ABSTRACT
This study introduces a novel adjustable fastening mechanism for wearable robots, aimed at alleviating user discomfort associated with traditional fixed attachment methods. By utilizing the unique scissoring effect of braided sleeves, we demonstrated that axial manipulation can effectively translate into radial size control, allowing for precise regulation of fastening force. To address the size limitations of commercial braided sleeves, we developed a large-area fastening structure by combining multiple braided sleeve sheets. Additionally, we incorporated a wire tendon system to enable active operation in both Daily Mode (fastening-release) and Exercise Mode (fastening-tightening). Experimental results on an anthropomorphic model revealed that this adjustable fastening structure offers variable fastening forces, achieving a 4.8-fold difference between the exercise and daily modes. This research presents a new approach by leveraging the Poisson's ratio properties of braided sleeves for dynamic fastening, tackling fabrication challenges for large-area structures, and improving user comfort and compliance in wearable robot applications
-
KEYWORDS: Wearable robot, Braided sleeve, Poisson's ratio, Scissoring effect, Adjustable fastening
-
KEYWORDS: 웨어러블 로봇, 브레이드 슬리브, 포아송 비, 가위 효과, 가변 결착
NOMENCLATURE
Change in Vertical Length
Change in Horizontal Length
1. 서론
기존 웨어러블 로봇은 허리, 종아리, 허벅지, 발목 등 다양한 신체 부위에 부착되어 사용자의 근력보조[
1-
4], 하지마비 장애인의 자립 보행 및 재활 훈련 지원등 일상생활의 운동 능력 향상에 중요한 역할을 한다[
5]. 일반적인 웨어러블 로봇은 액추에이터(Actuator)의 동력을 인체에 전달하기 위한 연결 방안으로서 결착 구조를 이용하며, 이러한 결착 구조는 보통 벨크로[
6] 혹은 사전에 길이가 조절된 버클[
7]을 활용하여 착용 내내 고정 된 결착력을 유지한다. 또한 어깨와 몸에 걸치는 하네스 타입[
8,
9]도 널리 사용된다. 이러한 방식은 강한 구동력 전달을 위해 높은 결착력이 요구되지만, 장시간 착용 시 혈액 순환 저해, 피부 쓸림 등 심각한 사용자 불편을 초래하며 전반적인 착용감을 저하 시킨다. 결과적으로 이러한 고정 결착 방식은 사용자 피로도를 가중시키고, 장시간 사용 시 로봇에 대한 순응도를 저해하는 주요 요인이다.
최근에는 결착력을 가변하려는 다양한 연구가 수행되었다. 공압형 웨어러블 로봇에서, 공압형 근육 자체와 결착 구조가 일체형으로 설계된 구조는 공압이 주입되면 액추에이터의 운동과 결착을 동시에 수행하며 높은 적응성을 제공한다. 하지만, 공압 특성상 외부에서 공압 발생 장치가 필수적인 한계가 있다[
10]. 다른 예로, 와이어 텐던 구조를 적용하고 모터 구동을 통해 사용자의 특정 움직임이 필요한 때 결착력을 능동적으로 조절할 수 있는 메커니즘이 개발되었다[
11]. 하지만 능동 앵커 메커니즘은 모터 및 와이어 텐던을 지지하는 강성 구조물 탑재가 필수적이며, 이는 전체 시스템 무게 증가 및 착용자의 기동성이 저하된다. 결착 구조의 결착력을 가변하기 위해서는 복잡한 구조가 필요하고 제한적인 유연성으로 인해 광범위한 적용에 한계가 있었다. 따라서, 웨어러블 로봇이 실제로 힘을 전달하고 작동할 때에 높은 결착력을 제공하고, 그 외 평상시에는 압박력을 낮춰 통풍과 사용자 편의성을 극대화할 수 있는 새로운 결착 메커니즘의 개발이 필요하다.
이러한 요구를 충족할 수 있는 유망한 소재 중 하나가 바로 브레이드 슬리브(Braided Sleeve)이다. 브레이드 슬리브는 케이블 및 호스 등을 보호하고 관리하는 데 사용되는 케이블 부자재이며, 여러 가닥의 가는 섬유나 금속 와이어를 일정한 패턴으로 교차시켜 튜브 형태로 편조한 직물이다. 특히, 브레이드 슬리브는 뛰어난 신축성과 형태 적응성을 가지고 있어, 좁고 복잡한 공간이나 급격하게 구부러지는 경로에도 케이블을 쉽고 자연스럽게 따라가며 설치할 수 있다. 이러한 독특한 기계적 특성 덕분에 브레이드 슬리브는 상업적인 사용처 외에 오래전부터 공압 인공 근육(Pneumatic Artificial Muscles, PAM)의 핵심 소재로 연구되어 왔다[
12]. PAM은 내부 공기 주머니가 팽창시, 이를 감싸는 브레이드 슬리브의 기하학적 구조가 반경 방향 팽창을 길이 방향 수축으로 변환하여 근육과 유사한 움직임을 구현한다. 이 슬리브의 꼬임 각도에 따라 수축력과 수축률이 결정되며, 가볍고 탄력적이면서도 강력한 힘을 발휘할 수 있는 특징을 지닌다.
