ABSTRACT
This study examines how two key design parameters—the pre-stretch ratio and the thickness of the carbon nanotube (CNT) electrode—affect the actuation performance of dielectric elastomer actuators (DEAs). DEA samples are created with varying pre-stretch levels (50% and 125%) and different amounts of CNT spray coating (4 and 8 mg), and their threshold voltages and areal strains are quantitatively assessed. The experimental results indicate that higher pre-stretch ratios result in lower threshold voltages and greater areal deformations, while increased CNT thickness typically reduces actuator deformation due to enhanced mechanical stiffness. The combination of a high pre-stretch ratio and low CNT loading demonstrates improved electro-mechanical responsiveness at moderate voltages. These findings underscore the interconnected effects of structural and electrode design on DEA performance, offering practical design guidelines for optimizing soft actuator systems. This research lays a solid foundation for future applications of DEAs in haptic interfaces, wearable actuators, and soft robotics.
-
KEYWORDS: Dielectric elastomer actuator, Carbon nanotube electrode, Pre-stretch, Electromechanical deformation, Spray coating, Haptic interface
-
KEYWORDS: 유전 탄성체 구동기, 탄소 나노튜브 전극, 사전 인장, 전자기계적 변형, 스프레이 코팅, 햅틱 인터페이스
1. 서론
햅틱 인터페이스 기술은 사용자의 촉각을 자극하여 물리적 상호작용의 사실성을 증대시키는 핵심 기술로서, 원격 조작, 가상현실, 의료 시뮬레이션, 착용형 피드백 시스템 등 다양한 분야에서 활용되고 있다[
1-
4]. 특히 인체와 직접 접촉하거나 착용 가능한 햅틱 장치는 높은 유연성, 경량성, 빠른 응답 특성, 그리고 에너지 효율성이 요구되며[
5,
6], 이러한 요구를 충족시키기 위한 구동 기술로서 유전 탄성체 구동기(Dielectric Elastomer Actuator, DEA)가 주목받고 있다[
7,
8].
DEA는 고분자 유전체층의 양면에 전극을 형성한 구조로, 고전압 인가 시 전기장에 의해 유전층이 얇아지고 수평 방향으로 팽창하는 전기기계적 변형을 나타낸다. DEA는 단순한 구조, 우수한 신축성 등의 장점으로 인해 기존의 전자기 구동기를 대체할 수 있는 차세대 유연 액추에이터로 간주된다. 특히 다양한 형상 설계가 가능하며, 고주파 입력에 대해서도 빠르고 부드러운 변위를 구현할 수 있어 인공근육, 웨어러블 장치, 소프트 로봇, 촉각 디스플레이 등에 폭넓게 적용되고 있다[
9,
10].
DEA의 구동 성능은 주로 문턱 전압(Threshold Voltage), 최대 변위, 응답 속도 등의 지표로 평가되며, 이러한 성능은 유전층의 재료 특성 및 두께, 사전 인장률(Pre-stretch Ratio), 전극의 기계적 유연성 및 전기 전도도 등에 의해 결정된다[
11]. 이 중 사전 인장률은 DEA의 유전층 두께 및 초기 장력을 동시에 조절할 수 있는 변수로, 인장률이 증가할수록 유전층이 얇아져 정전기 압력이 증가하고, 이에 따라 동일 전압에서 더 큰 변위가 발생하는 경향이 있다. 반면, DEA 전극은 유전층에 전기장을 인가하는 기능 외에도 DEA의 전체적인 기계적 유연성과 순응성에 직접적인 영향을 미친다. 특히 전극의 두께 및 강성은 DEA의 구동 효율성에 크게 작용하며, 두꺼운 전극은 오히려 DEA의 변형을 제한하고 문턱 전압을 상승시키는 요인으로 작용할 수 있다.
최근에는 카본 그리즈, 그래핀, 액체금속 등 다양한 전극 소재가 제안되어 왔으며[
12], 이 중 탄소 나노튜브(Carbon Nanotube, CNT)는 높은 전기전도도, 유연성, 화학적 안정성, 그리고 간편한 분산 및 도포 특성으로 인해 유연 전극용 재료로 각광받고 있다[
13-
15]. 특히 스프레이 코팅(Spray Coating) 공정은 CNT를 유전체 표면에 정밀하게 코팅할 수 있어, 전극 형상 제어 및 두께 조절에 유리한 방법으로 활용되고 있다[
16]. 본 연구에서는 햅틱 인터페이스용 DEA 설계를 위한 기초연구로서, 서로 다른 사전 인장률(50% 및 125%)과 CNT 도포량(4 및 8 mg)을 변수로 설정하고, 스프레이 코팅 공정을 통해 전극을 형성한 DEA 시편을 제작하였다. 이후, 레이저 공초점 현미경을 통해 전극 두께를 측정하고, DEA의 문턱 전압 및 인가 전압에 따른 변위를 실험적으로 분석함으로써 전극 강성과 사전 인장률의 상호작용이 구동 성능에 미치는 영향을 정량적으로 고찰하였다. 본 연구는 향후 저전력·고효율 햅틱 디바이스 구현을 위한 DEA 구조 최적화 설계에 기초자료로 활용될 수 있으며, 스프레이 기반 CNT 전극 공정의 기술적 유효성을 정량적으로 제시한다는 데 의의가 있다.
2. 실험 방법
2.1 DEA 설계 및 제작
본 연구에서는 전극의 두께와 유전층의 사전 인장률에 따른 구동 특성을 정량적으로 분석하기 위해 총 4종의 DEA를 설계하고 제작하였다. DEA의 제작 공정은
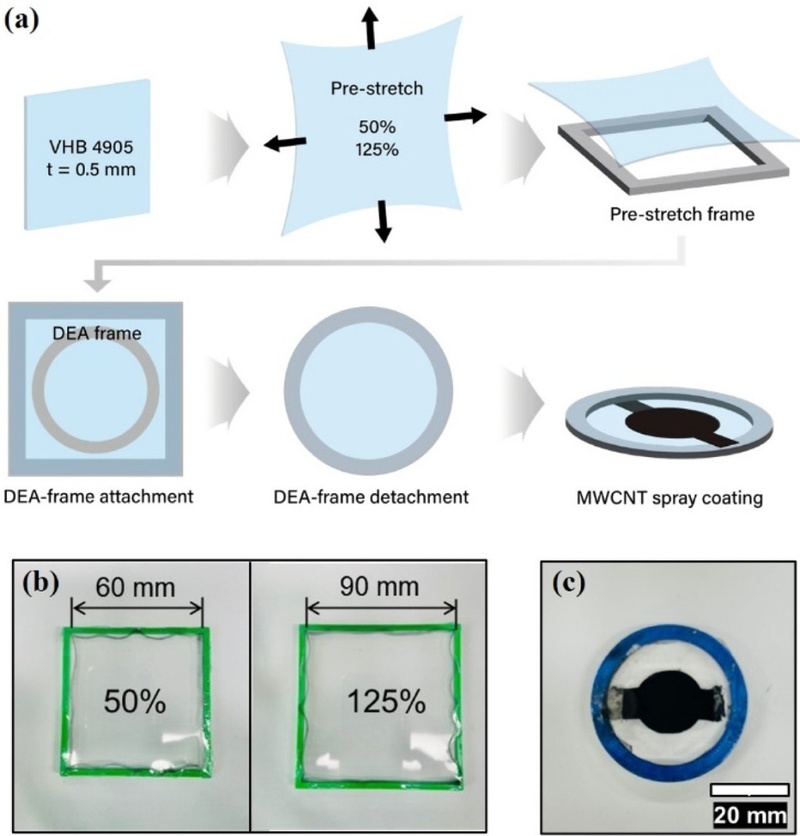
Fig. 1(a)에 나타나 있으며, 유전층의 인장, 프레임 결합, 전극 코팅의 세 단계로 구성된다. 유전층 재료로는 상용 폴리아크릴계 점착 필름인 VHB 4905(3M사, 두께 0.5 mm)를 사용하였으며, 이를 정사각형으로 재단한 후, 중심부에 원형 개구부를 갖는 DEA 프레임에 부착하였다. DEA 프레임은 3D 프린팅 방식으로 제작된 폴리락타이드(Polylactic Acid, PLA) 재질을 사용하였으며, 인장 프레임과 DEA 프레임은 각각 별도로 설계되었다. 두 가지 인장률 조건을 적용하기 위해, 각각 60 × 60 mm
2 (50% 인장률) 및 90 × 90 mm
2 (125% 인장률) 크기의 사각형 인장 프레임을 이용하였다.
