ABSTRACT
The rising demand for robots in warehouses has highlighted the need for efficient multi-robot algorithms. In response, researchers have focused on Multi-Agent Path Finding (MAPF), which enables multiple agents to calculate conflict-free paths to their individual goals. However, the computation time of conflict-based MAPF algorithms significantly increases as the number of conflicts rises, a common challenge in warehouse environments with narrow passages or corridors. To tackle this issue, this study introduces a new type of conflict called “Overlap Conflict.” Overlap Conflicts occur when an agent stops, causing chain conflicts among subsequent agents traveling in the same direction. When an Overlap Conflict arises, the affected agents are dynamically merged into a single group, shifting the conflicts from an individual level to a group level. If the merged agents find themselves with unreachable goals, they are split back into individual agents to continue calculating paths to their respective destinations. This approach effectively reduces computation time in congested environments, particularly in narrow corridors where alternative routes exist.
-
KEYWORDS: Multi-agent path finding, Collision based search, Path planning, Robot navigation
-
KEYWORDS: 다중 에이전트 경로 탐색, 충돌 기반 탐색, 경로 탐색, 로봇 네비게이션
1. Introduction
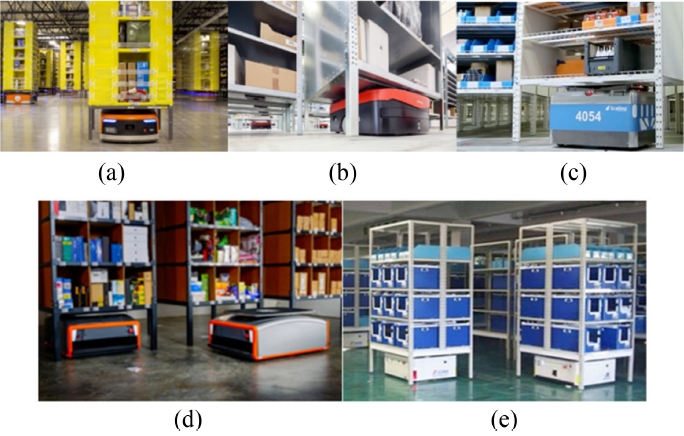
As global robot supply chains become increasingly complex and consumer demand diversifies, relying solely on traditional multiagent distribution methods are no longer sufficient to guarantee the efficiency of logistics operations. In response, the adoption of robot-assisted warehouses, as shown in
Fig. 1, is gaining importance. In line with this trend, research of Multi-Agent Path Finding (MAPF) is being vigorously conducted. This algorithm aims to find nonconflicting paths for multiple agents to reach their respective destinations within shared environments.
MAPF has been actively studied from various perspectives. Algorithms that merge agents [
1,
2] or assign priorities among agents [
3-
5] have attempted to reduce computation time. However, assigning priorities to agents has the drawback of not guaranteeing the optimality of the solution. Other algorithms have aimed to find an optimal solution by resolving conflicts between agents, but the computation time swells exponentially as the number of conflicts grows [
6-
9]. To address this, some algorithms have defined additional conflict types or proposed new constraints to reduce computation time and explore suboptimal solutions [
11-
15]. However, even these approaches have not sufficiently mitigated the exponential increase in computation time caused by conflicts in congested environments.
In warehouses, corridors or passageways are often designed to be narrow to maximize space utilization, which frequently forces multiple agents to share the same route. When a leading agent unexpectedly stops in such restricted spaces, it can trigger a chain of conflicts among following agents. These chain conflicts are considerably more complex than isolated conflicts, leading to significant delays in re-planning routes, particularly in congested environments. To address this challenge, we propose a new algorithm, OverlapCBS, which introduces a new type of conflict, termed the Overlap Conflict, specifically designed to handle these chain conflicts. OverlapCBS reduces computation time by dynamically merging and splitting agents based on their paths when conflicts occur, thereby efficiently resolving conflicts in such environments. This approach aims to overcome the limitations of previous methods and improve overall efficiency in warehouse logistics.
2. Theoretical Background
2.1 Problem Definition
This study refines the Conflict-Based Search (CBS) algorithm [
6] as its fundamental framework. The MAPF problem [
16,
17] is represented by a graph
G = (
V, E) and a set of
k agents.
V represents locations, each of which can be exclusively occupied by a single agent and
E stated the connections between two vertices. Each agent is assigned a
Task, defined as a tuple {
starti,
goali} consisting of a unique start state and goal state, where an agent
ai has
starti starti ∈
V and
goali ∈
V. Time is assumed to be discretized, and at each timestep, an agent can take a single action: either
moving or
waiting. The solution to the MAPF problem consists of a set of conflict-free paths, denoted as
= {
π1,
π2, ...,
πk}, where k means the number of agents and
πk denotes the path of
ak. Each path is associated with a sequence of tuples {
vertex, timestep}. In the MAPF problem, there are two types of conflicts:
vertex conflicts and
edge conflicts.
Vertex conflicts occur when two agents
ai and
aj occupy the same vertex
v simultaneously, which is formally defined as {
ai,
aj,
v, t}.
Edge conflicts occur when two agents
ai and
aj swap vertices through the same edge, at the same time
t, which is denoted as {
ai,
aj,
vi,
vj,
t}. All paths satisfy the following conditions: 1. every agent starts at its predefined initial state and reaches its goal state, 2. no
vertex conflicts or
edge conflicts exist among the paths. In this study, we utilize the sum of costs as the objective function to evaluate solutions and aim to minimize it.
CBS searches for paths for each agent and detects conflicts between agents’ paths. When a conflict occurs, it generates constraints to resolve the conflict and modifies the paths accordingly. A vertex constraint prohibits agent ai from occupying vertex v at time t, denoted as {ai, v, t}. An edge constraint prohibits agent ai from moving from vertex vi to vj at time t, denoted as {ai, vi, vj, t}. CBS operates on two search levels. The high-level is responsible for identifying and resolving conflicts between agents by comparing their individual paths. This process is managed using a binary tree structure known as the Constraint Tree (CT), in which each node consists of three key components.
1) N.constraints
A set of constraints, each of which illustrates constraints for a single agent.
2) N. solution
A set of paths, each consisting of the individual agent’s path that complies with the constraints applied to that node.
3) N. cost
The total cost is calculated using an objective function. The high-level search utilizes this cost as a metric to prioritize nodes, aiming to find a solution that minimizes the chosen cost while avoiding conflicts.