언급된 브레이드 슬리브의 고유한 기하학적 특성, 특히 독특한 포아송비 변화 특성을 활용하여, 본 연구는 기존 웨어러블 로봇 결착 구조의 고정된 착용 압박과 동적(Dynamic) 결착력 조절 한계를 극복하는 새로운 가변 결착 메커니즘을 제안한다. 이 메커니즘은 브레이드 슬리브에 와이어 텐던 기반의 온-오프 결착 모드를 결합하여 필요에 따라 결착력을 능동적으로 조절하도록 설계되었다. 또한, 브레이드 슬리브는 자유롭게 변형되어 착용한 신체 형상에 밀착함으로써 착용감을 극대화한다. 이러한 구조는 일상생활에서는 일상모드(결착 이완)로 착용 부위에 불필요한 부하를 최소화하고, 웨어러블 로봇의 보조가 필요할 때 운동모드(결착 강화)로 전환하여 결착력을 안정적으로 확보하는 장점을 지닌다. 본 연구는 제안된 가변 결착 구조의 효용성과 웨어러블 로봇 결착 시스템으로서 잠재적 적용 가능성을 검증하고자 한다. 연구 결과는 사용자에게 최적화된 착용감과 안정성을 동시에 제공하는 웨어러블 로봇의 결착 구조 메커니즘 개발에 이론적 기반을 제공할 것으로 기대된다.
2. 브레이드 슬리브 기반 결착 구조의 기초 연구
2.1 브레이드 슬리브 구조의 특성
브레이드 슬리브는 와이어 로프와 마찬가지로 여러 가닥의 와이어를 편조하여 제작되지만, 그 구조와 목적에서 큰 차이를 보인다. 와이어 로프는 여러 가닥의 와이어를 작은 묶음인 스트랜드(Strand)로 먼저 꼬아 모으고, 이 스트랜드들을 다시 중심 코어 주위로 꼬아서 최종 로프를 완성한다. 이러한 다단계 구조는 주로 높은 하중 지지를 목적으로 한다. 반면에, 브레이드 슬리브는 얇은 와이어들이 스트랜드 없이 독립적인 편조(Braiding) 방식으로 직접 엮여 제작된다. 이처럼 스트랜드 구조가 없이 각 와이어가 독립적으로 편조 패턴을 구성하는 브레이드 슬리브의 독특한 구조는 유연성과 형태 적응성을 제공하며, 웨어러블 로봇 적용 시 인체의 비정형 형상에 밀착하여 착용감 극대화에 유리하다.
이러한 브레이드 슬리브의 특성은 특히 브레이딩 각도(Braiding Angle)에 의해 크게 좌우된다. 브레이딩 각도는 튜브의 축 방향과 개별 와이어 가닥이 이루는 각도를 의미한다. 브레이드 슬리브 제작 시 소선의 지름과 재질은 마찰, 내마모성 등의 물리적 특성을 결정하는 직관적인 설계 변수이다. 하지만 브레이딩 각도는 슬리브의 인장 강도, 강성, 포아송비와 같은 여러 기계적 특성에 밀접하게 연관된다. 작은 브레이딩 각도(20-40o)를 가질 경우, 와이어 가닥들이 튜브의 축 방향에 더 가깝게 정렬된다. 이는 슬리브를 길이 방향으로 당겼을 때 높은 인장 강도와 강성을 부여하고, 늘어나거나 변형되는 정도가 작게 나타난다. 그러나 축 방향으로 견고하게 배열되어 있기 때문에 슬리브를 구부리거나 비틀 때 유연성이나 신축성은 상대적으로 떨어진다. 반대로 큰 브레이딩 각도(50-70o)를 가질 경우, 와이어 가닥들이 튜브의 축 방향에 대해 더 높은 각도로 배열된다. 이 경우, 슬리브를 길이 방향으로 당겼을 때 낮은 인장 강도를 가지며 쉽게 늘어날 수 있다. 하지만 슬리브를 구부리거나 비틀때 매우 유연하게 움직이며 높은 신축성을 가지므로, 굴곡이나 움직임이 많은 환경에 쉽게 적응할 수 있는 특징을 나타낸다.
