ABSTRACT
ERCP (Endoscopic Retrograde Cholangiopancreatography) is a common procedure used to diagnose and treat biliary and pancreatic diseases. However, the repeated exposure to X-ray radiation during these procedures poses health risks to surgeons. Teleoperation systems can help reduce this exposure, but they face challenges such as the lack of force feedback and differences between the master device's mechanisms and the movements of surgical tools, which can diminish surgical precision. This study aimed to develop a master device with force feedback specifically for teleoperated ERCP guidewire insertion, drawing inspiration from the natural hand movements of surgeons. The device includes a ring-shaped translation control handle and a rotation control handle, both designed to allow unlimited movement, thereby intuitively replicating the operation of the guidewire. A force feedback system was incorporated to enable collision detection and prevent potential injuries during procedures. Experimental results showed that the proposed system enhances control precision, reduces handling inertia, and provides effective force feedback. These advancements ensure safer and more accurate guidewire manipulation, addressing key limitations of existing teleoperation systems. Ultimately, this device not only minimizes radiation exposure for surgeons but also facilitates intuitive and precise teleoperated ERCP procedures.
-
KEYWORDS: Teleoperation, ERCP, Guidewire, Master device, Surgical robot
-
KEYWORDS: 원격 제어, 내시경역행담췌관조영술, 가이드 와이어, 마스터 디바이스, 수술 로봇
1. 서론
ERCP(내시경역행담췌관조영술) 시술은 짧은 회복 시간과 적은 수술 상처로 인해 시장 규모와 시술 건수가 증가하고 있다
[1,
2]. ERCP 시술 동안, 외과의는 내시경을 손으로 잡고 측시경과 방사선 사진에 의존하면서 수술을 진행한다. 이로 인해 외과의는 불가피하게 수술 중 방사선에 반복적으로 노출될 수밖에 없으며, 이는 외과의의 건강 악화를 초래한다. 이를 방지하기 위해 외과의는 납 방호복을 착용하지만, 방호복의 무게로 인해 피로가 유발되며, 방호복이 몸통만 보호하기 때문에 머리와 손은 여전히 방사선에 노출된다.
이 문제를 해결하기 위해 원격 수술에 대한 연구가 진행되고 있다. 원격 수술은 마스터 디바이스(Master Device)와 슬레이브 디바이스(Slave Device)로 구성된다. 마스터 디바이스는 외과의가 수술을 조작하는 컨트롤러이고, 슬레이브 디바이스는 수술에 사용되는 가이드와이어나 도구를 제어하는 장치이다. 원격 수술의 장점은 마스터 디바이스와 슬레이브 디바이스의 활용으로 인해 외과의가 반복적인 방사선 노출에서 보호받을 수 있다는 것이다. 이는 외과의의 건강 악화를 방지할 수 있는 이점을 제공한다.
원격 수술의 단점 중 하나는 마스터 디바이스의 메커니즘과 실제 가이드와이어의 움직임이 다르다는 점이다. 마스터 디바이스 핸들의 움직임은 외과의가 일반적인 수술 경험에서 사용하는 도구의 움직임과 유사해야 하며, 이를 통해 조작의 정밀성을 높이고 새로운 시스템에 대한 적응을 도울 수 있다.
또 다른 단점은 원격 수술에서는 외과의가 손을 통해 힘을 느끼는 것이 불가능하다는 점이다. ERCP 시술과 달리 원격 수술은 외과의와 수술 도구(예: 가이드와이어와 카테터) 사이의 물리적 접촉이 단절된다. 이는 평소 느낄 수 있는 힘 피드백을 사용할 수 없게 되어, 수술 도구를 전진시키는 과정에서 충돌을 인지하지 못해 예상치 못한 부상을 초래할 수 있다.
이러한 단점을 해결하기 위해 실제 가이드와이어 움직임과 유사한 메커니즘과 힘 피드백 기능을 갖춘 직관적인 설계의 마스터 디바이스가 필요하다. 직관적인 설계는 외과의가 수술 경험을 그대로 활용할 수 있도록 하며, 새로운 메커니즘에 적응할 필요 없이 정밀한 조작을 가능하게 한다. 또한, 힘 피드백 기능은 외과의가 더욱 정밀하고 안전한 수술을 수행할 수 있도록 돕는다.
수술 도구의 움직임과 유사한 마스터 디바이스를 설계하기 위한 다양한 연구가 진행되어 왔다. Yu는 레일을 따라 실린더 형태의 핸들을 배치하는 방법을 제안하였다
[3]. 이 방식에서는 핸들과 함께 움직이는 동기 벨트를 통해 핸들의 위치를 측정하고, 회전각은 별도의 센서를 통해 측정하였다. Li 또한 유사하게 레일을 따라 실린더 핸들을 이동시키는 방법을 제안하였다
[4]. 이들 연구에서는 원격 수술에 사용되는 도구의 움직임을 모사할 수 있도록 마스터 장치를 설계하였다. 특히, 슬레이브 장치의 연속적인 전진 운동을 위해, 특정 힘이 핸들에 가해졌을 때만 슬레이브 장치가 작동하도록 기능을 추가하였다. 이를 통해 외과의사는 핸들을 쥐고 슬레이브 로봇을 조작한 뒤, 슬레이브 장치에 영향을 주지 않고 핸들을 원래 위치로 되돌려 놓을 수 있게 되어, 결과적으로 슬레이브 로봇에 전진 동작을 수행할 수 있다.
그러나 레일을 따라 실린더를 이동시키는 이 방법은 매 전진 동작마다 외과의사가 이동할 수 있는 거리가 제한된다는 단점이 있다. 또한 슬레이브 장치를 전진시키기 위해 요구되는 특정 힘은 외과 수술 시 필요한 정밀 조작에 장애가 될 수 있다. 이는 외과의사가 수술 시 보통 핸들을 가볍게 쥐고 조작하는 것과 달리, 마스터 장치가 작동하기 위해서는 일정 수준 이상의 힘을 가해야 하기 때문이다.
Guo는 가이드와이어 형상의 손잡이를 앞뒤로 이동시키는 방법을 제안하였다
[5]. 또한 Sankaran은 가이드와이어 형상의 손잡이를 축 방향으로 움직여 수평 이동 동작을 제어하고, 가이드 와이어 근처의 별도 핸들을 회전시켜 제어를 추가해 2자유도를 측정할 수 있는 마스터 디바이스를 고안하였다
[6]. Guo의 방식과 유사하게 Chen 역시 가이드와이어 자체를 핸들로 사용하면서, 다른 손으로 회전 핸들을 조작하도록 설계된 마스터 장치를 제안하였다
[7]. Bao는 가이드와이어를 핸들로 사용하되 별도의 회전 핸들을 두지 않고, 가이드와이어의 회전을 측정해 2자유도 정보를 얻는 마스터 장치를 설계하였다
[8].
조이스틱을 이용한 원격 조종 장치도 연구되고 있다. Xie는 햅틱 피드백 기능이 있는 조이스틱으로 의료용 로봇을 위한 원격 조종 장치를 만들었다
[9]. Song은 혈관중재술 연구를 위해 조이스틱 방식의 마스터 디바이스를 사용했다
[10]. 하지만 조이스틱 방식은 원통 모양의 손잡이를 기울면서 수술 도구를 조작하기 때문에 손으로 직접 수술하는 방식과는 거리가 멀다는 단점이 있다.
한편, 가이드와이어를 손잡이로 사용하는 방법은 힘 피드백을 구현하는 데 어려움이 있다. 가이드와이어가 유연한 재질로 제작될 경우, 힘을 가하면 휘어지기 쉬워 정확한 힘 피드백 구현이 어렵기 때문이다.
마스터 장치를 사용하는 운영자에게 힘 피드백을 제공하기 위한 연구도 다수 진행되어 왔다. 예를 들어 Bao는 Geomagic Touch 컨트롤러를 활용하여 원격 조종에 관한 연구를 수행하였다
[11]. Xiang은 Novint Falcon 컨트롤러를 활용하여 혈관 내 수술용 원격조작 연구를 진행하였다
[12]. 이와 같이 Bao와 Xiang은 시중에 판매되는 컨트롤러를 적용하여 원격조작 시스템을 개발하였다.