The root node of the CT starts with an empty set of constraints. When a conflict is detected in the N. solution, the high-level search generates a new constraint and two child nodes, each inheriting the constraints of its parent and incorporating the newly generated constraint, respectively. These child nodes resolve the conflict by enforcing different constraints on each agent involved. The lowlevel search computes paths for individual agents while adhering to the given constraints. In this study, we apply the A* algorithm as the fundamental search method for the low-level search. The CBS algorithm continues this process until a conflict-free N. solution is found, resulting in a goal node in the CT that contains a valid set of paths for all agents.
3. Methodology
3.1 Overlap Conflict Definition
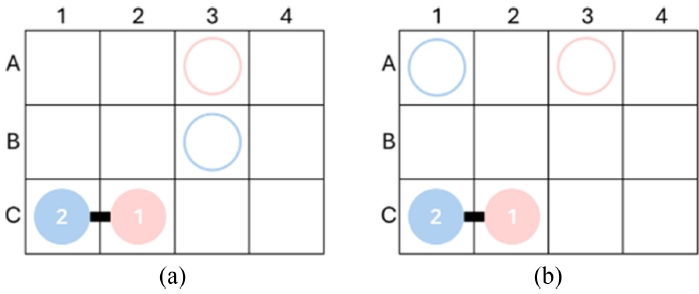
To effectively address scenarios in congested environments, this paper proposes a new type of conflict, termed the Overlap Conflict. This concept enables the efficient handling of chain conflicts that occur when multiple agents move through the same narrow corridors in the same direction. The traditional vertex conflict is further categorized into Single Vertex Conflict and Overlap Conflict, based on whether the paths of two agents continue to overlap following an initial conflict. This study introduces three types of conflicts: Single Vertex Conflict, Overlap Conflict, and Edge Conflict. The Edge Conflict is defined based on CBS, while the definitions of Single Vertex Conflict and Overlap Conflict are provided below.
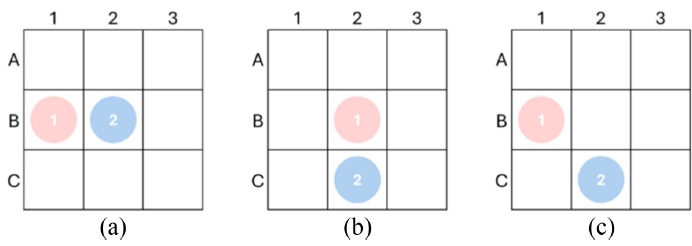
1) Single Vertex Conflict
A Single Vertex Conflict is defined as a tuple {
ai,
aj,
v, t, S}. It represents a conflict that occurs when agents
ai and
aj occupy vertex
v at the same time
t.
S is a boolean variable used to distinguish it from an Overlap Conflict. For instance,
Fig. 2(a) illustrates a Single Vertex Conflict where agents
a1 and
a2 occupy vertex
B2 at the same time
t0. It is represented as the tuple {
a1,
a2,
B2,
t0,
False}.
2) Overlap Conflict
An Overlap Conflict is defined as a tuple {
ai,
aj,
v, t, O}. It represents a conflict that occurs when agents
ai and
aj occupy vertex
v at the same time
t0.
O is a boolean variable used to distinguish it from a Single Vertex Conflict. For instance,
Fig. 2(b) illustrates an Overlap conflict that occurs when agents.
a1 and
a2 successively occupy vertex
B2 at times
t0. It is repsresented as the tuple {
a1,
a2,
B2,
t0,
True}.
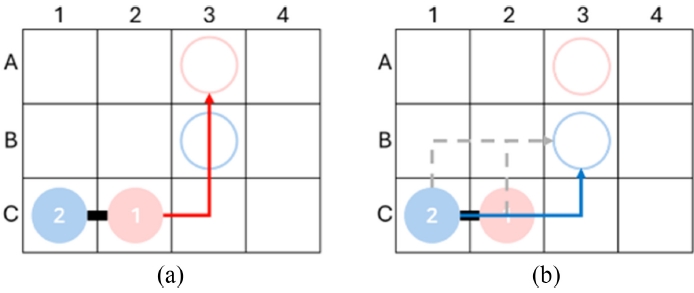
To resolve conflicts between agents, appropriate constraints for each conflict type are required. The Single Vertex Constraint and Edge Constraint follow the same definitions as those in CBS. The Overlap Constraint is defined as a tuple {
ai,
aj,
t} where
ai is designated as the head agent, aj as the tail agent, treating the two agents as a single merged agent set starting from time
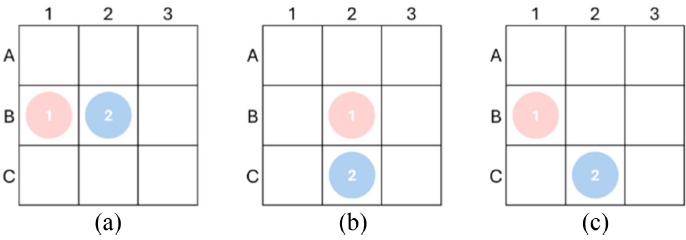
t. A merged agent set moves together while maintaining a one-timestep distance, where timestep distance refers to the minimum number of timesteps required for an agent to move from its current vertex to another agent’s vertex. For instance, as illustrated in
Figs. 3(a) and
3(b), if two agents are located in adjacent vertices, they have a onetimestep distance. In contrast, as shown in
Fig. 3(b), the agents have a 2-timestep distance, as agent 1 takes two-timesteps to reach the vertex where Agent 2 is located.
Each agent can have at most one head agent and at most one tail agent. For instance, consider a merged set of three agents, as depicted in
Fig. 3(a). Assuming that Agent 1 is positioned at the front in the direction of movement, Agent 1 has no head agent and designates Agent 2 as its tail agent. Agent 2 has Agent 1 as its head agent and Agent 3 as its tail agent, while Agent 3 has Agent 2 as its head agent and no tail agent. In contrast, configurations where an agent is associated with more than one head agent (as shown in
Fig. 3(b)) or more than one tail agent (as shown in
Fig. 3(c)) are not permitted.
A state is defined as a tuple {vertex, time, head, tail}, where each component represents the current status of an agent and its dependency relationships with other agents. Specifically, vertex denotes the graph vertex at which the agent is located at time; time is the discrete timestep corresponding to that state, indicating when the agent occupies the vertex; head represents the head agent that the current agent is following, thereby highlighting the dependency relationship; and tail denotes the tail agent that is following the current agent, indicating that the current agent acts as a leader. This structure not only captures the agent’s current position and time but also explicitly defines the dependency relationships between agents.
