ABSTRACT
This study introduces a wire-spring based planar gravity compensation mechanism and evaluates its performance through both analysis and experiments. The mechanism features three pulleys, one spring, and one wire, all arranged in a planar configuration for compact installation within a robotic arm. A linear approximation of the target gravitational torque was derived using the least-squares method, allowing for the determination of spring stiffness and initial tension. Experimental results indicated that the proposed mechanism reduced the maximum torque by approximately 63%. However, the measured slope was gentler than the theoretical model due to friction losses. Additional tests that varied spring stiffness (k) and initial wire tension (A) confirmed that k primarily influences the slope of the compensation torque, while A affects its intercept. This finding suggests that compensation performance can be tailored to specific requirements by adjusting these parameters. The study successfully demonstrates a compact and lightweight mechanism and experimentally validates its tunability through design adjustments. Future research will focus on reducing friction, extending the mechanism to multi-degree-of-freedom systems, and validating performance under dynamic conditions for applications in collaborative and medical robots.
-
KEYWORDS: Gravity compensation, Wire-spring mechanism, Least squares optimization, Lightweight design, Collaborative robot
-
KEYWORDS: 중력 보상, 와이어–스프링 메커니즘, 최소제곱 최적화, 경량 설계, 협동 로봇
1. 서론
최근 협동로봇은 제조, 물류, 의료 등 다양한 분야에서 널리 활용되고 있으며, 이에 따라 로봇의 작업 효율성과 안전성 확보는 중요한 연구 과제로 떠오르고 있다. 특히 직렬 구조를 기반으로 하는 로봇 암은 자중과 가반하중에 의해 각 관절에 큰 중력 토크가 발생한다[
1]. 이러한 중력 토크는 로봇의 자세 제어 안정성을 저하시킬 뿐만 아니라, 고사양의 구동 모터를 사용하도록 만들어 시스템 전체의 비용과 에너지 소모를 증가시킬 우려가 있다. 고사양 모터를 통한 해결은 단기적으로는 로봇의 동작을 보장하지만, 결과적으로 로봇의 중량과 소비 전력을 높여 생산 단가를 상승시킨다. 더불어 협동로봇처럼 사용자가 로봇 근처에서 작업하는 환경에서는 불필요한 관성의 증가가 작업자의 안전성에도 부정적인 영향을 미친다.
따라서 중력에 의하여 발생하는 로봇 암의 조인트 토크를 효과적으로 보상하여 부하를 줄이고, 경량화와 소비전력 감소를 달성하는 중력보상장치의 존재는 필수적이다.
다양한 메커니즘을 활용한 중력보상장치가 다수 제안되고, 그 성능을 평가하는 연구가 진행되어 왔다. 고전적인 방식으로는 Counter-mass를 이용한 방법이 있으며, 이는 로봇 팔의 자중을 반대편 무게로 상쇄하는 단순한 원리에 기반한다[
2,
3]. 또한 로봇 링크의 질량 중심을 변화시켜 무게 중심의 위치를 조절하는 방법도 있다[
4,
5].
그러나 이러한 방식은 구조적으로 로봇의 부피를 키우고 자중을 무겁게 하여 로봇 전체의 관성을 증가시키는 한계가 있다.
또 다른 방법으로는 기어 유닛과 스프링, 롤러 등을 결합한 방식이 제안되었는데, 기어비를 통해 각도에 따른 스프링 변형을 조절하여 보상을 수행한다[
6]. 베벨 기어와 스프링을 결합한 방식도 제안되었다[
7]. 이러한 기어 방식은 내구성 측면에서는 유리하지만, 기어 장치로 인해 발생하는 무게 및 부피 증가와 구조적인 복잡성을 피하기 어렵다.
한편, 슬라이더-크랭크 메커니즘에 평행사변형 링크를 적용한 방식도 제안되었다[
8]. 이 방식은 내구성이 높으며 다자유도 중력보상 수행이 가능하다는 장점이 있다. 그러나 슬라이더-크랭크와 평행사변형 링크 결합 구조에 의해 기구적 복잡성이 증가하고, 구조가 커져 설치 공간 등의 제약이 발생할 수 있다. 또한 여러 개의 피치 관절로 이루어진 직렬로봇에 링크를 병렬 배치함으로써 다자유도 중력보상을 적용하기 위한 연구도 존재하나[
9,
10], 복잡한 링크 구조로 실제 로봇에 적용하기에는 문제가 있을 수 있다.
이러한 중력보상장치들은 중력 토크를 효과적으로 상쇄할 수 있다는 장점에도 불구하고, 대부분 그 자체의 구조가 무겁고 복잡하며 부피가 크다는 한계를 지닌다. 이는 결과적으로 로봇의 전체 중량과 부피를 증가시켜, 동작 시 불필요한 동적 토크를 유발하고, 설계 시 공간적 부담이 커질 수 있다. 이러한 특성은 특히 협동로봇처럼 한정된 공간에서 인간과 밀접하게 협업해야 하는 환경에서는 적합하지 않다. 그에 따라 경량화에 초점을 맞춘 와이어 기반 중력보상장치도 연구되고 있다[
11].
따라서 본 연구에서는 기존의 복잡하고 부피가 큰 메커니즘과는 달리, 와이어–스프링–풀리를 평면 구조로 배치하여 부피를 줄이고, 전체 시스템을 매우 컴팩트하게 구성할 수 있는 새로운 중력보상 메커니즘을 제안한다. 본 연구에서 제안된 장치는 공간 제약이 큰 환경에서도 설치가 가능하며, 소수의 핵심 부품(와이어, 3개의 풀리, 1개의 스프링)만으로 구성되어 구조적 단순성과 경량화를 동시에 확보하였다.
특히 제안된 메커니즘은 로봇 링크 내부에 모듈 형태로 적용 가능하도록 설계되어, 기존 로봇의 구조를 크게 변경하지 않고도 중력보상 기능을 추가할 수 있다는 장점을 가진다.
본 연구의 중력보상 장치는 요약하면, 소형·경량 구조로 협소한 공간에 설치 가능하고, 메커니즘의 구성 요소 최소화를 통해 제작 및 조립이 단순하며, 모듈형 설계를 통해 기존 로봇 시스템에도 적용 가능하다는 점에서, 보상 성능을 유지하면서도 불필요한 에너지·관성 증가를 억제할 수 있는 기존 연구들과 차별화된 특징을 가진다.
본 논문의 구성은 다음과 같다. 제2장에서는 제안한 중력보상장치의 메커니즘과 발생 토크 수식을 유도한다. 제3장에서는 설계 변수 최적화 및 성능 분석 시뮬레이션 결과를 제시한다. 제4장에서는 실험 결과를 정리 및 분석하고, 마지막으로 제5장에서는 연구의 결론과 향후 연구 방향을 제시하였다.
2. 중력 보상 메커니즘
2.1 메커니즘 구성 및 동작 원리
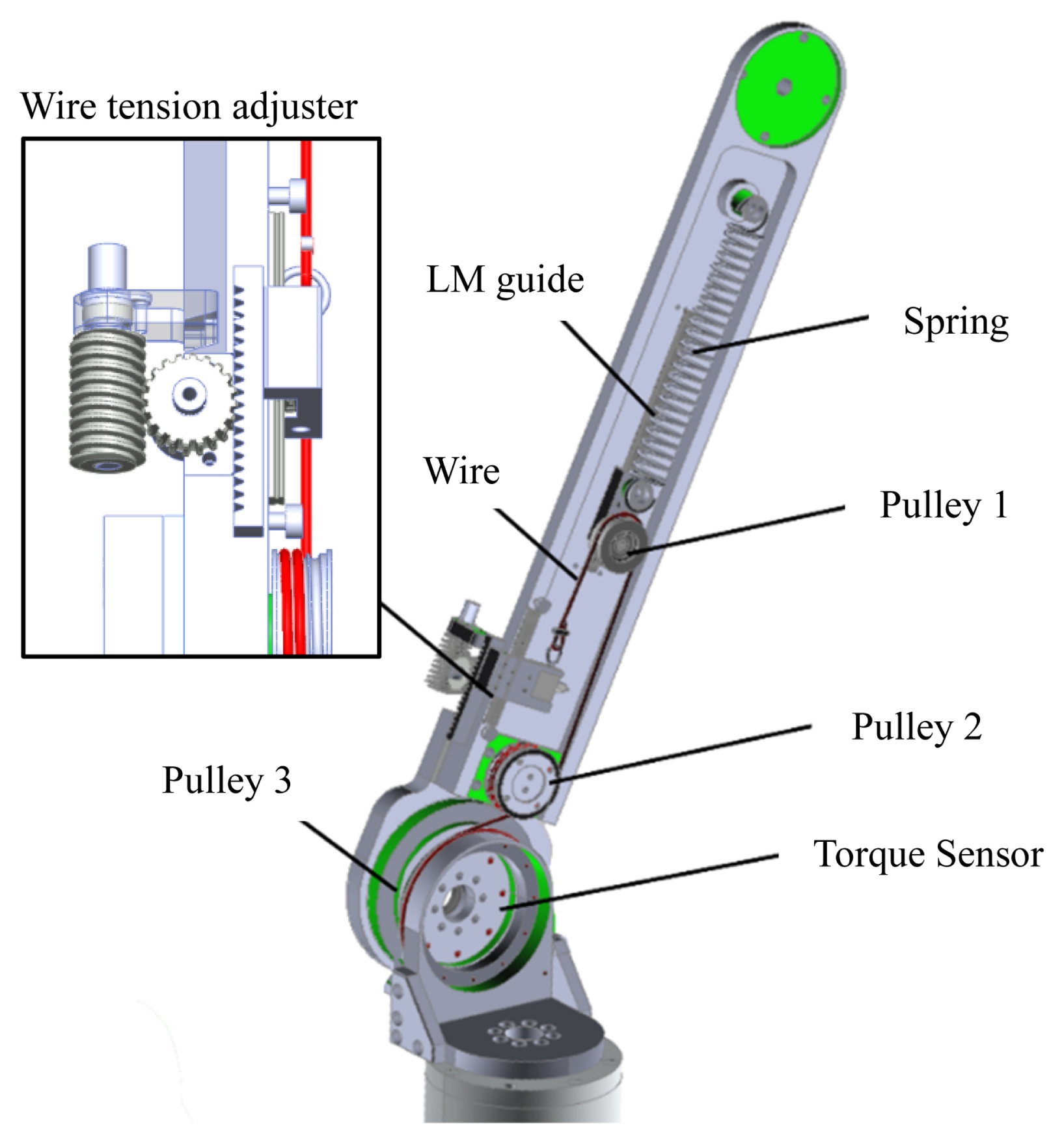
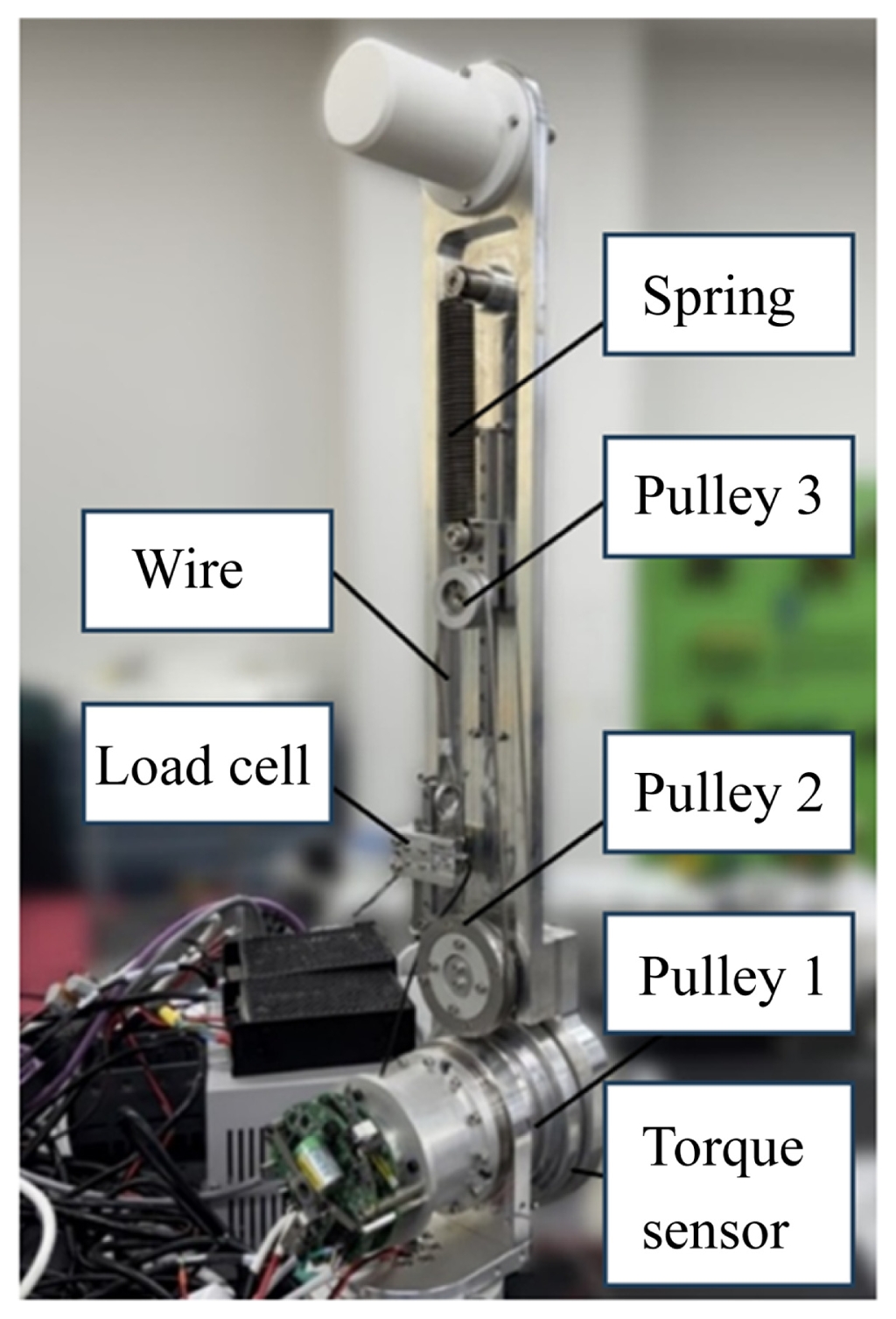
Fig. 1은 본 연구에서 제안하는 중력보상 메커니즘의 구조이다. 본 메커니즘은 피치 방향으로 회전하는 링크의 내부 공간에 평면 구조로 배치되어, 로봇 암의 외형을 크게 변경하지 않으면서도 중력 보상 기능을 내장할 수 있도록 설계되었다. 제1부터 3까지의 풀리를 하나의 와이어가 감고 있다. 와이어의 한 쪽 끝은 제1 풀리 우측 하단의 스프링 고정부에 연결되어 있다. 이 와이어는 제1 풀리를 따라 감긴 뒤 제1 풀리와 제2 풀리의 접선을 따라 제1 풀리에 도달한다. 제2 풀리의 원주를 따라 한 바퀴 감긴 와이어는 상단의 제3 풀리로 이어지고, 마지막으로 상단 와이어 고정부에 연결된다. 제3 풀리는 스프링과 연결되어 있으며, 와이어의 인장에 따라 LM 가이드 위에서 병진 운동하게 된다. 이 스프링이 당겨지는 정도는 링크의 자세에 따라 달라진다. 해당 메커니즘에 기반하여 로봇 암은 링크 각도에 따라 중력보상 토크를 생성한다.