그러나 이들 컨트롤러는 최대 6자유도의 움직임과 측정을 목표로 설계되어 있어, 실제 가이드와이어나 수술 도구가 요구하는 DOF 이상으로 여분의 자유도가 발생한다. 이는 조작 정확도를 저하시킬 위험이 있다. 이에 Wang은 시중에서 판매되는 컨트롤러의 불필요한 자유도를 선형 레일로 제약하여, 수평 이동과 회전의 2자유도만 남기도록 하는 연구를 진행하였다
[13]. 그러나 이 방식 역시 컨트롤러가 이동할 수 있는 공간이 제한적이어서, 수술 도구의 수평 이동이 원활하지 않은 어려움이 있었다.
또한 Yin은 MR Fluids를 이용하여 마스터 장치에서 힘 피드백을 구현하는 연구를 제안하였다
[14]. 그러나 이 방식은 충돌이 발생했을 때, 핸들을 원위치로 복구하는 것이 어렵다는 단점이 존재한다.
본 연구에서는 원격 제어 ERCP 가이드와이어 삽입을 위한 힘 피드백이 가능한 마스터 디바이스의 새로운 설계를 제안한다. 기존 위치제어 마스터 디바이스의 단점인 제한된 조작 범위를 회전하는 고리 및 원통 설계로 한계가 없는 동작을 구현했다. 또한 2개의 손잡이를 기존의 수술 경험을 그대로 적용할 수 있도록 배치하여, 새로운 장치에 대한 적응이 쉽다. 원격 조종 시 안전한 수술을 도와주기 위해 힘 피드백 기능으로 수술 도구가 큰 힘으로 부딪치지 않도록 도와준다. 그리고 새로운 디자인의 마스터 디바이스 성능을 확인하기 위해 위치 제어 및 힘 피드백 성능 검증 실험, 다른 컨트롤러와 비교 실험, 모의 ERCP 실험을 진행하였다.
2. 마스터 디바이스 설계
2.1 ERCP 시술에서의 가이드와이어
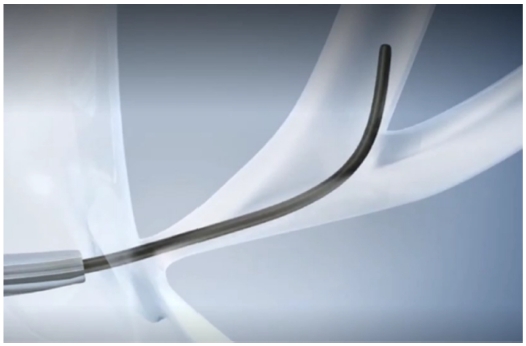
가이드와이어는 ERCP 시술에서 핵심적인 구성 요소로 사용되며, 길이는 260에서 480 cm, 두께는 0.045에서 0.097 cm 사이이다. 유연성과 굽어진 팁을 갖춘 가이드와이어는 원하는 방향으로 갈 수 있도록 한다.
Fig. 1에서 보이는 바와 같이 가이드와이어를 조작해 목표 부위에 도달한다.
Fig. 1Guidewire usage for finding path to target
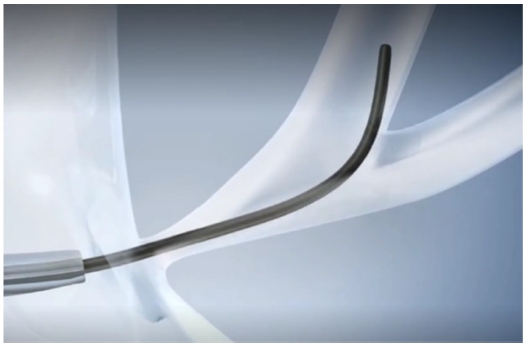
가이드와이어의 움직임은 수평 이동(Translation)과 회전(Rotation)으로 이루어지며, 이는 외과의의 손을 통해 조작된다. 수평 이동은 가이드와이어를 목표 영역으로 삽입하기 위한 움직임이고, 회전은 굽어진 팁을 목표 경로로 돌리는 작업이다.
가이드와이어는 돌 제거 바구니 및 돌 제거 풍선과 같은 도구 삽입에 중요한 역할을 한다
[1]. 따라서 가이드와이어가 경로를 찾는 데 실패하면 ERCP 절차를 진행할 수 없기 때문에 가이드와이어를 정확히 제어하는 것이 중요하다.
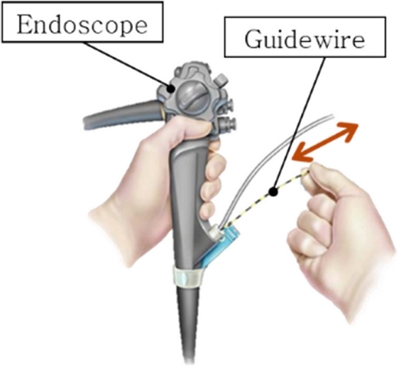
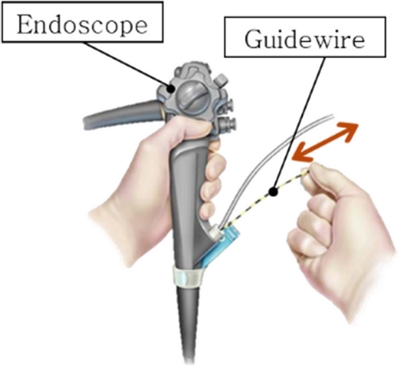
외과의는 한 손으로 내시경을 잡고 다른 손으로 가이드와이어 삽입 포트를 통해 가이드와이어를 밀어 넣는다. 이 과정에서 엄지와 검지를 사용해 가이드와이어를 잡고 조작한다.
가이드와이어를 잡은 후, 손은 삽입 방향으로 이동하며 가이드와이어를 수평 이동시킨다. 손가락이 삽입 포트에 도달하면 손은 위로 이동하여 가이드와이어의 상단 부분을 다시 잡는다.
Fig. 2는 이 과정을 보여주며, 이 과정을 반복해 가이드와이어를 목표 위치로 밀어 넣는다.
Fig. 2Guidewire translation with the surgeon’s hand
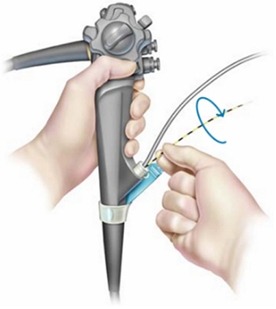
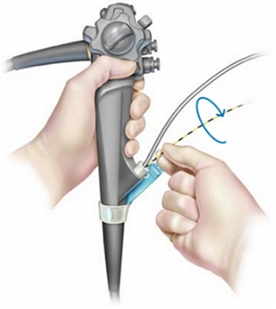
회전을 위해, 외과의는 가이드와이어를 엄지와 검지로 비틀어 목표 각도로 돌린다.
Fig. 3은 이 과정에서 손가락이 가이드 와이어를 비틀어 목표 경로로 향하게 하는 방법을 보여준다.
Fig. 3Guidewire rotation with the surgeon’s fingers
2.3 수평 이동 및 회전 제어 핸들
가이드와이어 제어에 필요한 자유도는 수평 이동과 회전이다. 실제 수술과 유사한 정밀한 제어를 위해 핸들이 회전한 만큼 슬레이브 디바이스가 작동하도록 설계되었다. 또한, 수술 중 불편함을 최소화하기 위해 핸들이 제한 없이 작동할 수 있어야 한다.
이를 충족시키기 위해 수평 이동 제어 핸들은 링 형태로 설계되었다. 외경은 177 mm, 내경은 157 mm로 손이 충분히 들어갈 수 있을 만큼 크며, 두께는 10 mm로 손으로 쉽게 잡을 수 있도록 설계되었다.