3.4 High Level Search of OverlapCBS
Algorithm 1 describes the high-level search process in OverlapCBS. The basic flow of the algorithm follows that of CBS (Lines 1-8). However, OverlapCBS generates two distinct constraints for each left and right nodes, denoted as
Cl and (Line 10), to resolve a detected conflict. These constraints are defined for the conflicting agents or agent sets and may incorporate constraints for multiple agents, depending on the situation. Based on the generated
Cl and
Cr, new CT nodes are created, adding the corresponding constraints to each node (Line 14). Subsequently, the low-level solver recalculates the paths for the individual agents subject to these constraints. Once the paths for all agents in the constraint lists are recalculated, the cost of the solution is computed, and the success of the solution is evaluated (Line 18). If a valid solution is found, the corresponding node is added to the OPEN set (Line 19). This process repeats until a node is retrieved from the OPEN set whose paths are conflictfree. In that case, the algorithm returns the solution (Line 8) and terminates.
3.4.1 Find First Conflict
It is necessary to first generate a path for a single agent and then compare the paths between agents to identify conflicts.
Algorithm 2,
get_first_conflict(), identifies and returns a conflict from a CT node solution by comparing two agents’ paths. For each timestep
t from 0 to
maxt, the algorithm checks the agent’s positions, where
cv (current vertex) is the vertex at
t and
nv (next vertex) is the adjacent vertex the agent moves to (Lines 5-8).
3.4.2 Create Constraint from Conflict
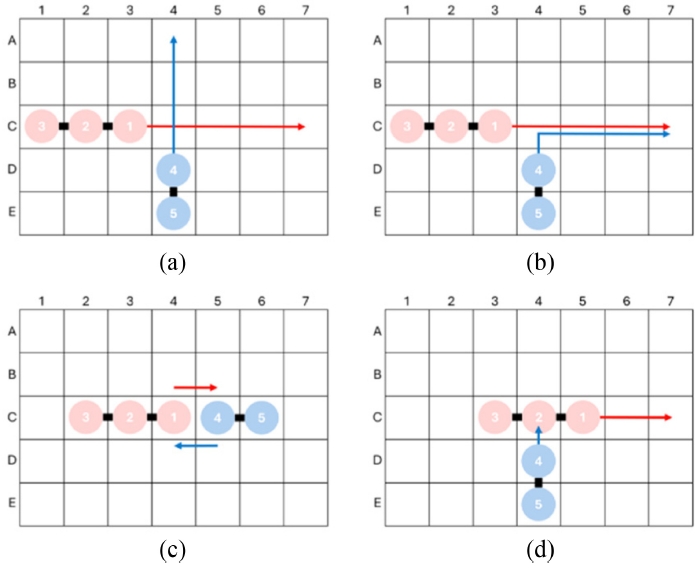
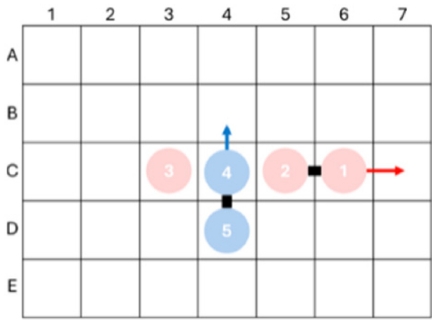
Once conflicts among agents are identified, appropriate constraints must be generated to resolve them. For single-agent pair conflicts, constraints are generated as in CBS. However, in OverlapCBS, conflicts may occur between merged agent sets (e.g.,
Fig. 4), requiring constraints for the entire set without disconnecting its agents. All of the examples in
Fig. 4 are designated the pink agent set as agent-set 1 and the blue agent set as agent-set 2.
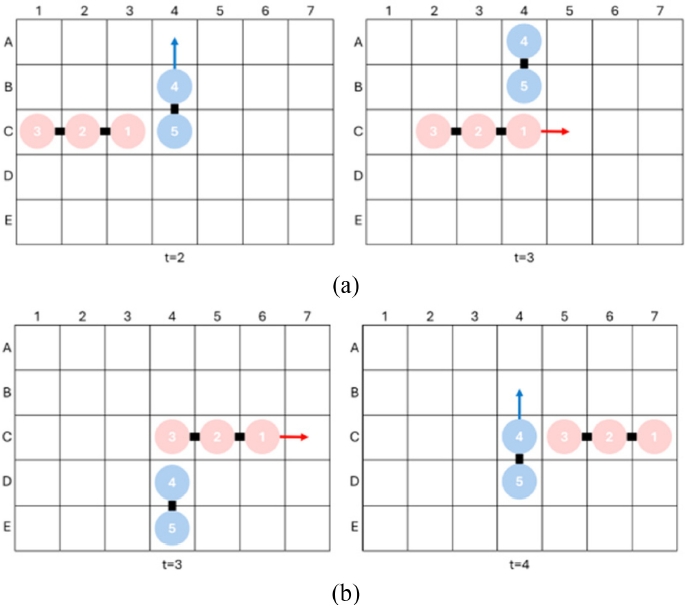
1) Single Vertex Conflict between head agents
Fig. 4(a) illustrates a scenario in which a single vertex conflict occurs between the agent-set 1 and the agent-set 2 at timestep 0. In this situation, constraints are generated without breaking the internal connections within the agent sets. When constraints are applied to agent-set 1, two constraints, {1,
C4, 1}, and {4,
C4, 2}, are imposed on agent 4, leading to the movement pattern shown in
Fig. 5(b).
2) Overlap Conflict between head agents
Fig. 4(b) illustrates a scenario where an overlap conflict occurs between the agent-set 1 and the agent-set 2. In this situation, constraints are generated without breaking the internal connections within the agent sets. When constraints are applied to agent-set 1, two single vertex constraints, {1,
C4, 1} and {1,
C4, 2}, along with one overlap constraints, {4,
C4, 1}, {4,
C4, 2}, and {4,
C4, 3}, along with one overlap constraint, {3, 4, 3}, are imposed on agent 4, resulting in the movement pattern shown in
Fig. 6(b).
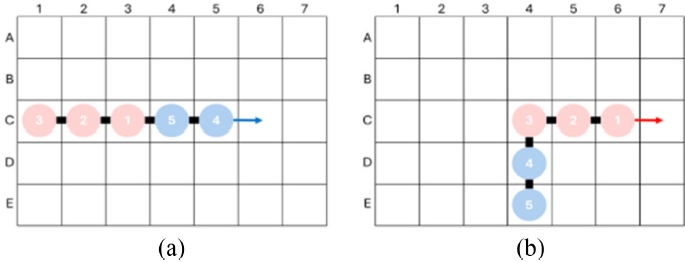
3) Edge Conflict between head agents
Fig. 4(c) illustrates a scenario where an edge conflict occurs between the agent-set 1 and the agent-set 2. In this case, constraints are also generated without breaking the connections within the agent sets. When constraints are applied to agentset 1, and a vertex constraint {2,
C4, 1} is imposed on agent 2. This process involves sequentially inspecting conflicts for each agent in the agent set and generating constraints for each detected conflict. Applying such constraints to agent-set 1 results in the movement pattern shown in
Fig. 7(a). Conversely, when constraints are applied to agent-set 2, and edge constraint {4,
C5,
C4, 1} is imposed on agent 4, and a vertex constraint {5,
C5, 1} is imposed on agent 5, resulting in the movement pattern shown in
Fig. 7(b).