이 브레이딩 각도는 브레이드 슬리브의 포아송비(Poisson's Ratio)에도 결정적인 영향을 미친다. 포아송비는 재료가 한 방향으로 변형될 때 다른 방향으로 얼마나 변형되는지를 나타내는 값으로, 일반적인 재료는 인장 시 수축하고 압축 시 팽창하는 양의 값을 갖는다. 이와 달리 브레이드 슬리브는 브레이딩 각도에 따라 비선형적인 포아송비 특성을 보인다. 각도가 0o에 가까울수록 슬리브를 축 방향으로 압축할 때 와이어 가닥이 측면으로 벌어지며 반경 방향으로 크게 팽창한다. 이때 포아송비는 극단적으로 높은 값(0.5 이상)을 가진다.
이러한 극단적인 포아송비 특성은 외부 제어를 통해 슬리브의 직경을 효과적으로 조절하여, 웨어러블 로봇의 결착력을 능동적으로 제어하는 데 활용될 수 있고, 착용자의 신체에 대한 능동적인 밀착력 조절을 가능하게 하여, 안정적인 착용감과 효율적인 힘 전달을 동시에 확보할 수 있다.
2.2 소형 결착 구조의 개념 및 기초검증
브레이드 슬리브 팽창 운동의 능동 제어 가능성을 검증하기 위해, 소형 브레이드 슬리브를 활용한 결착 구조의 기초 검증을 수행하였다. 사용된 브레이드 슬리브의 재질 및 매개변수는
Table 1, 사진과 브레이딩 앵글은
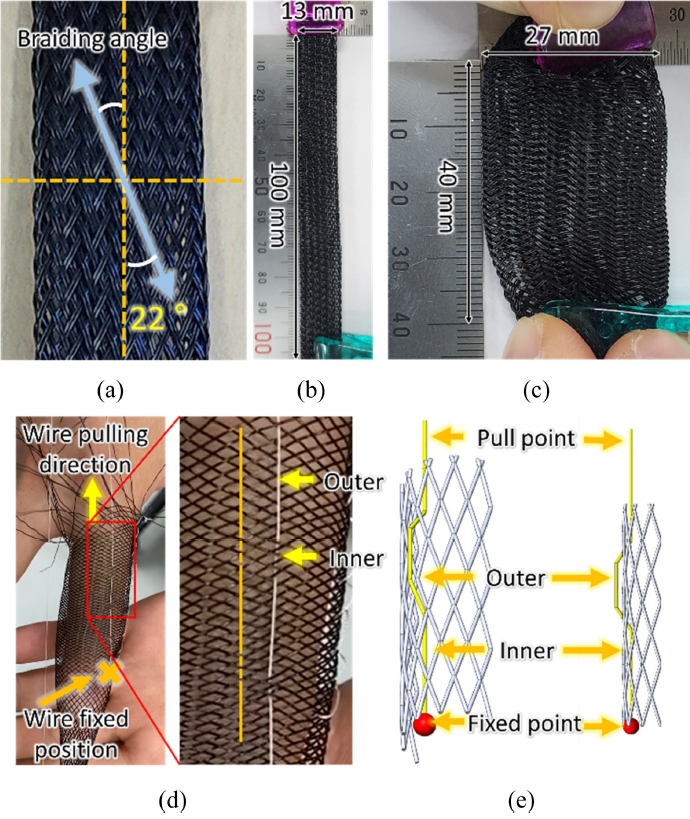
Fig. 1(a)에 제시되어 있다.
브레이드 슬리브는 개별 와이어가 독립적으로 교차하는 특수 구조로 인해 축 방향 힘이 가해질 경우, 와이어 간의 가위 효과(Scissoring Effect)가 발생하며 슬리브 폭이 변화가 극단적으로 나타난다.
Figs. 1(b)와
1(c)에서 길이 방향 변형률(
ε)은 초기 길이(
L0) 100 mm가 40 mm로 감소함에 따라 식(2)에 -0.6으로 계산되었으며, 폭 방향 변형률(
ε')은 13에서 27 mm로 증가함에 따라 식(3)에 의해 1.077로 계산되었다.