Fig. 1(b)와 같이, 유전층은 사방으로 균일하게 인장된 상태에서 프레임에 고정되었고, 이후 DEA 프레임으로 치환하여 둥근 유전층이 유지되도록 제작되었다.
Fig. 1(a) Schematic illustration of the DEA fabrication process, (b) Top-view images of the pre-stretched elastomer layers with different pre-stretch ratios (50% and 125%), and (c) Photograph of the fully assembled DEA with CNT electrodes
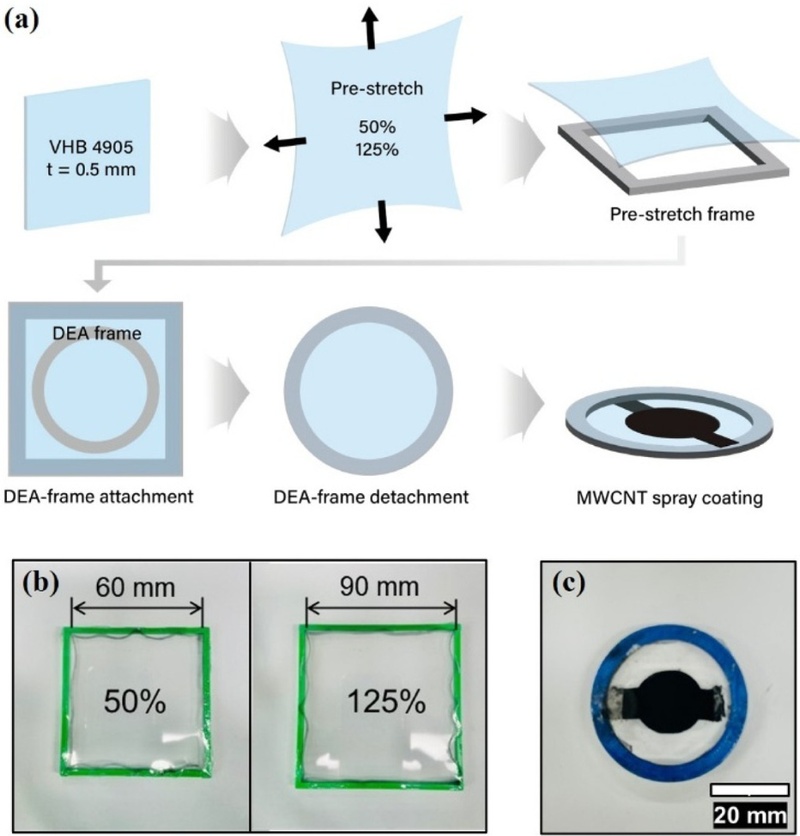
전극 형성에는 다중벽 CNT (Multi-walled CNT, MWCNT)를 클로로포름에 0.1 wt%로 분산시킨 용액을 사용하였다. 준비된 용액은 초음파 균질기를 통해 충분히 분산시킨 후, 스프레이 코팅 방식을 이용하여 유전층의 양면에 도포하였다. 이때, 전극 형성에 사용된 CNT의 도포량은 동일 농도에서의 분산액 총량을 기준으로 하여 4 및 8 mg 조건으로 구분하였다. 해당 도포량은 실제 전극 내에 잔류한 CNT 질량이 아닌, 전체 면적에 도포된 용액의 기준량이다. 사전 실험 결과, 도포량이 4 mg 미만일 경우에는 CNT가 전극 표면에 불균일하게 형성되는 현상이 나타났고, 8 mg을 초과하면 전극이 지나치게 두꺼워져 기계적 강성이 증가하며 DEA 구동 성능이 현저히 저하되었다. 이러한 결과를 바탕으로 본 연구에서는 4 및 8 mg 조건을 실험적으로 적절한 비교 조건으로 설정하였다. 스프레이 코팅이 완료된 후에는 CNT 전극 표면에 전도성 카본 그리즈를 얇게 도포한 뒤, 외부 전원 연결을 위한 구리 테이프를 부착하여 전기적 접속을 완료하였다.
Fig. 1(c)는 완성된 DEA 시편의 외형을 나타내며, 중심부 원형에 CNT 전극이 형성되어 있음을 확인할 수 있다. 본 공정을 통해 전극 강성과 사전 인장률을 독립적으로 제어할 수 있는 DEA 구조를 구현하였으며, 이후 다음 장에서 제시하는 실험 환경에서 정량적 구동 평가를 수행하였다.
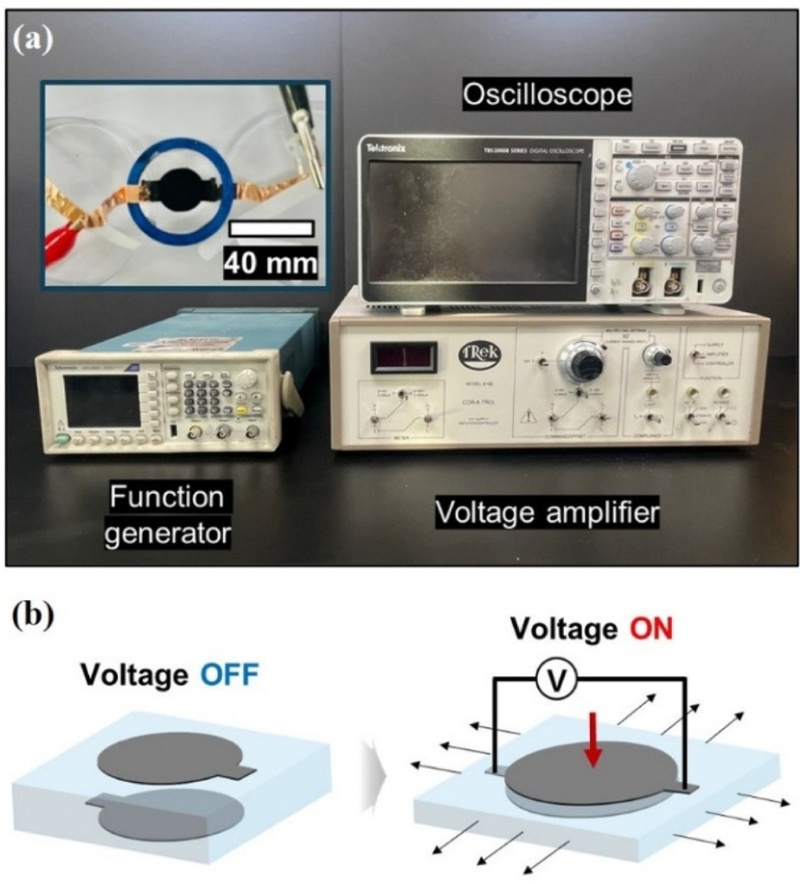
DEA의 구동 특성을 정량적으로 평가하기 위하여
Fig. 2(a)에 나타낸 바와 같이 함수발생기, 고전압 증폭기, 그리고 오실로스코프로 구성된 측정 시스템을 사용하였다. DEA는 테플론 시트 위에 고정된 상태로 측정되었으며, 구동 전압 인가 및 전극 연결은 카본 그리즈와 구리 테이프를 통해 이루어졌다. 함수발생기를 통해 전압 신호를 생성하였으며, 이 신호는 고전압 증폭기를 통해 최대 ±7 kV까지 증폭되었다. 증폭된 전압은 DEA 상·하부 전극에 인가되어 유전층에 전기장을 형성하였고, 이에 따른 DEA의 기계적 변형이 유도되었다. 구동 중 전압 크기 및 파형은 오실로스코프를 이용하여 실시간으로 확인하였다.
