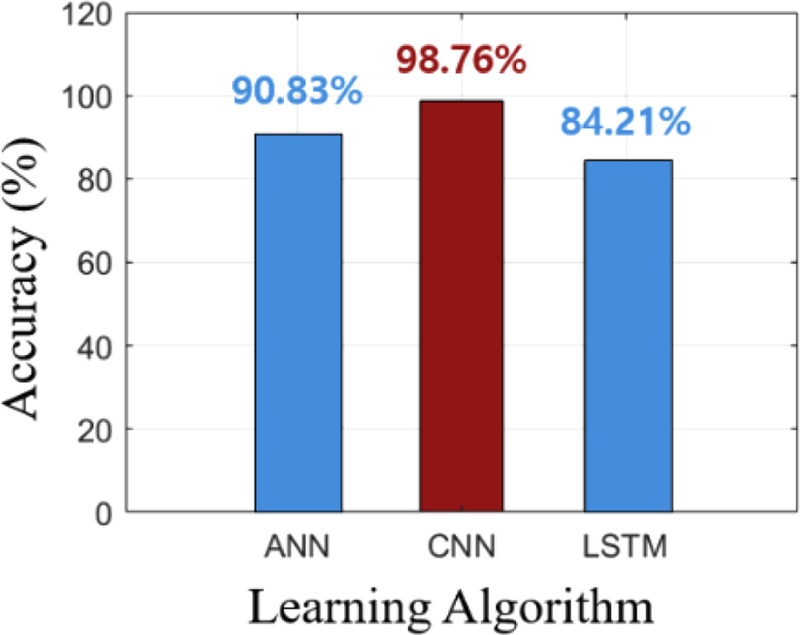
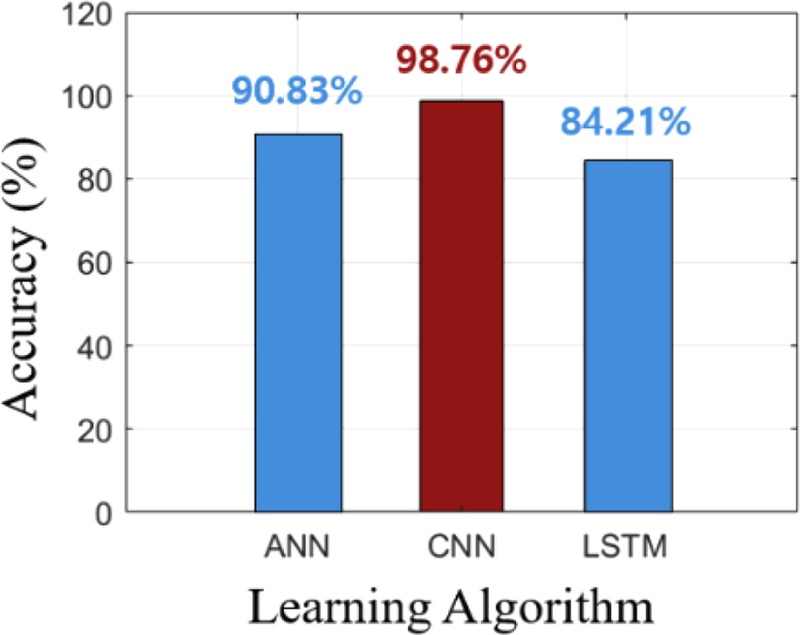
학습단계에서 동일 데이터를 이용해 ANN (Artificial Neural Network)과 LSTM (Long-short Term Memory) 모델로 학습한 결과,
Fig. 4에 도시한 바와 같이 각각 90.83%와 84.21%의 정확도를 보인 반면, 제안된 CNN 알고리즘은 98.76%의 탁월한 분류 성능을 나타내었다.