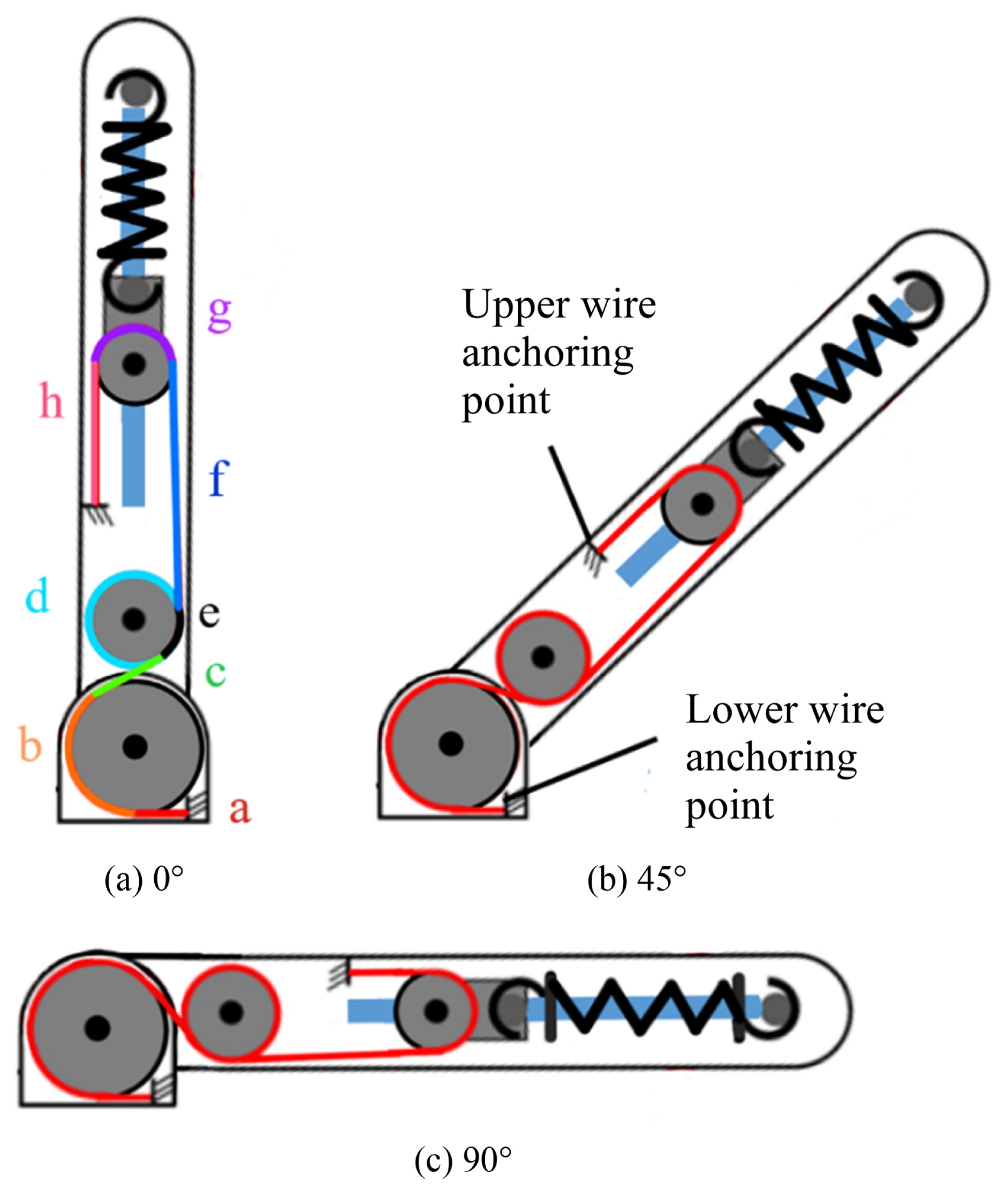
Fig. 2는 링크의 피치 회전 각도에 따른 내부 중력보상 장치의 변화를 나타낸다. (a) 로봇의 자세가 0o일 때는 보상해야 할 중력 토크가 존재하지 않으며, 스프링도 당겨지지 않은 상태이다. 다만, 스프링의 초기 장력으로 인해 보상 토크가 완전히 0이 되지는 않는다. (b) 로봇의 자세가 45o일때는 링크 회전에 따라 제1풀리에 와이어가 감긴다. 전체 와이어 길이는 일정하므로, 감긴 와이어의 길이는 나머지 와이어 길이를 감소시켜 스프링을 당긴다. (c) 로봇의 자세가 90o 일 때는 로봇의 중력 토크가 가장 크게 발생하며, 스프링 변위도 가장 크기 때문에 가장 큰 보상 토크가 발생한다. 이와 같이 해당 메커니즘을 통해 로봇의 자세에 따라 다르게 발생 하는 중력 토크를 보상할 수 있다.
또한 본 메커니즘에는 와이어의 초기 장력을 정밀하게 조절할 수 있는 장치를 포함하였다.
Fig. 1에 나타낸 바와 같이, 웜(Worm)과 웜휠(Worm Wheel), 그리고 랙(Rack)으로 구성된 조절부를 통해 회전 운동을 직선 운동으로 변환할 수 있다. 와이어 초기 장력 조절부의 웜이 회전하면 웜휠을 구동시키고, 웜휠은 피니언과 같은 역할을 수행하여 랙과 맞물려 직선 운동을 발생시킨다. 이 메커니즘을 통해 와이어 고정부의 수직 위치를 미세하게 조정할 수 있다. 또한 웜 기어는 높은 감속비와 Selflocking 특성을 지니므로, 작은 입력 토크로도 와이어의 초기 장력을 정밀하게 제어할 수 있다. 특히 웜휠이 웜을 역으로 구동시키는 것은 불가능하기 때문에, 외력에 의한 역구동 현상이 방지되어 안정적인 와이어 초기 장력값 유지가 가능하다.
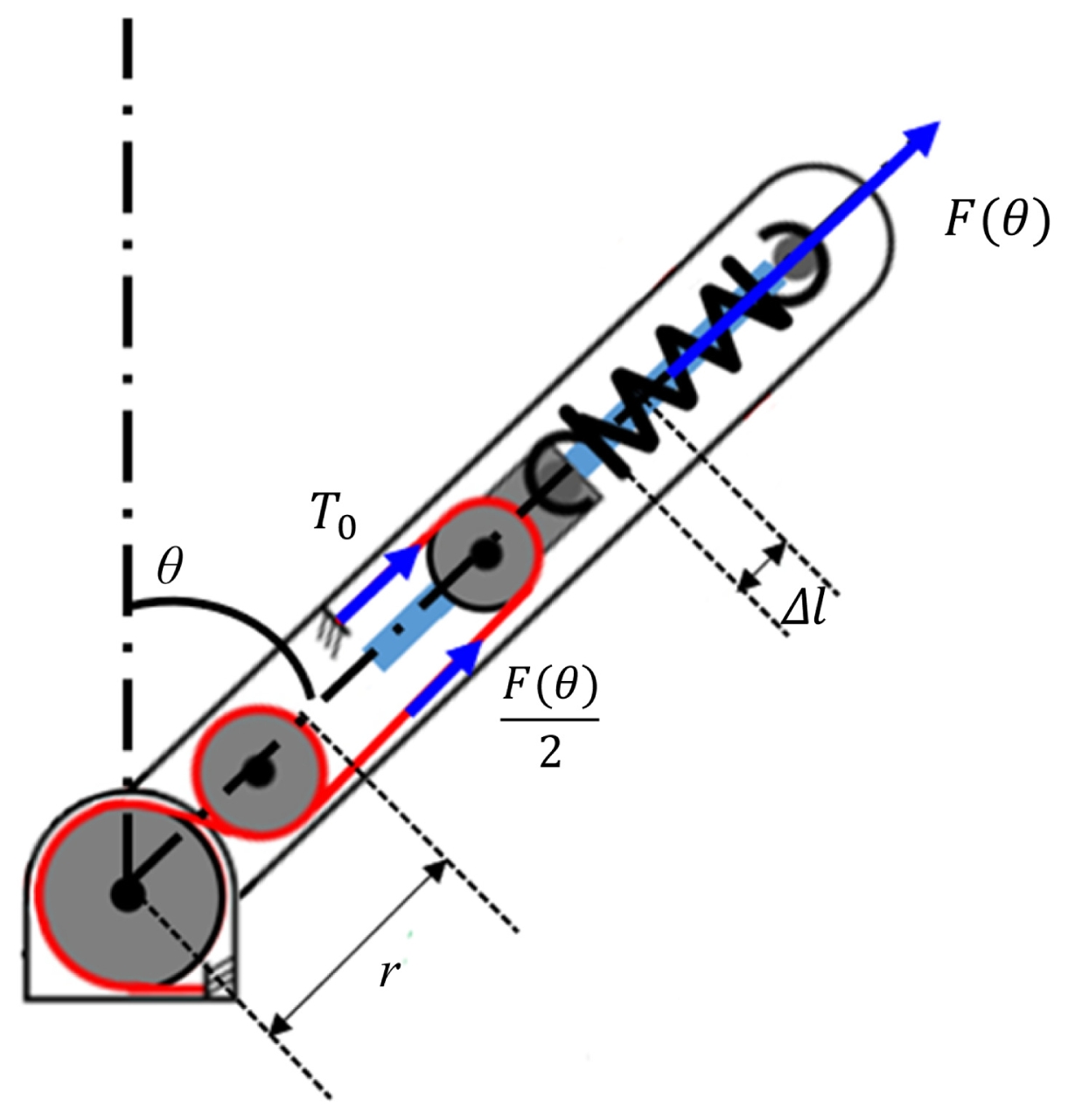
본 절에서는 회전 각도에 따른 토크를 확인하기 위해 정적 해석을 수행하여 보상 토크 수식을 유도하였다. 자유물체도는
Fig. 3에 나타내었다.