Fig. 2(a) Experimental setup for DEA actuation tests, consisting of a function generator, high-voltage amplifier, and oscilloscope. Inset shows the connected DEA sample, and (b) Schematic illustration of the DEA actuation principle under voltage OFF and ON states
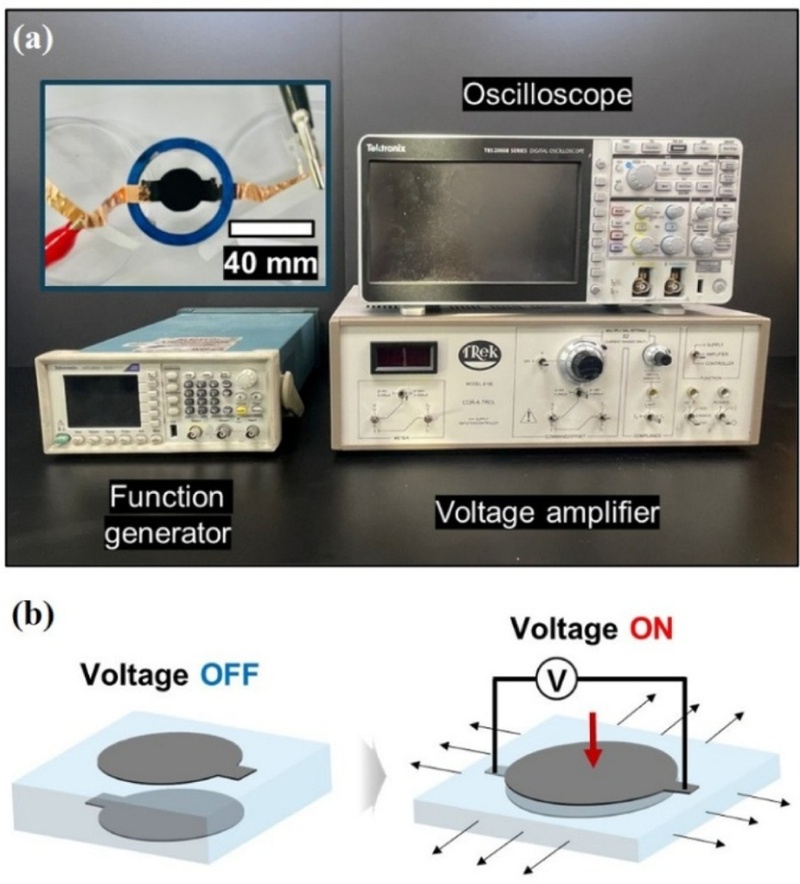
DEA의 구동 원리는
Fig. 2(b)에 도시된 바와 같이, 전압이 인가되었을 때 정전기력에 의해 유전층이 수직 방향으로 압축되면서 수평 방향으로 확장되는 전기기계적 변형에 기반한다. 전압이 없는 상태(OFF)에서는 원형 전극이 평평하게 유지되며, 전압 인가 시(ON)에는 DEA 중심부가 외측으로 팽창하는 방식으로 변형된다. DEA의 구동 특성은 각 인가 전압 조건에서 실시간으로 영상 촬영한 후, 촬영된 프레임을 캡처하고 영상 내 픽셀 간 거리 기준을 활용하여 정량적으로 분석되었다. 그러나 제작 공정상 상하 전극의 정렬 오차 등으로 인해 DEA의 팽창 변형은 완전한 원형이 아닌 타원형 형태로 발생하는 경향이 있었다. 이러한 비대칭성을 고려하여, 본 연구에서는 구동 성능을 단순 수평 변위가 아닌 면적 변형률(Area Strain) 기준으로 평가하였으며, 이를 통해 전압 인가에 따른 DEA의 최대 구동 성능과 문턱 전압을 보다 정량적이고 일관성 있게 도출할 수 있었다. 모든 실험은 실온 및 대기 환경에서 수행되었다.
한편, 스프레이 코팅된 CNT 전극의 두께는 전극의 기계적 강성이 DEA 성능에 영향을 줄 수 있으므로 별도로 측정하였다. 이를 위해 공초점 레이저 현미경을 사용하였으며, 전극이 도포된 영역과 비도포 영역 간의 높이 차이를 정량적으로 분석하여 각 도포량(4 및 8 mg)에 대응하는 전극 두께를 측정하였다.
3. 결과 및 고찰
3.1 전극 두께 및 표면 특성 분석
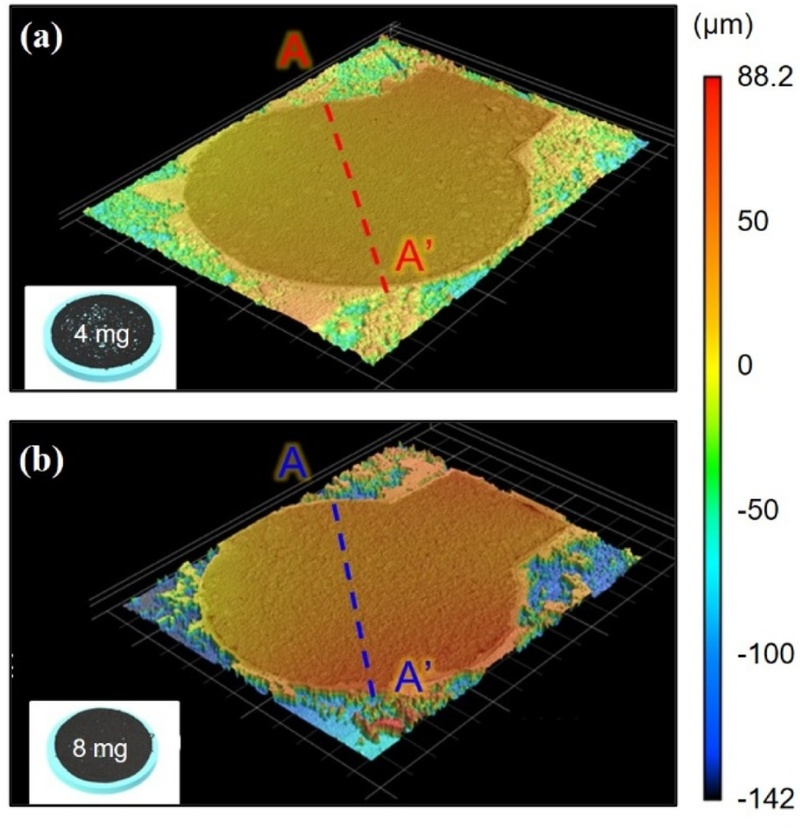
DEA의 전극은 전기적 전도성과 동시에 기계적 유연성을 갖추어야 하며, 전극의 두께 및 표면 형상은 DEA의 구동 특성에 직접적인 영향을 미칠 수 있다. 이에 따라 본 연구에서는 스프레이 코팅을 통해 형성된 CNT 전극의 두께 및 표면 조도 특성을 정량적으로 분석하였다.
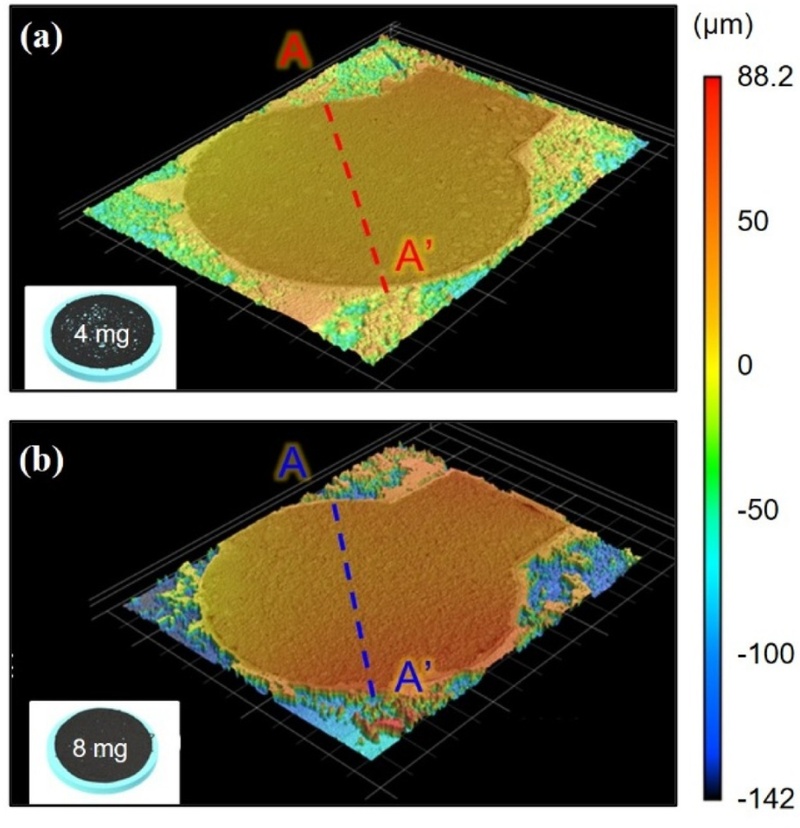
Figs. 3(a)와 3(b)는 각각 4 및 8 mg의 CNT를 도포한 전극의 공초점 레이저 현미경 이미지를 3차원 형상으로 나타낸 결과이다. 4 mg 도포 시에는 전극의 최대 높이가 약 50 μm 수준으로 비교적 균일한 코팅 형상을 나타내는 반면, 8 mg 도포 시에는 최대 높이가 150 μm에 근접하고 전체적으로 더 높은 표면 거칠기를 보였다. 이는 도포량 증가에 따라 전극의 기계적 강성이 증가할 가능성을 시사한다.