Fig. 4Accuracy comparison of different deep learning architectures
3.2 슬라이딩 윈도우 최대 알고리즘 기반 동작 분류
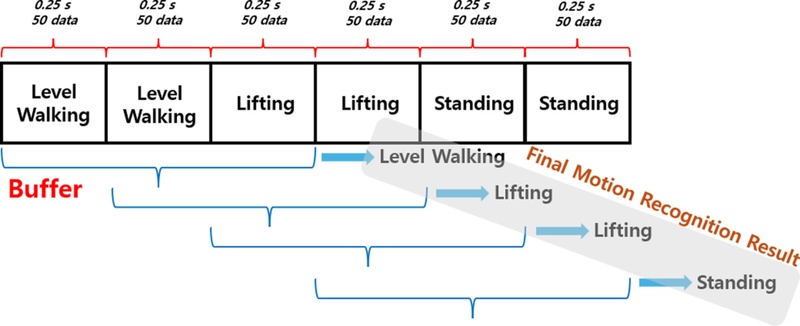
Fig. 5는 실시간 분류 시 발생하는 오류나 외란에 강건하게 판단하기 위해 사용한 슬라이딩 윈도우 최대 알고리즘 구조를 나타낸다. 슬라이딩 윈도우 최대 알고리즘을 사용하지 않고 0.25초 단위의 분류 결과를 최종적인 결과로 판단하는 경우, 짧은 시간 단위로 발생하는 외란이나 잡음으로 인해 동작 인식의 민감도가 증가하게 된다. 이러한 민감도 증가는 결과적으로 일시적인 신호 변화나 오류에 의해 잘못된 동작을 인식하게 될 확률이 높아진다.
Fig. 5Sliding window maximum algorithm
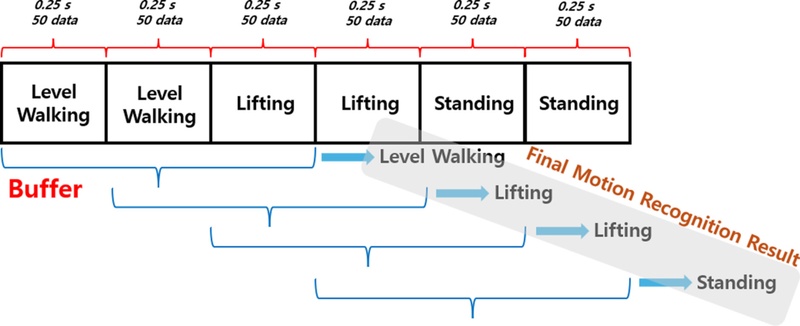
이를 해결하기 위해 앞서 언급한 알고리즘을 도입하여 정확도를 향상시켰다. 구체적으로, 누적된 세 개의 분류 데이터를 한 버퍼에 저장하고, 그 중 최댓값을 갖는 동작을 최종적인 결과로 판단하는 방식을 채택하였다. 이러한 방식은 일시적인 신호 변화의 영향을 완화하고, 최종 판단 단계에서 보다 안정적인 분류 성능을 제공할 수 있다.
4. 학습 데이터 수집 및 모델 성능 평가
4.1 학습 데이터 취득 절차
본 연구에서는 고관절 외골격을 착용한 5명의 남성 피험자를 대상으로 총 4가지 동작(정지, 평지보행, 경사보행, 리프팅)을 수행하도록 하여 학습 데이터를 수집하였다. 피험자의 신장, 체중은 각 175±2.0 cm, 74.8±4.8 kg이고 상세 인체 데이터는
Table 1에 기술하였다. 각 피시험자들은 정지(기립) 동작은 30초 동안 3세트를 수행하도록 하였으며, 보행과 경사보행(15º)은 각각 시속 2.4, 3.6, 4.8 km/h의 3가지 속도로 60초씩 7세트를 진행하였다. 리프팅 동작은 스쿼트(Squat) 와 스툽(Stoop) 자세를 각 30초씩 6세트 반복하여 측정하였다. 모든 세트 종료 후, 피험자에게 충분한 휴식 시간을 제공하였다. 이렇게 획득한 데이터를 훈련(Training), 검증(Validation), 시험(Test) 데이터셋으로 6 : 2 : 2의 비율로 분할하여 알고리즘 학습 및 성능 평가에 활용하였다.
Table 1Participant anthropometric data summary
Table 1
|
|
Height [cm] |
Weight [kg] |
|
Subject A |
178 |
78 |
|
Subject B |
172 |
77 |
|
Subject C |
176 |
65 |
|
Subject D |
174 |
70 |
|
Subject E |
175 |
72 |
4.2 학습 모델 성능 평가
수집된 고관절 시계열 데이터를 기반으로 CNN 기반 동작 분류 모델을 구성하였으며, MATLAB의 Deep Learning Toolbox를 활용해 학습을 수행하였다. 학습은 총 300 epoch 동안 진행되었으며, 각 Iteration마다 검증(Validation) 데이터셋을 사용하여 모델의 학습 정확도 및 일반화 성능을 동시에 평가하였다.
