ABSTRACT
In laparoscopic surgeries, robotic systems commonly use trocar fixation to achieve remote center motion (RCM). However, this fixation occupies the surgeon's operational space and limits surgical flexibility. It is essential to ensure adequate workspace while maintaining RCM to enhance procedural efficiency and safety. This paper introduces a novel approach to preserve RCM without relying on trocar fixation. The proposed method integrates a six-degree-of-freedom robotic arm with a dual end-effector system, employing tool coordinate storage and remote center point definition to achieve precise four-degree-of-freedom RCM motion control. To validate this method, an experimental setup with an optical tracking system was utilized to measure and calibrate the remote center position. The results indicate that the robot maintained RCM with mean positional errors of 0.672, 0.318, and 0.704 mm along the x, y, and z axes, respectively, yielding a three-dimensional mean error of 1.136 mm. These findings demonstrate the effectiveness of the method in maintaining RCM while maximizing surgical workspace and operational flexibility.
-
KEYWORDS: Trocar holding, Remote center of motion, Tool center point, Surgical assistant robot
-
KEYWORDS: 투관침 잡기, 원격 중심, 툴 중심점, 수술보조로봇
1. 서론
복강경 수술은 최소 침습 수술을 위해 복부나 흉부를 절개하는 대신 0.5-1.5 cm 크기의 작은 구멍을 뚫고 특수 카메라가 장착된 내시경을 집어넣어 복강 내를 보면서 전용 수술 도구로 수술하는 방식이다[
1]. 이러한 최소 침습 수술 기법은 기술의 발전과 함께 진화해 왔으며, 로봇 수술이라는 새로운 형태로 발전하게 되었다. 로봇을 통해 복강경 수술을 진행하는 경우 복강 내에서 손목 관절을 지닌 로봇 팔이 실시간 제어되며 개복 수술에 준하는 동작을 구현하여 기존 복강경 수술에서 기술적으로 어려운, 또는 실행 불가능한 수술을 가능하게 하였다[
2]. 현재 널리 사용되는 수술로봇의 대표적인 예로 Da Vinci 시스템(Intuitive Surgical Inc., USA)을 들 수 있다. 이 수술로봇은 수술자가 원격 콘솔에서 로봇을 조작하여 수술을 수행하기 때문에 수술자와 수술대가 분리된 형태로 운용된다. 수술자가 콘솔의 마스터 디바이스를 조작하여 복잡한 수술 동작을 제어할 수 있지만, 수술대 위에서 환자와 직접 상호작용을 하며 개입하기 어렵다. 이런 현장의 어려움을 반영하여, 최근 고사양의 수술로봇과는 다르게 수술 대에서 수술자와 함께 수술을 진행하며 보조하는 수술보조로봇도 널리 개발되고 있다. 수술보조로봇은 수술자와 동일 공간에서 직접 보조 역할을 수행하므로, 수술 도중에 수술자가 직접적인 개입이 가능하고 유연하게 대처할 수 있는 장점을 가진다. 수술 보조로봇은 수술로봇보다는 제한적인 기능을 지니고 있어, 현재 출시된 로봇들은 내시경 카메라를 잡고 조작하는 형태가 대부분 이다. 대표적인 예로 SOLOASSIST II (AKTORMED, Germany), FreeHand v2 (FreeHand 2010 Ltd., UK), ViKY EP (EndoControl, France) 와 같은 수술보조로봇들이 있다.
복강경 수술에서 환자의 수술 부위에 수술도구가 삽입되는 통로에는 투관침(Trocar)이 삽입되어 있다. 로봇을 활용한 수술에서는 로봇 팔이 움직이더라도 투관침이 삽입된 위치가 고정되도록 유지하는 것이 중요하다. 투관침 삽입 지점을 중심으로 도구가 움직이도록 유지하는 것은 원격중심운동(RCM, Remote Center Motion)으로 정의할 수 있다. 복강경 수술에 있어 원격중심운동은 수술 도구 투관침을 통해 움직이면서도 삽입 지점을 기준으로 4자유도 운동(Roll, Pitch, Yaw, Linear Translation)을 구현하는 것을 의미한다. 4자유도 운동을 통해 내시경 카메라의 회전과 전후진을 수행한다. 투관침의 삽입 지점은 수술 중 피부나 조직을 뚫고 수술 도구가 들어가는 고정된 지점으로, 이를 기준으로 원격중심운동을 수행해야 안전한 수술을 가능하게 한다. 따라서, 수술보조로봇을 통해 안정적으로 수술을 보조하기 위해서는 이러한 4자유도 원격중심운동이 필수적이다[
3].
원격중심운동을 달성하기 위한 연구는 크게 기구적 방식과 제어적 방식으로 나눌 수 있다. 기구적 방식은 기계적인 설계와 기구학적 구조를 기반으로 원격중심운동을 구현하는 방법으로, Z-바 형태의 기구[
4,
5]나 병렬구조 메커니즘[
6,
7]이 주로 사용된다. 기구적 방식은 원격중심 위치를 엄격하게 유지하여 안전하기 때문에 앞서 언급한 Da Vinci 시스템 등 많은 수술로봇 및 수술보조로봇에서 널리 사용되고 있다. 그러나 기구적 방식은 병렬구조와 같이 공간을 비교적 많이 차지하는 메커니즘을 지니고 있어 수술대에서 의료진과 함께 협업하는 작업에는 적합하지 않다. 제어적 방식은 기구적인 제한 없이 로봇 팔의 기구학 모델에 근거하여 원격중심운동을 실시간 제어한다. 일반적인 직렬구조의 로봇 팔로 구현 가능하기 때문에 작은 공간 내에 로봇을 운용할 수 있어 주변 의료진 및 수술 도구들과의 충돌을 줄일 수 있으며, 실제 의료진이 수술을 수행할 때 움직이는 방식과 같은 거동을 구현한다. 위치 제어로 원격중심점을 고정하고 나머지 회전 운동만으로 원격중심운동을 구현하거나[
8], 어드미턴스 제어(Admittance Control)를 통해 사용자가 로봇 도구를 직접 조작하면서도 RCM과 도구의 공간 제약을 유지하는 연구가 제안되었다[
9]. 또한 투관침을 효과적으로 고정하는 RCM-constrained Jacobian 행렬을 이용하여 능동적인 제어를 수행하는 연구[
10]와 퍼지 근사(Fuzzy Approximation)기반 작업 공간 제어를 적용하여 동적 불확실성과 외란을 보정하면서도 RCM 제약을 만족시키는 제어 기법도 제시되고 있다[
11].
기구적 방식은 투관침이 로봇 끝부분에 고정되어야 하고 이에 따라 로봇이 환자 가까이에 위치해야 해서 수술 중 주변의 의료진 및 다른 수술 도구들과 충돌이 발생하기 쉽다. 제어적 방식의 로봇 중에도 제어 편이성으로 투관침을 로봇에 고정하고 동작하는 로봇들이 있는데 이는 기구적 방식처럼 수술대 위에서 주변부와의 간섭으로 사용성 저하를 가져온다. 본 논문에서는 일반적인 6자유도 협동로봇을 활용하여 별도의 장비 없이 원격중심위치를 정의할 수 있으며, 투관침을 로봇에 고정하지 않고 원격중심운동을 구현하는 방법을 제시하고 보다 수술현장에 친화적인 수술보조로봇의 형태를 보인다.
본 논문의 구성은 다음과 같다. 제2장에서는 투관침을 잡지 않는 수술보조로봇의 구성요소에 대해 다루고 기존의 수술보조로봇과의 차이점을 비교한다. 제3장에서는 투관침을 잡지 않고 원격중심운동을 구현하는 방법에 관해 설명하고, 제4장에서는 원격중심 위치 유지 성능에 대한 실험 및 결과를 다룬다. 마지막으로 제5장은 결론으로 앞선 내용을 정리하고 연구 결과에 대한 기여 및 의의를 제시하였다.
2. 수술보조로봇의 구조적 차이 비교
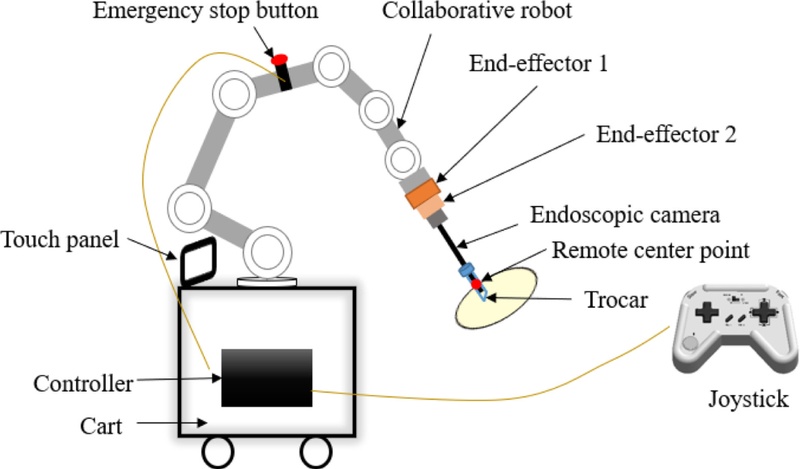
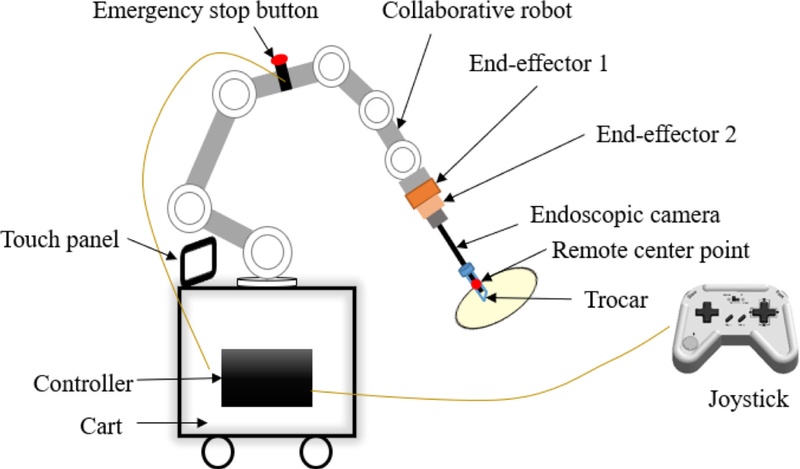
본 논문에서 제안하는 수술보조로봇은 수술 중 내시경 카메라를 잡고 수술자를 보조하는 로봇으로, 일반적인 6자유도 협동로봇을 바탕으로 구성된다. 협동로봇은 직접교시를 통해 수술 중 수술자와 직접적인 상호작용이 가능하며 외력에 민감하게 반응하여 정지하는 안전기능이 있어 수술보조로봇으로 적합하다. 협동로봇 플랜지에 수술보조에 특화된 엔드이펙터가 장착된다. 투관침을 잡지 않고 동작하는 로봇의 엔드이펙터는
Fig. 1과 같이 수술 전 투관침의 위치를 인지하는 엔드이펙터1과 내시경 카메라를 장착하는 엔드이펙터2로 구성되며 서로 결합하여 사용된다. 로봇 팔은 높낮이 조절이 되는 전용 카트에 장착하여 운용한다. 직접교시로 로봇을 조작할 수 있고 조이스틱을 사용할 수도 있다. 페달과 같은 입력장치를 연결할 수도 있고, 추후 인공지능을 활용하여 음성인식이나 수술 도구 추적과 같은 기능을 부가할 수 있다.