Fig. 33D laser confocal microscope images of CNT-coated electrodes prepared with (a) 4 and (b) 8 mg of CNT solution. The cross-sectional lines A-A′ indicate the regions used for height profile analysis
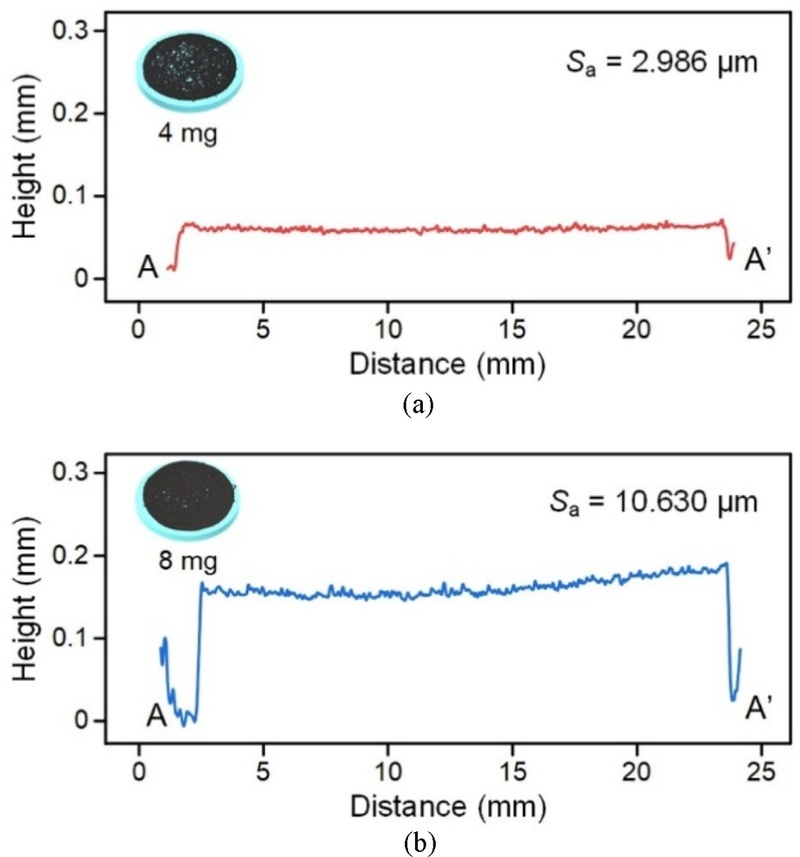
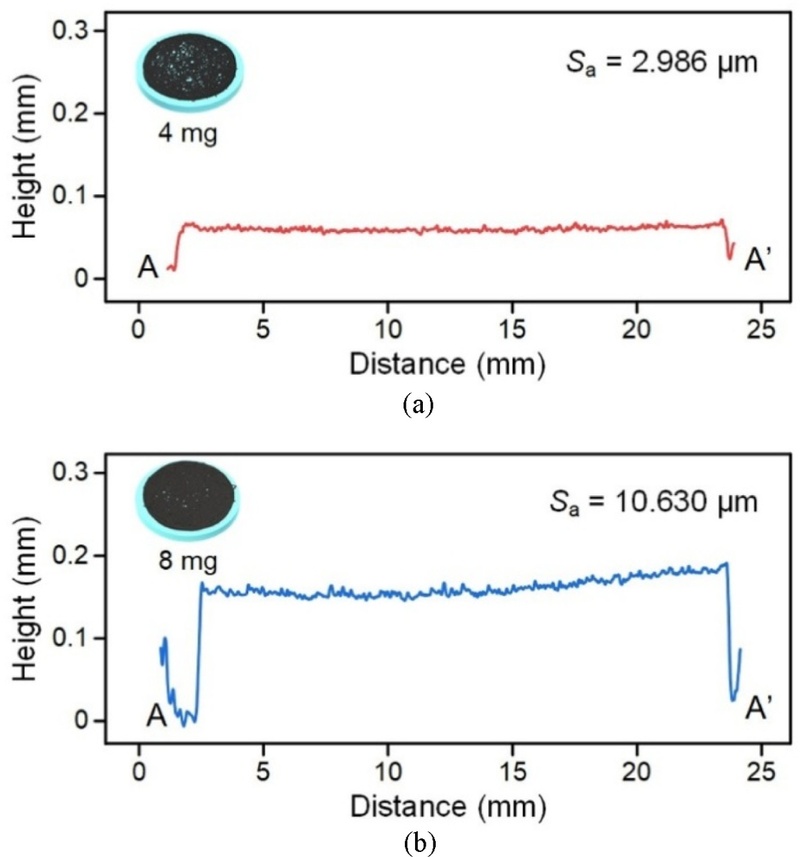
Figs. 4(a)와 4(b)는 각각 4 및 8 mg 도포 조건에서의 A–A′ 단면 높이 분포를 나타내며, 정량적 조도 파라미터로는 평균 조도(
Sa)가 계산되었다. 4 mg 조건의 경우
Sa = 2.986 μm로 상대적으로 매끄러운 표면을 유지하였으나, 8 mg 조건에서는
Sa = 10.630 μm로 크게 증가하였다. CNT 도포량이 증가함에 따라 전극의 두께뿐만 아니라 표면 형상 또한 불균일해지는 경향을 보이며, 이는 도포된 CNT의 농도가 증가하면서 입자 간 응집이 유도되고, 건조 과정에서의 용매 휘발 및 수축이 불균일하게 발생한 결과로 해석된다. 이러한 표면 불균일성과 두께 증가로 인해 전극의 기계적 강성이 상승하고, 이는 DEA의 자유로운 변형을 억제하여 구동 변위의 감소로 이어질 수 있음을 시사한다.