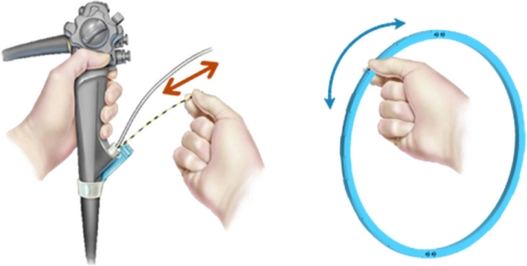
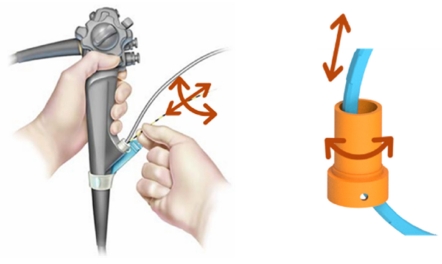
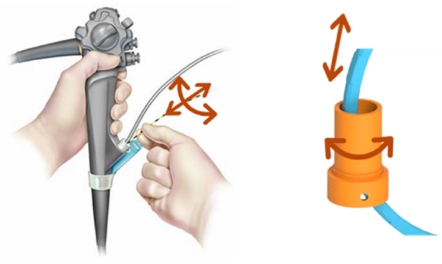
Fig. 4는 가이드와이어 삽입 동작과 수평 이동 제어 핸들 조작의 유사성을 보여준다.
Fig. 4Comparison of guidewire insertion and translation control handle
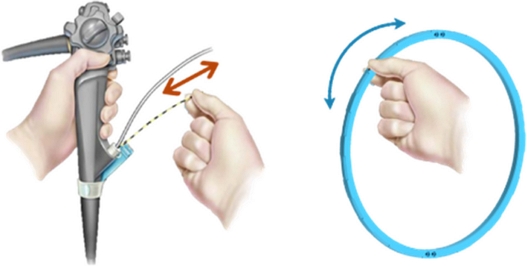
핸들의 원형 설계는 무제한 회전을 가능하게 하며, 핸들을 반복적으로 움직이며 동시에 기능을 켜고 끄는 번거로움을 제거한다. 회전 제어 핸들은 실린더 형태로 설계되었으며, 외과의가 가이드와이어를 회전시키는 방식과 유사하게 설계되었다.
Fig. 5는 가이드와이어 회전 동작과 핸들 조작의 유사성을 보여준다.
Fig. 5Comparison of guidewire rotation and translation control handle

가이드와이어의 수평 이동과 회전은 동일한 축을 공유한다. 가이드와이어 조작의 직관적인 설계를 구현하기 위해 수평 이동 제어 핸들의 접선은 회전 제어 핸들의 중심축과 배치되었다. 이러한 설계는 외과의가 기존 경험을 활용할 수 있도록 도와준다.
Fig. 6은 두 핸들의 위치와 움직임이 가이드와이어 조작과 유사함을 보여준다.
Fig. 6Comparison of manipulating the guidewire and control mechanism of the translation and rotation control handles
두 핸들은 서로 움직임에 방해가 되지 않도록 배치되었으며, 원격 수술 마스터 디바이스로서 최적의 경험을 제공한다.
2.4 마스터 디바이스 세부 설계
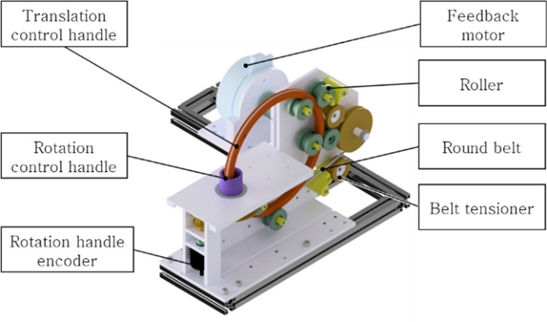
마스터 디바이스의 구성 요소 배치는
Fig. 7에 나타나 있다. 수평 이동 제어 핸들의 회전은 피드백 모터를 통해 측정된다. 또한, 피드백 모터를 통해 힘 피드백이 제공된다. 모터와 핸들의 움직임은 원형 벨트, 벨트 풀리, 샤프트, 타이밍 벨트 및 타이밍 풀리를 통해 연결된다. 6개의 롤러가 수평 이동 제어 핸들을 지지하며, 롤러의 위치는 사용자 손의 움직임을 방해하지 않도록 설계되었다.
Fig. 7Isometric view of the master device
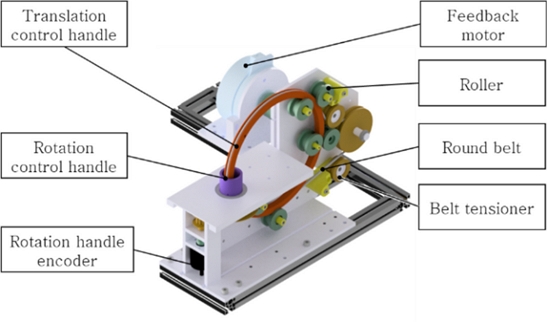
회전 제어 핸들은 수평 이동 제어 핸들 위에 겹쳐져 있다. 회전 제어 핸들의 회전은 엔코더를 통해 측정된다.
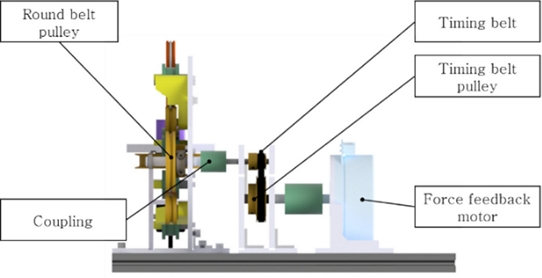
Fig. 8은 디바이스의 측면도를 보여준다.
Fig. 8Side view of the master device
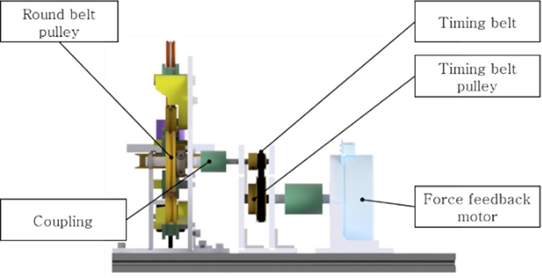
회전 관성은 빠르게 방향이 바뀌는 상황에서는 큰 방해요소가 된다. 모터의 회전 관성으로 인한 방해를 줄이기 위해 1 : 2.67 비율의 기어비를 가진 타이밍 풀리 2개로 모터와 수평 이동 제어 핸들이 연결된다. 이러한 연결은 더 정확한 힘 피드백을 구현하기 위함이다.
그래서 회전 관성의 영향을 줄이는 것이 중요하다. 이를 위해 기어비를 통해 회전 관성을 줄이는 과정은 다음과 같다.
먼저 손잡이부와 모터쪽 회전부의 회전 속도는 기어비(
r)에 비례하므로
식(1)과 같이 쓸 수 있다.
여기서
wmotor은 모터쪽 회전부의 회전 속도,
whandle은 손잡이의 회전 속도,
r은 기어비다. 그리고 손잡이 회전부를 돌리는데 필요한 운동 에너지 (
K) 를 구할 수 있는데
식(2)와 같다.
여기서 K는 회전에 필요한 운동 에너지, Ihandle은 손잡이로 전달되는 회전 관성이다.
모터쪽 회전부에도 동일한 운동 에너지 (
K) 가 필요하므로
식(3)과 같이 쓸 수 있다.
양변을 정리하면
식(5)와 같이 쓸 수 있다.
회전 관성은 기어비의 제곱에 비례한다는 점을 확인할 수 있다. 그러므로 기어비를 낮춰 손잡이에서 측정되는 모터의 회전 관성을 줄인 결과, 회전 관성을 3304.62에서 546.18 kgmm
2으로 줄일 수 있었다. 구성 부품들의 각 회전 관성은
Table 1에서 확인이 가능하다.
Table 1Inertia of each component
Table 1
|
Inertia
[kgmm2] |
Gear ratio |
Inertia measured
from handle
[kgmm2] |
|
Motor |
506 |
1:1 |
506 |
|
Motor side shaft |
0.44 |
1:1 |
0.44 |
Timing pulley
(18 mm) |
33.76 |
1:1 |
33.76 |
Timing pulley
(48 mm) |
1.0 |
1:2.67 |
0.15 |
|
Pulley shaft |
0.54 |
1:2.67 |
0.08 |
|
Belt pulley |
37.54 |
1:2.67 |
5.75 |
3. 마스터 디바이스 제어 시스템
3.1 마찰 보상
마찰과 관성은 정확한 힘 전달을 방해하는 주요 요인으로 작용한다. 따라서, 수평 이동 제어 핸들에 정확한 힘을 전달하기 위해 이를 보상하는 방법이 필요하다. 시스템 움직임을 방해하는 마찰은 운동 마찰과 점성 마찰(Viscous Friction)으로 분석될 수 있다. 점성 마찰은 회전 속도에 비례해 베어링·롤러의 윤활층-재료 변형 등에서 발생하는 내부 감쇠 저항 토크다. 운동 마찰과 점성 마찰에 의한 토크와 속도의 관계식은
식(6)과 같다.