4) Single Vertex Conflict between head agent and middle agent
As shown in
Fig. 4(d), a conflict can occur between the middle agent of the pink agent set (agent-set 1) and the head agent of the blue agent set (agent-set 2). In this case, to avoid breaking the connections within the agent sets, constraints are applied only to agent-set 2. When constraints are applied to agent-set 2, a single vertex constraint {4,
C4, 1} is imposed on agent 4, resulting in a movement pattern similar to that shown in
Fig. 5(b). However, if constraints are applied to agent-set 1, it would break the connections within agent-set 1, as shown in
Fig. 8. Therefore, no constraints are generated for agent-set 1 in this scenario.
The
algorithm 3 represents a modified low-level search process for CBS, incorporating the ability to follow a designated head agent whenever applicable. If no head agent exists to follow, the algorithm operates identically to the standard CBS low-level search. However, if a head agent is present, the agent prioritizes staying directly behind the head agent. If following directly is not possible, the agent attempts to move adjacent to the head agent. If neither of these options is feasible, the algorithm disconnects the head-tail relationship, effectively splitting the agent set.
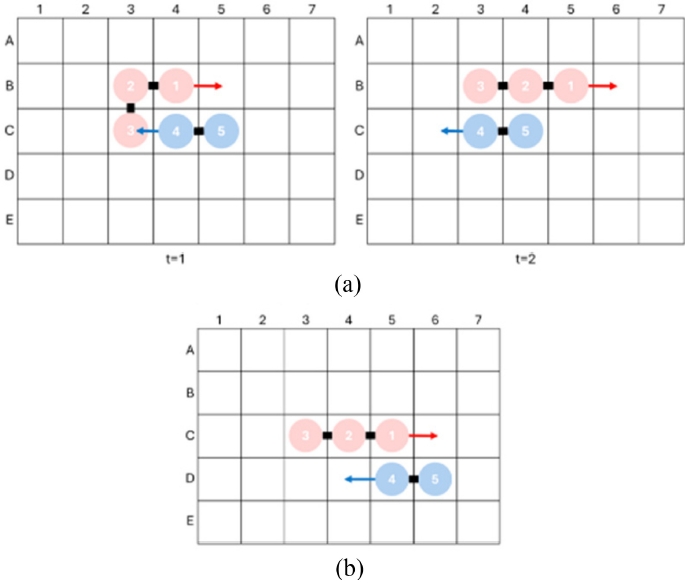
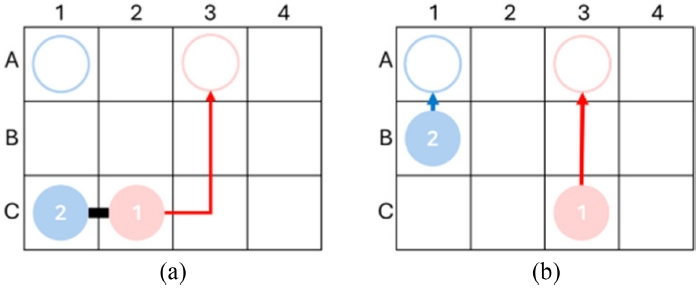
To determine the path of a merged agent set, the pathfinding process must proceed sequentially, starting with the head agent then moving to the tail agent. This can be illustrated using the scenario in
Fig. 9(a). In the figure, agent 1 is the head agent, and agent 2 is the tail agent. First, the path for the head agent is calculated, as shown in
Fig. 10(a). Next, the path for the tail agent is planned to follow the head agent’s path as closely as possible, as depicted in
Fig. 10(b). However, as shown in
Fig. 9(b), there are cases where the tail agent cannot reach its goal location if it continues to follow the head agent. In such situations, as illustrated in
Fig. 11, the agent set is split at the point where the tail agent’s cost increases due to following the head agent. From that point onward, the tail agent independently plans its path as a single agent.
4. Experiments
4.1 Evaluation Setup
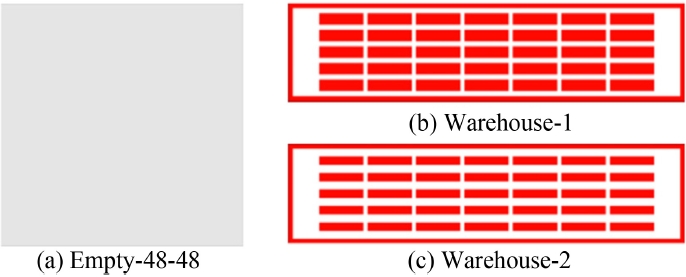
To evaluate the performance of the proposed algorithm, we conducted comparative experiments with the CBS algorithm using the three maps shown in
Fig. 12. In each environment, 25 scenarios were generated by randomly assigning start and goal positions to the agents, and the experiments were conducted while progressively increasing the number of agents. The specific characteristics of each environment are as follows:
1) Empty-48-48
This is a 48 × 48 grid map with no obstacles, representing an open space. Overlap conflicts are expected to occur infrequently, making it suitable for evaluating the algorithm under general conditions.
2) Warehouse-1
This is a 90 × 18 warehouse map with a single narrow corridor. Due to its narrow pathways, Overlap conflicts are expected to occur frequently. It evaluates the algorithm in environments with frequent conflicts and no alternative routes.
3) Warehouse-2
This is a 90 × 24 warehouse map with double corridors. Similar to Warehouse-1, Overlap conflicts are expected to occur frequently, but alternative routes are available, allowing evaluation under such conditions.