Fig. 4Height profiles along the A-A′ cross-sections of CNT electrodes shown in Fig. 3: (a) 4 mg-coated sample with an average surface roughness (Sa) of 2.986 μm and (b) 8 mg-coated sample with an Sa of 10.630 μm. Increased CNT deposition leads to higher surface irregularity and roughness
3.2 DEA의 구동 성능 분석
3.2.1 구동 전후 시각 비교
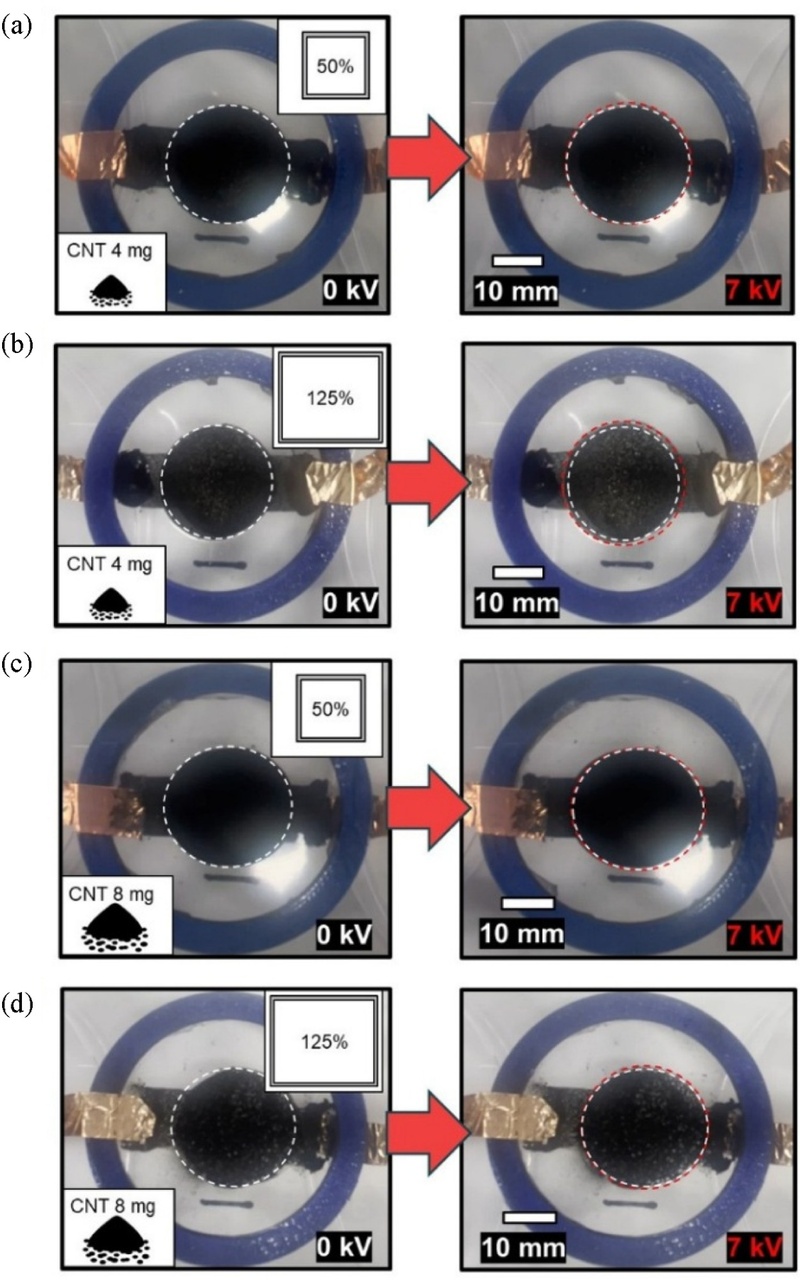
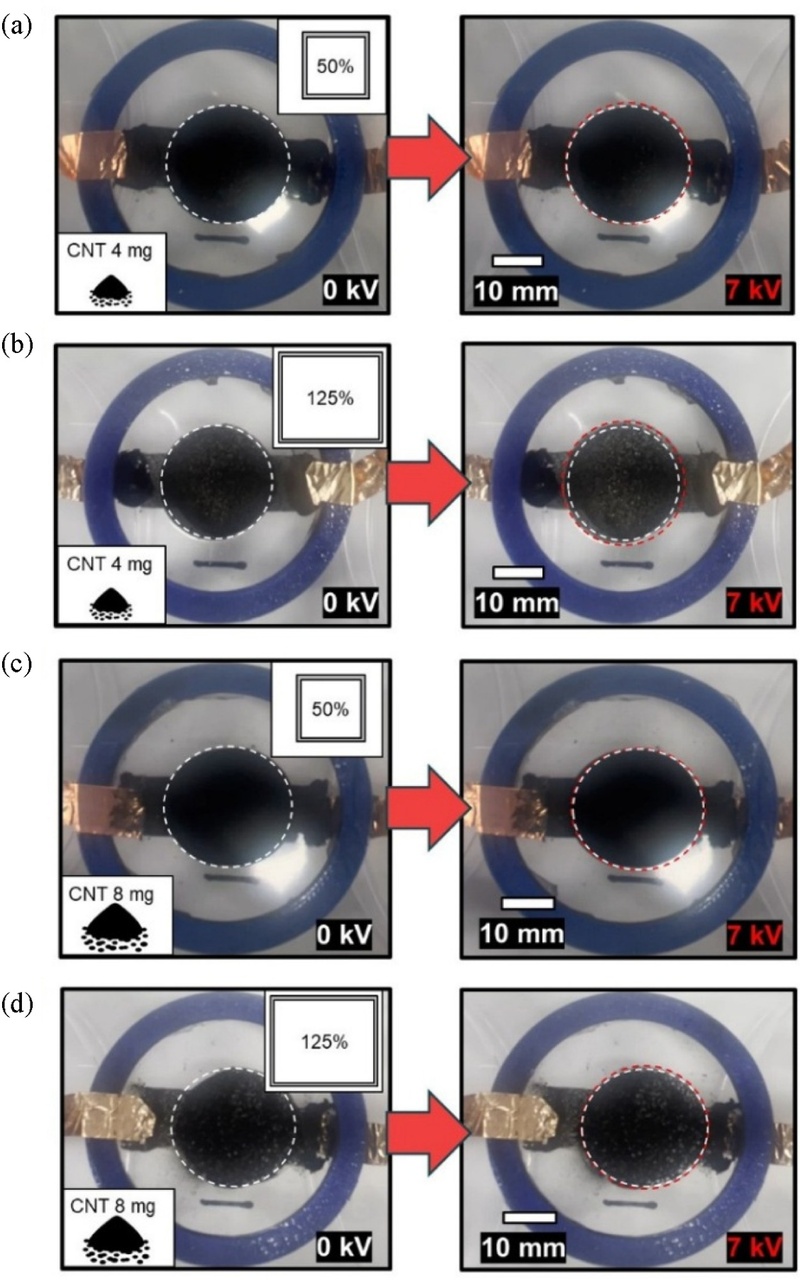
DEA의 시각적 구동 응답을 정성적으로 관찰하기 위하여, 서로 다른 사전 인장률(50% 및 125%)과 CNT 전극 도포량(4 및 8 mg)을 갖는 총 4종의 시편에 대해 구동 전(0 kV)과 후(7 kV)의 상태를 비교하였다.
Fig. 5는 각 조건에서 전극 중심 영역의 형상 변화를 나타낸 이미지로, 전압 인가에 따른 DEA의 팽창 동작을 직관적으로 확인할 수 있다. 전압이 인가되지 않은 상태에서는 중심부 CNT 전극이 정적으로 유지되며, 7 kV 전압 인가 시 모든 조건에서 중심 영역이 바깥쪽으로 팽창하는 모습을 확인할 수 있다. 사전 인장률이 높은 시편(
Figs. 5(b) 및 5(d))에서는 보다 넓은 팽창 범위를 나타내며, 이는 인장률 증가가 DEA의 구동 민감도를 향상시킴을 정성적으로 시사한다. 또한, CNT 도포량이 적은 경우(
Figs. 5(a) 및 5(b))에서 팽창이 더 용이하게 발생하는 경향이 관찰되었으며, 이는 전극의 기계적 유연성 유지가 DEA의 변형 성능에 기여할 수 있음을 시각적으로 보여준다.
Fig. 5Optical images of DEA samples before and after actuation at 7 kV. Each condition corresponds to a combination of pre-stretch ratio (50% or 125%) and CNT mass (4 or 8 mg): (a) 50% and 4 mg, (b) 125% and 4 mg, (c) 50% and 8 mg, (d) 125% and 8 mg. The red dashed circles indicate the expanded electrode area under applied voltage
3.2.2 문턱 전압 비교
DEA의 구동 특성을 평가함에 있어 가장 핵심적인 파라미터 중 하나는 문턱 전압으로, 이는 DEA가 가시적인 팽창을 시작하는 최소 인가 전압을 의미한다. 문턱 전압은 유전층 두께, 전극의 기계적 순응성, 초기 장력 등의 영향을 종합적으로 받는 파라미터로, 실제 응용에 있어 저전력 구동 가능성을 평가하는 주요 지표로 사용된다.