여기서 α와 β는 각각 점성 마찰 계수, 운동 마찰 계수이다. 마스터 디바이스에서 속도에 따른 토크를 측정한 결과, α는 81.28 mNm, β는 0.87 mNm∙s/rad으로 얻을 수 있다.
3.2 힘 피드백
힘 피드백은 수평 이동 제어 핸들에 적용되는 토크를 기반으로 한다. 핸들의 외경이 177 mm, 내경이 157 mm인 경우, 핸들의 중심 지름 167 mm를 사용하여 토크를 계산한다.
ERCP 도구가 체내에서 충돌할 경우 심각한 손상이 발생할 수 있으므로, 사용자에게 경고하는 것이 필수적이다. 시스템은 슬레이브 디바이스에서 수술 도구에서 측정되는 힘을 연속적으로 측정하는데, 외부 환경에 수술 도구가 부딪치면 거리에 따라 측정되는 힘이 급증한다. 측정된 힘이 급증된 순간부터 200 mN가 측정되는 순간 천공 혹은 부상을 방지하기 위해 사용자에게 추가적인 200 mN의 피드백을 줘 사용자에게 경고한다. 이 기능은 충돌 직후의 심각한 손상을 최소화하도록 돕는다.
3.3 마스터 디바이스의 제어 흐름도
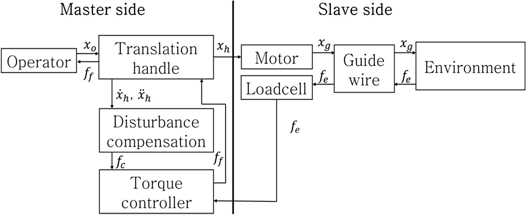
마스터 디바이스 전체 제어 시스템은
Fig. 9와 같다.
xo는 사용자가 핸들을 움직인 거리를 의미한다.
ff는 마스터 디바이스가 사용자에게 전달하는 피드백 힘이다.
xh,
x˙h,
x¨h는 마스터 디바이스의 수평 이동 핸들 위치, 속도, 가속도를 의미한다.
fc는 방해 요소들의 상쇄를 위한 수치다.
xg는 가이드 와이어의 위치를 의미한다.
fe는 슬레이브 디바이스에서 측정된 힘이다.
Fig. 9Block diagram of the teleoperation system
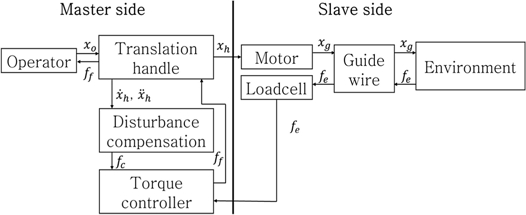
사용자는 먼저 수평 이동 제어 핸들을 잡는다. 핸들의 위치는 핸들에 연결되어 회전하는 모터의 엔코더로 측정된다. 핸들의 속도와 가속도는 모터 드라이버의 데이터를 기반으로 측정되며, 이는 정확한 피드백 힘을 제공하기 위해 방해 요소를 보상하는데 사용된다.
슬레이브 디바이스가 환경과 접촉할 때 측정된 상호 작용 힘은 슬레이브 디바이스에서 제공된다. 토크 컨트롤러는 피드백 힘에 필요한 힘을 계산하여 수평 이동 제어 핸들에 적용한다. 이는 사용자가 보다 정밀하고 안전하게 수술을 수행할 수 있도록 지원한다.
4. 실험 결과
본 연구에서는 설계된 마스터 디바이스의 성능을 검증하기 위해 4가지 실험을 진행했다. 첫번째 실험으로 마스터 디바이스의 위치 제어 성능을 평가했다. 두번째 실험으로 마스터 디바이스를 각각 선형 컨트롤러, 조이스틱 컨트롤러와 비교하여 검증했다. 세번째 실험으로 피드백 성능을 검증했다. 마지막으로 모의 ERCP 환경에서 피드백 여부에 따른 결과를 분석하였다.
4.1 마스터 디바이스의 위치 제어
마스터 디바이스의 위치 제어 핸들 성능을 평가하기 위한 비교 실험이 수행되었다. 마스터 디바이스의 위치는 피드백 모터의 엔코더를 사용해 측정되었으며, 위치 제어 성능 평가를 위해
Fig. 10에서 보이는 것처럼 마스터 디바이스를 제작하였다. 그리고
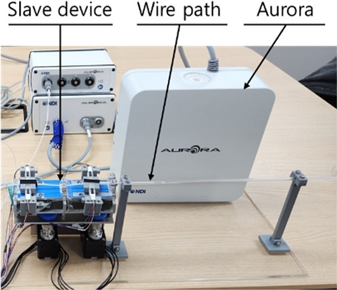
Fig. 11에서 보이는 바와 같이 가이드와이어의 위치는 Aurora 센서를 통해 측정되었다. Aurora는 측정 와이어의 6자유도를 실시간으로 측정할 수 있는 장치이다.
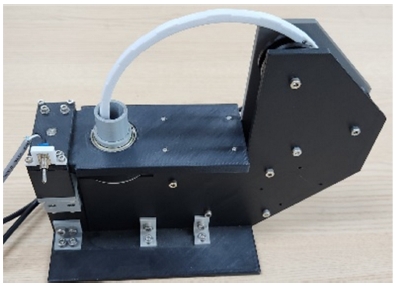
Fig. 10Master device used for wire control
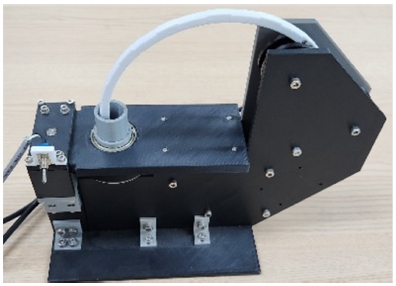
Fig. 11Experiment setting for measurement of wire’s position controlled by master device, controller
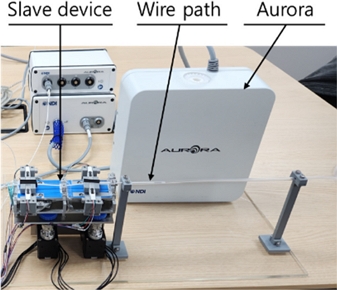
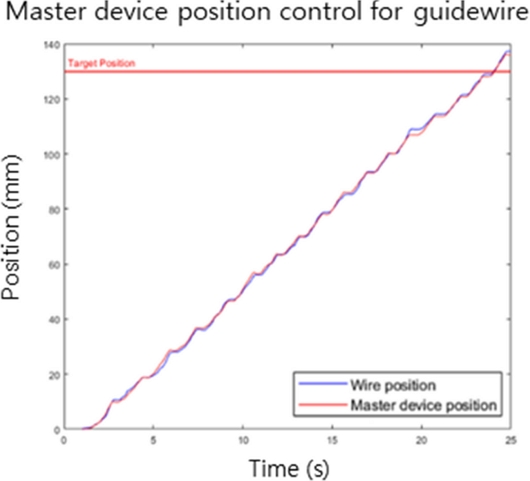
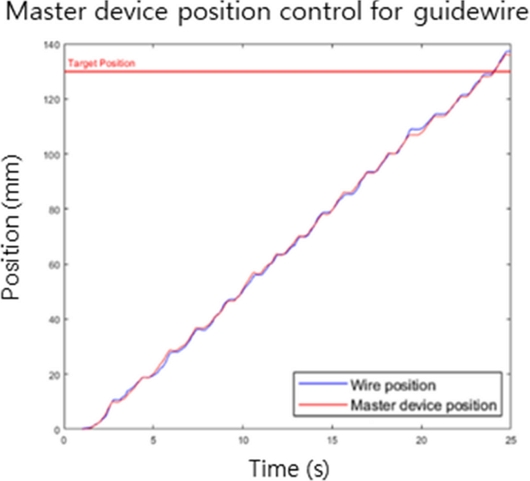
Fig. 12에서 볼 수 있듯, 가이드와이어 위치와 핸들 위치는 전구간에서 거의 일치하였다. 목표 삽입 거리 130 mm 대비 평균 제곱 오차(MSE)가 0.59 mm로 0.45%에 불과해, 임상적으로 허용 가능한 오차 한계 1 mm 이하를 충족하였다. 제안된 마스터 디바이스로 수술 도구를 제어하면 정밀한 원격 조종 수술이 가능하다는 점을 확인할 수 있다.