Fig. 6은 학습 과정에서의 loss 감소 및 정확도 향상 추이를 로그 스케일로 나타낸 결과이다. 학습이 진행됨에 따라 loss는 안정적으로 감소하고, Accuracy는 점진적으로 증가하는 양상을 보이며, 학습 안정성과 수렴성을 모두 확보하였다.
Fig. 6Learning curve of the deep neural network
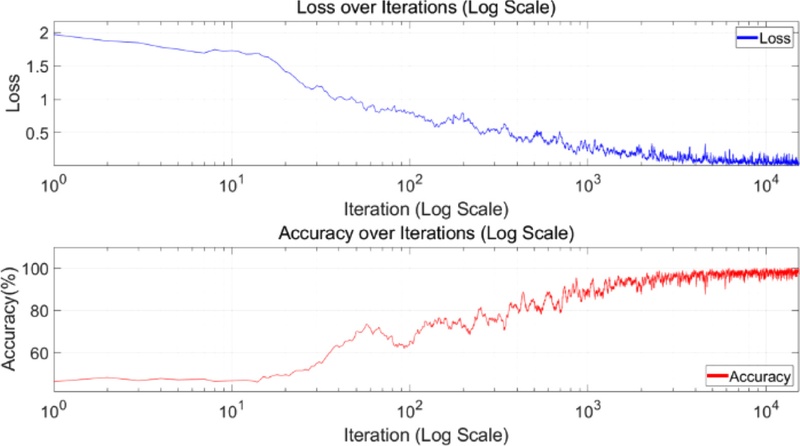
학습 결과, 최종 검증 정확도는 99.48%, 테스트 정확도는 평균 98.76%로 나타났다. 검증 정확도는 학습 정확도보다 낮은 수치를 유지하며, 과적합(Overfitting) 현상이 억제되었음을 확인할 수 있었다.
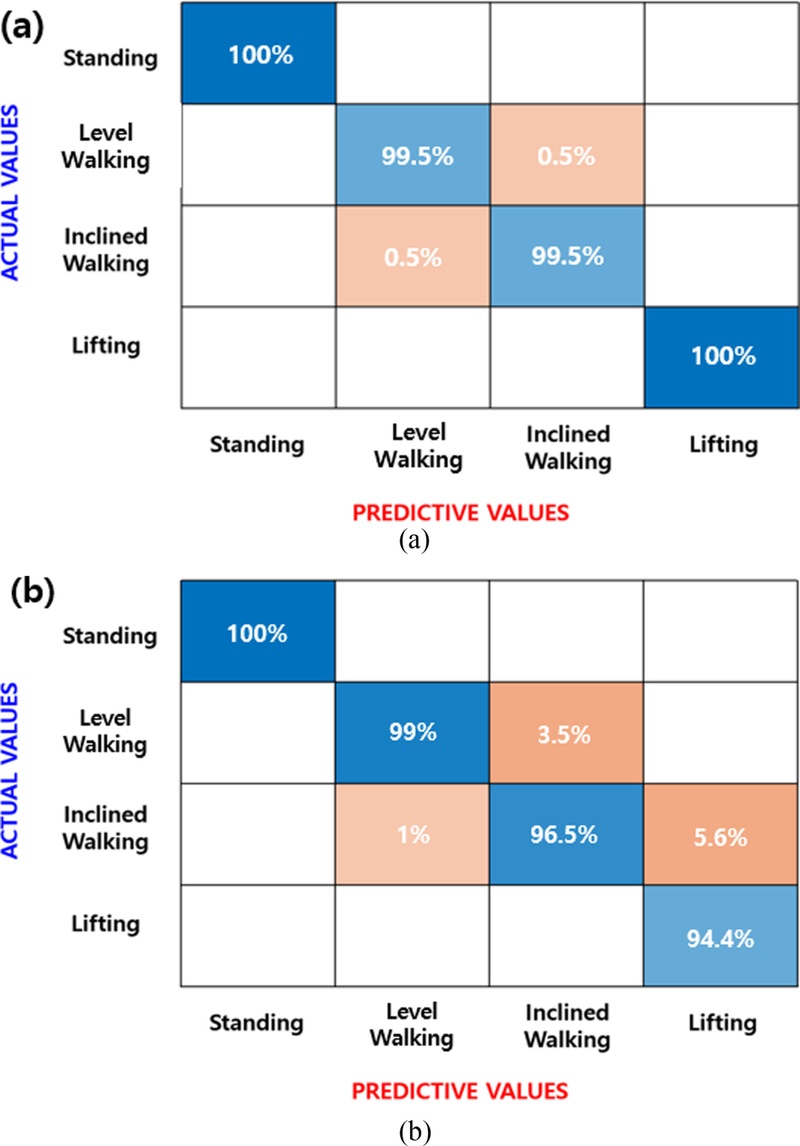
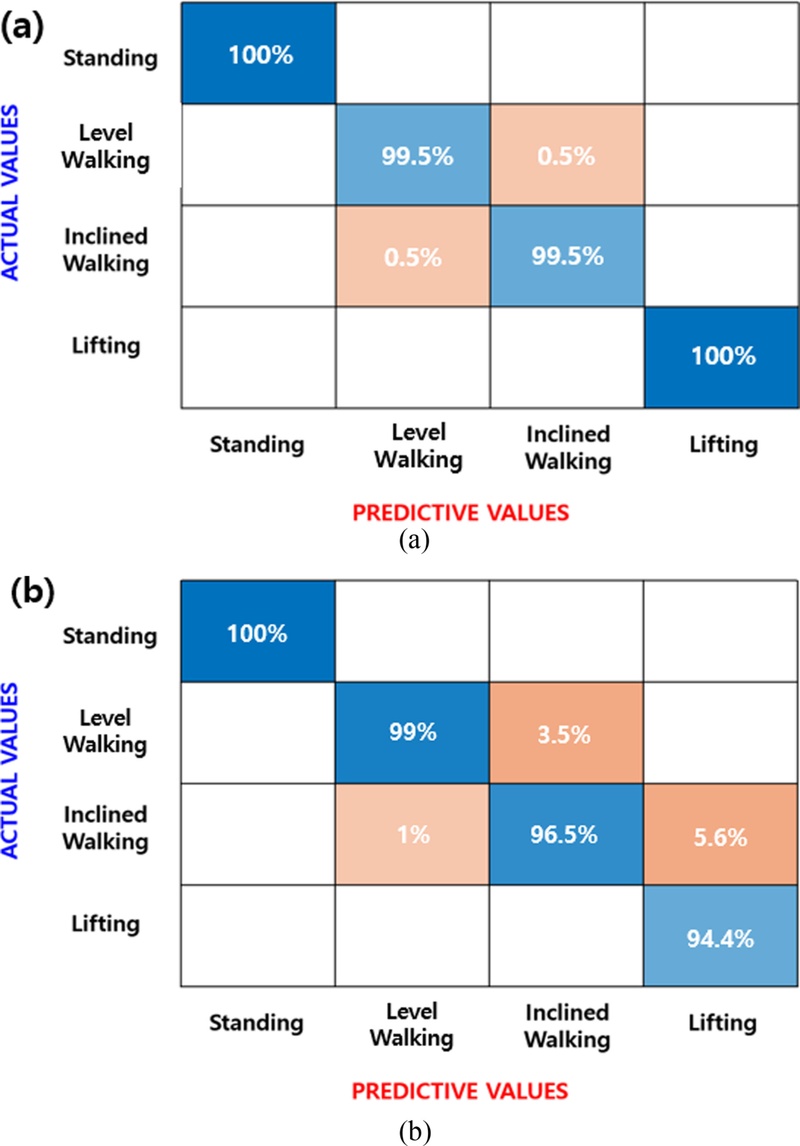
동작 분류 정확도는 Confusion Matrix를 통해 보다 정량적으로 분석되었다.
Fig. 7(a)는 학습 데이터에 대한 분류 결과로, 모든 클래스에서 99% 이상의 높은 정확도를 기록하며 매우 우수한 분류 성능을 나타냈다. Confusion Matrix를 보았을 때, 평지보행과 경사보행 사이의 0.5% 수준의 오분류가 관찰되었다.
Fig. 7Confusion matrix (a) the proposed CNN model (Offline validation) and (b) real-time motion classification using the proposed CNN
그러나 본 연구는 피험자 수가 5명에 불과하고, 동작 종류 또한 정지, 평지보행, 경사보행, 리프팅의 4가지로 한정되어 있어 학습 데이터의 다양성 측면에서 한계를 가진다. 피험자 간 보행 스타일이나 체형 차이, 보행속도, 지면상태 등 다양한 환경 조건에 대한 변수가 충분히 반영되지 않아, 특정 동작에 과적합될 가능성이 존재하며 이는 실제 적용 시 일반화 성능에 영향을 줄 수 있다.