Fig. 1 Concept of surgical assistant robot without holding trocars
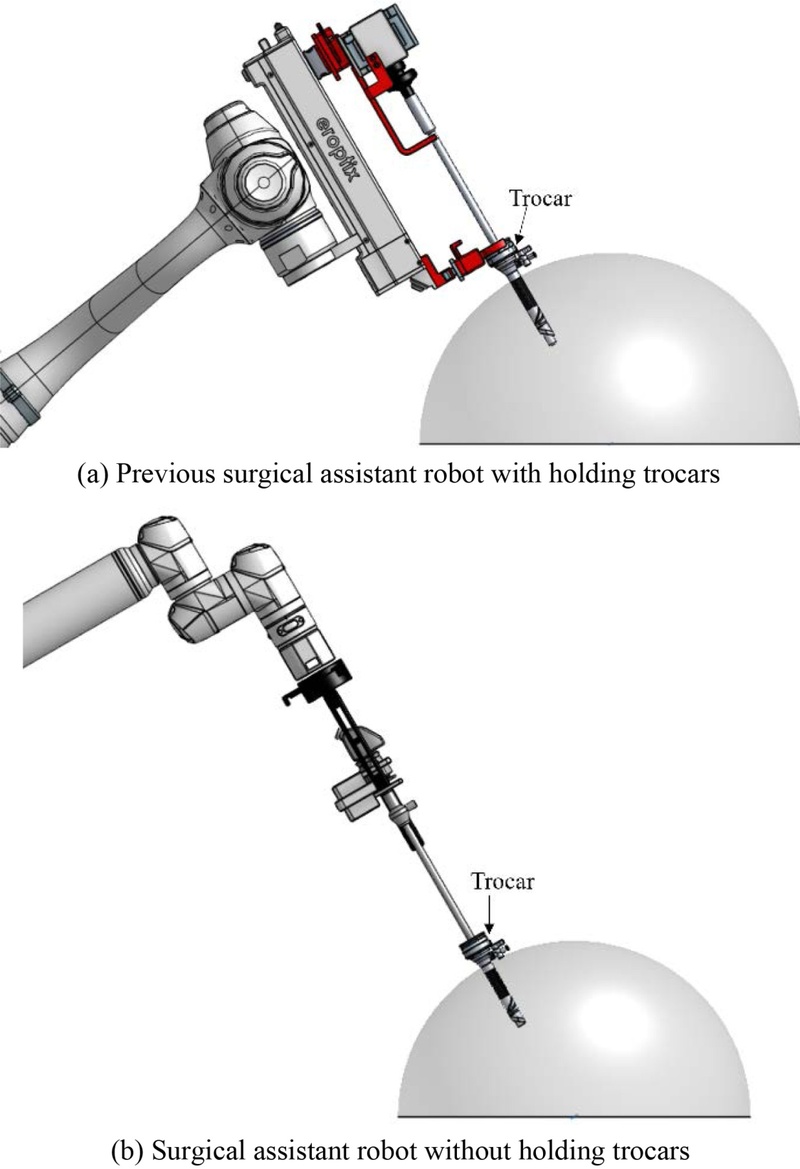
기존의 Da Vinci 수술로봇이나 다른 수술보조로봇과의 가장 큰 차이는 투관침이 로봇에 고정되어 있지 않다는 것이다. 투관침을 로봇 끝에 고정하여 동작하는 수술보조로봇으로는
Fig. 2(a)와 같은 로봇(EROPTIX, EROP Co., Ltd, Korea)이 있다. EROPTIX도 6자유도 협동로봇을 사용하고 있지만 전/후진 운동을 독립적으로 구현할 수 있는 엔드이펙터를 지니고 있으며 엔드이펙터 하단에 투관침을 고정한다[
12]. 투관침이 엔드이펙터에 고정되어 있으므로 로봇 팔의 플랜지 기준으로 일정한 거리의 툴 중심 점(TCP, Tool Center Point)을 정의할 수 있고, 로봇 팔은 이를 기준으로 3자유도 회전 운동(Roll, Pitch, Yaw)만 하여 원격중심 운동을 구현하며 나머지 1자유도는 엔드이펙터의 전/후진 구동부를 통해 구현한다. 3자유도 원격중심운동은 일반적인 협동로봇에 내장되어 있는 툴 중심점 고정 운동 기능을 이용하여 안전하고 쉽게 구현할 수 있다. 점 고정 운동 기능은 로봇에 정의된 TCP를 기준으로 위치 이동 없이 3자유도 회전 운동만 하는 기능을 뜻한다. 그러나 구동기를 지닌 엔드이펙터가 항상 수술부위에 근접하여 움직이기 때문에 주변과의 간섭이 일어날 확률이 높고 구동 범위에도 제약이 있다. 로봇의 자유도 관점에서도 여유자유도가 존재하여 자유도를 최적화할 여지가 남아있는 구조이다.
Fig. 2. Modeling of surgical assistant robot
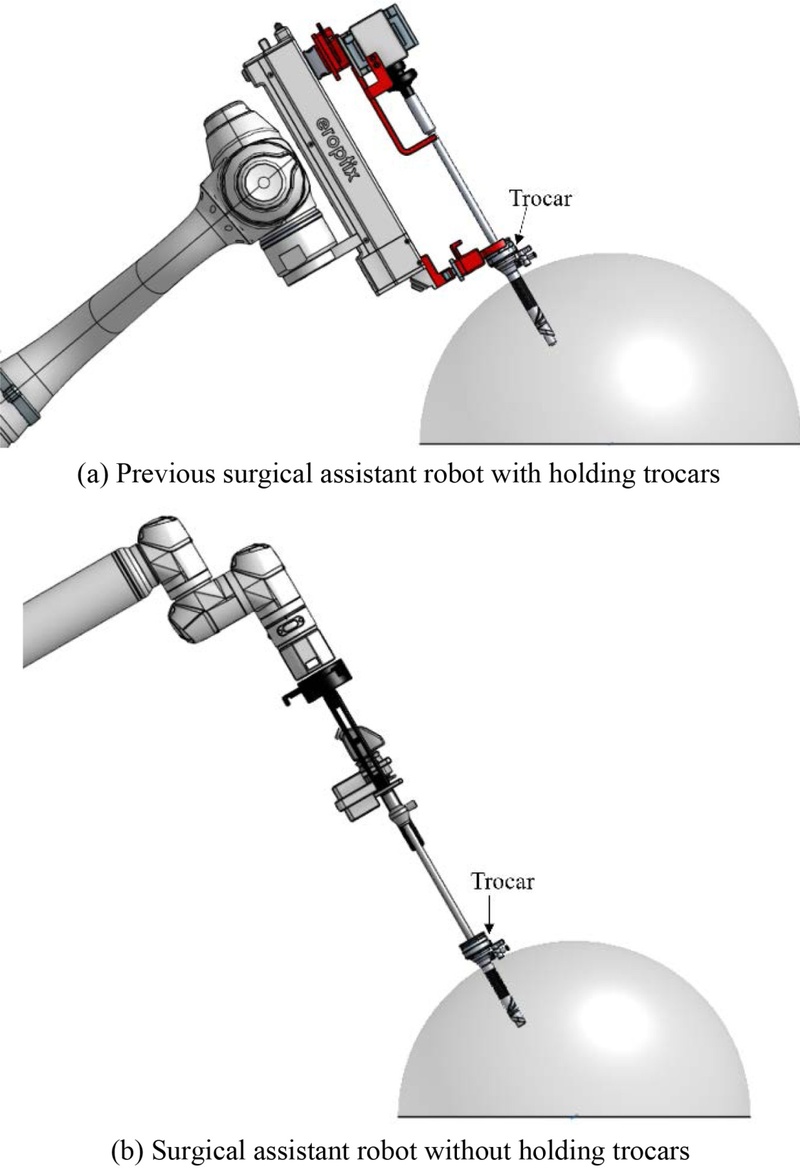
본 논문에서 제안하는 수술보조로봇은
Fig. 2(b)와 같이 투관침을 로봇에 고정하지 않고 엔드이펙터는 내시경 카메라만을 잡고 원격중심운동을 구현한다. 실제 의료현장에서 의료진이 내시경 카메라는 잡고 조작하는 것과 같은 방식이다. 엔드이펙터에 추가적인 구동부가 필요 없기 때문에 로봇의 구성이 단순해지고 로봇 플랜지 위치가 투관침과 멀어져 주변부와의 간섭이 감소한다. 그러나 이런 구조로 원격중심운동을 구현하려면 동작에 앞서 원격중심점의 위치를 로봇 제어기에 정의하는 절차가 필요하고 내시경의 전진 및 후퇴 운동에 따라 로봇 플랜지로부터 원격중심점까지의 거리를 추정하는 기능이 제어 알고리즘에 포함되어야 한다.