Fig. 12Position comparison of master device and slave device
4.2 다른 컨트롤러와 비교 실험
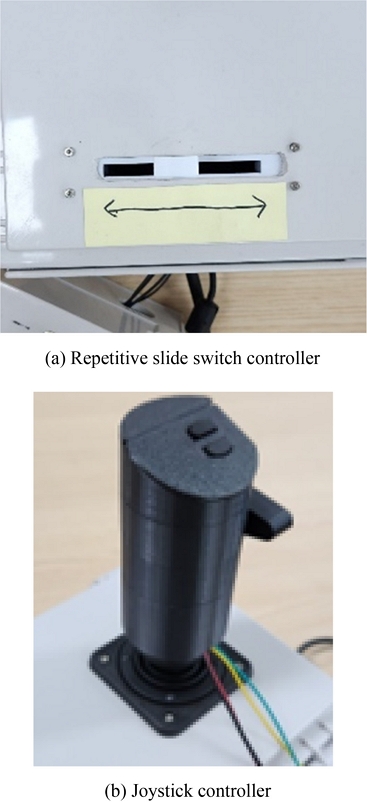
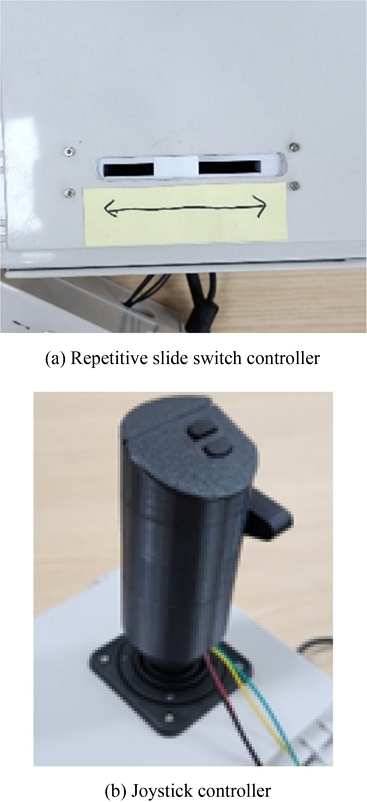
Fig. 13Controllers compared with master device
4.2.1 선형 컨트롤러와 비교 실험
무제한으로 작동 가능한 수평 이동 핸들의 효과를 평가하기 위해 비교 실험이 수행되었다. 비교 대상으로 같은 방식으로 위치 제어를 하는 선형 컨트롤러(
Fig. 13(a))를 사용했으며, 선형 컨트롤러 핸들은 제한적인 동작 범위에서 반복적으로 움직이며 가이드와이어를 이동시켰다.
두 가지 컨트롤러를 비교하는 과정에서 동작에 필요한 시간을 비교할 수 있었다. 선형 컨트롤러는 손잡이가 이동하는 동작 범위에 제한이 있었지만, 원형 설계를 적용한 마스터 디바이스는 이러한 제한 없이 가이드와이어를 이동시킬 수 있었다.
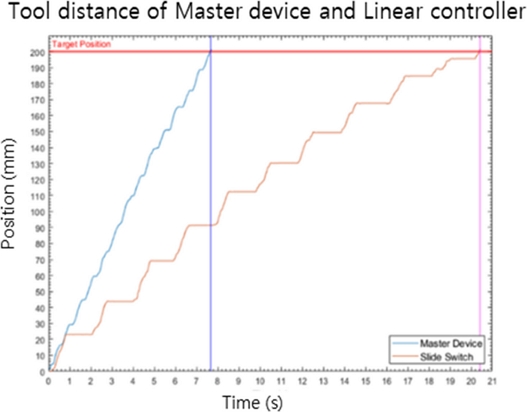
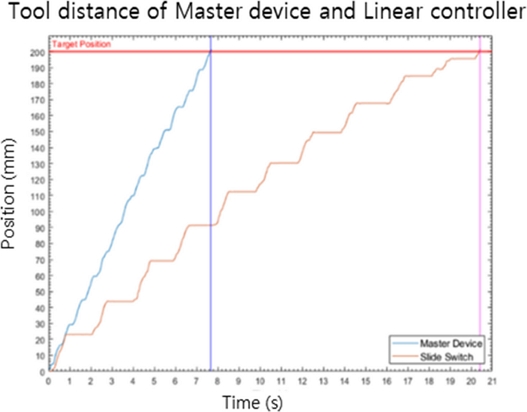
Fig. 14는 두 시스템의 위치 제어 성능을 시간에 따라 비교한 결과를 보여준다. 원형 핸들을 사용한 마스터 디바이스는 7.6초 내에 200 mm를 이동시켰으며, 선형 컨트롤러는 같은 거리를 이동하는 데 20.4초가 소요되었다. 마스터 디바이스가 선형 컨트롤러보다 짧은 시간 내에 목표 지점까지 도착했다는 점을 확인할 수 있고, 이는 사용자가 더 빠르게 원하는 동작을 수행할 수 있음을 나타낸다.
Fig. 14Position comparison by time of master device and linear controller
4.2.2 조이스틱 컨트롤러와의 비교
마스터 디바이스와 조이스틱 컨트롤러(
Fig. 13(b))의 제어 성능을 비교하기 위한 실험이 진행되었다. 조이스틱 컨트롤러와 비교한 이유는 조이스틱 컨트롤러는 원격조종 시스템에 많이 사용되는 방식이고, 슬레이브 디바이스의 속도 제어를 위해 손잡이의 기울기에 따라 유동적인 제어가 가능하기 때문이다. 조작 방식으로는 조이스틱 컨트롤러는 기울기 각도에 따라 슬레이브 디바이스의 이동 속도를 제어하며, 작은 각도로 기울이면 천천히, 큰 각도로 기울이면 더 빠르게 이동했다.
실험은 4명의 참여자가 각 조작 도구를 사용하여 목표 지점에 도달하는 시간을 측정하였다. 목표는 가이드와이어를 100 mm 이동시키는 것이었으며, 이는 ERCP 시술 중 일반적인 담관(Bile Duct) 길이를 기준으로 설정되었다. 목표를 초과하거나 벗어나지 않도록 경고가 제공되었다. 마스터 디바이스와 속도 제어 조이스틱의 성능 비교를 위해 Fitts' Law의 Throughput을 사용하였다. Throughput은 이동 시간과 정확도를 통합하여 제어 방식의 효율성을 객관적으로 평가하며, 다양한 작업 조건에서도 일관된 비교를 가능하게 한다.
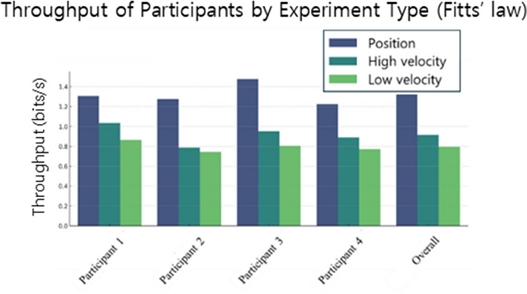
Fig. 15는 Fitts’ Law 실험 결과이다. 여기서 Position 결과는 마스터 디바이스의 수평 이동 제어 핸들, High Velocity는 기울기 대비 빠른 속도로 제어하는 속도제어 조이스틱, Low Velocity는 기울기 대비 느린 속도로 제어하는 속도제어 조이스틱을 의미한다. 4명의 참가자 데이터를 Fitts’ Law 처리량(throughput, bits · s
⁻1)으로 환산한 결과, Position-control 마스터 디바이스가 1.31 ± 0.11 bits/s로 High-velocity 조이스틱(0.92 ± 0.10 bits/s)과 Low-velocity 조이스틱(0.79 ± 0.05 bits/s)을 모두 크게 상회하였다. 대응 효과크기(Cohen’s d_z)는 각각 3.28과 4.62로 ‘매우 큰 효과(Very Large)’ 범주에 속한다. 즉, 동일 정확도로 목표를 달성할 때 Position-control 방식이 High-velocity 대비 4 2%, Low-velocity 대비 66% 더 높은 작업 효율을 제공한다.