이러한 한계를 보완하기 위해, 본 연구에서는 다음과 같은 과적합 억제 및 일반성 확보 전략을 적용하였다. 첫째, CNN의 각 주요 계층에 0.5의 Dropout(학습 시 무작위로 50%의 뉴런을 비활성화)과 Batch Normalization을 적용하여 학습 과정 중 과적합을 사전에 방지하였다. 둘째, 학습에 사용되지 않은 독립된 시험 데이터(Test Set)를 활용하여, 실제 환경에서의 동작 인식 성능을 검증하였다.
향후 연구에서는 다양한 연령대, 체형, 보행 습관을 갖춘 피험자들을 포함한 데이터셋을 구성하고, 작업 환경 및 일상생활을 포함한 보다 폭넓은 동작을 실험에 포함시켜 모델의 일반화 성능을 체계적으로 향상시킬 예정이다.
4.3 실제 동작 인식 분류 결과
학습된 CNN 모델을 이용하여 실제 동작 상황에서 실시간으로 모델의 정확도를 평가하였다.
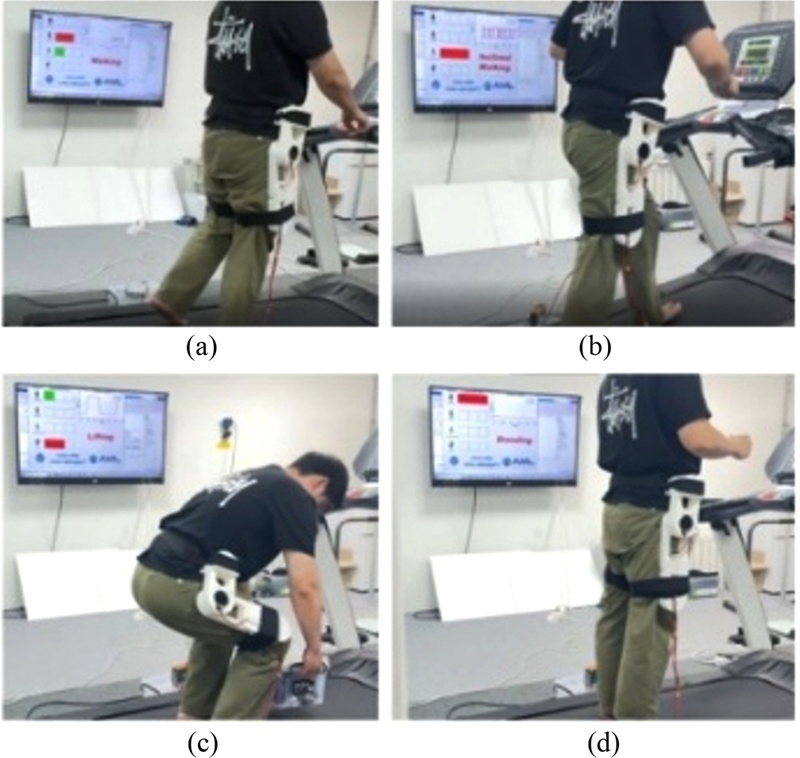
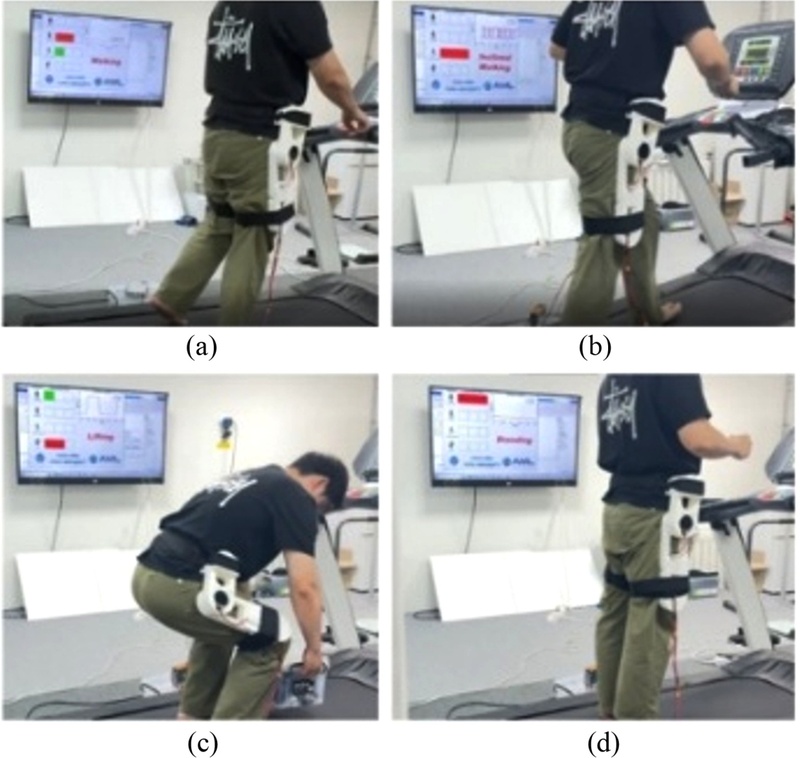