여기서 산출된 지표는 슬리브를 하나의 이방성 구조체로 간주한 구조적 포아송비(Structural Poisson’s Ratio) 개념이며, 슬리브를 구성하는 개별 재료의 고유적인 포아송비와는 구분되는 개념이다. 그 결과 식(2) 및 식(3)에 따른 길이 방향 변형률에 비해 매우 큰 폭 방향 변형률이 유도됨을 확인하였다. 식(4)로 계산된 포아송비는 1.795로, 이는 축 방향 변위가 가위효과를 통해 구조적인 폭 방향 변위 발생을 유도할 수 있음을 나타낸다. 이를 통해 27 mm 이내의 결착에 사용할 수 있으며, 손가락의 결착에 사용하기 충분한 폭 변화를 제공함을 의미한다.
결착 구조의 탈부착 용이성 확보를 위해 와이어 텐던 구조를 활용하여 브레이드 슬리브와의 직접적인 접촉 없이 와이어 텐던의 장력으로 슬리브의 수축 및 팽창을 조절하는 구조를
Fig. 1(d)와 같이 고안했다. 브레이드 슬리브 편조 와이어의 교차점(Wire Fixed Position)에 구동 와이어를 고정하여 인장력 전달의 기준점으로 설정하였다. 인장력 전달의 효율성을 높이기 위해, 와이어는 슬리브의 원통 내외부를 따라 지그재그 경로로 배치되어, Fixed Point에 고정된 와이어를 Pull Point 에서 당기면, 가위 효과 메커니즘에 의해 브레이드 슬리브의 길이 방향 수축이 폭 방향 팽창으로 변환된다.
손가락이 삽입되는 개구부는 고정되어 있으며, 와이어를 당기면 브레이드 슬리브가 축 방향으로 수축되고 폭 방향으로 팽창하여 일상모드(결착이 이완된 상태)로 전환 된다. 반대로 와이어를 풀어서 브레이드 슬리브가 수축되어 운동모드(결착을 강화하는 상태)로 변환된다.
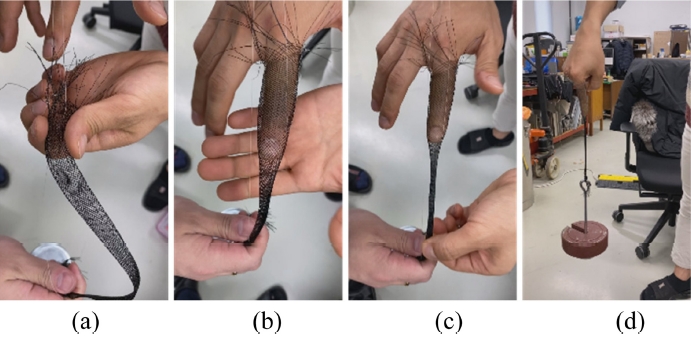
Fig. 2(a)는 제작된 소형 결착 구조의 개구부를 고정하고 와이어 텐던을 당겨 폭을 확장된 초기 상태를 보여준다.
Figs. 2(b)와 같이 확장된 폭으로 손가락의 원활한 삽입이 가능하였으며,
2(c)에서 슬리브의 길이 방향으로 약한 장력을 가할 경우 손가락 주변의 슬리브가 폭 방향으로 수축되어 피부에 단단히 밀착됨을 확인했다.
Fig. 2(d)는 손가락에 결착된 구조가 길이 방향으로 하중을 지지할 때 미끄러짐 없이 더욱 단단히 결착되어, 2 kg 무게의 추를 안정적으로 지지할 수 있음을 보여준다.
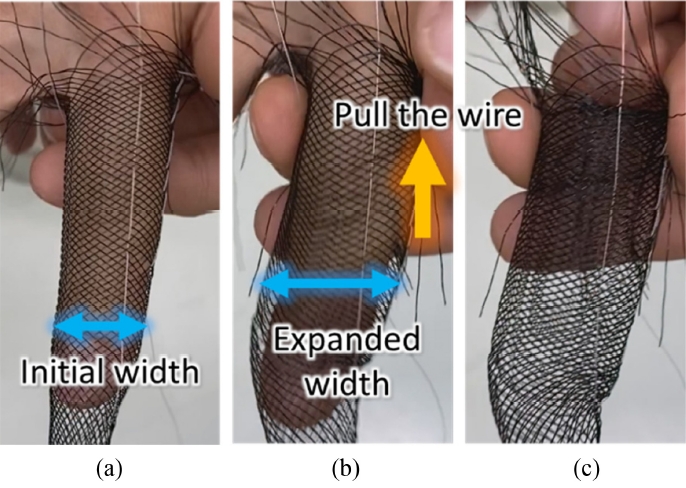
Fig. 3은 소형 결착 구조의 탈착 과정을 보여준다.