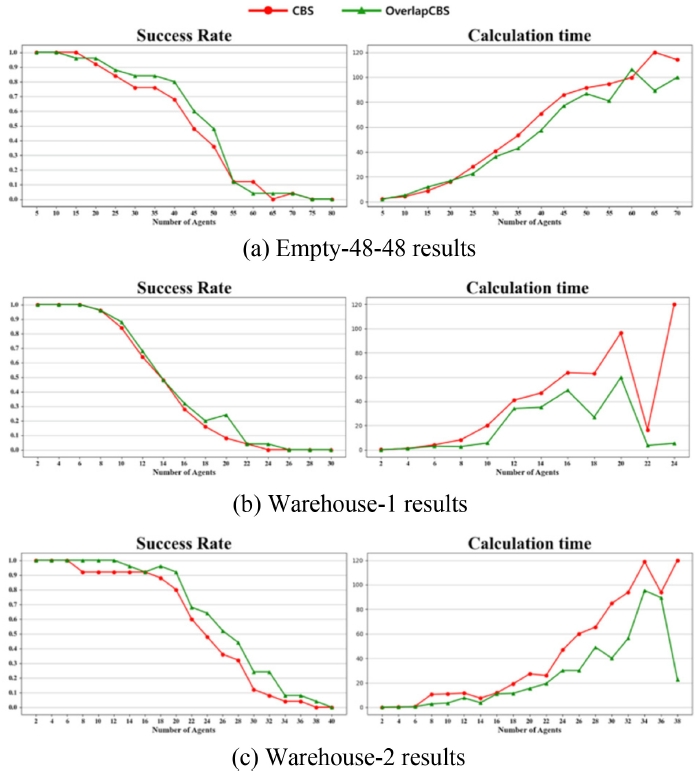
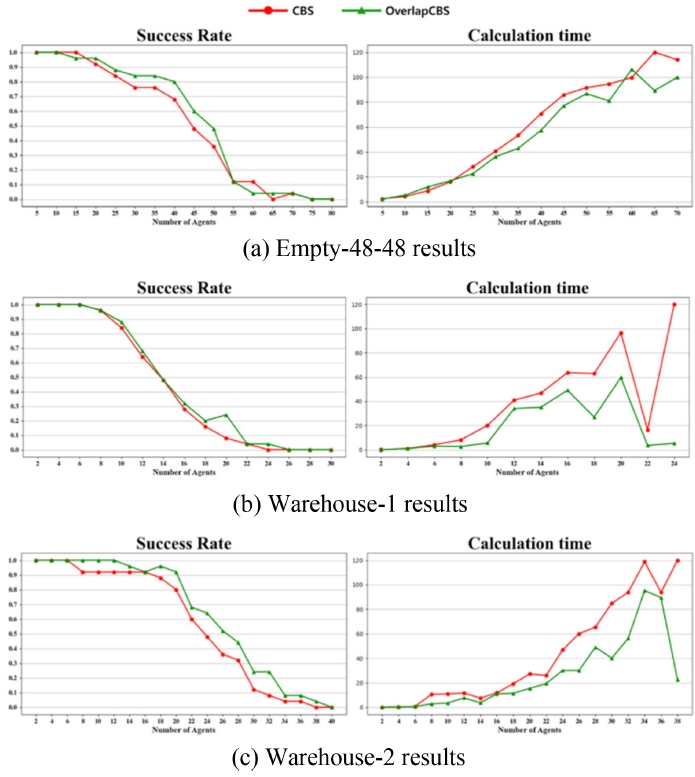
The algorithm’s performance is evaluated using two metrics: Success rate and Calculation time. Success rate represents the percentage of scenarios where pathfinding is completed within 120 seconds. Calculation time is the average time taken for scenarios where either the CBS or OverlapCBS algorithm succeeds, with failed cases assigned 120 seconds.
4.2 Evaluation Results and Analysis
Experimental results clearly show that OverlapCBS significantly outperforms traditional CBS. In the Empty-48-48 map (
Fig. 12(a)), OverlapCBS achieves similar success rates as CBS when fewer than 30 agents are used; however, when the number of agents exceeds 30, OverlapCBS achieves a higher success rate and, with more than 40 agents, it computes solutions approximately 20% faster than CBS. In the Warehouse-1 map (
Fig. 12(b)), which features a single narrow corridor, OverlapCBS exhibits a success rate that is 15% higher than that of CBS with 20 agents and maintains more stable computation times. In the Warehouse-2 map (
Fig. 12(c)), characterized by double corridors, OverlapCBS achieves up to 30% higher success rates and completes computations about 33% faster than CBS in scenarios with 20 or more agents. These numerical improvements confirm that OverlapCBS is a superior solution for Multi-Agent Path Finding in congested environments.
5. Conclusion
The experimental results indicate that the proposed OverlapCBS algorithm outperforms traditional CBS in terms of both success rate and computation time, particularly in environments with narrow corridors and alternative routes. This improvement is primarily attributed to OverlapCBS’s ability to effectively handle overlap conflicts by merging conflicting agents into unified sets. By shifting conflict detection from the individual agent level to the group level, OverlapCBS efficiently addresses chain conflicts and overcomes the limitations of previous methods in congested environments, thereby offering a robust solution for Multi-Agent Path Finding (MAPF) in complex scenarios such as warehouses. However, the algorithm shows relatively less improvement in settings without alternative routes (e.g., single narrow corridors) compared to environments such as Warehouse-2, where alternative paths are available. This limitation likely stems from the current inability to effectively resolve conflicts caused by agents moving in opposite directions under such conditions. Additionally, in open environments where overlap conflicts are infrequent, the potential impact of OverlapCBS is diminished.
To address these challenges, future work should focus on adapting additional conflict types, as defined in prior research [
13], into the OverlapCBS framework. This integration aims to improve the algorithm’s adaptability and performance across a broader range of scenarios, ultimately enhancing its robustness and realworld applicability for MAPF applications.