Fig. 8와 같이 피험자가 고관절 외골격을 착용한 상태에서 정지, 평지보행, 경사보행, 리프팅 총 4가지 동작을 수행하였다. 경사로의 각도는 15°로 설정하였으며, 평지보행과 경사보행의 속도는 2.4-4.8 km/h 범위에서 임의로 변화시켜 실험을 진행하였다. 리프팅 동작은 스쿼트(Squat)와 스툽(Stoop) 자세를 임의로 반복 수행하였다.
Fig. 8Realtime experiment (a) Level Walking, (b) Inclined Walking, (c) Lifting, and (d) Standing
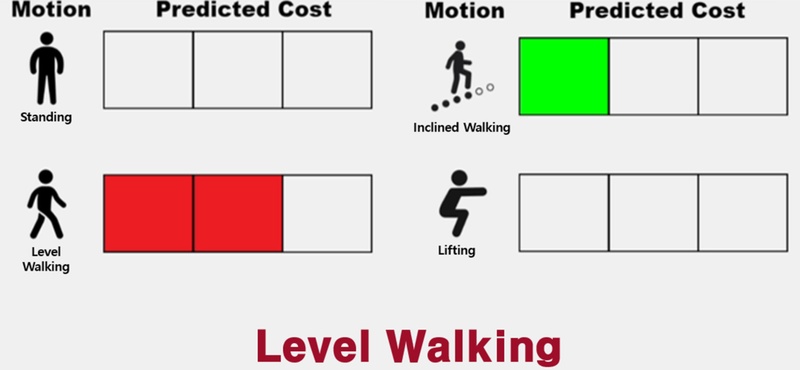
실시간 동작 인식 결과는
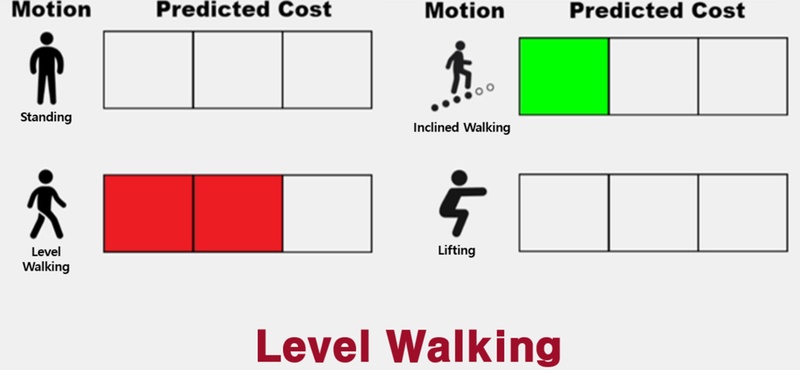
Fig. 9와 같이 MATLAB App Designer를 이용하여 시각적으로 표현되었으며,
Fig. 7(b)는 동작 인식 결과를 Matrix 형태로 나타낸 것이다. 학습 모델의 Confusion Matrix와 유사하게 평지보행과 경사보행 간 오분류가 소폭 발생하였다. 반면 리프팅 동작과 경사보행 간의 혼동이 5.6%로 확인되었다. 이는 경사보행 중 경사각에 의해 고관절의 굴곡 각도가 오프셋(Offset)되는 현상이 리프팅 동작 초기의 각도와 유사하기 때문으로 해석된다.