Fig. 15Fitts’ law throughput comparison of participants
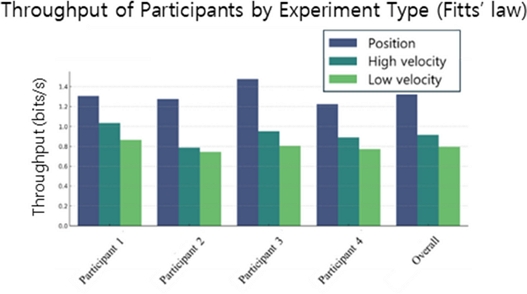
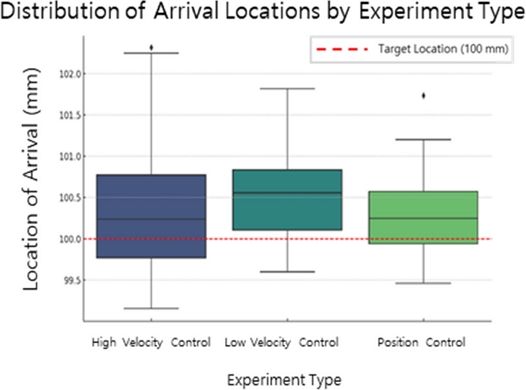
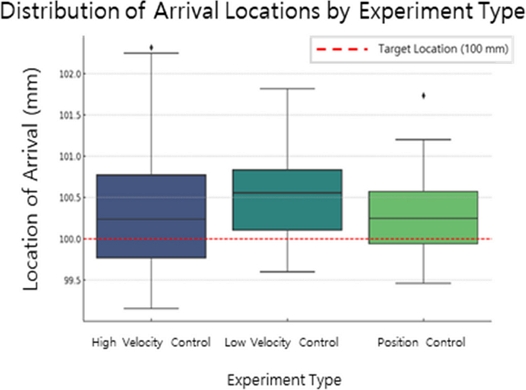
Fig. 16의 Box-plot은 목표 위치(100 mm) 대비 도착 오차의 분포를 요약한다. 중앙값 기준 오차는 Position-control이 +0.20 mm로 가장 작았고, High-velocity +0.25 mm, Low-velocity +0.55 mm가 뒤를 이었다. 또한 Position-control의 IQR이 ≈ 0.95 mm로 가장 좁아 참가자 간 일관성이 높았으며, 최대 오차도 1.2 mm를 넘지 않아 임상 허용 오차(≤ 2 mm)를 충분히 만족시켰다. 이는 제안된 마스터 디바이스가 조이스틱 기반 속도 제어보다 정밀 조작에 우수함을 뒷받침한다
Fig. 16Box plot of distance error from target
4.3 핸들 단독 토크 보상 검증 실험
실험은 수평 이동 제어 핸들에서 측정된 힘과 모터 토크 간의 비교를 통해 토크 보상의 정확성을 검증했다. 목표 토크와 실제 측정된 힘은 핸들이 고정된 상태와 움직이는 상태에서 모두 비교되었다.
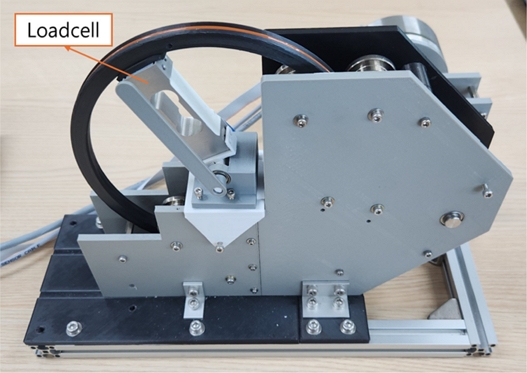
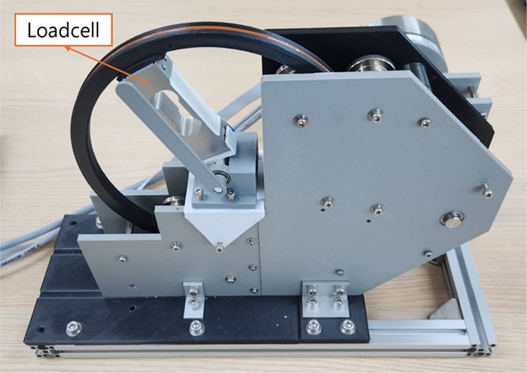
Fig. 17에서 토크를 측정하기 위해 로드셀을 고정한 모습을 확인할 수 있다. 로드셀 하단은 베어링으로 회전이 가능해 손잡이 따라 회전할 수 있는 구조로 되어있다.
Fig. 17Experiment setup for torque measurement
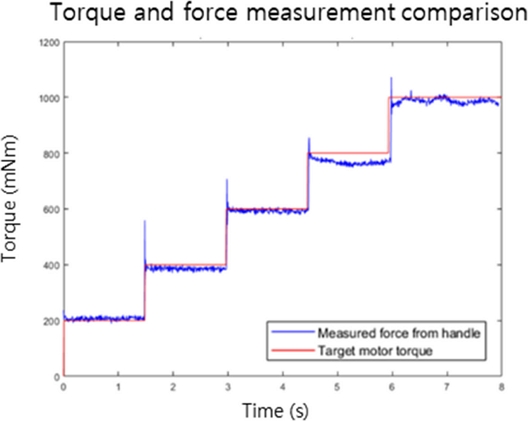
핸들이 정지 상태일 때, 목표 토크와 측정된 힘의 비교 결과는
Fig. 18에 나타나 있으며, 각 목표 토크에 대한 RMSE는
Table 2에 요약되었다. 각 목표 토크 대비 RMSE(%)는 4 .7% 이하의 오차가 측정되었다.
Fig. 18Target torque and measured torque from the translation control handle comparison when the handle is steady
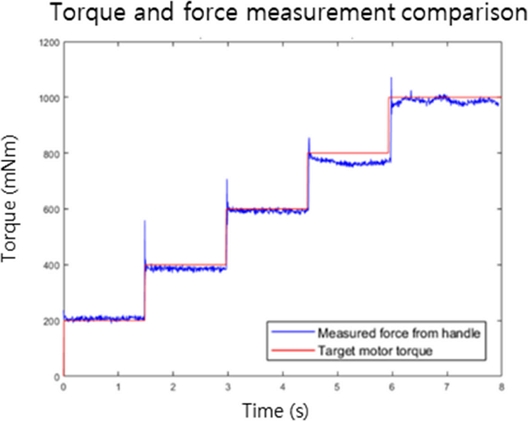
Table 2RSME of each target torque
Table 2
Target Torque
[mNm] |
RMSE
[mNm] |
RMSE/target
[%] |
|
200 |
9.47 |
4.7 |
|
400 |
15.88 |
4.0 |
|
600 |
10.09 |
1.7 |
|
800 |
35.91 |
4.5 |
|
1000 |
15.86 |
1.6 |
|
Average |
17.44 |
3.3 |
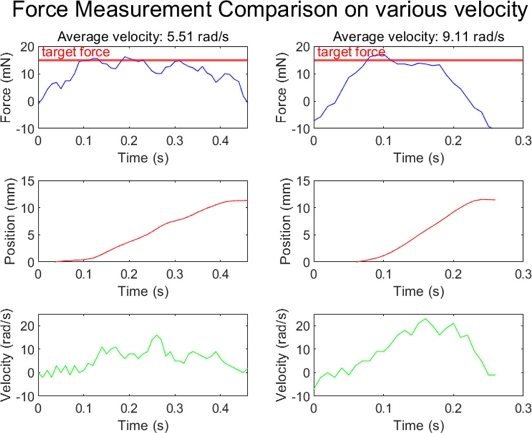
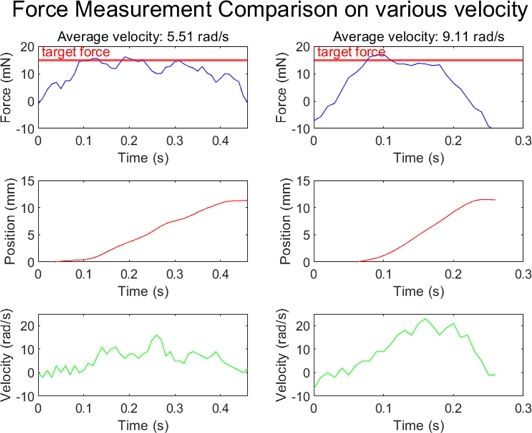
Fig. 19는 핸들이 움직이는 동안의 힘 측정한 결과이며, 피드백의 Target Force는 15 mN을 목표로 했다. 손끝에서 Quasi-static 자극에 대한 최소 지각 힘이 약 15 mN 정도로, 인체 감각계를 고려해 15 mN 이상이면 대부분의 사용자가 확실히 인지 가능하기 때문에 15 mN으로 설정했다
[15]. 5.51 rad/s와 9.11 rad/s의 두 가지 평균 속도에서 수행되었다. 5.51 rad/s에서는 RMSE가 3.96 mN, 속도를 약 65% 높인 9.11 rad/s에서는 RMSE가 9.15 mN로 증가했다.