Figs. 3(a)는 손가락에 밀착되어 있는 슬리브의 운동모드 상태를,
3(b)는 모드 변환 와이어 텐던을 당겨 슬리브가 폭 방향으로 확장된 상태를 보여준다.
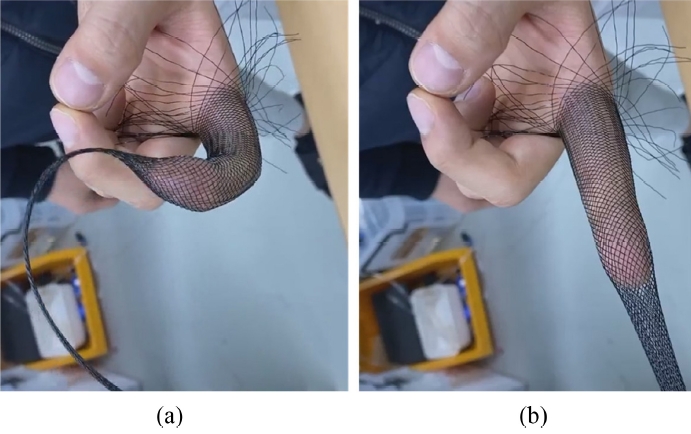
Fig. 3(c)에서는 확장된 슬리브로 인해 손가락이 쉽게 빠져나오는 것을 확인할 수 있다. 위 결착 구조는 부착 및 탈착 과정의 용이성뿐만 아니라, 브레이드 슬리브 자체의 유연성으로 인해
Fig. 4와 같이 착용 후 손가락의 굽힘을 원활히 수행하여 관절 운동을 방해 하지 않는 것을 확인했다.
3. 대면적 가변 결착 구조의 설계, 제작 및 성능 평가
3.1 대면적 가변 결착 구조의 설계 및 제작
웨어러블 로봇이 다리, 허리, 팔 등 다양한 인체 부위에 장착되기 위해서는 각 인체 부위의 넓은 둘레 범위를 수용할 수 있어야 한다. 예를 들어, 팔꿈치부터 허벅지까지 약 200에서 600 mm, 허리의 둘레는 800 mm 이상 이다. 그러나 기초 검증에 사용된 소형 브레이드 슬리브 또는 현재 상업적으로 생산되는 가장 큰 단일 브레이드 슬리브는 운동모드 시 최대 80 mm, 일상모드 시 최대 150 mm 둘레를 가지며, 이보다 큰 인체 부위에는 적용이 제한적이다. 보다 대형의 단일 구조 브레이드 슬리브를 제작하기 위해서는 브레이드 슬리브 제작 장비의 크기가 급격히 커지며, 이는 대면적 결착 구조의 제작에 공정상의 어려움을 야기한다.
이러한 공정상의 제약을 극복하고 보다 넓은 인체 부위에 결착 구조를 적용하기 위해, 본 연구에서는 브레이드 슬리브를 시트 형태로 재단하고 복수의 시트를 겹쳐 더 큰 원통의 슬리브를 제작하는 방식을 고안하여 제작 가능한 결착 구조의 직경 한계를 확장하고자 했다.
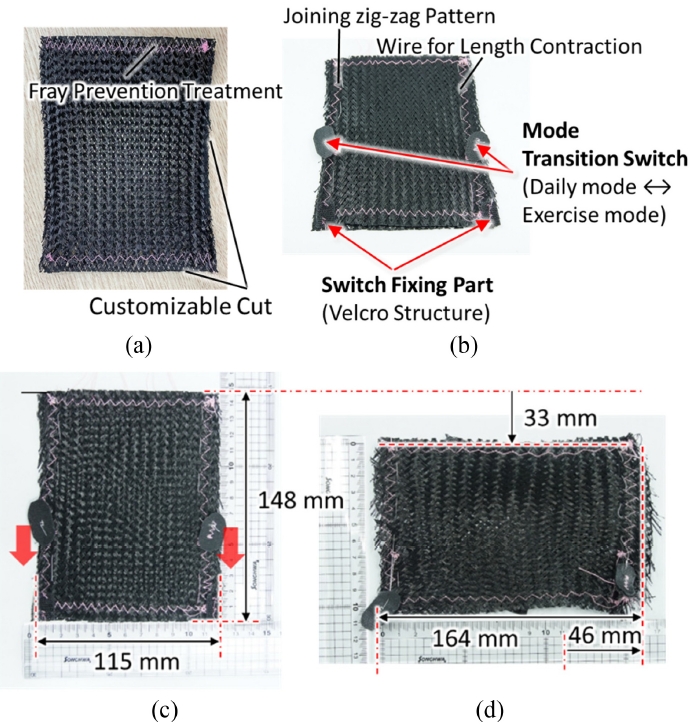
Fig. 5(a)에 나타난 바와 같이, 브레이드 슬리브 시트는 가로 120 mm, 세로 150 mm 크기로 재단되었으며, 절단 후에도 길이 방향 인장에 따른 폭 방향 수축 특성이 유지되었다. 그러나 브레이드 슬리브는 각 와이어가 고정되어 있는 부분이 존재하지 않아, 개별 와이어의 올 풀림이 쉽게 발생한다. 이를 방지하기 위해 각 시트의 절단면을 지그재그 방식으로 재봉했다. 이 재봉 방법은 일반적인 일자 박음질에 비해 브레이드 슬리브의 길이 방향 인장 및 폭 방향 수축 특성을 방해하지 않으면서 테두리의 올 풀림을 효과적으로 방지하기 위해 사용되었다.