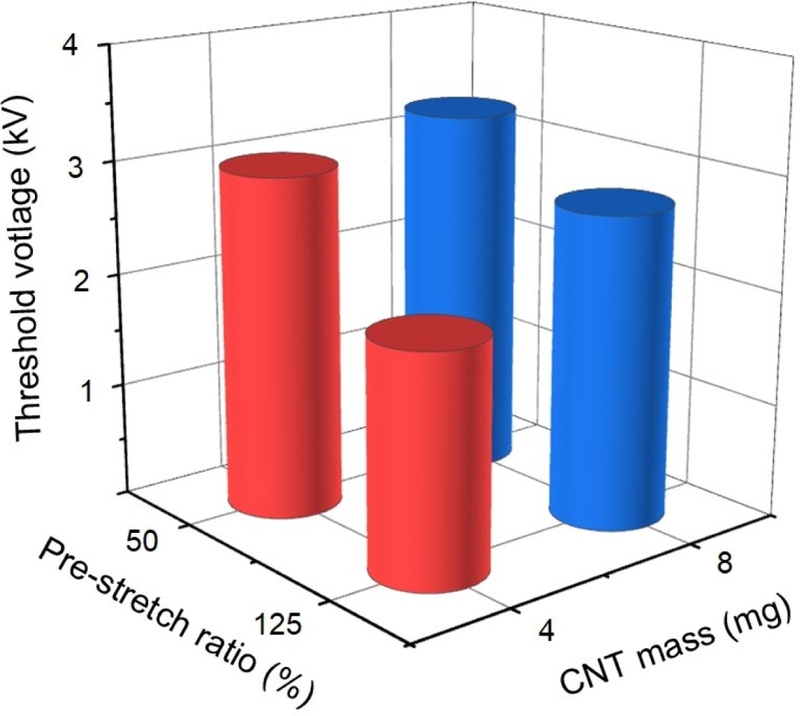
Fig. 6은 서로 다른 사전 인장률과 CNT 전극 도포량에 대해 측정된 DEA의 문턱 전압 값을 3차원 막대그래프로 나타낸 것 이다. 실험 결과, 모든 조건에서 사전 인장률이 증가할수록 문턱전압이 낮아지는 경향이 일관되게 나타났다. 이는 사전 인장에 따라 유전층의 두께가 감소하고, 이에 따라 동일한 인가 전압에 대해 유전층에 작용하는 정전기력이 증가하기 때문이다. DEA에 작용하는 정전기력
P는
P =
ε0εrV2/
d2으로 표현되며, 여기서
ε0은 진공의 유전율,
εr은 유전층 재료의 상대 유전율,
V는 인가 전압,
d는 유전층의 두께를 나타낸다. 이 식으로부터, 유전층이 얇을수록 정전기력이 제곱 비율로 증가하므로, 더 낮은 전압에서도 DEA의 팽창을 유도할 수 있다. 결과적으로, 높은 사전 인장률 조건에서는 문턱 전압이 감소하는 경향이 뚜렷하게 나타났다.
Fig. 63D bar graph of threshold voltages measured for DEA samples with different pre-stretch ratios and CNT masses. Higher pre-stretch ratios reduce the threshold voltage, while thicker CNT electrodes increase it due to enhanced mechanical stiffness
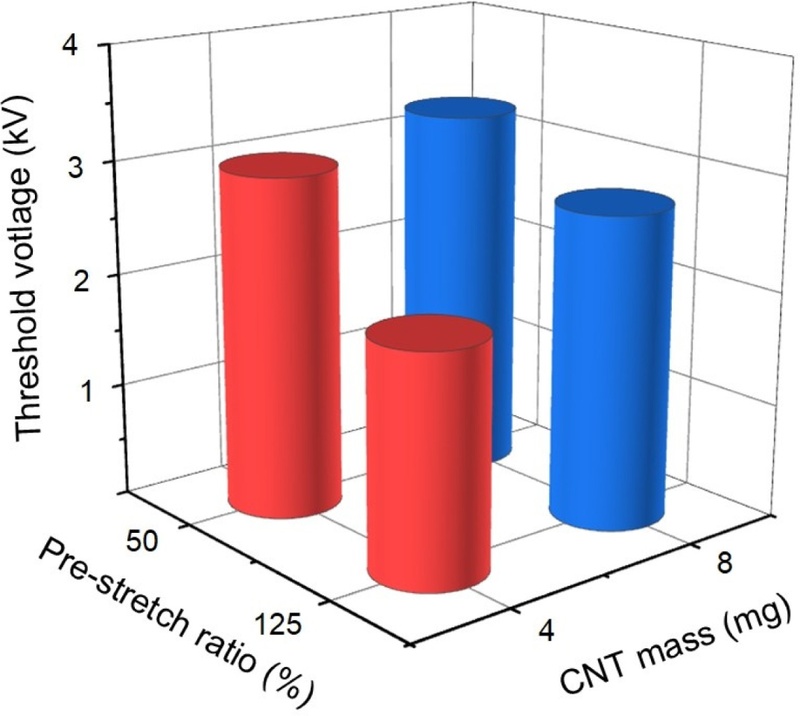
반면, CNT 도포량이 많아질수록 문턱 전압은 증가하는 양상을 보였다. 이는 앞서 확인한 전극의 두께 및 표면 조도 증가로 인한 기계적 강성 상승에 기인한 것으로 해석된다. 특히 8 mg 조건에서는 상대적으로 두껍고 표면이 거친 CNT 전극이 DEA의 압축 및 팽창을 저해함으로써 구동 시작 시점이 지연되었다. 이는 전극이 단순한 전기적 도전재 역할을 넘어 DEA의 기계적 응답성에도 직접적인 영향을 미침을 보여준다.
흥미롭게도, 두 변수 간의 상호작용 또한 관찰되었다. 고인장률 조건에서는 유전층이 얇아져 전기장이 집중되므로 일반적으로 구동이 용이하지만, 이 경우 CNT 전극층이 DEA 전체 구조에서 차지하는 비중이 커지며, 전극의 기계적 강성이 구동 변형을 더욱 제한하는 요소로 작용하게 된다. 그 결과 CNT 도포량이 많을수록 문턱 전압의 상승 폭이 오히려 더 크게 나타났으며, 이는 전극층이 구동 특성에 미치는 영향이 고인장률 조건에서 상대적으로 더 크게 나타났기 때문으로 해석된다. 따라서 문턱 전압을 최적화하기 위해서는 유전층의 기계적 설계와 전극의 물성 간의 균형이 필수적으로 고려되어야 함을 시사한다.
3.2.3 전압-변위 응답 분석
DEA의 실제 구동 성능을 정량적으로 평가하기 위해, 각 조건에서 인가 전압에 따른 중심 전극의 면적 변화를 영상 기반으로 측정하고, 이를 정규화하여 면적 변형률로 환산하였다.
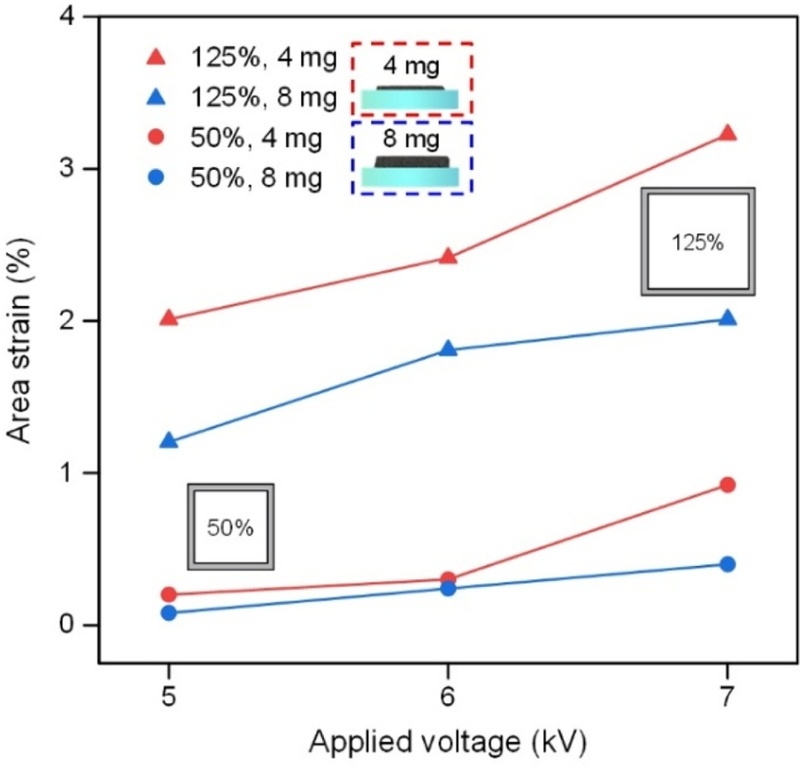
Fig. 7은 CNT 도포량과 사전 인장률의 조합에 따른 전압–변형률 곡선을 나타낸다. 각 곡선은 5.0부터 7.0 kV까지의 범위에서 측정된 평균 면적 변형률 값을 기준으로 작성되었으며, DEA의 민감도 및 최대 변형 수준을 비교할 수 있다.