Fig. 19Target force and measured force from the translation control handle comparison when the handle is moving on various velocity
4.4 모의 ERCP 실험
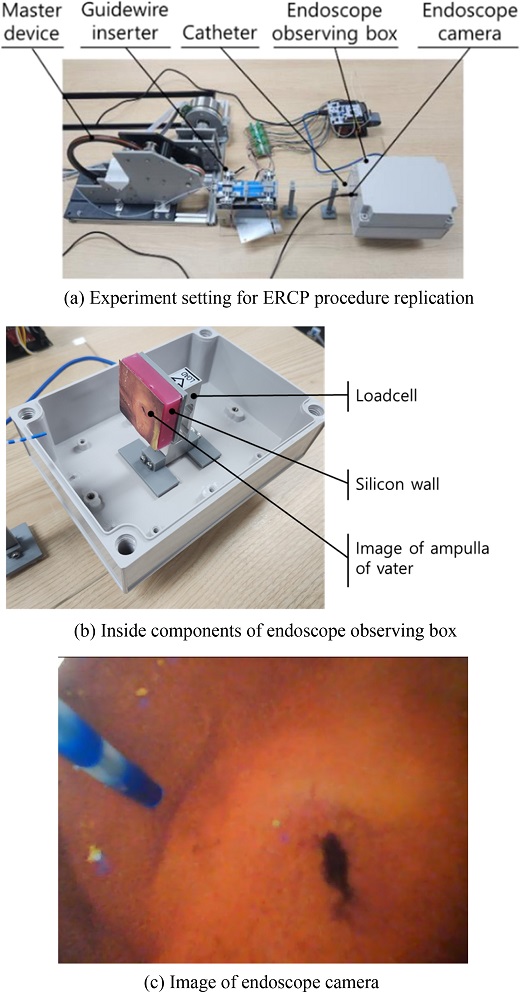
힘 피드백이 수술 안전성에 미치는 영향을 검증하기 위해 모사 ERCP가 수행되었다. 이 실험은 ERCP 시술 중 내시경 카메라에만 의존해야 하는 상황을 모사했다. 실제 상황을 모사하기 위해 10 mm 두께의 실리콘 벽과 목표 부위인 유두부 이미지를 사용해 생체 모방 환경을 구현하였다. 모사 ERCP 는 힘 피드백이 없는 경우와 있는 경우 두 가지로 나뉘어 진행되었다.
Fig. 20(a)에서 모의ERCP 모의 실험을 위한 장치를 확인할 수 있다.
Figs. 20(b)는 모사 ERCP 장치의 내부 구성 요소들을 보여주며,
20(c)는 내시경 카메라로 본 유두부 이미지로 접근하는 카테터를 보여준다.
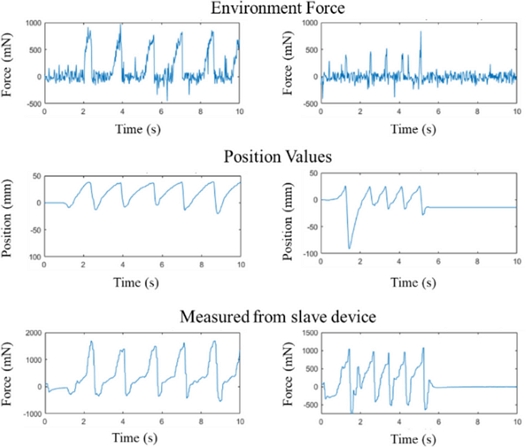
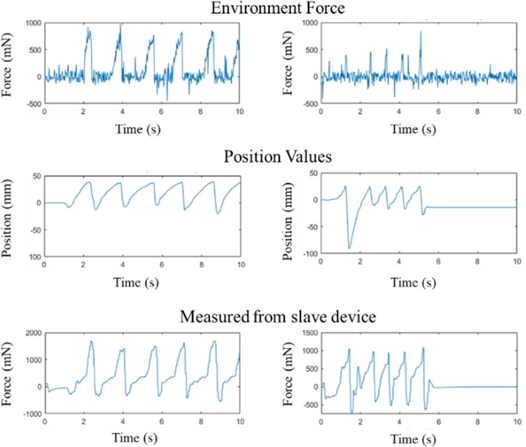
Fig. 21에서 Environment Force는 실리콘 벽에서 측정된 힘, Position Values는 마스터 디바이스의 손잡이 이동 거리, Measured from Slave Device는 슬레이브 디바이스 로드셀에서 측정된 힘을 나타낸다. 힘 피드백이 없는 경우, 사용자는 카테터가 굽히거나 환경이 눌리는 것만으로 충돌 여부를 판단해야 했다. 반면, 힘 피드백이 있는 경우, 충돌이 발생했을 때 이를 즉시 인지할 수 있었다. 카테터가 투명 관을 통과하면서 이동을 하기 때문에 마찰의 영향으로 카테터의 충돌이 일어나기 전에 슬레이브 디바이스에서 측정되는 힘이 조금씩 증가를 하다가, 충돌 직후 갑자기 증가하는 점을 확인할 수 있다. Environment Force의 RMS는 피드백이 없는 경우 210 mN, 피드백이 있는 경우 82 mN으로, 61% 감소했다는 점을 확인할 수 있다. 이는 민감 조직을 다루는 ERCP 시술에서 안전성을 높일 수 있을 것으로 해석된다.
Fig. 20Experiment setting and components for ERCP procedure replication
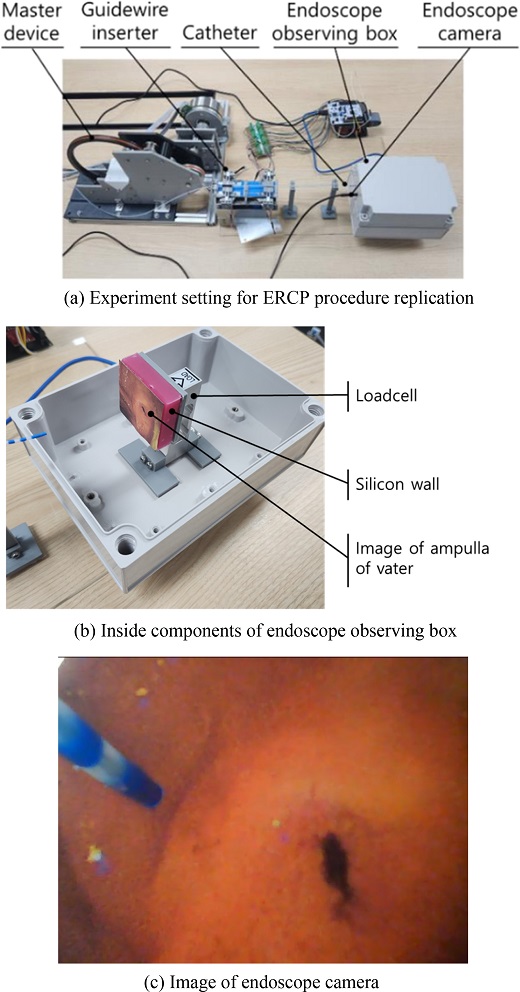
Fig. 21Force measurement from loadcell, distance of master device’s handle movement, force measurement from slave device
5. 결론
본 연구는 ERCP 가이드와이어 삽입을 원격 조작하기 위해 특화된 힘 피드백 기능의 마스터 디바이스를 소개한다. 이 디바이스는 기존 원격 조작 시스템에서 흔히 지적되는 중요한 한계를 해결하고자 고안되었다. 구체적으로, 내시경을 잡고 수술 도구를 조작하는 손 움직임을 모방하도록 마스터 디바이스 디자인을 완성했고, 원격 수술 시 정밀도를 유지하기 어려운 문제 등을 개선한다. 제안된 시스템은 외과의의 자연스러운 손 동작에서 착안한 설계 원리를 적용함으로써, 외과의가 기존에 익숙한 기술을 그대로 활용할 수 있는 직관적인 인터페이스로 적응 과정을 최소화한다.