먼저 스프링 인장 상태에 따른 복원력은 식(1)과 같이 표현된다.
여기서 k는 스프링 상수, Δl은 스프링 인장 길이, P는 스프링 초기 장력이다.
스프링 복원력에 의한 와이어 전체 장력은 식(2)와 같이 나타낼 수 있다.
여기서 T
0는 와이어 장력 조절부를 통해 조절할 수 있는 와이어 초기 장력이다. 또한 와이어를 따라 제3 풀리의 양쪽으로 스프링 복원력이 50%씩 작용하므로, 와이어 전체 장력은
Fig. 3에 나타난 것과 같이 와이어 초기 장력 + 스프링 복원력/2의 형태로 생성된다. 이 와이어 전체 장력이 식(3)의 중력보상 토크를 발생시킨다.
여기서 r은 보상 토크를 발생시키는 유효 반경이다. 제1 풀리의 중심에서 제2 풀리의 가장자리 까지가 이에 해당하며, 이를
Fig. 3에 표시하였다. 식(4)로 정리된 중력보상 토크 수식을 살펴보면 여기서 조정 가능한 변수는 스프링 상수 k와 스프링 초기 장력 P, 그리고 와이어 초기 장력 T
0 임을 알 수 있다. 식(4)의 우변을 θ를 이용하여 표현하기 위해서는 Δl을 θ의 함수로 나타낼 필요가 있다.
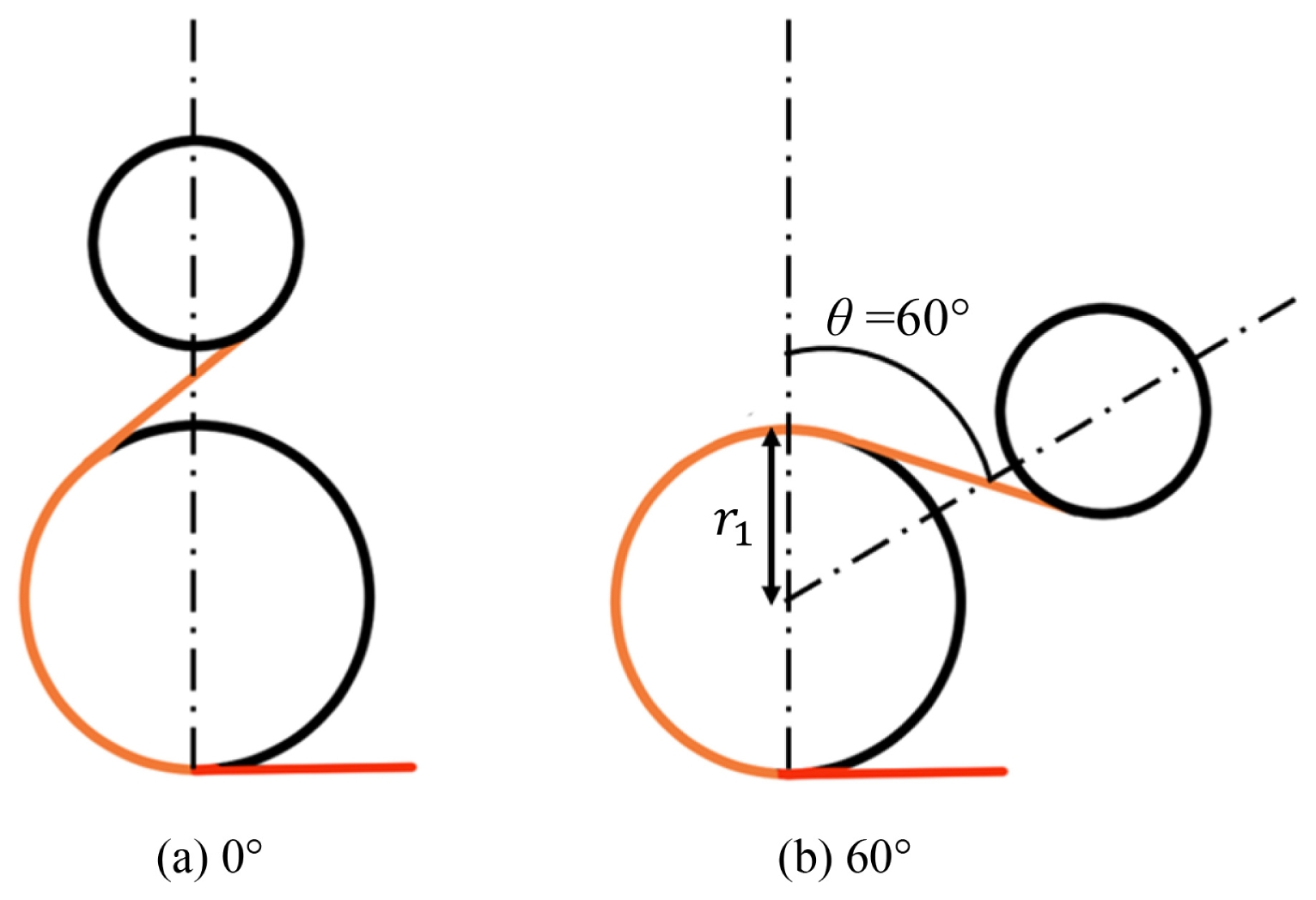
링크가 시계 방향으로 θ만큼 회전함에 따라 제1 풀리에 감긴 와이어는
Fig. 4와 같이 끝점이 동일 각도 θ만큼 이동한다. 이를 수식으로 나타내면 식(5)와 같다.
즉 식(5)는 중심각 θ를 가지는 부채꼴 호의 길이와 같다. 와이어의 전체 길이는 항상 일정하고 각도에 따라 변하지 않으므로, 결과적으로 추가로 감긴 Δb만큼 와이어의 나머지 부분은 짧아진다.
이를 직관적으로 이해하고 분석하기 위해
Fig. 2(a)에 와이어를 구역별로 a부터 h까지 나누어 나타내었다. a는 하단 와이어 고정부에서 제1 풀리까지의 최소 거리이므로 모든 θ에서 불변한다. 또한 c는 제1 풀리와 제 2풀리의 접선의 길이와 같은데, 두 풀리의 반경과 중심 사이의 거리는 변하지 않으므로 모든 θ에서 불변하는 값이다. d는 풀리 2의 원주 길이와 같으므로 마찬가지로 모든 θ에서 불변한다. a부터 h까지의 와이어 길이 총 합은 항상 일정하므로, 결론적으로 구역별 와이어 길이는 식(6)에 따라 변화한다.
다음은 스프링 변위 Δl 0.005 m당 Δ(e+f+g+h)는 0.01 m씩 감소함을 이용하여 Δl을 θ의 함수로 나타내는 과정이다. 식(6)에 나타난 관계식과 같이, 이 감소량이 Δb임을 고려하면 관계식을 식(7)과 같이 나타낼 수 있다.
제1 풀리의 반경(0.0425 m)을 대입해 식(7)의 θ를 계산하면 θ = 13.5o이다. 해당 결과와 스프링 변위 Δl = 0.005 m를 대입해 Δl과 θ 사이의 관계식을 정의하면 식 (8)과 같다. 식(8)을 식(4)에 대입하면 식(4)의 우변을 θ의 함수로 표현할 수 있으며, 이를 식(9)로 나타내었다.
스프링 상수 k가 결정되면 스프링 초기장력 P는 제조사 카탈로그에서 제시되는 선택지 중 하나를 선택해야 하므로, P는 독립적, 연속적으로 조정하기 어려운 변수이다. T
0는 와이어 초기 장력이며,
Fig. 3의 와이어 초기 장력 조절부에 의해 독립적, 연속적으로 조절 가능한 변수이다. 식(9)를 정리하면 식(10)과 같다.
위에서 서술한 바와 같이, 스프링 초기 장력 P는 독립적, 연속적으로 조정하기 어려운 변수이다. 따라서 식(10)의 절편을 다음과 같이 치환하여 정리할 수 있다.
식(11)과 같이 P/2+T0를 A로 치환하여 나타내면, T0의 적절한 조절을 통해 A를 연속적으로 조절할 수 있다. P가 연속적 조절이 불가능한 변수임에도 불구하고, 와이어 초기 장력 조절을 통해 초기 장력들의 조합인 절편(rA)을 원하는 값으로 지정하고 보상 토크식에서의 영향을 직관적으로 분석할 수 있다.
2.3 설계 변수 정의 및 조건 설정
본 절에서는 보상 토크 수식의 설계 변수와 조건을 정의하고, 최적화를 위한 준비를 수행한다. 식(9)에서 r은 유효 반경(실험 장치 조건인 0.11 m로 고정), k는 스프링 상수이다. θ는
Fig. 4에 나타난 것과 같이 링크의 Pitch 각도이며, 로봇의 구조상 0o에서 80o까지를 구동 범위로 정의한다. 해당 메커니즘으로 생성되는 보상 토크 τ
c는 각도 θ에 대한 1차 함수의 형태를 띠며, 식(11)로 나타난다.
이때 보상해야 할 목표 중력 토크는 링크 및 하중 조건에 따라 다음 이론식으로 표현할 수 있다.
여기서 m은 질량, g는 중력가속도, l은 회전 중심으로부터 무게중심까지의 거리이다. 실험적으로 실제 계수를 얻기 위해 링크 각도를 0o에서 80o까지 10o 간격으로 변화시키며 토크 센서를 이용해 각도별 중력 토크를 측정하였다. 측정된 결과는 이론식과 동일하게 사인 함수 형태와 부합하였으며, 최소제곱법 피팅을 통해 계수 q = 6.21로 도출하였다. 따라서 본 연구에서는 중력보상 미적용 상태의 목표 조인트 토크를 식(13)과 같이 정리하였다.
본 연구에서는 목표 중력 토크인 식(13)을 직선으로 근사하여 최적 보상 토크 수식을 정의하고, 해당 수식의 기울기와 절편을 기준으로 식(11)에 근거한 설계변수 k와 A를 초기 설정하였다. 이후 실제 실험 단계에서 설계변수 조합을 체계적으로 선택하기 위해, 각 설계변수가 보상 토크 직선의 특성에 미치는 물리적 역할을 명확히 구분할 필요가 있다.
이를 위해 본 연구에서는 k와 A를 독립적으로 변화시키며 토크를 측정하는 실험을 수행하였다. 그 결과, 식(11)에서 예측 가능한 바와 같이 k는 보상 토크 직선의 기울기를, A는 절편을 결정한다는 점을 실험적으로 확인하였다. 이러한 변수–특성 간의 관계 규명은 설계변수의 조합을 통해 요구되는 보상 성능을 의도적으로 조정할 수 있음을 보이기 위한 것이다. 따라서 본 절에서 설계 변수를 정의한 목적은 보상 토크의 기울기와 절편을 독립적으로 조율하기 위한 설계 전략 정립에 있다.
3. 성능 최적화 및 분석
3.1 설계변수 최적화
본 절에서는 식(13)으로 나타난 목표 중력 토크와 식(11)로 표현된 보상 토크 식을 바탕으로 설계 변수를 최적화하였다. 보상 토크 식 설계 변수 최적화는 작동 구간인 θ ∈ {0o,10o,…,80o}에서 최소제곱법을 사용한다.