3. 수술 보조 로봇의 원격중심운동
본 연구는 6자유도 협동로봇 팔을 기반으로 투관침을 잡지 않고도 4자유도의 원격중심운동을 구현하는 방법을 제안한다. 먼저 수술 전 투관침의 위치를 정의하여 제어기에 입력하는 절차를 설계하고, 내시경 카메라의 전/후진 운동에 따라 TCP를 재정의하고 점 고정 운동 기능을 통해 원격중심운동을 구현한다.
3.1 투관침 고정 없는 원격중심 위치 정의 방법
복강경 수술에 따라 내시경 카메라 및 투관침이 삽입될 위치가 결정되고, 수술 중 투관침의 위치가 변경되는 일은 거의 발생하지 않기 때문에 로봇을 이용한 카메라 삽입 전에 한 번만 원격중심 위치를 정의하면 된다. 협동로봇의 직접교시 기능을 활용하여 일반 의료진들이 직관적으로 쉽게 원격중심을 정의하는 방법을 설계했다.
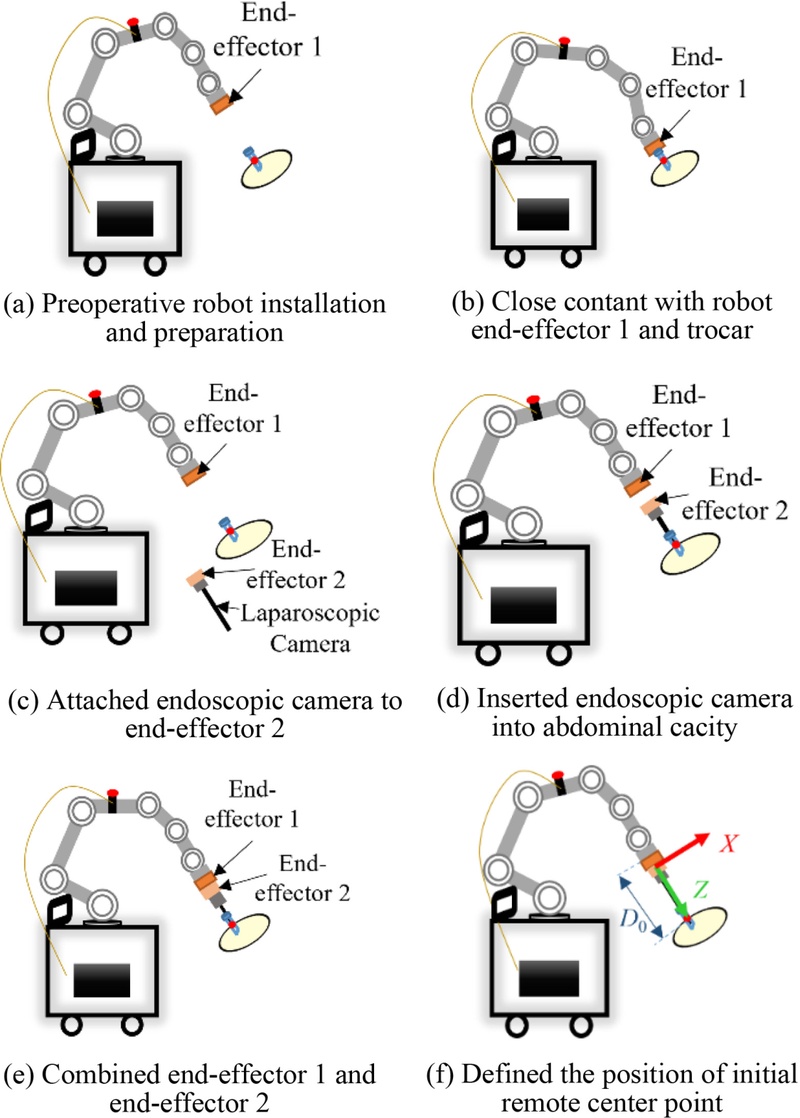
수술보조로봇이 원격중심점을 정의하고 내시경 카메라를 투관침을 통해 삽입하는 과정을
Fig. 3과 같이 설계했다. 그림의 각 단계에 대한 설명은 다음과 같다.
Fig. 3.Procedure for defining the position of a remote center point
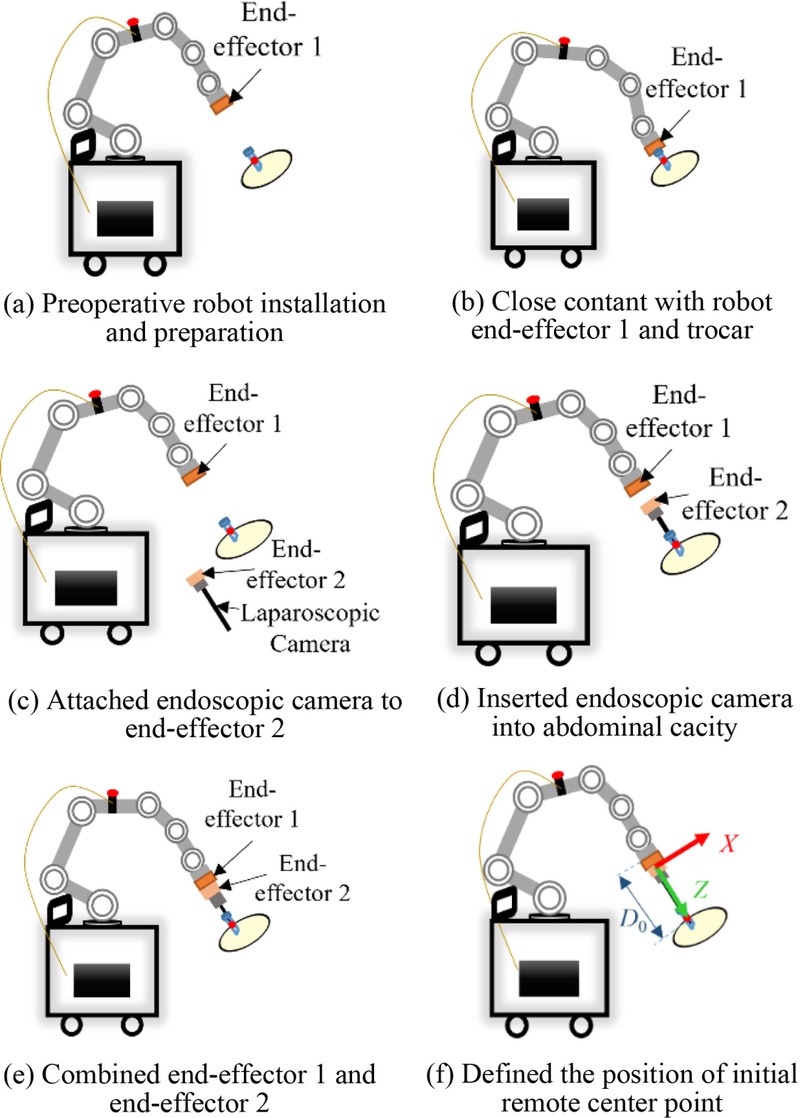
(a) 협동로봇의 끝단 플랜지에 엔드이펙터1은 미리 장착된 상태로 로봇 카트를 해당 수술에 맞춰 수술대 옆으로 위치시킨다.
(b) 협동로봇의 직접교시 기능을 이용하여 의료진이 로봇 팔을 손으로 끌어와 수술 부위에 삽입된 투관침과 엔드이펙터1을 접촉한다. 엔드이펙터1은 투관침의 윗면과 정확하게 접촉하기 용이한 형태를 지니고 있어 투관침의 중심과 엔드이펙터1의 중심이 일직선상에 위치되도록 정렬된다. 이 단계가 가장 중요한 단계로 투관침이 엔드이펙터1에 정확하게 면 접촉이 되어야 투관침의 위치뿐 아니라 방향도 추정할 수 있다. 투관침과 엔드이펙터1이 정확하게 접촉된 상태의 로봇 자세에 대한 기구학을 분석하면 현재 로봇 플랜지의 위치 및 자세를 산출할 수 있고, 이를 바탕으로 투관침의 삽입 길이만큼을 고려하여 환산하면 원격중심점의 위치를 정의한다. 이때 원격중심점 위치는 로봇 플랜지 기준의 TCP로 저장한다.
(c) TCP가 지정된 상태에서 협동로봇에 내장된 선 고정 운동 기능을 사용하여 직접교시하면 투관침 중심선의 방향으로 후퇴할 수 있고 내시경 카메라를 장착하고 삽입할 공간을 확보한다. 선 고정 운동이란 로봇에 정의된 TCP 기준으로 로봇 플랜지의 동축 방향으로의 병진 운동과 회전 운동만 가능한 기능을 뜻한다. 조이스틱을 사용하여 줌 아웃과 같은 효과로 후퇴 구동을 할 수도 있다. 엔드이펙터2에 내시경 카메라를 장착하여 삽입을 준비한다.