마스터 디바이스는 이중 핸들 구조를 채택했다. 먼저, 링(Ring) 형태의 핸들은 가이드와이어를 삽입하는 수평 움직임을 자연스럽게 재현할 수 있도록 설계되어, 매끄럽고 제한없는 수평 이동이 가능하다. 두 번째로, 원통형(Cylindrical) 핸들은 가이드와이어 끝 부분을 조종하기 위해 필요한 회전 동작을 재현한다. 이 두 가지 핸들을 함께 사용함으로써 원격 조작되는 가이드와이어의 직관적이고 정확한 제어가 가능해진다. 추가적으로, 이 디바이스에는 힘 피드백 메커니즘이 탑재되어 있어, 슬레이브 디바이스와의 상호 작용에서 발생하는 힘을 실시간으로 사용자에게 전달한다. 이를 통해 외과의는 실제 수술 현장에서 충돌이나 저항을 즉각적으로 감지하고, 피드백 힘을 외과의에게 전달해 환부에 손상을 일으키지 않도록 보조한다.
실험 결과, 제안된 마스터 디바이스의 성능이 검증되었다. 제안된 디바이스는 기존 원격 조작 시스템 대비 제어 정밀도, 힘 피드백 정확도, 그리고 핸들 조작 시의 관성 저감 측면에서 큰 향상을 보였다. 특히, 핸들의 제한 없는 동작 범위 덕분에 기존 위치 제어 컨트롤러에서 흔히 겪던 반복적인 위치 재조정이 불필요해졌다. 뿐만 아니라, 힘 피드백 시스템은 수술 중 상황 인식을 강화하는 핵심 요소로 작용하여, 민감한 조직이나 장기에 과도한 힘이 가해지지 않도록 외과의가 실시간으로 조절할 수 있게 하였다.
이러한 성능상의 장점과 더불어, 본 디바이스는 ERCP 시술과 관련된 중요한 의료진 건강 문제, 즉 방사선 노출 위험에 대한 해결책도 제시한다. 원격 조작을 통해 수술이 가능해지면, X선 장비 주변에서 지속적으로 머무를 필요가 줄어들어, 수술의 효율성은 유지하면서도 의료진이 방사선에 노출되는 위험을 줄 일 수 있다.
본 연구의 결과는 제안된 마스터 디바이스가 원격 ERCP 시술에서 환자 안전과 수술 성과를 향상시킬 잠재력을 지니고 있음을 보여준다. 직관적인 설계로 인해 외과의는 기존에 습득한 숙련도를 그대로 활용할 수 있고, 힘 피드백의 통합은 복잡한 수술 환경에서 정교하고 안전한 원격 조작을 가능케 한다.
향후 연구에서는 기계 부품과 제어 알고리즘을 더욱 정교하게 개선하여 디바이스의 성능을 최적화할 수 있을 것이다. 또한 고급 센싱 기술과 적응형 알고리즘을 통합함으로써, 차세대 원격 조작 시스템이 더욱 높은 정밀도, 안전성, 그리고 사용 편의성을 제공할 수 있을 것으로 기대된다.
ACKNOWLEDGMENTS
이 성과는 정부(과학기술정보통신부)의 재원으로 한국연구재단의 지원을 받아 수행된 연구임(No. RS-2022-NR070232).
REFERENCES
- 1.
Korean Pancreatobiliary Association, (2022), ERCP, 2nd Edition, Koonja Publishing.
- 2.
- 3.
Yu, H., Wang, H., Chang, J., Niu, J., Wang, F., Yan, Y., Tian, H., Fang, J., Lu, H., (2021), A novel vascular intervention surgical robot based on force feedback and flexible clamping, Applied Sciences, 11(2), 611.
10.3390/app11020611
- 4.
Li, W., Que, D., Omisore, O. M., (2021), A gaussian-based guidewire segmentation and tracking method for teleoperated robotic intravascular interventions, Proceedings of the 5th International Conference on Robotics and Automation Sciences, 38-43.
10.1109/ICRAS52289.2021.9476273
- 5.
Guo, J., Guo, S., Yu, Y., (2016), Design and characteristics evaluation of a novel teleoperated robotic catheterization system with force feedback for vascular interventional surgery, Biomedical Microdevices, 18(5), 76.
10.1007/s10544-016-0100-0
- 6.
Sankaran, N. K., Chembrammel, P., Siddiqui, A., Snyder, K., Kesavadas, T., (2018), Design and development of surgeon augmented endovascular robotic system, IEEE Transactions on Biomedical Engineering, 65(11), 2483-2493.
10.1109/TBME.2018.2800639
- 7.
Chen, P., Wang, Y., Tian, D., Guo, Y., Xu, K., (2023), The catheter and guidewire operating systems of vascular interventional surgical robots: A systematic review, IEEE Transactions on Medical Robotics and Bionics, 5(2), 180-195.
10.1109/TMRB.2023.3272049
- 8.
Bao, X., Guo, S., Yang, C., Zheng, L., (2023), Haptic interface with force and torque feedback for robot-assisted endovascular catheterization, IEEE/ASME Transactions on Mechatronics, 29(2), 1111-1125.
10.1109/TMECH.2023.3290492
- 9.
Xie, Y., Hou, X., Wang, S., (2023), Design of a novel haptic joystick for the teleoperation of continuum-mechanism-based medical robots, Robotics, 12(2), 52.
10.3390/robotics12020052
- 10.
Song, C., Xia, S., Zhang, L., Wang, K., Li, H., Guo, W., Zhu, L., Lu, Q., (2023), A novel endovascular robotic-assisted system for endovascular aortic repair: First-in-human evaluation of practicability and safety, European Radiology, 33(11), 7408-7418.
10.1007/s00330-023-09810-x
- 11.
Bao, X., Guo, S., Xiao, N., Li, Y., Shi, L., (2018), Compensatory force measurement and multimodal force feedback for remote-controlled vascular interventional robot, Biomedical Microdevices, 20(3), 74.
10.1007/s10544-018-0318-0
- 12.
Xiang, Y., Shen, H., Xie, L., Wang, H., (2019), Master-slave guidewire and catheter robotic system for cardiovascular intervention, Proceedings of the 28th IEEE International Conference on Robot and Human Interactive Communication, 1-6.
10.1109/RO-MAN46459.2019.8956423
- 13.
Wang, Y., Guo, S., Xiao, N., Li, Y., Jiang, Y., (2018), Online measuring and evaluation of guidewire inserting resistance for robotic interventional surgery systems, Microsystem Technologies, 24(8), 3467-3477.
10.1007/s00542-018-3750-4
- 14.
Yin, X., Guo, S., Hirata, H., Ishihara, H., (2016), Design and experimental evaluation of a teleoperated haptic robot-assisted catheter operating system, Journal of Intelligent Material Systems and Structures, 27(1), 3-16.
10.1177/1045389X14556167
- 15.
Youn, J.-H., Jang, S.-Y., Hwang, I., Pei, Q., Yun, S., Kyung, K.-U., (2025), Skin-attached haptic patch for versatile and augmented tactile interaction, Science Advances, 11(12), eadt4839.
10.1126/sciadv.adt4839
Biography
- Woocheol Shin
Ph.D. candidate in the Department of Mechanical Engineering, Korea University. His research interest is design and control of surgical robot.
- SeongHyeon Won
Ph.D. candidate in the Department of Mechanical Engineering, Korea University. His research interest is design and control of surgical robot.
- YongJung Lee
M.S. candidate in the Department of Mechanical Engineering, Korea University. His research interest is vision based control of surgical robot.
- Daehie Hong
Professor in the Department of Mechanical Engineering, Korea University. His research interests include manufacturing automation, precision machine design and control, surgical robot and field robotics.