즉 해당 각도 구간에서 목표 토크와 보상 토크의 차이를 최소화하는 직선 근사식을 구하고, 이를 다시 변수 (k, A)로 환산한다. 식(15)는 최소제곱법을 통해 도출된 최적 직선 근사식이다.
이를 식(11)에 대입해 설계 변수로 환산하면 최적 스프링 상수는 식(16)과 같이 나타나고, 최적A는 식(17)의 형태로 표현된다. 이론상의 최적값은 *로 표현하였다.
3.2 시뮬레이션 성능 분석
본 절에서는 3.1에서 도출된 최적 설계변수 k*, A*를 바탕으로 생성된 보상 토크와 목표 중력 토크의 비교뿐만 아니라, 설계변수 k, A 변화가 보상 토크 특성에 미치는 영향을 추가적으로 분석하였다.
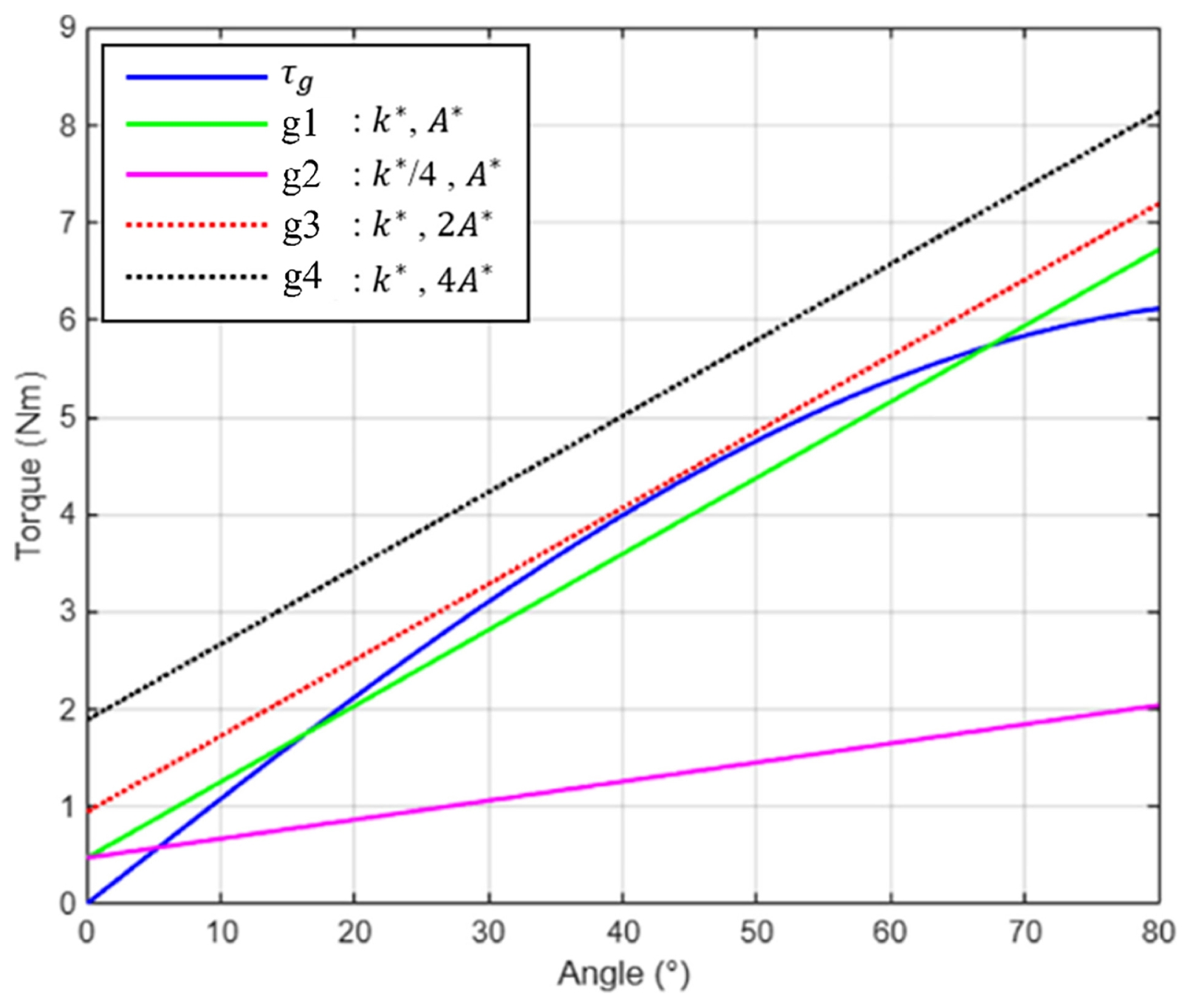
Fig. 5는 작동 구간 θ ∈ [0o,80o] 에서 조인트 토크, 최적 보상 토크, 그리고 k와 A를 변화시킨 경우 측정된 보상 토크 직선들을 동시에 시뮬레이션으로 나타낸 그래프이다. 조인트 토크와 최적 보상 토크 그래프 간의 오차를 RMS로 계산한 결과는 약 0.345 Nm로 나타났고, 이는 최대 목표 토크(6.21 Nm)에 대한 상대 오차로 환산하면 약 5.6%이다. 이는 제안된 장치가 평균적으로 0.35 Nm 이하의 오차로 조인트 토크를 상쇄하는 것이 장치의 최적 성능임을 의미하며, 최대 토크 기준으로는 약 93% 감소임을 알 수 있다. 이를 통해 해당 장치가 직선 근사 기반 보상 메커니즘이지만 양호한 보상 성능을 제공할 수 있음을 확인할 수 있다.
본 연구에서는 최소제곱법을 이용하여 0o에서 80o까지의 전체 작동 구간에서 목표 중력 토크와 보상 토크 간의 평균 오차를 최소화하도록 보상 토크 직선을 도출하였다. 이에 따라 특정 각도 구간에서 국부적인 오차가 발생할 수 있으나, 전체 구간에 대해 균형 잡힌 보상 성능을 확보하는 것을 설계 목표로 하였다.
Fig. 5와 같은 시뮬레이션 결과는 제안한 메커니즘이 조인트 토크를 효과적으로 보상할 수 있음을 수치적으로 입증한다. 다만 시뮬레이션은 이상적인 모델과 상황에 기반한 결과이므로, 실험을 통해 실제 측정값을 얻어 검증할 필요가 있다.
다음으로, 조절 가능한 설계 변수인 스프링 상수와 와이어 초기 장력이 보상 토크 수식에 미치는 영향을 시뮬레이션으로 분석하였다. 먼저 그래프 g1, g2의 비교를 통해 스프링 상수k가 보상 토크 직선식에 미치는 영향을 파악한다. 이 경우 기울기는 정확히 1/4배로 조절되었는데, 이는 스프링 강성 변화가 기울기에 비례적으로 작용한다는 식(11)과 일치하는 결과이다.
설계변수 A가 보상 토크 직선식에 미치는 영향을 그래프 g1, g3, g4의 비교를 통해 파악한다. A값 설정은 2.2에서 서술한 바와 같이 와이어 초기 장력 T0의 조절을 통해 이루어진다. 해당 그래프 3개를 비교하면, 식(11)을 기반으로 계산된 값과 동일하게 절편이 2배 및 4배로 증가함을 확인할 수 있다. 이를 통해 스프링 초기 장력과 와이어 초기 장력의 조합인 A가 보상 토크식의 절편을 결정한다는 수식 분석 결과를 직관적으로 확인할 수 있다.
4. 실험 및 결과
4.1 실험 장치 구성 및 제작 사양
실험을 위해 제안한 중력보상 메커니즘을 실제 로봇 암 내부에
Fig. 6과 같이 구현하였다. 본 로봇은 2자유도로 설계되었으며, 베이스의 요(Yaw) 움직임과 링크의 피치(Pitch) 움직임이 가능하다. 링크와 베이스 구조는 알루미늄 합금(AL6061)을 사용하여 제작하였다.
링크의 길이는 약 570 mm이다. 내부 중력보상 메커니즘은 제안한 와이어–스프링–풀리 구조를 동일하게 적용하였다. 실험에 사용된 스프링 2종은 인장 스프링으로, k는 각각 3800과 980 N/m 이다.
k* 및 k*/4에 가장 가까우며, 자유 길이 및 허용 하중 시 길이가 적절한 상용 제품들로 선정하였다. 편의를 위해 실험에 사용한 스프링 상수를 각각 k1 과k2로 표시한다.
와이어 장력 측정을 위한 로드셀(SBAT-02, CAS Corporation, Korea)은 정격 용량 200 N이며, 스트레인 게이지 방식으로 로봇 링크 내부에 설치가 용이한 소형 구조이다. 와이어는 직경 2.5 mm의 스테인리스(SUS304) 소재를 사용하였으며, 참고 사용 하중은 1569 N으로 설계 범위 내에서 충분한 안전율을 확보하였다.
제1에서 3 풀리는 와이어 재질과 동일한 SUS304 가공품으로 제작하였으며, 링크 내부 평면에 배치하였다. 모터는 링크 축에 장착하였고, 최대 5.2 Nm의 출력 토크를 낼 수 있다. 링크 축 내부에는 토크 센서(ASTB 50, AIDIN ROBOTICS, Korea)를 설치하여 링크의 피치 각도별 발생 토크를 계측하였으며, 센서의 Resolution은 0.01 Nm이다. 토크 센서 신호는 고속 CAN 인터페이스 모듈을 통해 수집되었으며, LabVIEW 기반 계측 프로그램으로 실시간 처리하였다. LabVIEW 프로그램은 모터 제어 기능과 함께 로드셀 및 토크 센서값을 초당 10개씩 계측할 수 있도록 구성하였다.
4.2 실험 결과 분석
4.2.1. 설계변수별 영향 검증
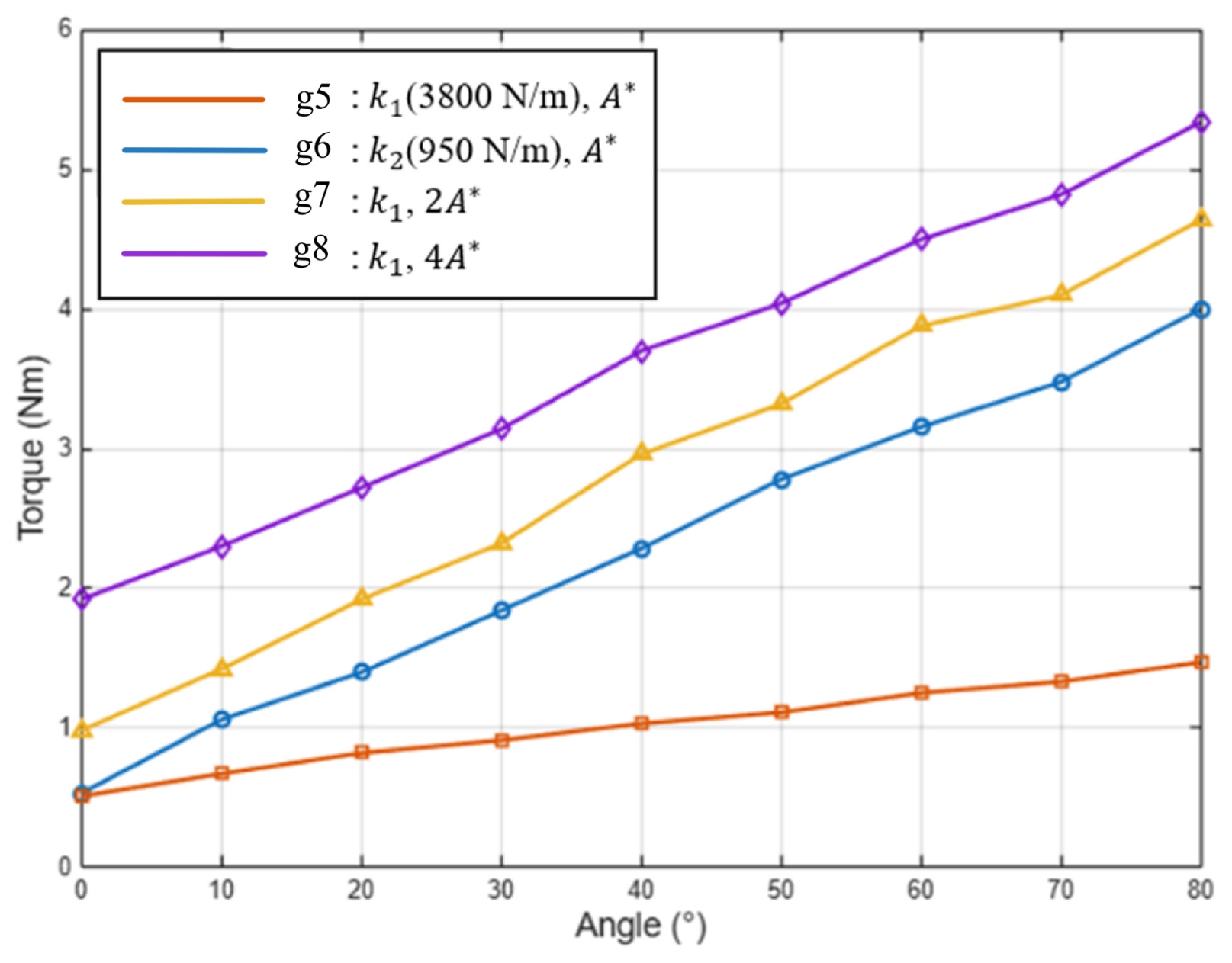
실험을 통해 설계변수 k와 A가 보상 토크 특성에 미치는 영향을
Fig. 7 분석을 통해 검증한다. 데이터는 매번 같은 조건하에, 0o에서 80o까지 10o 단위로 각 자세에서 5회 반복 측정한 총 45개의 값을 사용하였다. 데이터들 간의 표준편차가 0.02 수준으로 매우 작아, 반복 측정 결과의 재현성과 시스템의 안정성이 확보되었음을 확인할 수 있다.