Fig. 1Logistics companies using robots [
10] (a) Amazon Robotics, (b) Swisslog, (c) Scallong, (d) Grey Orange, and (e) Hitachi (Adapted from Ref. 10 on the basis of OA)
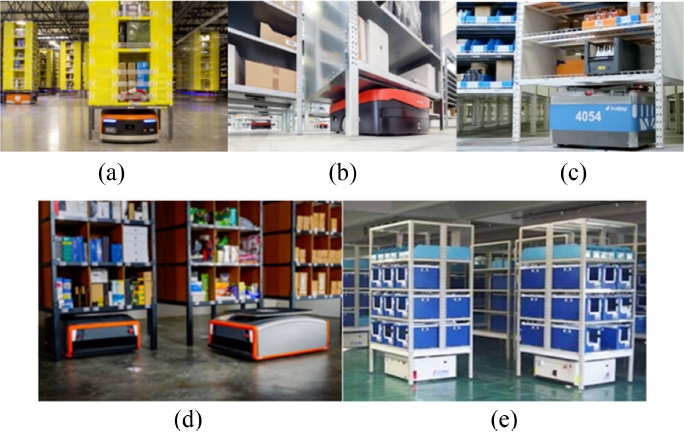
Fig. 2Types of conflicts utilized in this paper. (a) Single Vertex Conflict: A conflict occurs at a single vertex, specifically at vertex B2 and (b) Overlap Conflict: A conflict spans multiple vertices. In this example, the two agents occupy vertex B2 and B3 simultaneously
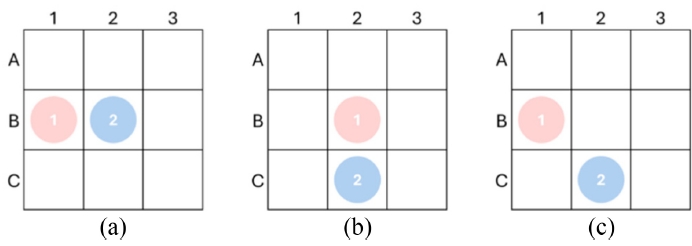
Fig. 3Types of conflicts utilized in this paper. (a) Single Vertex Conflict: A conflict occurs at a single vertex, specifically at vertex B2 and (b) Overlap Conflict: A conflict spans multiple vertices. In this example, the two agents occupy vertex B2 and B3 simultaneously
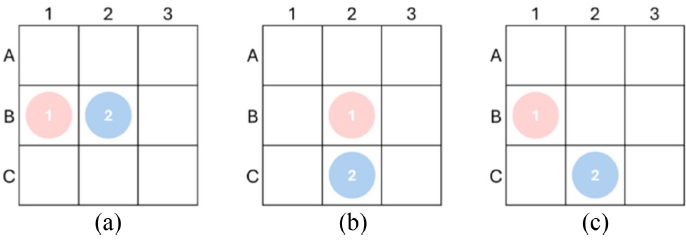
Fig. 4Examples of conflict scenarios between agent sets: (a) Single vertex conflict, (b) Overlap conflict, (c) Edge conflict, and (d) single vertex conflict between a head agent and a middle agent
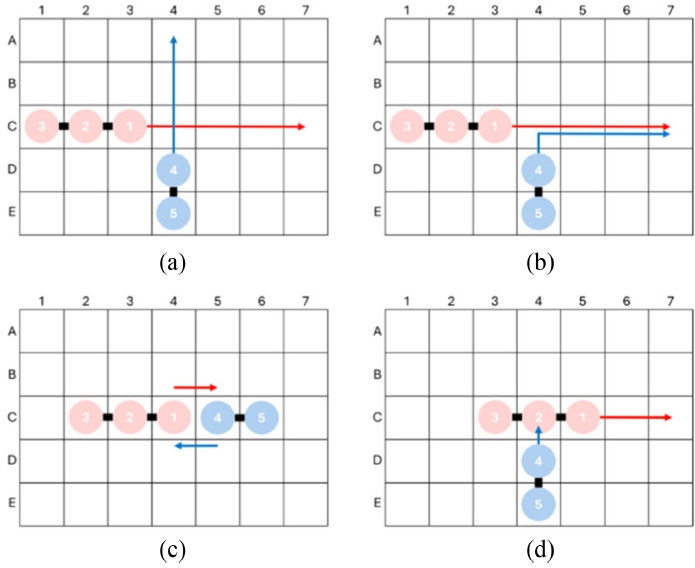
Fig. 5Movement patterns resulting from single vertex conflict resolution. (a) When constraints are applied to agent-set 1 and (b) When constraints are applied to agent-set 2
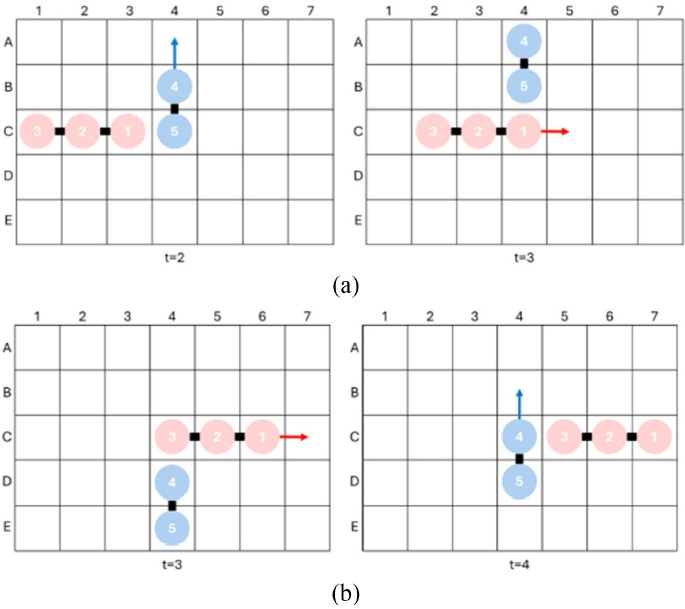
Fig. 6Movement patterns resulting from overlap conflict resolution: (a) Constraints applied to agent-set. (b) Constraints applied to agent-set 2
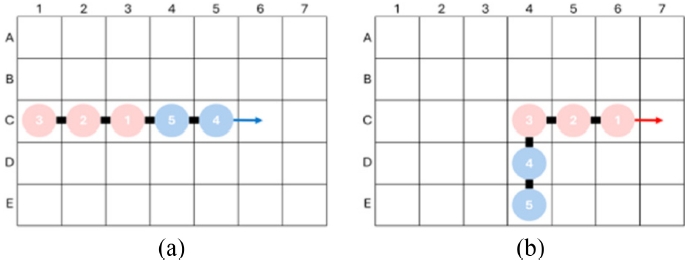
Fig. 7Movement patterns resulting from edge conflict resolution. (a) Constraints on agent-set 1 and (b) Constraints on agent-set 2
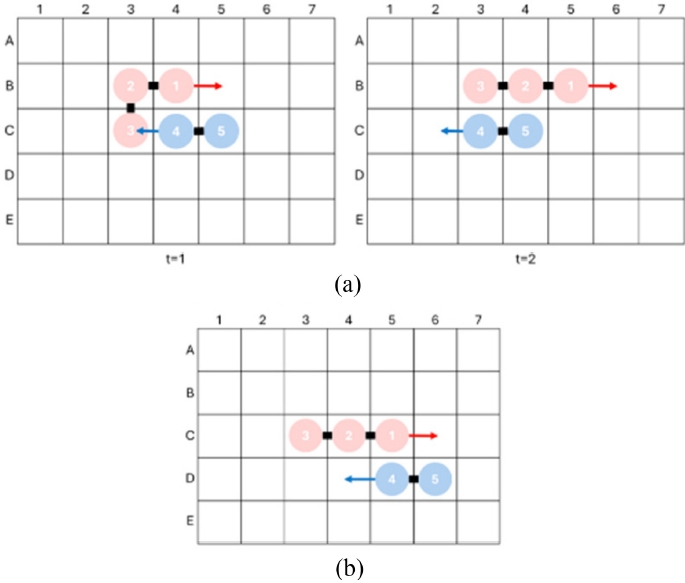
Fig. 8A scenario where applying constraints to agent-set 1 breaks the internal connection of the agent-set 1, making it an invalid solution
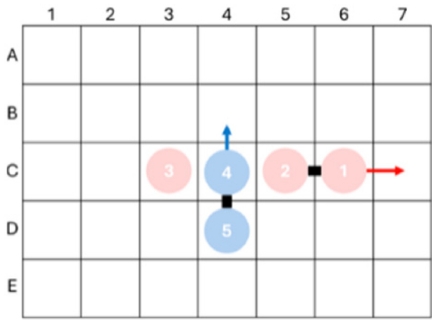
Fig. 9Example scenarios in which agents within the same agent set move towards their respective goal locations
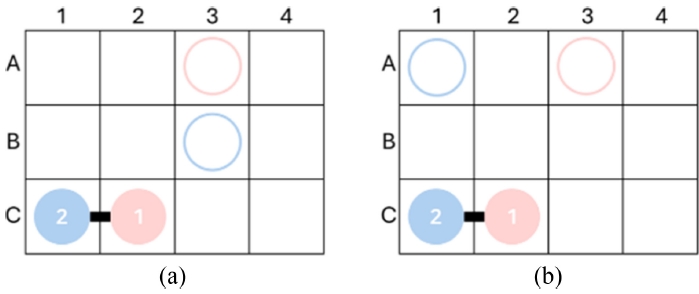
Fig. 10Path planning process for a merged agent set. (a) The head agent plans its path to the goal first, (b) The tail agent plans its path to follow the head agent as closely as possible
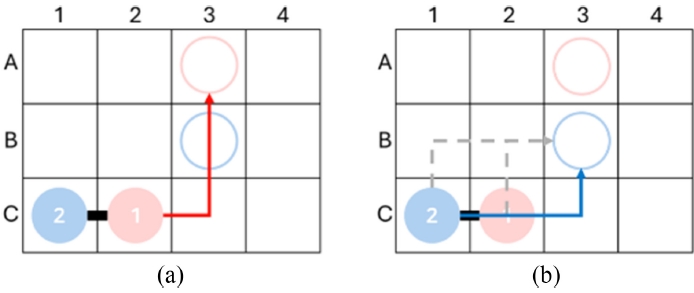
Fig. 11Agent-set splitting due to increased cost for the tail agent
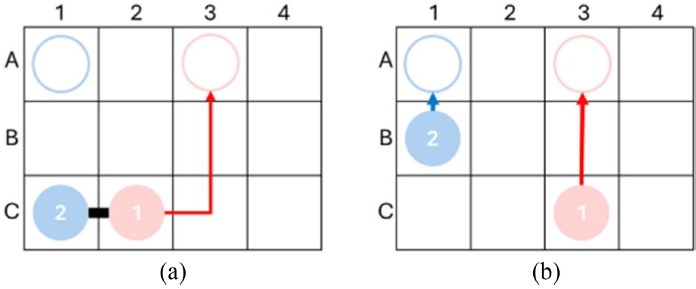
Fig. 12
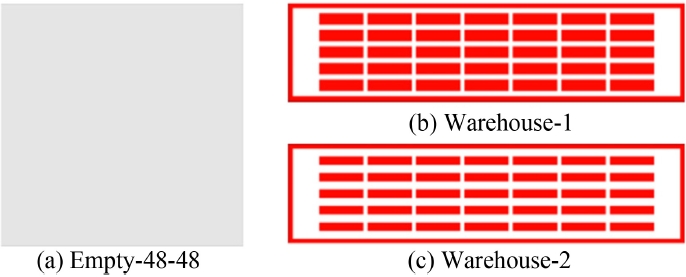
Fig. 13Evaluation results. (a) Empty-48-48, (b) Warehouse-1, and (c) Warehouse-2
Table
|
Algorithm 1: High Level Search of OverlapCBS |
|
Input: MAPF instance |
|
Output: Solution to the MAPF problem |
|
1 |
Root. constraints ← Ø |
|
2 |
Root. solution ← find individual paths by the low level( ); |
|
3 |
Root. cost ← get_cost(Root. solution); |
|
4 |
insert Root to OPEN
|
|
5 |
while OPEN is not empty do
|
|
6 |