Fig. 9Visualization using Matlab App designer
제안된 알고리즘은 슬라이딩 윈도우 구조를 적용하여 초기 동작 인식에는 약 0.75초가 소요되었으나, 동작 전환 시에는 0.5초, 동작 유지 시에는 0.25 초의 인식 속도를 보였다. 슬라이딩 윈도우 최대 알고리즘의 유효성을 정량적으로 평가하기 위해, 단일 슬라이딩 윈도우 기반의 예측 결과와 비교 실험을 수행하였다.
단일 윈도우 기반 예측의 경우 평균 정확도는 약 85.2%였으며, 제안한 슬라이딩 윈도우 최대 알고리즘을 적용한 경우 정확도가 97.48%로 향상되었다. 단일 슬라이딩 윈도우 방식은 한 순간의 예측 결과만을 기준으로 분류를 결정하기 때문에, 동작이 변화하는 구간에서 정확한 인식이 어려운 단점이 있다. 반면, 본 연구에서 적용한 슬라이딩 윈도우 최대 알고리즘은 이전 프레임의 추세를 반영하여 보다 안정적인 예측을 가능하게 하며, 외란 및 노이즈에 대한 강건성을 높이는 데 기여한다. 이는 알고리즘이 일시적인 오분류를 효과적으로 완화하고 전체적인 동작 인식 성능을 개선함을 나타낸다.
반면, 해당 알고리즘은 동작전환 시 비교적 높은 지연속도를 보인다. 이는 즉각적인 반응을 요구하는 상황에서는 제한 요소가 될 수 있다. 이를 개선하기 위해 CNN 경량화(예: 1D-CNN, MobileNet 구조) 및 슬라이딩 윈도우 프레임 수 최적화, 하드웨어 연산 속도 개선을 통한 딥러닝 추론 시간 단축 등 다양한 최적화 방안을 고려할 수 있다. 또한 본 연구에서는 슬라이딩 윈도우 간 오버랩(Overlap)을 적용하지 않았으나, 향후 연구에서는 윈도우 간의 중첩을 적용함으로써 동작 전환 구간에서의 예측 지연(Latency)을 줄이고, 더욱 즉각적인 반응을 유도할 수 있을 것으로 기대된다.
5. 결론 및 향후 계획
본 연구에서는 고관절 외골격 시스템의 실시간 동작 인식을 위한 CNN 기반 딥러닝 알고리즘을 제안하고, 엔코더 단일 센서 기반의 데이터 취득 및 처리 방법을 적용하여 외골격 시스템을 설계하고 구현하였다. 기존 연구들이 다양한 센서를 결합하여 동작을 인식하는 방식에 집중한 반면, 본 연구에서는 QDD 모터에 내장된 엔코더만을 활용하여 동작 데이터를 획득하고, 이를 딥러닝 기반 알고리즘으로 분류함으로써 센서 구성을 간소화하면서도 높은 분류 정확도를 달성하였다.
실험 결과, 제안된 CNN 기반 동작 인식 모델은 기존의 ANN 및 LSTM 기반 모델 대비 우수한 성능을 보였으며, 오프라인 검증에서 99.48%, 실시간 실험에서 97.48%의 높은 분류 정확도를 기록하였다. 또한, 슬라이딩 윈도우 최대 알고리즘을 도입하여 일시적인 신호 변화로 인한 오분류를 최소화하고, 실시간 환경에서의 강건한 동작 인식을 가능하게 하였다.
해당 실험 결과를 보았을 때, 경사보행과 리프팅 동작 간 각도 측면에서의 유사성으로 인한 오분류, 실시간 응답 속도의 제한, 데이터 불균형 문제, 환경 변화에 대한 적응성 부족과 같은 한계점이 존재한다. 이를 해결하기 위해서는 다중 센서 데이터를 융합한 동작 인식 방법을 적용하고, 다양한 환경에서도 안정적인 성능을 유지할 수 있도록 모델의 일반화 능력을 향상시킬 필요가 있다.