먼저 그래프 g5, g6의 비교를 통해 스프링 상수k가 보상 토크 직선식에 미치는 실제 영향을 파악한다. 그래프 g6의 경우 1차 회귀 모델로 추정된 기울기는 0.012 Nm/deg, 그래프 g5의 경우에는 0.043 Nm/deg이다. 즉, k값을 증가시키면 실제 보상 토크 직선의 기울기도 함께 증가하므로 설계 단계에서 원하는 보상 기울기를 맞추기 위한 주요 조정 수단으로 사용할 수 있음을 확인하였다. 다만 스프링 상수가 커질수록 와이어 장력이 크게 증가하고, 이에 따라 풀리–와이어 접촉부에서의 마찰 손실이 함께 커져 이론 대비 유효 기울기는 그래프 g5, g6가 각각 55%, 67%임을 확인하였다. 즉 마찰 증가로 인한 보상 토크 손실 효과 분석과 수식의 기울기 부분의 보정이 추후 연구에서 필요함을 알 수 있다.
그래프 g5, g7, g8의 비교를 통해 A가 보상 토크 직선식에 미치는 실제 영향을 검증한다. 측정값 기반 1차 회귀를 통해 수식을 추정한 결과, A를 1배, 2배, 4배 증가시킨 각 경우, 보상 토크 직선의 기울기는 각각 0.043, 0.043, 0.044 Nm/deg로 유의미한 변화가 나타나지 않았다. 반면 직선의 절편은 A 값에 비례하여 증가하는 양상이 관찰되었다. 이는 보상 토크 식에서 절편 항이 rA로 표현되므로, A가 커질수록 보상 토크도 그에 맞춰 상승한다는 시뮬레이션 결과와 일치한다.
따라서 A는 보상 직선의 절편을 조정할 수 있는 주요 설계 변수로, 목표 토크와의 오차를 특정 구간에서 최소화하기 위해 유용하게 활용될 수 있다.
이와 같은 결과는 보상 토크 직선의 기울기와 절편을 각각 독립적으로 조절할 수 있음을 실험적으로 확인한 것과 같다. 즉, 스프링 강성과 와이어 초기장력을 조합함으로써 원하는 보상 특성을 구현할 수 있으며, 실제 설계 시 요구되는 작업 범위와 성능 기준에 맞추어 변수 선택을 최적화할 수 있음을 시사한다.
4.2.2. 보상 성능 분석
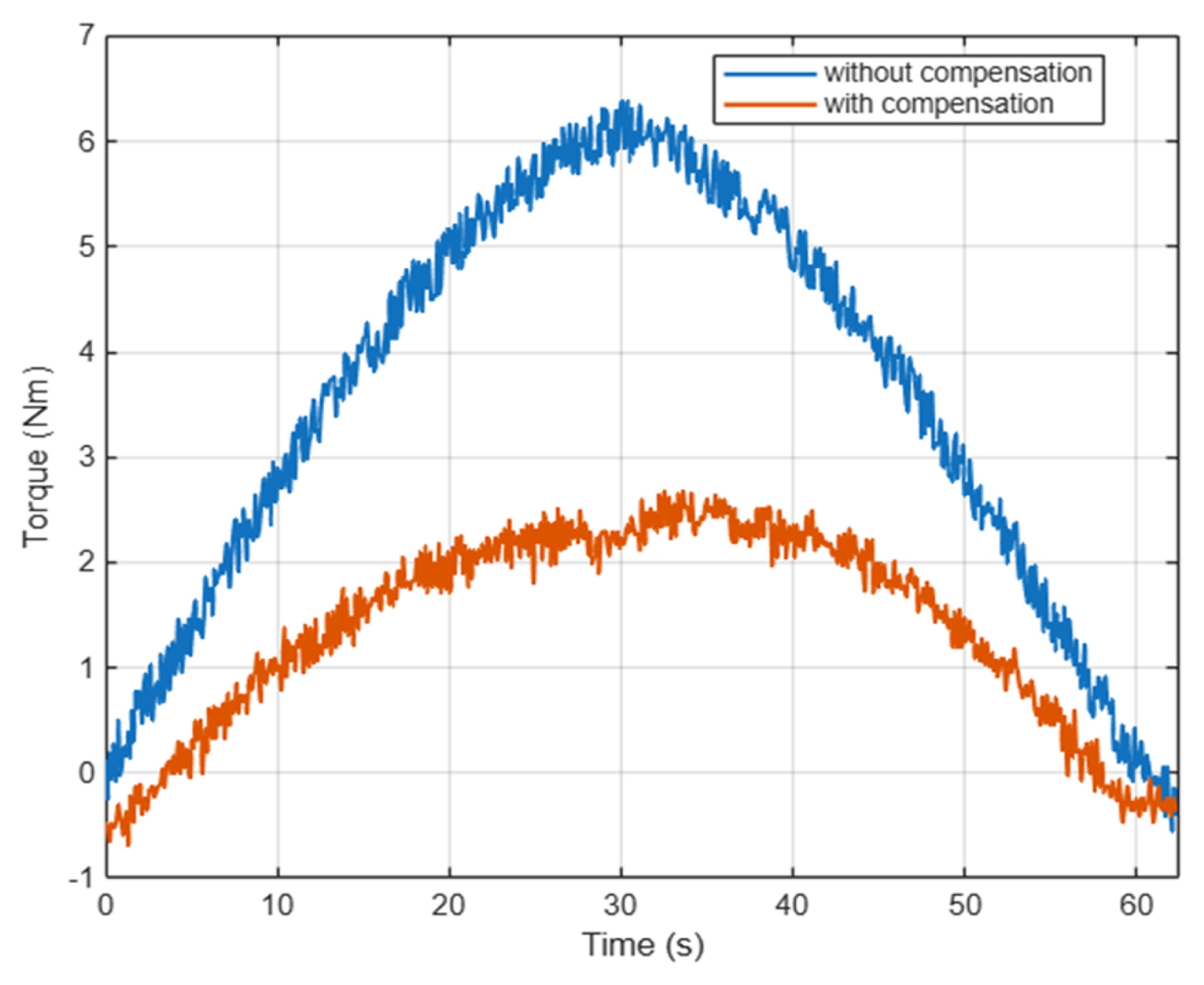
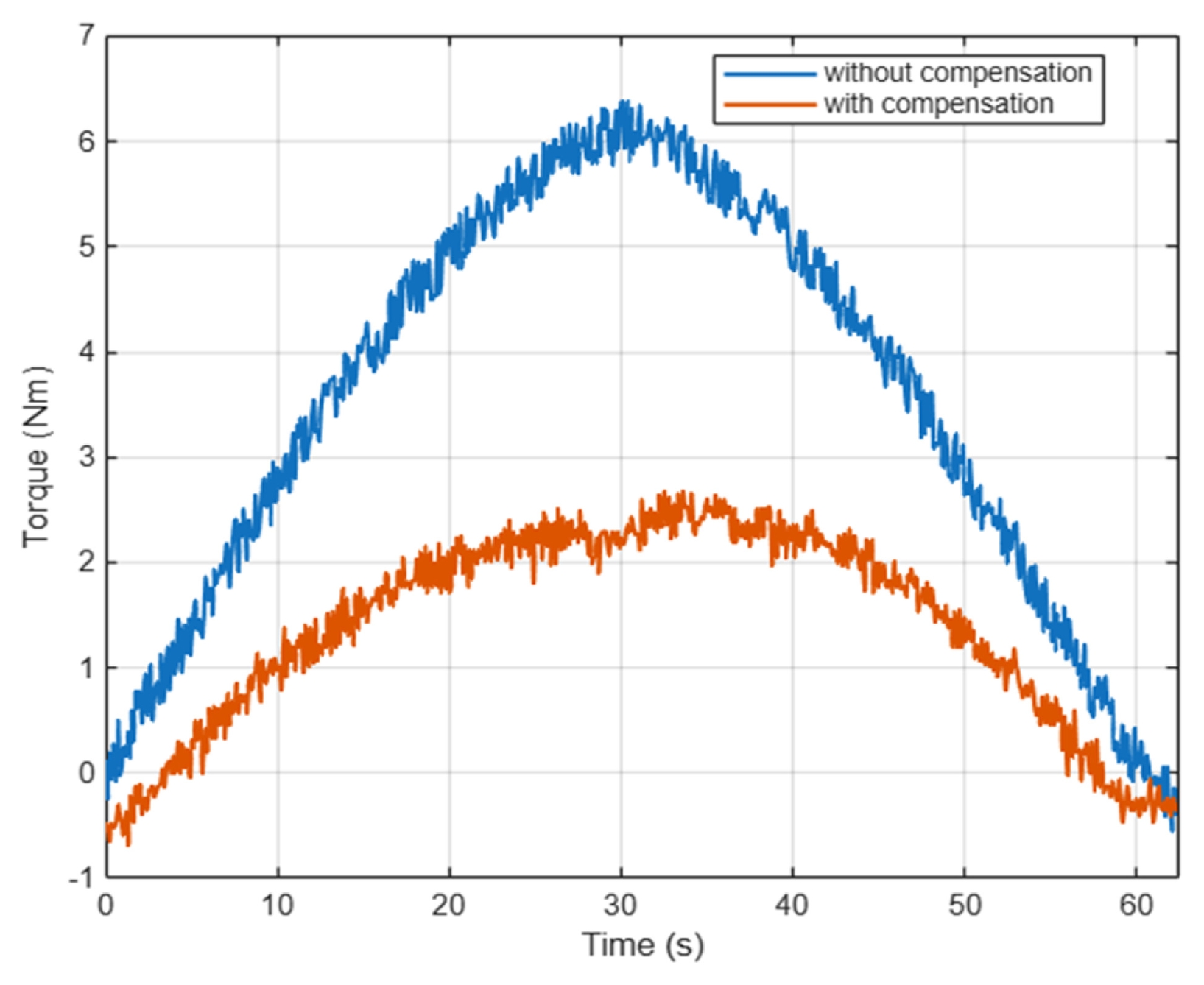
중력보상 메커니즘의 성능을 검증하기 위해, 보상 전후의 조인트 토크 그래프를
Fig. 8에 나타내었다. 링크의 피치 각도를 0o에서 80o, 그리고 다시 0o까지 변화시키며, 각 자세에서 발생하는 토크를 연속적으로 측정하였다. 4.1에서 서술한 바와 같이 초당 10개의 데이터를 수집하며, 0초에서 62.5초까지의 토크 값을 측정하였다. 보상 전 최대 조인트 토크는 약 6.18 Nm였으며, 중력보상을 적용한 후 측정된 최대 조인트 토크는 약 2.50 Nm로 나타났다. 이는 최대 조인트 토크 기준 약 63% 감소한 수치이다. 보상 토크가 직선이기 때문에 보상 후 조인트 토크가 0으로 수렴하는 것은 불가능하지만, 기대한 보상 결과는 최대 조인트 토크 기준 약 93% 감소였기에, 보상량에 손실이 일어났음을 확인할 수 있다.