P ← best node from OPEN // lowest solution cost |
|
7 |
if P has no conflict then
|
|
8 |
return P. solution //P is the goal |
|
9 |
Cf ← get_first_conflict(P); |
|
10 |
Cl, Cr ← create_constraints_from_conflict(Cf); |
|
11 |
foreach constraints list Ci in {Cl, Cr} do
|
|
12 |
A ← new node; |
|
13 |
foreach agent ai in Ci do |
|
14 |
A. constraints ← P. constraints + Ci {ai}; |
|
15 |
A. solution ← P. solution; |
|
16 |
Update A. solution (invoking low level(ai)); |
|
17 |
A. cost ← get_cost (A. solution); |
|
18 |
if A. cost < ∞ then
|
|
19 |
Insert A to OPEN; |
Table
|
Algorithm 2: get_first_conflict( ) |
|
Input: CT node N
|
|
Output: Conflict |
|
1 |
maxt = find_max_time (N. solution); |
|
2 |
foreach agent ai, aj do
|
|
3 |
t = 1; |
|
4 |
while t < maxt do
|
|
5 |
cvi ← get_current_vertex(ai, t); |
|
6 |
cvj ← get_current_vertex(aj, t); |
|
7 |
nvi ← get_next_vertex(ai, t); |
|
8 |
nvj ← get_next_vertex(aj, t); |
|
9 |
if cvi == cvj and nvi ! = nvj then
|
|
10 |
return {ai, aj, cvi, t, 0}// single vertex conflict |
|
11 |
else if cvi == cvj and nvi = nvj then
|
|
12 |
return {ai, aj, cvi, t, 1}// overlap conflict |
|
13 |
else if cvi == nvj and nvi = cvj then
|
|
14 |
return {ai, aj, cvi, nvi, t}// edge conflict |
|
15 |
t++ |
Table
|
Algorithm 3: Low Level Search Algorithm |
|
Input: start vertex S, goal vertex G, constraints Cons, solution Sol
|
|
Output: Path from S to G or failure |
|
1 |
open ← {(S, 0 + heuristic(S))}; |
|
2 |
closed ← ϕ
|
|
3 |
g[S] ← 0; |
|
4 |
head = -1; |
|
5 |
initialize bh, nh; |
|
6 |
while OPEN is not empty do
|
|
7 |
if bh is not null then
|
|
8 |
current ← bh; |
|
9 |
elseif nh is not null then
|
|
10 |
current ← nh; |
|
11 |
else bh is not null then
|
|
12 |
current ← node in open with the lowest f-score; |
|
13 |
head = -1; |
|
14 |
if current == G then
|
|
15 |
return Path from S to G; |
|
16 |
Remove current from open and add current to closed; |
|
17 |
head = update_head_form_constraint(Cons) |
|
18 |
neighbor_list ← get_neighbors(current) |
|
19 |
foreach state n in neighbor_list do
|
|
20 |
if n in closed then
|
|
21 |
Continue; |
|
22 |
tentative_g ← g[current] + cost(current, n) |
|
23 |
if not in open or tentative_g < g[n] then
|
|
24 |
g[n] ← tentative g; |
|
25 |
f[n] ← g[n] + heu_ristic(n); |
|
26 |
parent[n] ← current; |
|
27 |
if n not in open then
|
|
28 |
Add n to open; |
|
29 |
vertexh = get_current_vertex(head, current.time) |
|
30 |
if n.vertex == vertexh then
|
|
31 |
bh = n
|
|
32 |
else if dist(n.vertex, vertexh) == 1 then
|
|
33 |
nh = n
|
|
34 |
return failure; // No valid path exists |
REFERENCES
- 1. Sharon, G., Stern, R., Felner, A., Sturtevant, N., (2012), Metaagent conflict-based search for optimal multi-agent path finding, Proceedings of the International Symposium on Combinatorial Search, 97-104.