향후 연구에서는 첫째, 보다 다양한 동작 환경과 피험자를 대상으로 데이터 수집을 진행하여, 제안된 알고리즘의 일반화 성능을 더욱 검증할 계획이다. 둘째, 외골격 시스템의 보조 토크 제어 알고리즘과 연계하여 동작 인식 결과를 실시간 제어에 적용함으로써 사용자 맞춤형 보조 기능을 구현할 계획이다. 선행 연구를 보았을 때, 임피던스 제어 및 적응형 제어 등의 기법을 활용하여 사용자의 의도에 따른 적절한 토크를 실시간으로 제공한다. 임피던스 제어는 사용자의 움직임에 따라 외골격이 자연스럽게 반응하도록 힘-위치 관계를 조절하는 기법이며, 기존 연구에서 임피던스 제어를 통해 사용자 의도를 정밀하게 반영하는 방식이 제안된 바 있다[
9]. 이러한 보조 제어 전략을 적용함으로써, 착용자의 피로도를 최소화하고 최적의 동작 보조 효과를 달성할 수 있을 것으로 기대된다.
제안된 동작인식 방법은 고관절 외골격 시스템의 실용성을 극대화하고, 재활 및 산업 현장에서의 적용 가능성을 더욱 확대할 것으로 기대된다.
ACKNOWLEDGMENTS
This study was supported by the Ajou University.
REFERENCES
- 1.
Kapsalyamov, A., Jamwal, P. K., Hussain, S., Ghayesh, M. H., (2019), State of the art lower limb robotic exoskeletons for elderly assistance, IEEE Access, 7, 95075-95086.
10.1109/ACCESS.2019.2928010
- 2.
Daliri, M., Ghorbani, M., Akbarzadeh, A., Negahban, H., Ebrahimzadeh, M. H., Rahmanipour, E., Moradi, A., (2024), Powered single hip joint exoskeletons for gait rehabilitation: A systematic review and meta-analysis, BMC Musculoskeletal Disorders, 25(1), 80.
10.1186/s12891-024-07189-4
- 3.
Alharthi, A. S., Yunas, S. U., Ozanyan, K. B., (2019), Deep learning for monitoring of human gait: A review, IEEE Sensors Journal, 19(21), 9575-9591.
10.1109/JSEN.2019.2928777
- 4.
Narayan, V., Awasthi, S., Fatima, N., Faiz, M., Srivastava, S., (2023), Deep learning approaches for human gait recognition: A review, Proceedings of the 2023 International Conference on Artificial Intelligence and Smart Communication, 763-768.
10.1109/AISC56616.2023.10085665
- 5.
Yuan, W., Zhang, L., (2018), Gait classification and identity authentication using CNN, Proceedings of the Asian Simulation Conference, 119-128.
10.1007/978-981-13-2853-4_10
- 6.
Zhao, B., Lu, H., Chen, S., Liu, J., Wu, D., (2017), Convolutional neural networks for time series classification, Journal of Systems Engineering and Electronics, 28(1), 162-169.
10.21629/JSEE.2017.01.18
- 7.
Seo, K., (2023), Real-time estimation of walking speed and stride length using an imu embedded in a robotic hip exoskeleton, Proceedings of the 2023 IEEE International Conference on Robotics and Automation, 12665-12671.
10.1109/ICRA48891.2023.10160770
- 8.
Foroutannia, A., Akbarzadeh-T, M.-R., Akbarzadeh, A., (2022), A deep learning strategy for emg-based joint position prediction in hip exoskeleton assistive robots, Biomedical Signal Processing and Control, 75, 103557.
10.1016/j.bspc.2022.103557
- 9.
Huo, W., Moon, H., Alouane, M. A., Bonnet, V., Huang, J., Amirat, Y., Vaidyanathan, R., Mohammed, S., (2021), Impedance modulation control of a lower-limb exoskeleton to assist sit-to-stand movements, IEEE Transactions on Robotics, 38(2), 1230-1249.
10.1109/TRO.2021.3104244
Biography
- Min-Ho Seo
M.S. in the Department of Mechanical Engineering, Ajou University. His research interest is wearable robots.
- Byeong-Hoon Bang
M.S. in the Department of Mechanical Engineering, Ajou University. His research interest is wearable robot.
- Dong-Youn Kuk
M.S. in the Department of Mechanical Engineering, Ajou University. His research interest is wearable robots.
- Sung Q Lee
Professor in the Department of Mechanical Engineering, San Diego State University. His research interest is MEMS microphones, sound field security sensors, sound source localization.
- Young-Man Choi
Professor in the Department of Mechanical Engineering, Ajou University. His research interests are high-precision machines and wearable mechatronics.