보상 토크가 와이어를 통해 전달되는 과정에서 풀리 표면과의 마찰 및 미세 슬립 때문에 일부 에너지 손실이 발생한 것이 원인으로 분석된다. 또한 로봇 관절 내 구성 요소들의 기계적 마찰이 있기 때문에, 외부에서 전달된 보상 토크 일부가 해당 마찰 극복에 사용된 것으 로 파악된다. 결과적으로 중력만을 상쇄하는 데 사용될 수 있는 순수 토크가 줄어들어 이론 대비 실제 보상률이 낮아진 것으로 분석할 수 있으며, 단순히 최적화 수식에 기반한 설계변수 설정만으로는 이상적인 보상 성능을 얻기 어렵고, 실제 제작 및 적용 단계에서는 마찰 손실과 초기 장력 조건을 함께 고려해야 함을 알 수 있다.
4.2.3. 선행 연구와의 비교 분석
와이어–스프링 기반의 중력보상 메커니즘은 구조적으로 풀리–와이어 접촉부에서의 마찰 및 슬립 손실이 불가피하며, 이에 따라 이론적으로 기대되는 보상 성능 대비 실험 성능이 낮게 나타나는 경향이 있다. 이러한 특성은 본 연구에 국한된 문제가 아니라, 동일 계열의 메커니즘을 다룬 선행 연구들에서도 공통적으로 보고되고 있다.
대표적인 유사 연구로 Lee et al.[
11]은 와이어 와인딩 방식을 적용한 중력보상 메커니즘을 제안하고, 이론적으로는 중력 토크의 100% 보상을 목표로 설계하였다. 해당 연구에서는 와이어를 감는 횟수에 따라 스프링 강성을 효과적으로 저감함으로써 와이어 내구성 문제를 완화하는 구조를 제시하였다. 시뮬레이션 결과에서는 중력 토크와 보상 토크가 거의 완전히 상쇄되는 이상적인 성능을 확인하였으나, 실제 실험에서는 최대 약 57% 수준의 토크 감소가 보고되었다. 저자들은 이러한 성능 저하의 주요 원인으로 모터 감속기 및 기계 구조 전반에서 발생하는 마찰 손실을 지적하였다.
본 연구 역시 와이어–스프링 기반 메커니즘을 사용함에 따라 유사한 구조적 손실 요인이 존재하며, 이론적으로 도출된 목표 보상 성능(약 93%) 대비 실험 결과에서는 약 63%의 최대 토크 감소가 관측되었다. 이는 와이어–풀리 계면에서의 마찰, 스프링 강성 증가에 따른 와이어 장력 상승, 그리고 링크 내부 구조물과의 접촉 손실 등이 복합적으로 작용한 결과로 해석된다.
다만, 동일한 와이어 기반 메커니즘 계열 내에서 비교할 경우, 본 연구의 실험적 보상 성능은 선행 연구에서 보고된 결과보다 개선된 수준에 해당한다. 이는 타 연구에 비하여 풀리 수를 줄인 단순한 경로 구성, 평면 구조 기반의 컴팩트한 배치, 그리고 스프링 강성 k와 초기 장력 계수 A를 독립적으로 조정해 기울기, 절편을 조정할 수 있는 구조에 기인한 것으로 판단된다.
이러한 비교 결과는 와이어–스프링 기반 중력보상 메커니즘이 구조적으로 가지는 한계를 고려하였을 때, 본 연구에서 제안한 메커니즘이 동일 계열 내에서 유의미한 성능 향상을 달성하였음을 시사한다.
5. 결론
본 논문에서는 와이어–스프링 기반 평면형 중력보상 메커니즘을 제안하고, 이의 보상 성능을 해석과 실험을 통해 검증하였다. 제안한 메커니즘은 세 개의 풀리, 하나의 스프링, 하나의 와이어로 구성되며, 평면 구조로 배치함으로써 전체 시스템을 매우 간결하고 경량화된 형태로 구현할 수 있다.
해석적으로는 최소제곱법을 이용하여 설계변수를 도출하였고, 이를 기반으로 스프링 강성과 와이어 초기장력을 설정하였다. 실험에서는 이상적 모델 대비 보상 토크 직선의 기울기가 완만해지는 현상이 확인되었으며, 이는 와이어–풀리 계면에서 발생하는 마찰 손실과 초기 장력 조건에 기인하는 것으로 해석되었다. 추가 실험을 통해 k와 A의 변화가 보상 토크 특성에 미치는 영향을 검증한 결과, k는 직선의 기울기를, A는 절편을 조정하는 역할을 하며, 두 변수를 조합함으로써 목표 성능에 부합하는 보상 특성을 구현할 수 있음을 확인하였다.
본 연구는 단순하고 경량화된 중력보상 메커니즘의 실제 적용 가능성을 입증함과 동시에, 설계변수 변화에 따른 성능 조정 가능성을 실험적으로 제시했다는 점에서 의의가 있다.