- 2. Pei, M.-S., Liu, C.-L., (2023), Multi-agent path planning based on meta-agent conflict merge search algorithm, Proceedings of the 5th International Academic Exchange Conference on Science and Technology Innovation, 87-90.
- 3. Ma, H., Harabor, D., Stuckey, P. J., Li, J., Koenig, S., (2019), Searching with consistent prioritization for multi-agent path finding, Proceedings of the AAAI Conference on Artificial Intelligence, 7643-7650.
- 4. Kasaura, K., Nishimura, M., Yonetani, R., (2022), Prioritized safe interval path planning for multi-agent pathfinding with continuous time on 2D roadmaps, IEEE Robotics and Automation Letters, 7(4), 10494-10501.
- 5. Okumura, K., Machida, M., Défago, X., Tamura, Y., (2022), Priority inheritance with backtracking for iterative multi-agent path finding, Artificial Intelligence, 310, 103752.
- 6. Sharon, G., Stern, R., Felner, A., Sturtevant, N. R., (2015), Conflictbased search for optimal multi-agent pathfinding, Artificial Intelligence, 219, 40-66.
- 7. Andreychuk, A., Yakovlev, K., Surynek, P., Atzmon, D., Stern, R., (2022), Multi-agent pathfinding with continuous time, Artificial Intelligence, 305, 103662.
- 8. Felner, A., Li, J., Boyarski, E., Ma, H., Cohen, L., Kumar, T. S., Koenig, S., (2018), Adding heuristics to conflict-based search for multi-agent path finding, Proceedings of the International Conference on Automated Planning and Scheduling, 83-87.
- 9. Li, J., Felner, A., Boyarski, E., Ma, H., Koenig, S., (2019), Improved heuristics for multi-agent path finding with conflict-based search, IJCAI, 442-449.
- 10. Xie, L., Li, H., Thieme, N., (2018), From simulation to real-world robotic mobile fulfillment systems, arXiv preprint arXiv:1810.03643.
- 11. Li, J., Harabor, D., Stuckey, P. J., Ma, H., Koenig, S., (2019), Symmetry-breaking constraints for grid-based multi-agent path finding, Proceedings of the AAAI Conference on Artificial Intelligence, 6087-6095.
- 12. Li, J., Harabor, D., Stuckey, P. J., Ma, H., Gange, G., Koenig, S., (2021), Pairwise symmetry reasoning for multi-agent path finding search, Artificial Intelligence, 301, 103574.
- 13. Li, J., Harabor, D., Stuckey, P. J., Felner, A., Ma, H., Koenig, S., (2019), Disjoint splitting for multi-agent path finding with conflictbased search, Proceedings of the International Conference on Automated Planning and Scheduling, 279-283.
- 14. Boyarski, E., Felner, A., Sharon, G., Stern, R., (2015), Don't split, try to work it out: Bypassing conflicts in multi-agent pathfinding, Proceedings of the International Conference on Automated Planning and Scheduling, 47-51.
- 15. Li, J., Ruml, W., Koenig, S., (2021), Eecbs: A bounded-suboptimal search for multi-agent path finding, Proceedings of the AAAI Conference on Artificial Intelligence, 12353-12362.
- 16. Salzman, O., Stern, R., (2020), Research challenges and opportunities in multi-agent path finding and multi-agent pickup and delivery problems, Proceedings of the 19th International Conference on Autonomous Agents and MultiAgent Systems, 1711-1715.
- 17. Stern, R., Sturtevant, N., Felner, A., Koenig, S., Ma, H., Walker, T., Li, J., Atzmon, D., Cohen, L., Kumar, T., (2019), Multi-agent pathfinding: Definitions, variants, and benchmarks, Proceedings of the International Symposium on Combinatorial Search, 151-158.
Biography
- SeoHyun Yoo
M.Sc. candidate in the Department of Interdisciplinary Robot Engineering Systems, Hanyang University. Her research interest includes multi-robot systems, path planning for multiple mobile robots or agents, task and motion planning.
- SeongTaek Im
M.Sc. candidate in the Department of Interdisciplinary Robot Engineering Systems, Hanyang University. Her research interest includes multi-robot systems, path planning for multiple mobile robots or agents, task and motion planning.
- HyoJae Kang
Ph.D. candidate in the Department of Interdisciplinary Robot Engineering Systems, Hanyang University. His research interest includes mechanism design, control architectures and programming, gripper and other end-effectors, entertainment robotics.
- ChanHui Jung
Researcher in the Department of Robot Engineering, Hanyang University. His research interest includes precision engineering. multirobot systems, path planning for multiple mobile robots or agents, task and motion planning.
- Daehee Han
M.Sc. candidate in the Department of Interdisciplinary Robot Engineering Systems, Hanyang University. His research interest motion and path planning, integrated planning and control, AI-enabled robotics, reinforcement learning.
- Min-Sung Kang
Associate professor in the School of Smart Convergence Engineering, Hanyang University. His research interest includes mechanism design, planning, control architectures and programming, embedded systems.