(d) 먼저 엔드이펙터2에 장착된 내시경 카메라를 투관침을 통해 환자의 복강 내에 삽입한다.
(e) 직접교시로 선 고정 운동을 하여 로봇을 끌고 오거나 조이스틱을 이용하여 줌 인과 같은 효과로 전진 구동을 하여 로봇의 엔드이펙터1을 엔드이펙터2와 결합한다.
(f) 내시경 카메라가 장착된 엔드이펙터2와 로봇 플랜지에 장착된 엔드이펙터1이 결합한 상태의 로봇 자세 기구학을 분석하면 로봇 플랜지의 위치가 Z-방향으로 얼마나 이동되었는지 추정이 가능하고 그 값을 바탕으로 로봇 툴 플랜지로부터 원격중심점까지의 거리 D0를 도출하여 초기 원격중심점을 TCP로 재정의한다.
앞서 설계한 원격중심점 위치 정의 절차는 협동로봇에 내장되어 검증된 기능들을 최대한 활용하여 안전성을 확보하고 불필요한 코딩을 최소화할 수 있다. 직접교시를 지시하기 위해 투관침에 접촉 완료 및 두 엔드이펙터의 결합 완료를 통보하는 버튼은 엔드이펙터에 설치하고 로봇 플랜지의 포트를 통해 로봇 제어기로 전달할 수 있다. 로봇 플랜지로부터 Z-방향으로 D0만큼 떨어진 위치를 TCP로 설정한 상태로 점 고정 운동 기능을 사용하면 Roll, Pitch, Yaw의 3자유도 운동을 제어함으로써 원격중심운동이 구현된다. 수술 시작 전에 1회 접촉을 통한 원격중심점 정의를 하면 이후에는 화면의 줌 인/아웃을 위한 내시경 카메라의 전/후진 움직임 후에도 변화된 상대 위치를 중심으로 원격중심운동을 유지할 수 있다.
수술 중에는 투관침의 위치가 변경되는 일이 거의 발생하지 않지만, 특수한 상황이 발생하여 수술 중 다른 위치에 카메라를 삽입해야 하는 상황이 발생한다면
Fig. 3(b)단계부터 다시 시행하여 원격중심 위치를 새로 정의해야 한다.
원격중심점의 위치가 정의된 상태에서 원격중심운동 제어 전략은 협동로봇의 TCP 기준점 고정 운동 기능과 내시경 카메라의 전/후진에 따른 TCP 재정의로 이루어져 있다. 핵심은 엔드이펙터의 전/후진 구동부 없이 원격중심으로부터 로봇 플랜지가 전/후진하여 줌 인/아웃 움직임을 구현하는 것이다. 현재 상태에서는 주로 조이스틱으로 조작되도록 설계되었지만, 점 고정 운동의 직접교시 감도가 개선될 경우 직접교시도 가능하고 인공지능을 활용한 음성 인식 및 수술 도구 추적 기능을 구현해도 같은 원리로 제어할 수 있다.
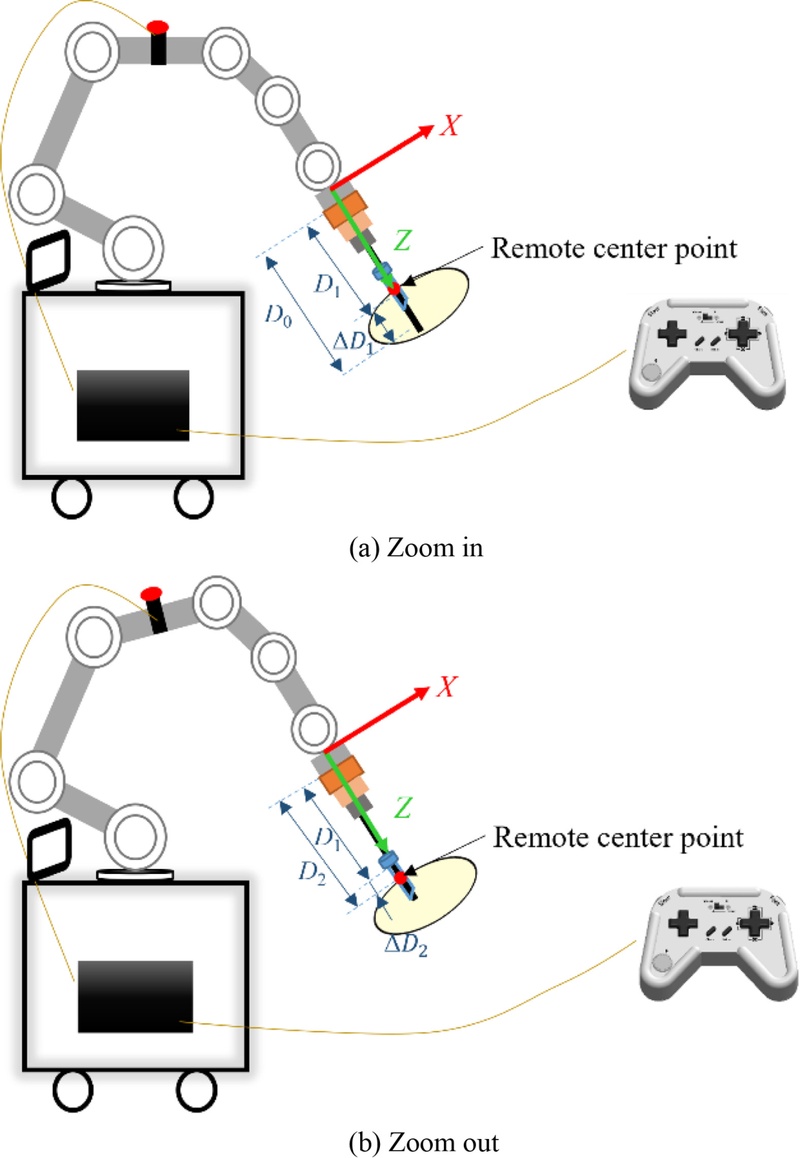
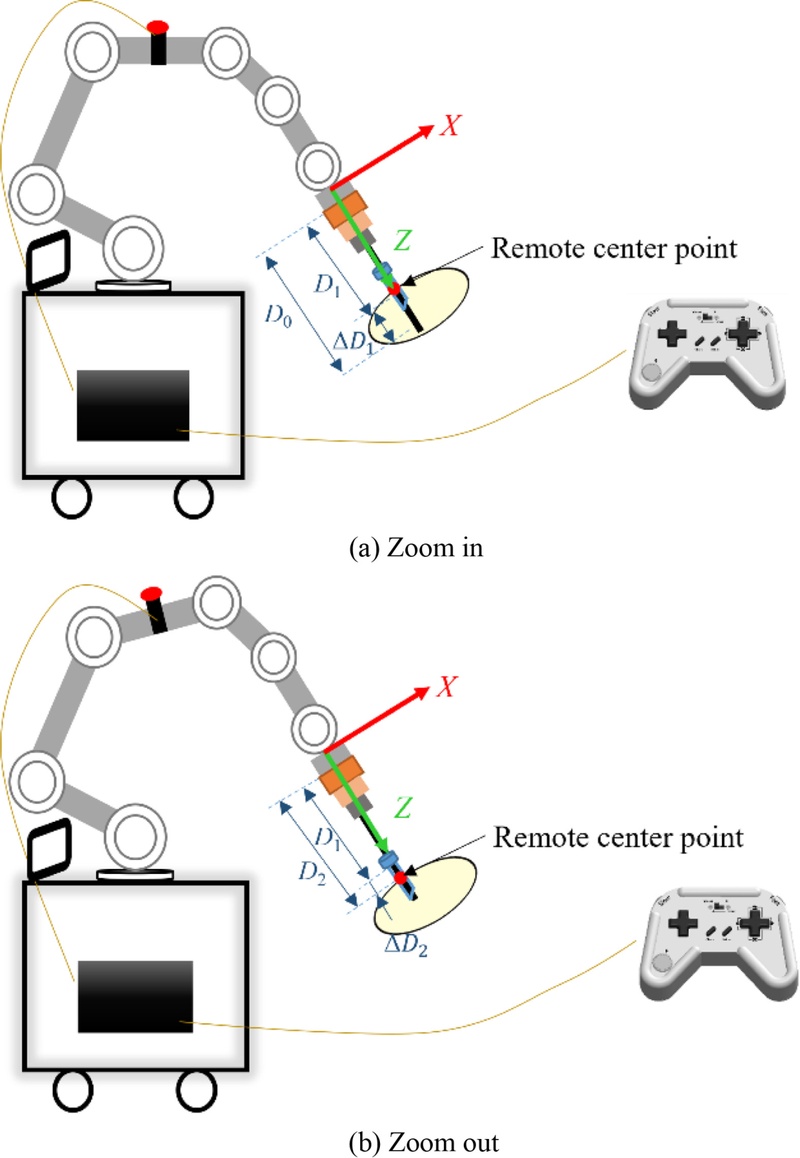
조이스틱에서 줌 인 버튼을 누르면 툴 프레임의 Z-방향으로 전진하며 이동하다가 버튼을 떼면 멈춘다. 이동한 거리
ΔD1 만큼
식(1)과 같이 플랜지로부터 원격중심 점까지 거리를 계산하고
Fig. 4(a)와 같이 TCP를 갱신한다. 이후 조이스틱으로 Roll, Pitch, Yaw의 3자유도 운동을 입력하면 갱신된 TCP를 기준으로 원격중심운동을 한다. 줌 인 운동과 마찬가지로, 조이스틱에서 줌 아웃 버튼을 누르면 툴 프레임의 Z-방향으로 후진하며 이동하다가 버튼을 떼면 멈춘다. 이동한 거리 Δ
D2만큼
식(2)와 같이 플랜지로부터 원격중심 점까지 거리를 계산하고
Fig. 4(b)와 같이 TCP를 갱신한다. 이후 조이스틱으로 Roll, Pitch, Yaw의 3자 유도 운동을 입력하면 갱신된 TCP를 기준으로 원격중심운동을 한다.