향후 연구에서는 제안된 중력보상 메커니즘의 기본적인 성능 향상을 위해 와이어–풀리 계면에서 발생하는 마찰을 저감할 수 있는 구조적 및 재료적 개선 방안을 개발하고, 이에 대한 정량적 검증을 수행할 예정이다. 또한 마찰 저감 이후에는 스프링 강성 증가에 따라 발생할 수 있는 보상 토크 기울기 손실을 분석하고, 이를 수식 모델에 반영함으로써 보상 성능 예측의 정확도를 향상시키고자 한다. 나아가 본 연구에서 제안한 메커니즘을 다자유도 구조로 확장하고, 실제 협동로봇 환경에 적용하여 다양한 작업 자세 및 동작 조건에서의 적용 가능성과 성능을 검증할 계획이다.
FOOTNOTES
-
ACKNOWLEDGEMENT
이 논문은 2026년도 정부(산업통상자원부)의 재원으로 한국산업기술진흥원의 지원을 받아 수행된 연구임(RS-2024-00406796, 2026년 산업혁신인재성장지원사업)
Fig. 1Configuration of the proposed gravity compensation Mechanism
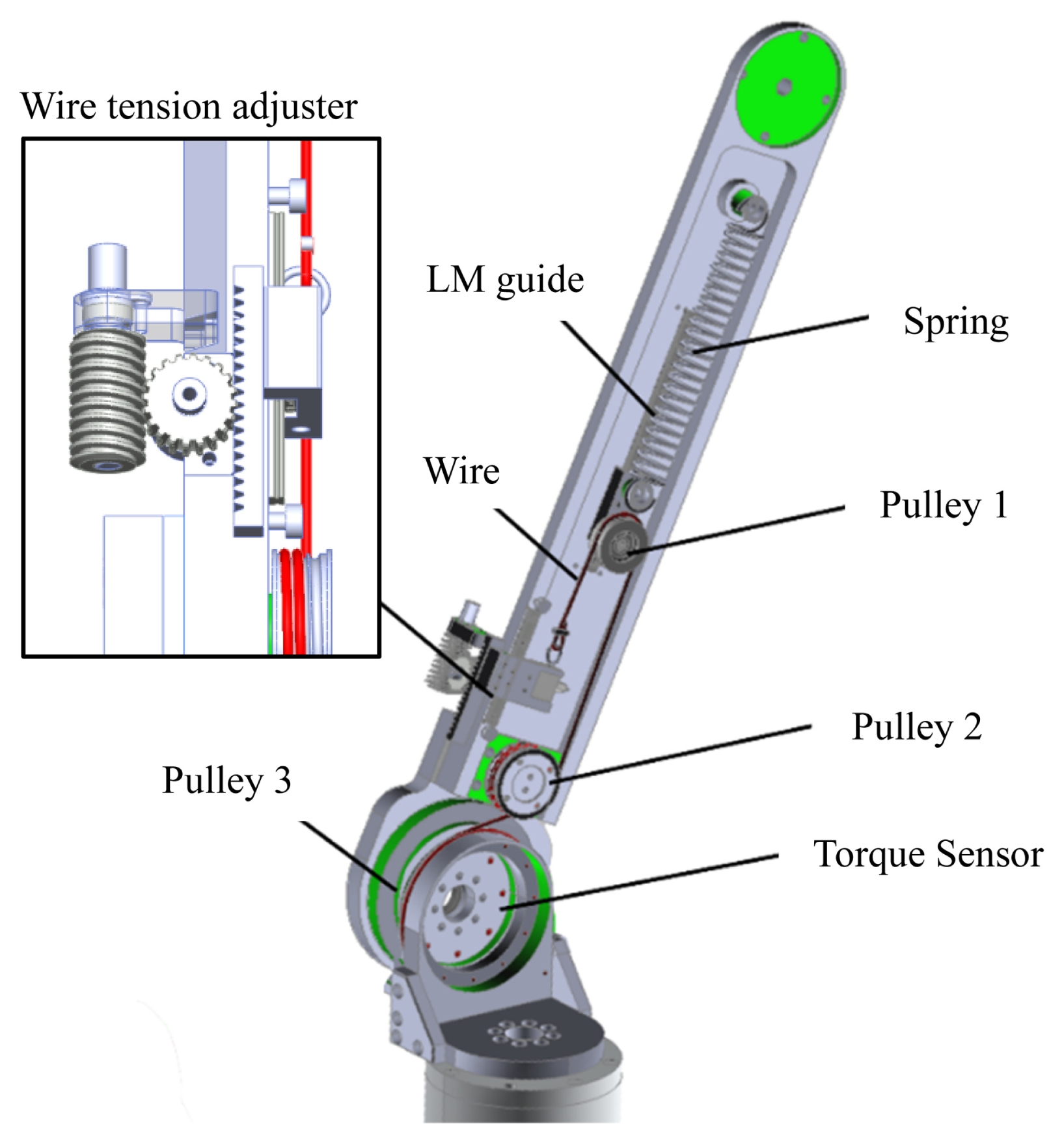
Fig. 2Variation of internal gravity compensation mechanism according to the pitch rotation angle of the link
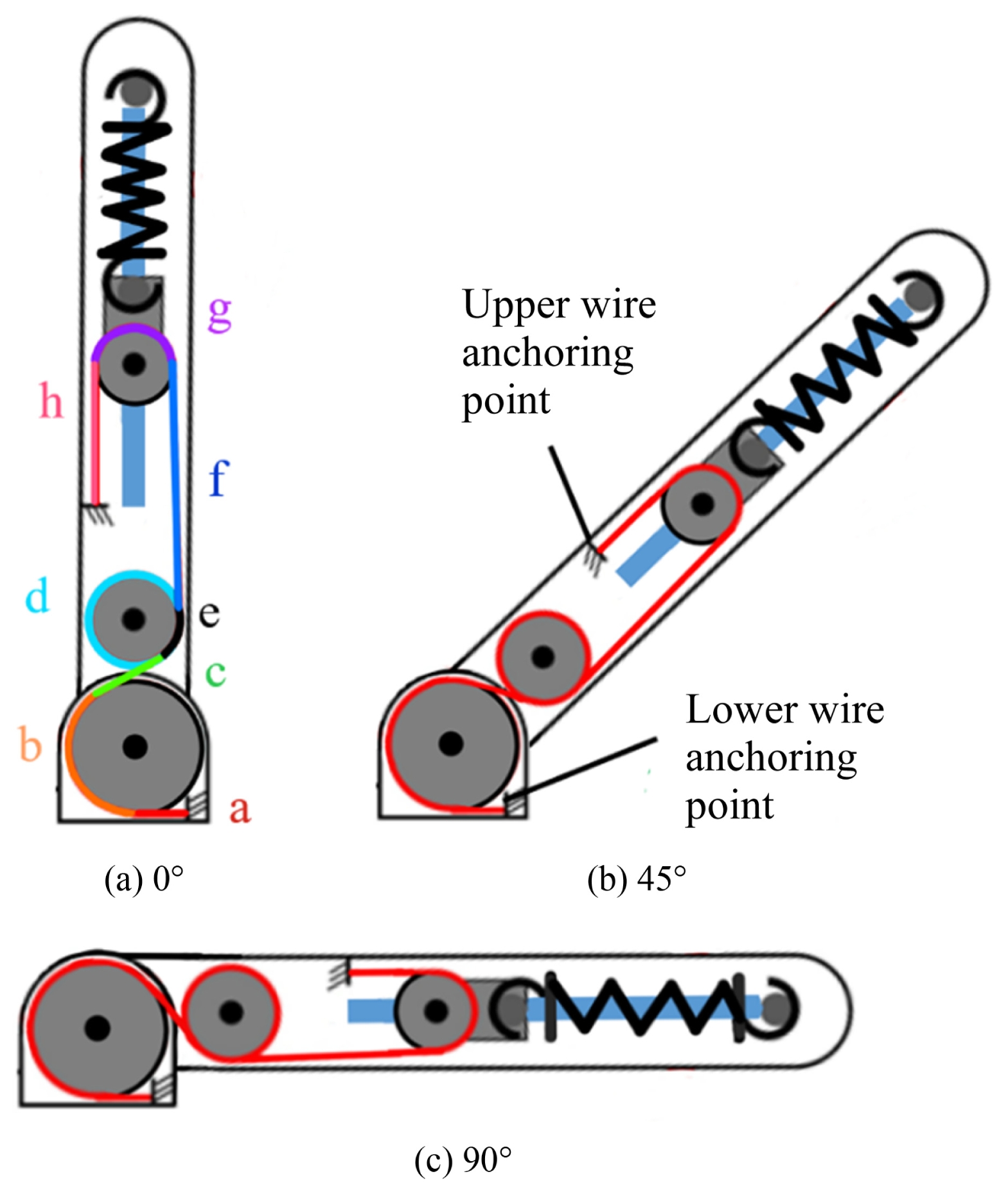
Fig. 3
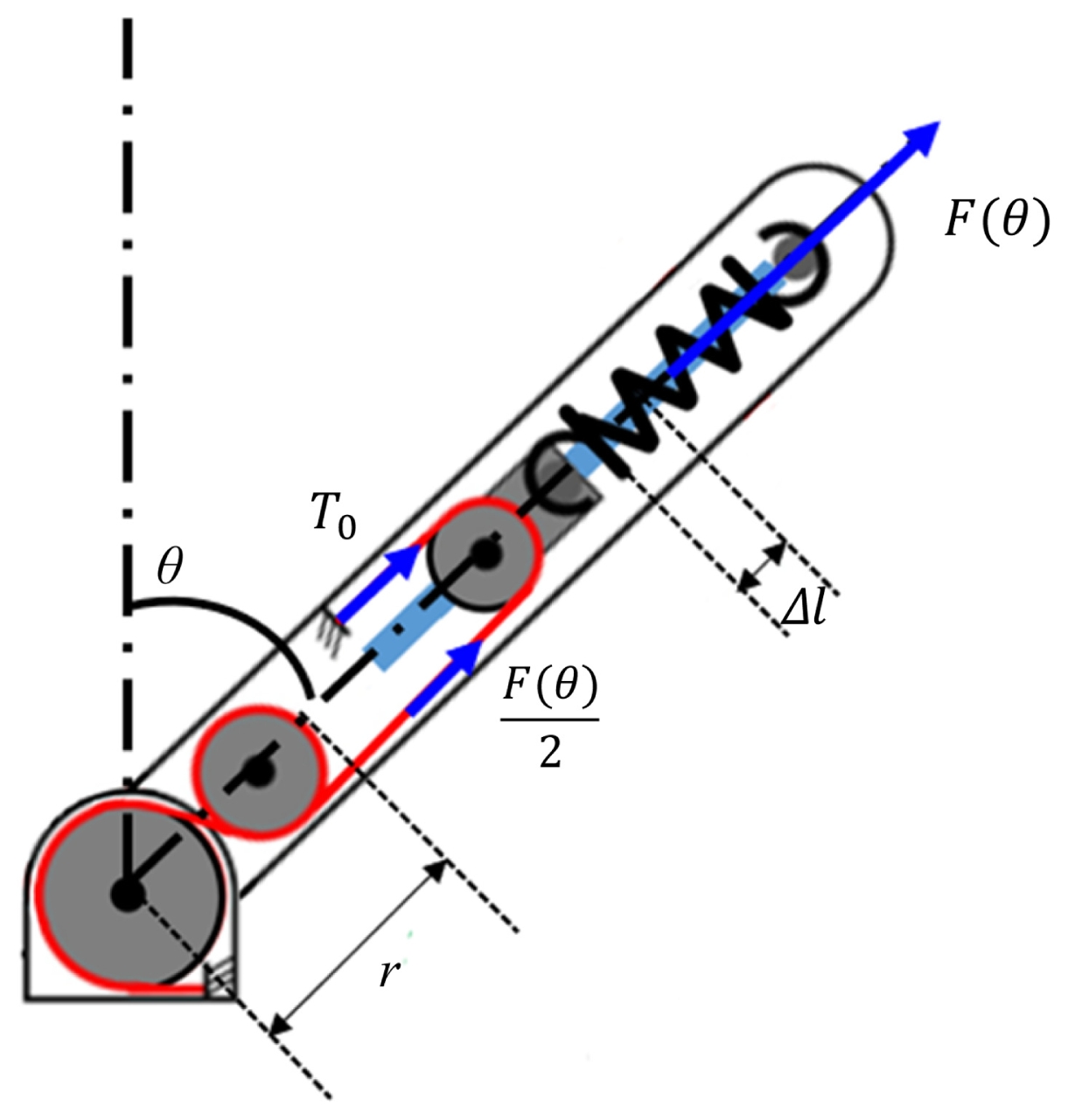
Fig. 4Wire part b end displacement mechanism
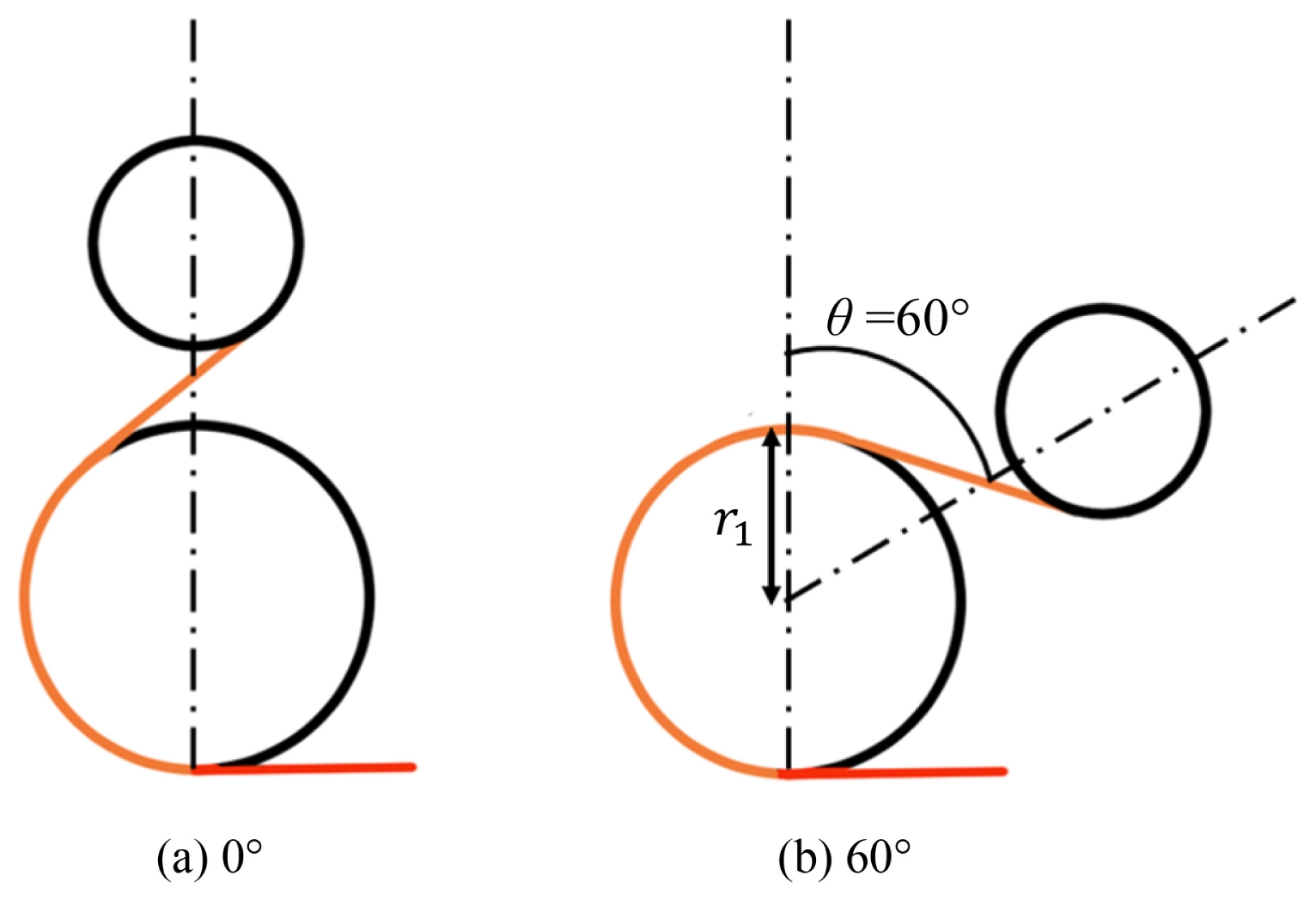
Fig. 5Comparison of joint torque and simulated compensation torques with varying parameters (k, A)
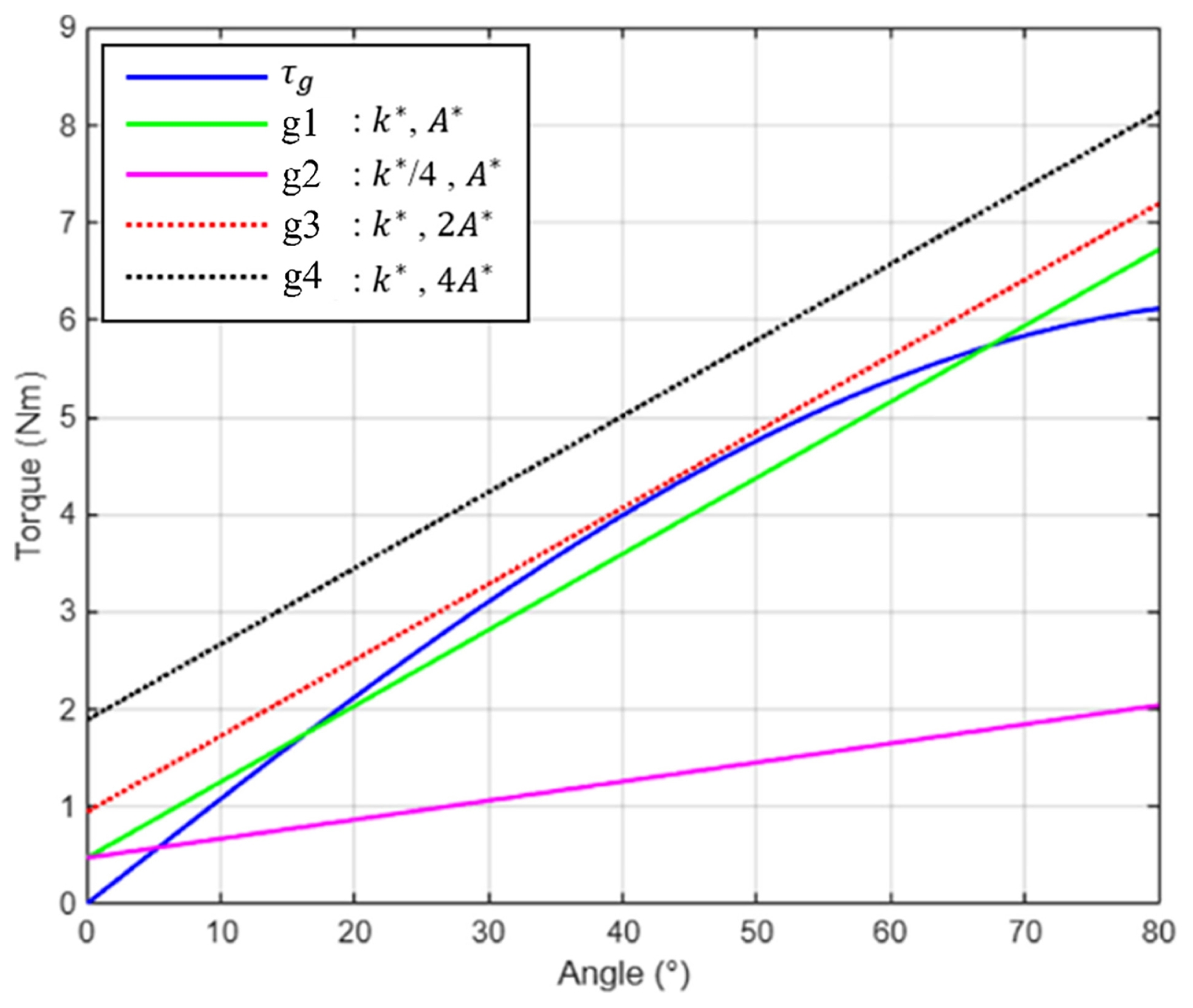
Fig. 6Prototype robot arm with integrated gravity compensation mechanism
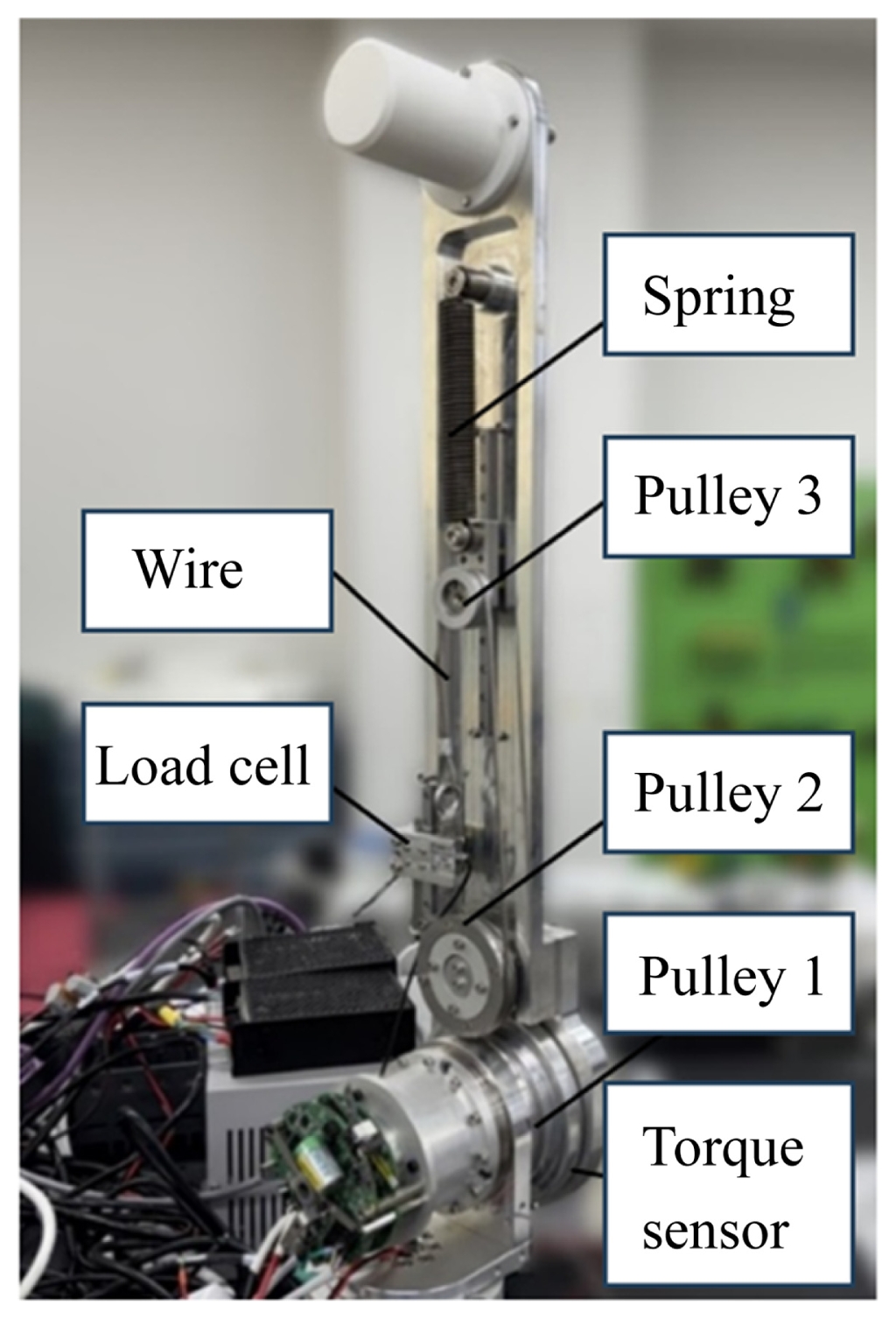
Fig. 7Generated compensation torques with varying parameters (k, A)
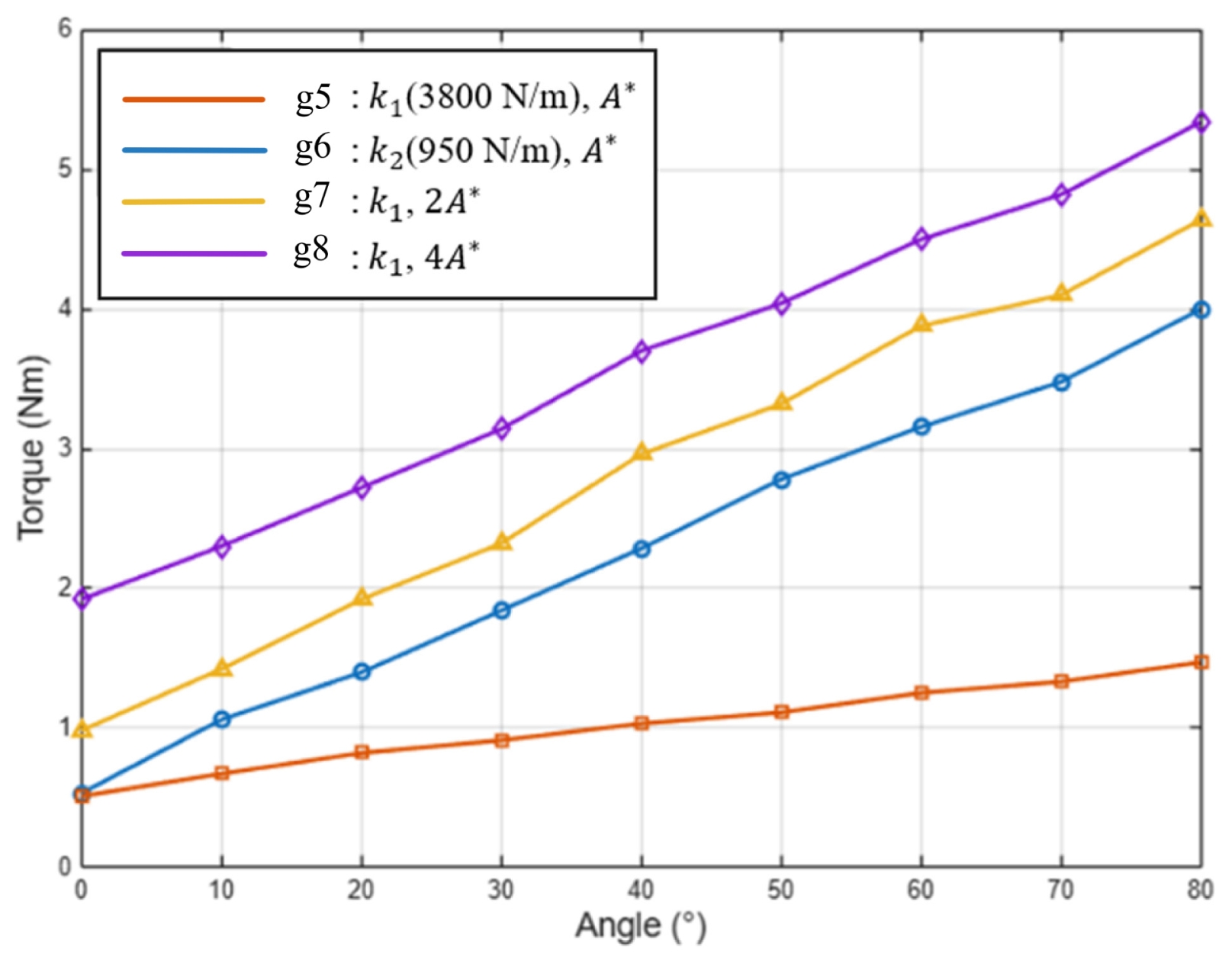
Fig. 8Comparison of joint torques before and after compensation.
REFERENCES
- 1. Lee, C., Lee, J. W., Seo, T., (2015), Geometrical velocity and force analyses on planar serial mechanisms, Journal of Institute of Control, Robotics and Systems, 21(7), 648-653.
- 2. Agrawal, S. K., Fattah, A., (2004), Gravity-balancing of spatial robotic manipulators, Mechanism and Machine Theory, 39(12), 1331-1344.
- 3. Chung, W.-K., Cho, H. S., (1988), On the dynamic characteristics of a balance puma-760 robot, IEEE Transactions on Industrial Electronics, 35(2), 222-230.
- 4. Kolarski, M., Vukobratović, M., Borovac, B., (1994), Dynamic analysis of balanced robot mechanisms, Mechanism and Machine Theory, 29(3), 427-454.