Fig. 5(b)는 테두리에 마감 처리된 동일한 개별 브레이드 슬리브 시트 2장을 겹치고 길이 방향으로 좌우를 지그재그 방식으로 다시 재봉하여 원통 형상으로 구현된 모습을 보여준다. 여기에 결착 구조의 부착 및 탈착 편의성을 위해 와이어 텐던 구조를 적용했다. 와이어의 말단부에는 벨크로를 부착하여, 벨크로의 위치 조정을 통해 결착 구조의 두 구동 모드(일상모드 및 운동모드)를 전환하도록 설계했다.
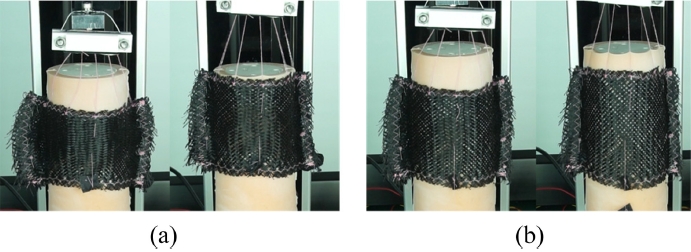
Fig. 5(c)의 운동모드는 결착 구조가 신체에 밀착하여 인공 근육 장착시 근력 전달 및 운동 보조 역할을 수행하며 힘을 전달할 수 있는 모드이다.
Fig. 5(d)의 일상모드는 결착 구조가 폭 방향으로 늘어나 신체에 밀착하지 않아 편안한 착용감을 제공하며, 일상생활에서 보조가 필요하지 않을 때 사용하는 모드이다. 일상모드로 전환은 모드전환 스위치를
Fig. 5(c)와 같이 빨간색 화살표 방향으로 내려 전환 된다. 대면적 결착 구조의 재질 및 제작 매개변수는
Table 2에 정리 되어있다.
3.2 대면적 가변 결착 구조의 성능 평가
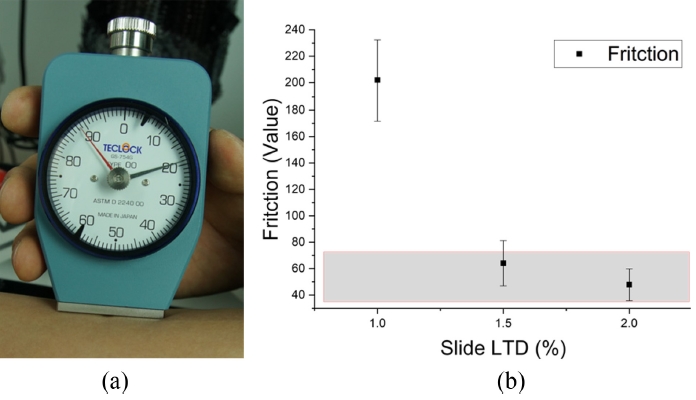
대면적 가변 결착 구조의 성능을 평가하기 위해 인체 팔 부위를 모사한 구조를 제작했다. 이 구조는 팔의 평균 지름을 고려하여 250에서 280 mm 둘레를 가지는 완만한 원뿔형 기둥으로 제작되었으며, 인체 피부 경도와 유사한 물성을 구현하기 위해 폴리머(Ecoflex 0020, Smooth-on)를 사용하였다. 실제 인체 피부 및 근육의 탄성계수와 폴리머의 탄성계수는 다소 차이가 있으나, 본 연구는 마찰 기반의 결착 메커니즘의 성능 검증에 초점을 맞추었기에 표면 경도 및 마찰력이라는 핵심 물성치를 인체 피부와 가장 유사하게 모사하는 것을 목표 했다. 인체 피부의 경도를 경도 측정기(GS-754G, TECLOCK)로 측정한 결과 Shore 00 20으로 나타났으며, 이는 Ecoflex 0020의 경도와 일치한다. 또한, 인체 피부의 마찰력 지수를 마찰력 측정기(FR700, Epigem)로 측정했을 때 35-70 범위였으며, Ecoflex 0020에 Slide STD 2%의 첨가제를 사용하여 제작한 인체 모사 구조의 마찰력 지수가 35-60로 측정되어 실제 인체 피부의 마찰력 특성을 가장 유사하게 재현했다.