Fig. 4Control strategy of remote center motion performed by redefining the distance from the remote center point
외부에서 관측할 때는 원격중심의 변화가 없이 유지되지만, 로봇 관점에서는 플랜지 기준의 TCP가 상대적으로 변경되면서 원격중심운동을 제어하는 방식이다. 이 방법을 사용하면 별도의 고정부나 센서 없이도 초기 위치 저장만으로 원격중심운동을 제어할 수 있다. TCP 변경 거리는 안전을 위해 최솟값과 최댓값을 설정해 놓고 범위 내로만 조작되도록 한다.
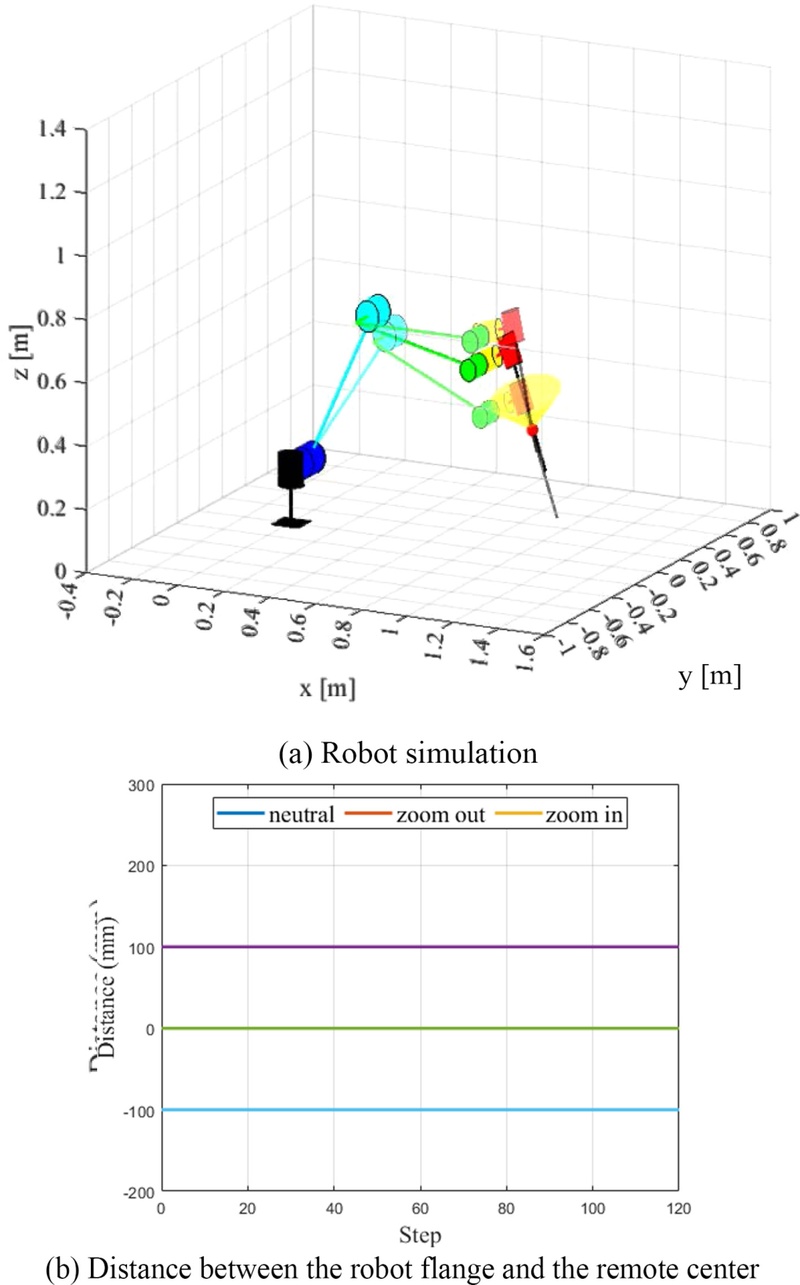
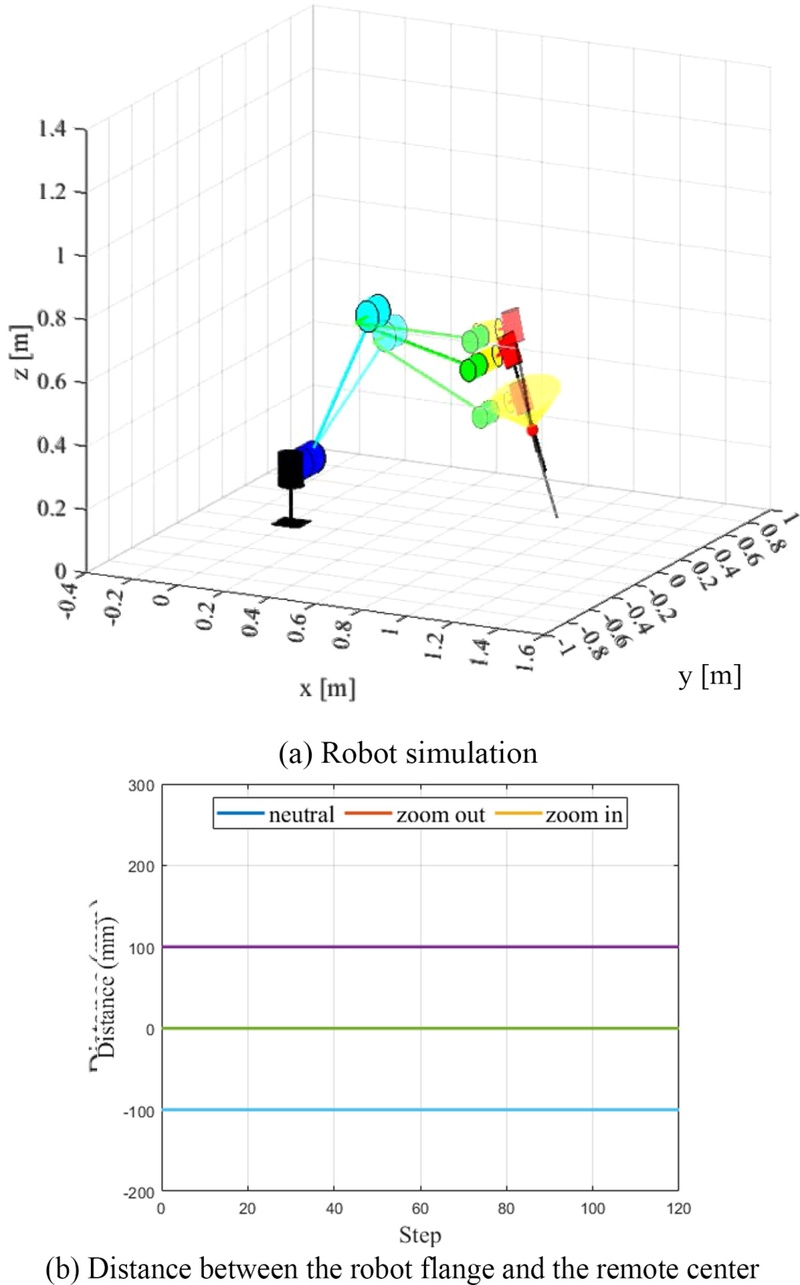
제안된 제어 전략을 검증하기 위해
Fig. 5(a)와 같이 MATLAB(MathWorks, MA, USA)을 사용하여 시뮬레이션을 수행했다. 카메라의 줌 인/아웃에 해당하는 전후진 운동을 한 후 원뿔 형태의 원격중심운동을 하며 로봇 플랜지와 원격중심점과의 거리를 관찰한다. 원격중심운동을 수행하는 동안
Fig. 5(b) 각 거리가 오차없이 일정하게 유지되는 것을 볼 수 있다.
Fig. 5Control strategy of remote center motion performed by redefining the distance from the remote center point
수술 중 카메라를 체내에서 빼내어 세척하고 다시 삽입하는 일이 빈번하게 발생한다. 카메라 재삽입에도 원격중심을 새로 정의할 필요가 없어야 한다. 카메라 세척이나 수술 종료로 카메라를 분리할 때는 조이스틱으로 줌 아웃 명령을 입력하여 로봇이 원격중심으로부터 충분히 후진하도록 한 후 엔드이펙터1과 엔드이펙터2를 분리한다. 이후 내시경 카메라가 장착된 엔드이펙터2를 투관침으로 빼내어 세척하거나 수술을 종료한다. 세척 후 다시 카메라를 삽입하고 수술을 재개할 때는
Fig. 3(c) 부터 과정을 반복하면 된다. 제안된 방법의 한계점은 전후진 운동을 하면서 동시에 원격중심운동을 하는 것이 어렵다는 것이다. 그러나 임상 현장에서 안전을 위한 관점 및 조이스틱의 조작이 분리되어 있어 수술 중 로봇으로 카메라를 삽입하면서 동시에 기울이는 조작은 발생하지 않는다. 추후 인공지능을 활용하여 완전 자동으로 카메라를 조작하게 된다면 복합 구동에 대한 고려가 필요하다.