Fig. 7Area strain of DEA samples measured as a function of applied voltage for four combinations of pre-stretch ratio and CNT electrode mass. DEA with 125% pre-stretch and 4 mg CNT showed the highest strain under 7.0 kV
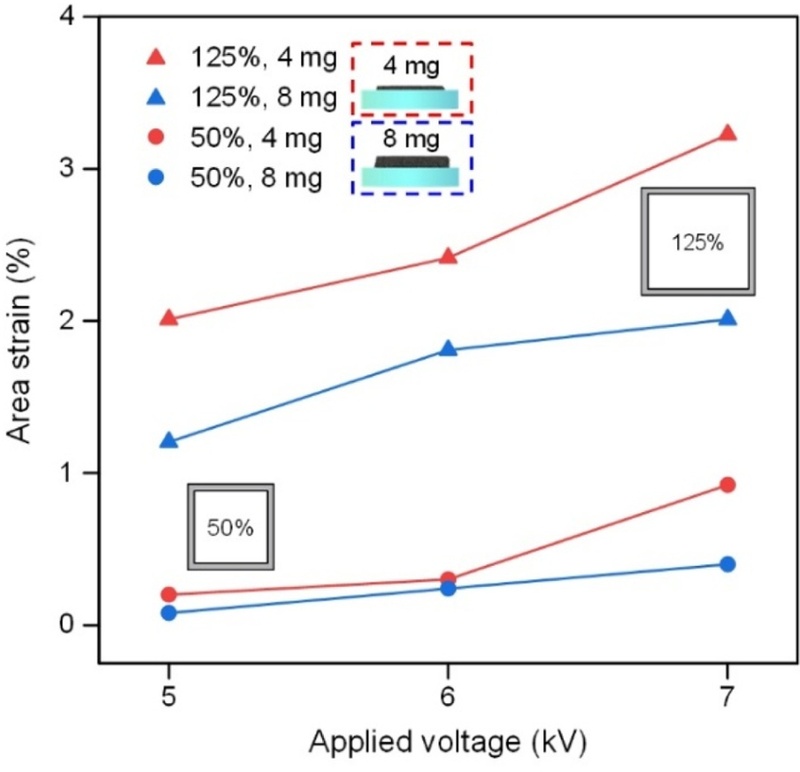
측정 결과, CNT 도포량이 적고 사전 인장률이 높은 조건(125%, 4 mg)에서 가장 높은 면적 변형률이 나타났으며, 7.0 kV에서 약 3.21% 수준의 팽창이 확인되었다. 반면, CNT 도포량이 많은 조건(8 mg)에서는 전압 상승에도 불구하고 변형률 증가가 상대적으로 둔화되었으며, 특히 50% 인장률 조건에서는 응답 민감도가 현저히 낮게 나타났다. 이러한 결과는 앞서 관찰된 문턱 전압 특성과 일관되며, DEA의 최대 구동 성능은 전극의 기계적 순응성과 유전층의 초기 장력 사이의 균형에 의해 결정됨을 보여준다. 특히, 사전 인장률이 높을수록 유전층의 두께가 감소하고 전기장 효율이 향상되며, CNT 전극이 얇을수록 DEA가 정전기력에 더 잘 순응하여 면적 팽창이 극대화되는 경향을 보였다. 이는 정전기력의 식에서도 확인되듯, 동일 전압에서 유전층이 얇고 순응성이 높은 구조일수록 더 큰 기계적 응답을 유도할 수 있음을 시사한다.
또한 전압–변형률 곡선은 전반적으로 인가 전압의 증가에 따라 면적 변형률이 점진적으로 증가하는 경향을 보였으나, 모든 조건에서 완전한 선형성을 나타내지는 않았다. 특히 CNT 도포량이 많은 조건(8 mg)에서는 고전압 영역에서 변형률 증가폭이 둔화되는 현상이 일부 관찰되었으며, 이는 전극의 강성이 DEA의 기계적 변형 한계를 제한함을 시사한다. 반면, 4 mg CNT 조건에서는 상대적으로 꾸준한 응답이 유지되어, 구동 특성의 안정성과 반복 제어 가능성 측면에서 유리한 특성을 보였다. 이러한 결과는 DEA 설계 시 구동 범위에 따른 응답 특성을 고려하여 전극 두께 및 유전층 인장률을 조절할 필요가 있음을 의미한다.
3.3 설계적 시사점
본 연구에서 실험적으로 분석된 사전 인장률과 CNT 전극 도포량은 DEA의 구동 특성에 중첩된 영향을 미치는 주요 설계 변수로 확인되었다. 개별 변수의 효과뿐만 아니라, 두 인자 간의 상호작용이 문턱 전압과 변형률에 동시에 영향을 주는 양상이 관찰되었으며, 이는 단일 변수 최적화만으로는 DEA 성능을 효과적으로 제어하기 어렵다는 점을 시사한다.
먼저 사전 인장률은 DEA의 구동 성능 전반에 걸쳐 일관된 영향을 미쳤다. 인장률이 증가함에 따라 유전층의 두께가 감소하고, 이에 따라 정전기력이 증대되면서 문턱 전압이 낮아지고, 더 큰 면적 변형률이 유도되었다. 이러한 효과는 네 가지 조건 모두에서 일관되게 나타났으며, 인장률은 DEA 설계에 있어 가장 강력한 제어 인자 중 하나임을 보여준다.
한편, CNT 도포량은 DEA 전극의 기계적 순응성에 직접적으로 영향을 주며, 구동 특성에 복합적인 영향을 미쳤다. 도포량이 증가할수록 전극의 두께와 표면 조도가 동시에 증가하였고, 이는 DEA의 변형을 기계적으로 제한하여 문턱 전압 상승과 최대 변위 감소로 이어졌다. 이러한 영향은 인장률 조건에 따라 다르게 나타났으며, 특히 고인장률(125%) 조건에서는 CNT 전극층이 전체 구조에서 차지하는 비중이 커지므로, 전극의 기계적 강성이 DEA 구동을 더욱 강하게 제한하는 경향이 관찰되었다. 그 결과, CNT 도포량 증가에 따른 문턱 전압 상승폭이 저인장률 조건보다 더 크게 나타났다.
정리하면, 문턱 전압을 낮추고 큰 구동 변형을 확보하기 위해서는 전극의 기계적 순응성을 유지하면서도 유전층의 전기적 응답을 극대화할 수 있는 구조 설계가 필요하다. 본 실험에서 가장 우수한 성능은 125% 인장률과 4mg CNT 조건에서 확인되었으며, 이는 높은 전기장 효율과 낮은 전극 강성이 동시에 확보된 결과로 해석된다. 이러한 결과는 DEA의 응용 목적(예: 저전력 구동, 고변위 응답 등)에 따라 사전 인장률과 전극 도포량을 조합하여 설계를 최적화할 필요가 있음을 시사한다. 본 연구에서 제시한 설계 인자 분석 및 평가 방법은 VHB 4905 뿐 아니라 다양한 유전체 재료에도 적용 가능하며, 유전율 및 탄성 계수 등 재료 특성에 따라 설계 인자의 영향도와 최적 조건이 달라질 수 있다. 향후에는 재료 다양성에 따른 다변수 설계 전략 확립을 통해 DEA 기반 소프트 구동 시스템의 성능 향상과 응용 확대가 기대된다.