결착 구조의 성능을 다양한 마찰 환경에서 평가하고자, 인체 모사 구조의 표면에 라텍스 시트를 덮은 저마찰 환경과 및 폴리머 표면의 고마찰 상태로 구분하여 실험을 진행했다.
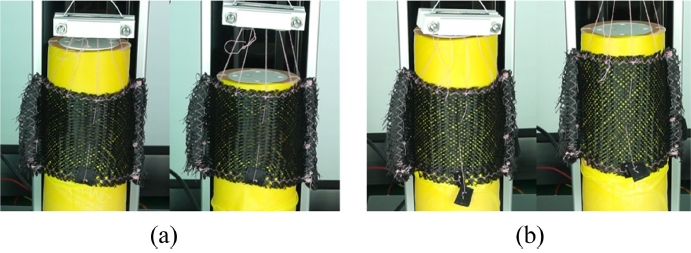
Fig. 7의 인체 모사 구조는 1축 인장 시험기(MCT-2150, AND)의 베이스에 볼트로 고정하고, 그 둘레에 가변 결착 구조를 장착했다. 결착 구조에 연결된 와이어는 원통의 한쪽 측면에만 연결되었으며, 반대편 와이어는 인장시험기의 로드셀에 연결하였다. 실험은 와이어 텐던을 편측에만 연결하는 비대칭 조건으로 구성되었고, 이는 인체 근육의 편측 구동 구조 힘 전달 방향을 모사한 것이다. 편측 결착 조건은 구조체에 힘이 가장 불균형하게 작용하는 가장 불리한 조건이다. 따라서 본 논문에서 제시된 성능은 가혹한 조건하에서 검증되었다.
인장 실험 결과, 일상 모드에서는 결착 구조가 인체 모사 구조로부터 쉽게 벗겨져 인장 방향 변형이 최소화되고, 폭 방향 수축 변위도 적었다. 이와 달리 운동 모드에서는 와이어를 상부로 당길 때 결착 구조 하단은 움직임이 거의 없고, 인장 변형을 통해 폭이 감소하면서 인체 모사 구조를 강하게 압박하여 안정적 지지를 구현함을 확인했다. 이러한 특성 차이는 표면 마찰에 기인한다. 저마찰 환경(
Fig. 7)에서 결착 지지력 측정 결과(
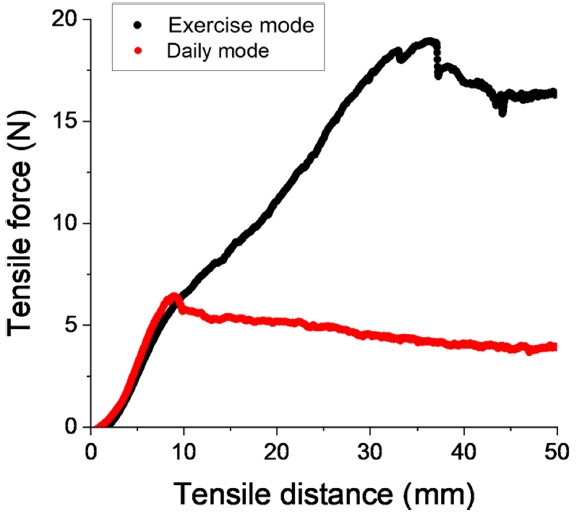
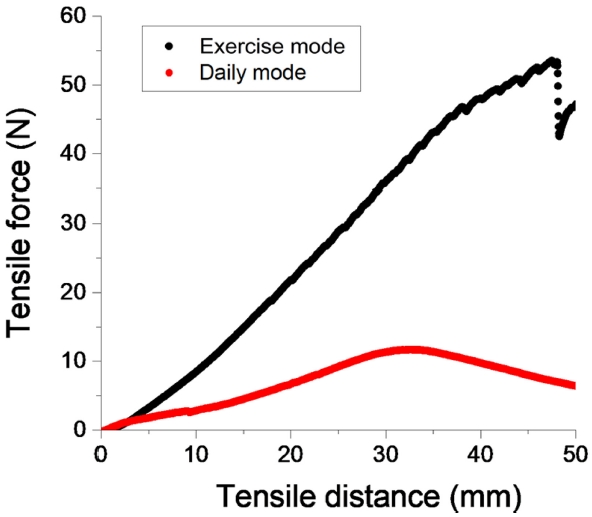
Fig. 8), 일상 모드는 평균 8 N(표준편차 1.36 N)인 반면, 운동 모드는 평균 16.5 N(표준편차 2.16 N)으로 측정되어, 약 2.1배의 지지력 차이를 보였다. 고마찰 환경(
Fig. 9)에서는 지지력 측정 결과(
Fig 10), 일상 모드에서 평균 11.2 N(표준편차 0.45 N), 운동모드가 53.5N으로 측정되어 약 4.8배의 지지력 차이가 나타났다. 제시된 평균값과 표준편차는 확보된 반복 실험 데이터를 활용하여 통계적 신뢰성을 보강한 결과이다. 고마찰 환경 운동 모드 최종 실험 시 로드셀과 결착 구조 간의 연결부가 파손되어 추가적인 반복 실험 데이터를 취득하지는 못했으나, 연결부가 정상이었다면 53.5 N 보다 더욱 높은 지지력이 측정되었을 것으로 예상한다.
Figs. 8과