주목할만한 유사한 로봇으로 복강경 카메라 및 수술도구를 다관절 로봇으로 구현한 MiroSurge (DLR, Germany)이 있다[
13]. 투관침을 잡지 않고 원격중심운동을 하는 것은 본 연구와 유사하지만 수술 전 원격중심위치를 정의하기 위해 레이저 포인터와 카메라가 장착된 추가적인 로봇팔을 사용해야 하는 불편함이 있다[
14]. MiroSurge는 광학스캔을 통해 원격중심점 위치를 공간 상에 절대 위치로 정의하고 로봇 팔은 기구학 해석하여 원격중심운동을 구현하지만, 제안된 방식은 추가적인 장비 없이 로봇 팔의 플렌지와 원격중심점의 상대위치를 변경하며 원격중심운동을 구현하는 것이 큰 차별점이다.
4. 원격중심 위치 유지 성능 실험
제안된 원격중심운동 제어의 원격중심 위치 유지 성능을 검증하기 위해 새롭게 개발 중인 수술보조로봇을 사용하여 실험을 수행했다.
4.1 실험장치 구성 및 실험 방법
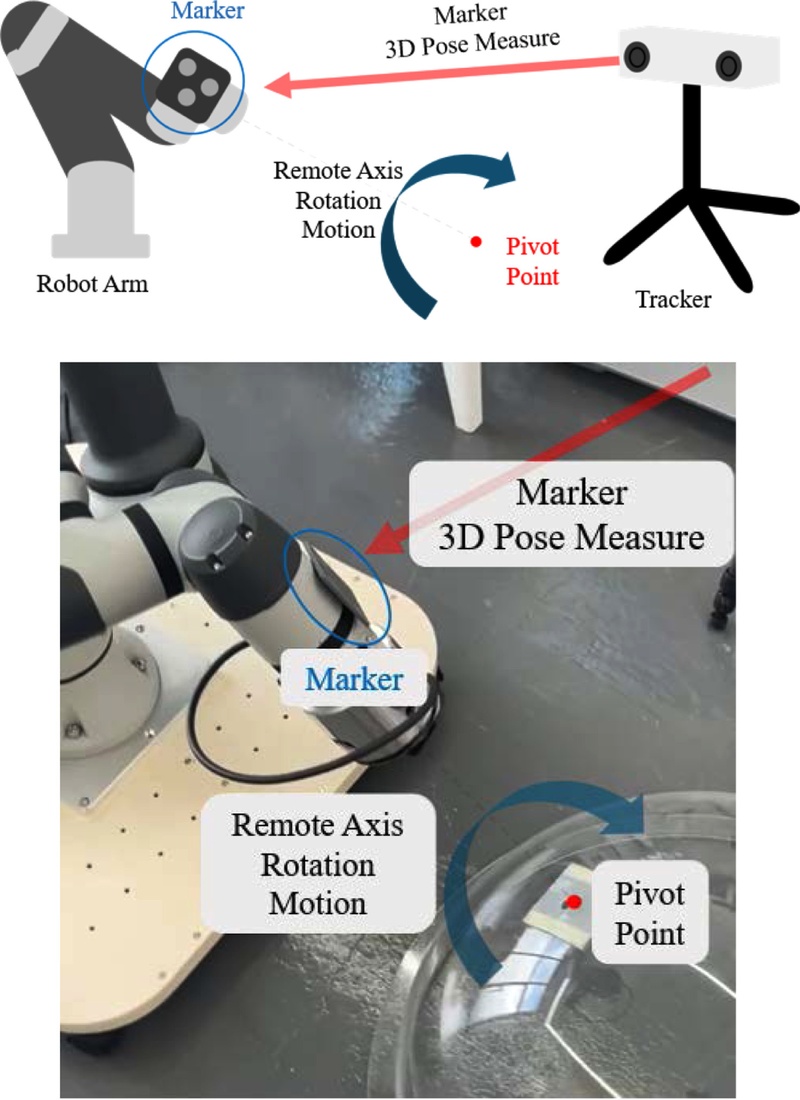
실험장치는
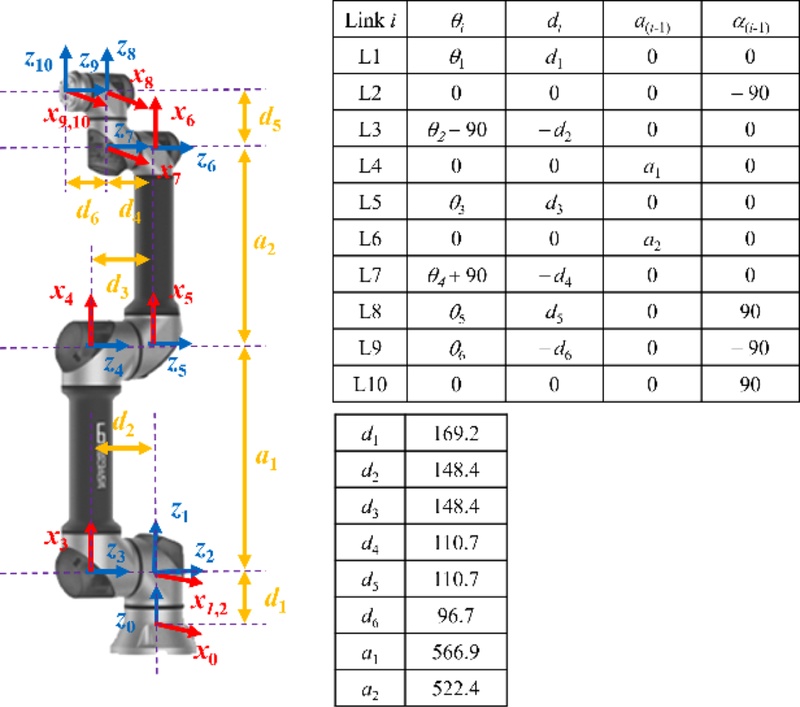
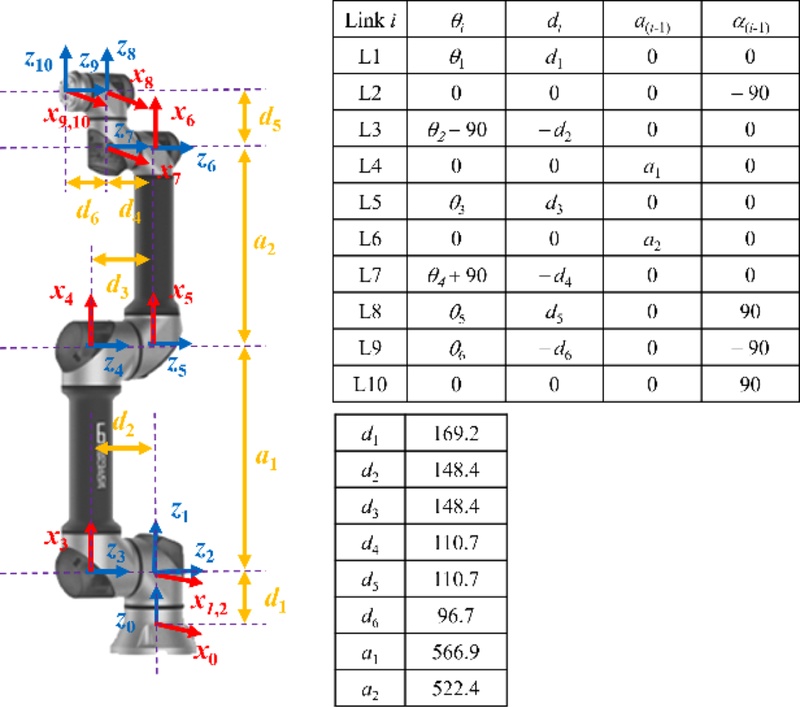
Fig. 6와 같이 구성된다. 복강을 모사하기 위해 투명 아크릴 반구에 큰 구멍을 뚫고 실리콘을 부착하여 실제 인체와 유사간 강성을 재현했다. 실험에 사용된 로봇은 RB-1200E (Rainbow Robotics Inc., Korea)을 기반으로 한 수술보조용 협동로봇이다. 사용된 로봇의 modified D-H parameters [
15]는
Fig. 7과 같다. 원격중심의 위치를 측정하기 위해 Optical Tracking System (SKADI, Digitrack Co., Ltd., Korea)을 사용하였다. 원격중심 설정 후 해당 위치를 pivot 모션을 통한 마커 캘리브레이션을 수행하였다. Pivot 캘리브레이션은 마커 기준으로 로봇의 회전 중심점을 정확히 추정하기 위해 수행되며, 마커의 위치를 측정한 후 변환 행렬을 통해 원격 중심의 병진 운동과 회전 운동에 대한 데이터를 계산하여 pivot 동작의 중심을 추정하는 방식으로 진행된다. 제안된 방식의 특성으로 줌 인/아웃 구동을 하면 로봇으로부터 원격중심까지의 거리가 변경되는데 각 거리마다의 원격중심운동 성능의 변화를 검토하기 위해 캘리브레이션을 새로 수행하여 기준점을 잡고 pivot 운동 중심의 위치를 측정한다. 이상적으로는 캘리브레이션 된 중심의 위치는 설정된 원격 중심을 기반으로 병진 운동의 변화 없이 회전 운동의 변화만 발생해야만 하므로 실제 병진 운동에 대한 데이터를 수집하여 오차를 확인한다.