4. 결론
본 연구에서는 DEA의 구동 특성에 영향을 미치는 두 가지 주요 설계 변수인 사전 인장률과 탄소 나노튜브 전극 도포량에 대한 정량적 분석을 수행하였다. 각각 50% 및 125%의 사전 인장률과 4 및 8mg의 CNT 도포량 조합으로 총 4종의 DEA 시편을 제작하였으며, 전극의 두께 및 표면 조도를 레이저 공초점 현미경을 통해 분석하고, 구동 시 시각적 변형, 문턱 전압, 면적 변형률 등의 구동 성능을 정성 및 정량적으로 평가하였다. 실험 결과, 사전 인장률은 DEA의 유전층 두께를 제어함으로써 구동 성능 전반에 걸쳐 결정적인 영향을 미치는 것으로 나타났다. 높은 인장률은 문턱 전압을 낮추고, 전기장 효율을 향상시켜 더 큰 면적 변형을 유도하였다. 반면 CNT 전극의 도포량은 전극의 기계적 강성을 증가시켜 DEA의 변형을 억제하는 경향을 보였으며, 특히 8mg 도포 조건에서는 문턱 전압이 상승하고 구동 변위가 감소하는 부정적인 영향이 확인되었다. 두 설계 인자는 독립적으로 작용하기보다는 상호작용의 형태로 DEA 성능에 영향을 미쳤다. 이를 통해 DEA의 성능 최적화를 위해서는 단일 인자가 아닌 복합적인 설계 변수 조합을 고려해야 함이 확인되었다. 본 연구는 다양한 DEA 설계 변수의 물리적 역할과 상호작용을 실험적으로 규명함으로써, 향후 저전력·고변위 기반의 유연 구동 시스템 구현을 위한 실용적인 설계 지침을 제공한다. 특히 본 연구에서 실험된 조건 중 125% 사전 인장률과 4mg CNT 도포량 조합은 상대적으로 낮은 문턱 전압과 큰 면적 변형률을 동시에 달성하였으며, DEA의 구동 특성을 개선하는 데 효과적인 설계 방향 중 하나로 확인되었다. 다만 본 연구는 제한된 인장률 및 도포량 범위 내에서 수행되었기 때문에, 향후에는 보다 많은 파라미터 기반 실험 및 해석을 통해 다양한 설계 변수 간의 정량적 상관관계를 도출하고, 최적화 알고리즘이나 시뮬레이션 기반 모델과 연계한 체계적인 설계 전략 수립이 필요할 것으로 판단된다. 이러한 연구는 DEA 기반 시스템의 고성능화는 물론, 햅틱 인터페이스, 착용형 구동기, 소프트 로봇 등과 같은 차세대 유연 전자기기 응용에도 직접적인 기술적 기여를 할 수 있을 것으로 기대된다.
ACKNOWLEDGMENTS
이 연구는 서울과학기술대학교 교내 일반과제 연구비 지원으로 수행되었습니다.
REFERENCES
- 1.
Huang, Y., Yao, K., Li, J., Li, D., Jia, H., Liu, Y., Yiu, C. K., Park, W., Yu, X., (2022), Recent advances in multi-mode haptic feedback technologies towards wearable interfaces, Materials Today Physics, 22, 100602.
10.1016/j.mtphys.2021.100602
- 2.
Pyo, S., Lee, J., Bae, K., Sim, S., Kim, J., (2021), Recent progress in flexible tactile sensors for human-interactive systems: From sensors to advanced applications, Advanced Materials, 33(47), 2005902.
10.1002/adma.202005902
- 3.
Jeong, J., Kang, M., Song, Y., Pyo, S., (2025), Interactive haptic system with multimodal tactile sensing and hydraulic feedback for realistic human-machine interaction, Advanced Intelligent Systems, 7(5), 2400578.
10.1002/aisy.202400578
- 4.
Kang, M., Gang, C.-G., Ryu, S.-K., Kim, H.-J., Jeon, D.-Y., Pyo, S., (2024), Haptic interface with multimodal tactile sensing and feedback for human-robot interaction, Micro and Nano Systems Letters, 12(1), 9.
10.1186/s40486-024-00199-w
- 5.
Yang, T.-H., Kim, J. R., Jin, H., Gil, H., Koo, J.-H., Kim, H. J., (2021), Recent advances and opportunities of active materials for haptic technologies in virtual and augmented reality, Advanced Functional Materials, 31(39), 2008831.
10.1002/adfm.202008831
- 6.
Ankit, Ho, T. Y. K., Nirmal, A., Kulkarni, M. R., Accoto, D., Mathews, N., (2022), Soft actuator materials for electrically driven haptic interfaces, Advanced Intelligent Systems, 4(2), 2100061.
10.1002/aisy.202100061
- 7.
Guo, Y., Liu, L., Liu, Y., Leng, J., (2021), Review of dielectric elastomer actuators and their applications in soft robots, Advanced Intelligent Systems, 3(10), 2000282.
10.1002/aisy.202000282
- 8.
Tang, C., Du, B., Jiang, S., Wang, Z., Liu, X., Zhao, H., (2024), A review on high-frequency dielectric elastomer actuators: Materials, dynamics, and applications, Advanced Intelligent Systems, 6(2), 2300047.
10.1002/aisy.202300047
- 9.
Wang, Y., Ma, X., Jiang, Y., Zang, W., Cao, P., Tian, M., Ning, N., Zhang, L., (2022), Dielectric elastomer actuators for artificial muscles: A comprehensive review of soft robot explorations, Resources Chemicals and Materials, 1(3), 308-324.
10.1016/j.recm.2022.09.001
- 10.
Xi, S., Yang, S., Xiang, C., Chen, Y., Niu, Y., Yang, J., He, X., (2024), Advancements and challenges in dielectric elastomer actuator-based biomimetic mobile robots, Sensors and Actuators: A. Physical, 380, 116024.
10.1016/j.sna.2024.116024
- 11.
Yang, L., Hao, M., Yang, K., Lan, D., Zhang, X., Tian, X., Wang, Z., (2025), A review of methods and applications for improving electric driving performance of dielectric elastomer, IEEE Transactions on Dielectrics and Electrical Insulation, 32(1), 117-126.
10.1109/TDEI.2024.3486271
- 12.
Matsuhisa, N., Chen, X., Bao, Z., Someya, T., (2019), Materials and structural designs of stretchable conductors, Chemical Society Reviews, 48, 2946-2966.
10.1039/C8CS00814K
- 13.
Bae, K., Kim, M., Kang, Y., Sim, S., Kim, W., Pyo, S., Kim, J., (2022), Dual-scale porous composite for tactile sensor with high sensitivity over an ultrawide sensing range, Small, 18(39), 2203193.
10.1002/smll.202203193
- 14.
Maheswaran, R., Shanmugavel, B. P., (2022), A critical review of the role of carbon nanotubes in the progress of next-generation electronic applications, Journal of Electronic Materials, 51(6), 2786-2800.
10.1007/s11664-022-09516-8
- 15.
Kang, M., Choi, H.-G., Park, K., Pyo, S., (2025), Additively manufactured 3D auxetic metamaterials for structurally guided capacitive and resistive tactile sensing, Advanced Functional Materials, e09704.
10.1002/adfm.202509704
- 16.
Kim, J., Lee, T., Han, J.-H., Kim, J. H., (2024), Possibility of large-area carbon nanotube films formation through spray coating, Micro and Nano Systems Letters, 12(1), 6.
10.1186/s40486-023-00193-8
Biography
- Mingyu Kang
M.S. candidate in the Department of Mechanical Design and Robot Engineering, Seoul National University of Science and Technology. His research interests are haptic interfaces and micro/nano sensors.
- Joong-Hyun Park
B.S. candidate in the Department of Mechanical System Design Engineering, Seoul National University of Science and Technology. His research interests are micro sensors.
- Jong-An Choi
Received the M.S. degree in the Department of Mechanical Design and Robot Engineering, Seoul National University of Science and Technology. His research interests are energy harvesters and micro sensors.
- Jingu Jeong
Received the M.S. degree in the Department of Mechanical Design and Robot Engineering, Seoul National University of Science and Technology. His research interests are haptic interfaces and energy harvesters.
- Soonjae Pyo
Associate professor in the Department of Mechanical System Design Engineering, Seoul National University of Science and Technology. His research interests are modeling, design, and fabrication of micro/nano-systems.