- 5. Diken, H., (1995), Effect of mass balancing on the actuator torques of a manipulator, Mechanism and Machine Theory, 30(4), 495-500.
- 6. Song, S. W., Song, J. B., (2016), Development of a 5 DOF manipulator for weight handling based on counterbalance mechanism, The Journal of Korea Robotics Society, 11(4), 242-247.
- 7. Cho, C., Lee, W., Kang, S., (2010), Static balancing of a manipulator with hemispherical work space, Proceedings of the IEEE/ASME International Conference on Advanced Intelligent Mechatronics, 1269-1274.
- 8. Ahn, K.-H., Lee, W.-B., Song, J.-B., (2016), Reduction in gravitational torques of an industrial robot equipped with 2 DOF passive counterbalance mechanisms, Proceedings of the IEEE/ RSJ International Conference on Intelligent Robots and Systems (IROS), 4344-4349.
- 9. Wongratanaphisan, T., Chew, M., (2002), Gravity compensation of spatial two-DOF serial manipulators, Journal of Robotic Systems, 19(7), 329-347.
- 10. Kang, I. H., Kim, H. S., Song, J. B., Lee, H. S., Chang, I. S., (2014), Manipulator equipped with counterbalance mechanism based on gear unit, Transactions of the Korean Society of Mechanical Engineers A, 38(3), 289-294.
- 11. Lee, D., Lee, S., Park, J., Seo, T., (2016), Novel gravity compensation mechanism by using wire-winding, Journal of Institute of Control Robotics and Systems, 22(9), 733-737.
Biography
- Kyuna Park
M.Sc. candidate in the Department of Mechanical Engineering, Pusan National University, Busan, Korea. Her research interest is robot design and control.
- Minhyo Kim
Ph.D. candidate in the Department of Mechanical Engineering, Pusan National University, Busan, Korea. His research interest is robot design and control.
- Sangrok Jin
Associate Rofessor, School of Mechanical Engineering, Pusan National University, Busan, Korea. He received his Ph. D in Mechanical Engineering from Seoul National University. His research interests are medical robot design and control.