Fig. 6Experimental apparatus and method
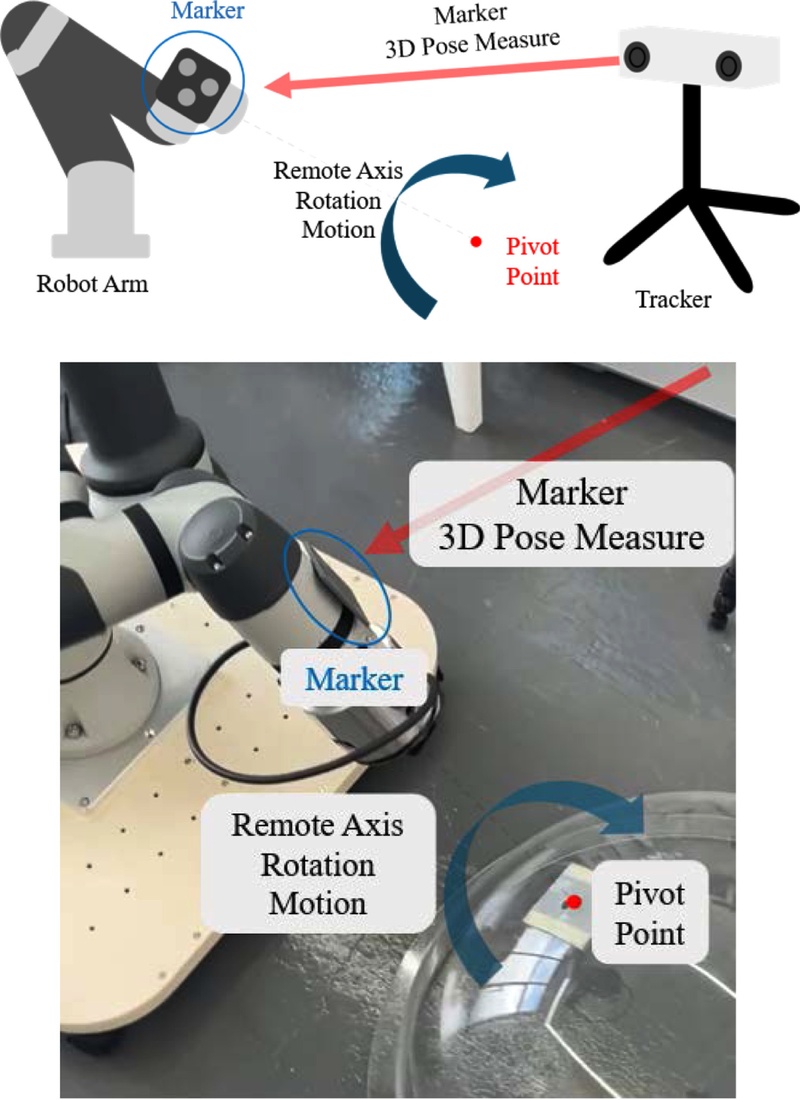
Fig. 7Modified D-H parameters of the robot
4.2 실험 결과 및 고찰
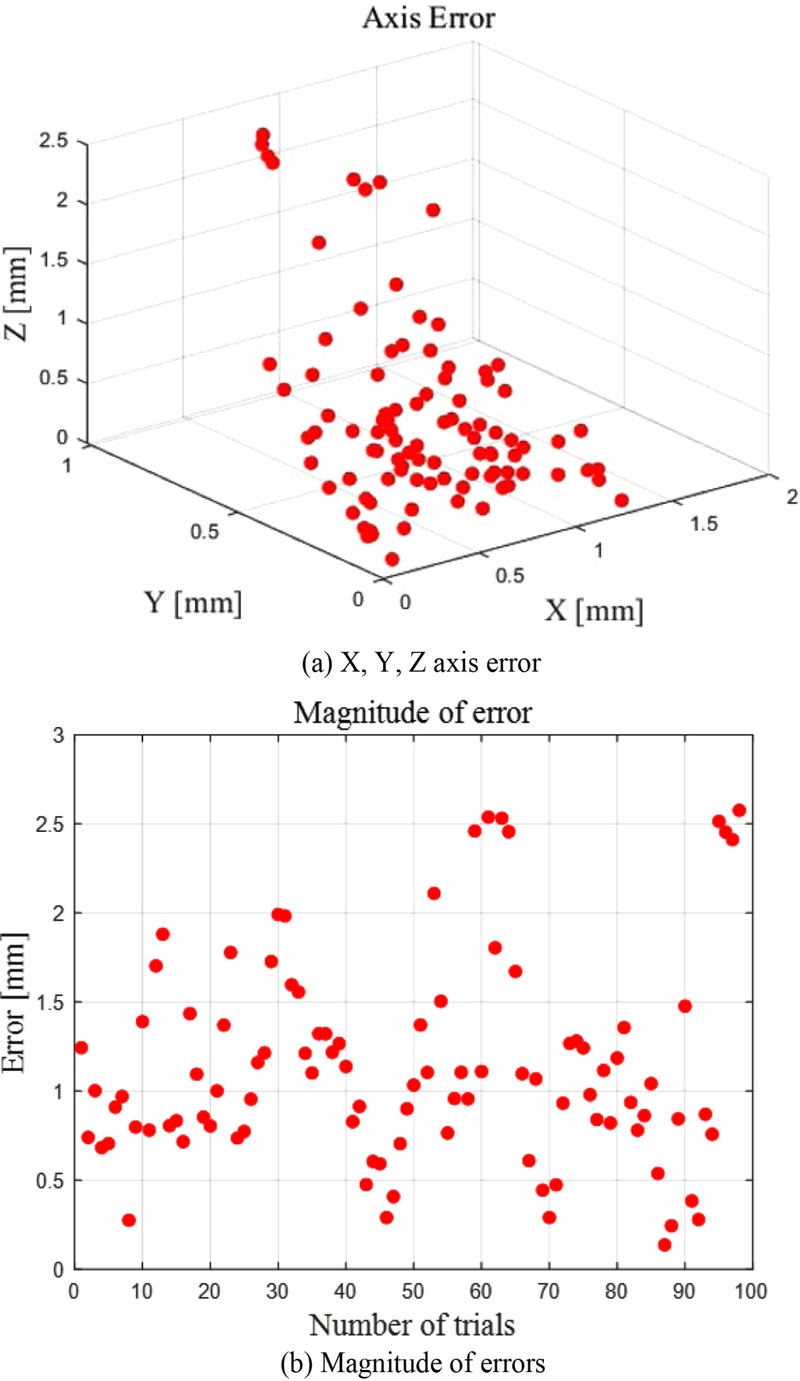
실험 결과는
Fig. 8(a)와 같다. 데이터는 총 98회 수집한 후 평균을 계산하였다. X 방향의 평균 오차는 0.672 mm, Y 방향의 평균 오차는 0.318 mm, Z 방향의 평균 오차는 0.704 mm를 나타냈다. 3차원 위치 오차의 크기는
Fig. 8(b)와 같이 도출되어 오차 평균은 1.136 mm이고 표준편차는 1.273 mm이다. 임상의가 제안한 2 mm의 허용 위치오차 내에 들어오는 것이 확인되고, 투관침을 잡지 않아도 기존의 수술보조로봇과 유사한 성능으로 원격중심운동이 가능함을 증명했다. 본 실험에서는 Z 방향 오차가 평균적으로 크고 최댓값도 가장 크게 발생하는데 이는 복강으로 들어가고 나가는 방향의 오차가 크다는 것을 의미한다. 이는 3.1절에서 설명한 원격중심점 정의 절차에서
Fig. 8(b) 단계에 해당하는 부분에서 오차의 원인을 제공하는 것으로 분석된다. 원격중심을 정의하기 위해 엔드이펙터1을 투관침의 윗면에 정확하게 밀착시켜야 한다. 직접교시로 로봇을 당겨오면서 투관침에 밀착하는 과정에서 밀착이 제대로 되지 않았거나, 로봇 쪽 조작이 상대적으로 무거우니 삽입된 투관침이 들어 올려져서 오프셋된 원격중심이 정의된 것으로 분석된다. 엔드이펙터 1에 투관침의 밀착여부는 투관침을 감싸는 요철 구조물에 의해 고정되는 상태를 바탕으로 판단되었다. 그러나 투관침 구멍을 활용할 수 있는 기둥 형태의 가이드 구조물 등을 통해 엔드이펙터1의 형상을 투관침과 밀착이 용이하도록 수정할 필요가 있고, 직접교시 감도도 최대한 부드럽게 조정하여 사용자가 쉽게 투관침에 로봇을 밀착할 수 있도록 해야 한다.
Fig. 8Experimental result
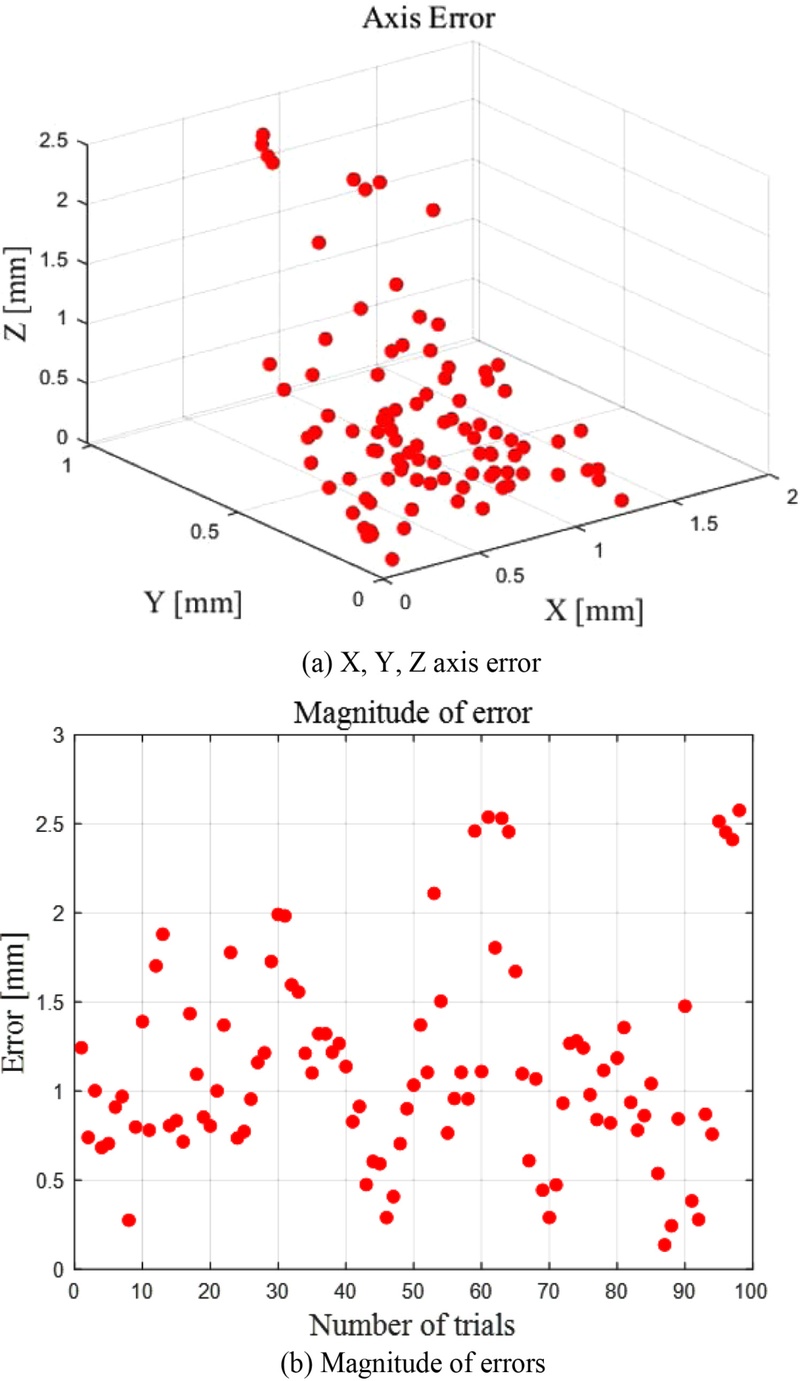
협동로봇의 실제 손목관절의 각도와 엔코더로 추정된 각도의 오차가 존재할 수 있다. 카메라가 줌 아웃으로 갈수록 로봇 플랜지와 원격중심점 사이의 거리가 멀어지면서 손목관절 각도의 오차로 인한 점고정 제어의 위치 오차도 증폭된다. 본 성능시험 결과에서 X, Y 방향 위치오차도 증가하는 경향을 보이지만 오차 최대값이 Z 방향과 달리 2 mm 이내에 분포하고 있어 본 실험에 사용된 로봇의 하드웨어 성능은 복강경 카메라 보조 작업에 사용 가능함을 확인할 수 있다.
5. 결론
본 연구는 6자유도 협동로봇을 활용한 수술보조로봇이 투관침을 고정하지 않고도 원격중심점 위치를 정의하고 원격중심운동을 제어하는 방법을 제안한다. 협동로봇에 내장된 점 고정 운동과 TCP 정의 기능을 조합한 제어 전략은 투관침을 잡지 않고도 내시경 카메라의 전후진 운동을 수행하며 4자유도 원격중심운동이 가능하다. 제안된 제어 전략으로 원격중심을 정의하고, 원격중심 운동을 하는 동안의 중심점 유지 성능을 실험으로 확인했다. X 방향에 대한 평균 오차는 0.672 mm, Y 방향의 평균 오차는 0.318 mm, Z 방향의 평균 오차는 0.704 mm이고 3차원 오차 크기의 평균은 1.136 mm로 수술보조 작업이 가능한 범위에서 원격중심운동이 가능함을 보였다.
본 연구에서 제안한 원격중심점 정의 및 원격중심운동 구현 방법은 새로운 기구학 모델이나 제어 알고리즘에 기반하고 있지 않지만, 범용 협동로봇에 내장된 기능의 조합만으로도 수술현장에서 필요한 기능을 구현할 수 있는 접근법을 제시한다. 현재 대부분의 로봇 수술 및 보조에서는 투관침을 잡는 기구적 제한이나 광학 마커 등 추가적인 장치들을 지닌 수술 전용 로봇이 작업을 수행하고 있으나, 범용 협동로봇도 앞으로 다양한 형태와 방법으로 의료 현장에 적용될 수 있는 잠재력이 있다. 본 연구팀에서 새로 개발되고 있는 복강경 카메라 조작을 위한 수술보조로봇에는 제안된 로봇 구성 및 제어 전략이 적용되어 수술대 위에서 의료진들과 간섭을 최소화하면서 효과적인 수술보조 작업이 가능할 것으로 기대된다.
ACKNOWLEDGMENTS
본 연구는 중소벤처기업부의 재원으로 산학연 콜라보 연구개발의 지원을 받아 수행되었음(No. RS-2023-00222971).
REFERENCES
- 1.
Johnson, A., (1997), Laparoscopic surgery, The Lancet, 349(9052), 631-635.
10.1016/S0140-6736(96)10032-5
- 2.
Lanfranco, A. R., Castellanos, A. E., Desai, J. P., Meyers, W. C., (2004), Robotic surgery: A current perspective, Annals of Surgery, 239(1), 14-21.
10.1097/01.sla.0000103020.19595.7d
- 3.
Aksungur, S., (2015), Remote center of motion (RCM) mechanisms for surgical operations, International Journal of Applied Mathematics Electronics and Computers, 3(2), 119-126.
10.18100/ijamec.84097
- 4.
Hadavand, M., Mirbagheri, A., Behzadipour, S., Farahmand, F., (2014), A novel remote center of motion mechanism for the force-reflective master robot of haptic tele-surgery systems, The International Journal of Medical Robotics and Computer Assisted Surgery, 10(2), 129-139.
10.1002/rcs.1515
- 5.
Glazunov, V., Laryushkin, P., Shalyukhin, K., (2023), Structure, kinematics, and prototyping of a parallel manipulator with a remote center of rotation, Journal of Machinery Manufacture and Reliability, 52(6), 585-591.
10.1134/S1052618823060080
- 6.
Aksungur, S., (2015), Remote center of motion (RCM) mechanisms for surgical operations, International Journal of Applied Mathematics Electronics and Computers, 3(2), 119-126.
10.18100/ijamec.84097
- 7.
Afshar, M., Carriere, J., Meyer, T., Sloboda, R., Husain, S., Usmani, N., Tavakoli, M., (2020), Optimal design of a novel spherical scissor linkage remote center of motion mechanism for medical robotics, Proceedings of the 2020 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 6459-6465.
10.1109/IROS45743.2020.9341365
- 8.
Kim, M., Zhang, Y., Jin, S., (2021), Control strategy for direct teaching of non-mechanical remote center motion of surgical assistant robot with force/torque sensor, Applied Sciences, 11(9), 4279.
10.3390/app11094279
- 9.
Kastritsi, T., Doulgeri, Z., (2022), A passive admittance controller to enforce remote center of motion and tool spatial constraints with application in hands-on surgical procedures, Robotics and Autonomous Systems, 152, 104073.
10.1016/j.robot.2022.104073
- 10.
Sadeghian, H., Zokaei, F., Hadian Jazi, S., (2019), Constrained kinematic control in minimally invasive robotic surgery subject to remote center of motion constraint, Journal of Intelligent & Robotic Systems, 95, 901-913.
10.1007/s10846-018-0927-0
- 11.
Su, H., Qi, W., Chen, J., Zhang, D., (2022), Fuzzy approximation-based task-space control of robot manipulators with remote center of motion constraint, IEEE Transactions on Fuzzy Systems, 30(6), 1564-1573.
10.1109/TFUZZ.2022.3157075
- 12.
Song, S. H., Kim, M., Jin, S., Park, J. S., Choi, G.-S., Zhang, Y., Lee, G., Jeong, M. H., (2025), Preclinical evaluation of a surgical assistant robot for use in minimally invasive abdominal surgeries, Biomedical Engineering Letters, 15(1), 229-237.
10.1007/s13534-024-00441-9
- 13.
Hagn, U., Konietschke, R., Tobergte, A., Nickl, M., Jörg, S., Kübler, B., Passig, G., Gröger, M., Fröhlich, F., Seibold, U., (2010), DLR mirosurge: A versatile system for research in endoscopic telesurgery, International Journal of Computer Assisted Radiology and Surgery, 5, 183-193.
10.1007/s11548-009-0372-4
- 14.
Konietschke, R., Bodenmüller, T., Rink, C., Schwier, A., Bäuml, B., Hirzinger, G., (2011), Optimal setup of the DLR mirosurge telerobotic system for minimally invasive surgery, Proceedings of the 2011 IEEE International Conference on Robotics and Automation, 3435-3436.
10.1109/ICRA.2011.5979616
- 15.
Craig, J., (1986), Introduction to robotics: Mechanics & control, Addison Wesley.
Biography
- TaeHoon Kim
Master’s course Student, School of Mechanical Engineering, Pusan National University, Busan, Korea. His research interests are robot design and control.
- Minhyo Kim
Ph.D. course Student, School of Mechanical Engineering, Pusan National University, Busan, Korea. His research interests are robot design and control.
- Youqiang Zhang
Ph.D. course Student, School of Mechanical Engineering, Pusan National University, Busan, Korea. His research interest is artificial intelligence.
- Hyunseok Choi
CEO, Digitrack, Daegu, Korea. He received his Ph.D in Robot Engineering from DGIST. His research interests are robot design and control.
- Hyoen Kim
Research engineer, Digitrack, Daegu, Korea. He received his Ph.D in Robot Engineering from DGIST. His research interests are robot design and control.
- JunSeok Park
Professor, School of medicine, Kyungpook National University, Daegu, Korea. He received his Ph.D in Surgery from Chung Ang University.
- Sangrok Jin
Associate Rofessor, School of Mechanical Engineering, Pusan National University, Busan, Korea. He received his Ph.D in Mechanical Engineering from Seoul National University. His research interests are medical robot design and control.