10에서, 운동모드의 힘 곡선은 급격한 비선형 증가를 보인다. 이는 구조적 강성 증가와 마찰 기반 결착력 극대화라는 두 가지 핵심 요인의 결합에 기인한다. 첫째, 인장 거리가 늘어나 브레이딩 각도 감소하며, 이는 슬리브의 축 방향 강성을 비선형적으로 급격히 증가시키는 구조적 강성 증가(Structural Stiffening)를 유발한다. 둘째, 이 강성 증가가 폭 수축을 심화시켜 결착력을 증대시키고, 결과적으로 지지력이 급격히 상승한다. 이러한 비선형 변화의 결합이 본 구조의 하중 지지 능력을 극대화하는 핵심이다.
그러나, 고마찰 환경의 일상 모드(
Fig. 10)에서 슬라이딩 중에도 인장력이 부분적으로 증가하는 현상이 관찰되었다. 이는 고마찰 환경에서 브레이드 슬리브의 폭 수축에 의한 압착이 강한 마찰 결합을 유발하기 때문이다. 특히, 낮은 초기 결착력에도 불구하고 인장 거리가 증가에 따라 발생하는 결착 구조의 잔여적인 미세 변형과 마찰 상호작용이 지속되어, 부분적인 인장력 증가를 유도한다. 이 결과는 결착 대상의 마찰 특성이 최대 결착력의 크기와 거동 양상에 큰 영향을 미치는 주요 변수이며, 향후 결착 메커니즘 설계 시 마찰 환경의 변화를 고려하는 것이 필수적이다.
4. 결론
본 연구에서는 웨어러블 로봇의 고정 결착력 한계 및 사용자 불편을 해소하고자 브레이드 슬리브 기반의 가변 결착 메커니즘을 제안하고 검증을 수행했다.
연구 결과 브레이드 슬리브의 고유한 가위 효과를 활용하여, 인장력이 폭 방향 수축으로 전환되어 효과적인 결착력 전달이 가능함을 입증하였다. 특히, 상용 브레이드 슬리브의 지름 한계를 극복하고자 다수의 시트를 재단 및 결합하여 대면적 결착 구조를 성공적으로 구현했다. 또한, 와이어 텐던 구조를 적용함으로써 일상 모드(결착 이완)와 운동 모드(결착 강화)간의 능동적 모드 전환 기능을 추가했다. 기존의 단단한 벨크로나 버클 방식과 달리, 가변 결착 구조는 와이어 텐던 구조를 통해 유연하면서 결착력을 실시간으로 가변 제어할 수 있는 기능적 차별성을 갖는다. 이러한 연구 결과는 웨어러블 로봇 결착 기술에 사용자의 착용감을 개선 및 순응도 향상에 기여 할 수 있으며, 향후 연구를 통해 웨어러블 로봇에 최적화된 동적 결착 시스템 개발의 기반이 될 것으로 기대한다.
FOOTNOTES
-
ACKNOWLEDGEMENT
This work was supported by the National Research Foundation of Korea (NRF) grant funded by the Korea government(MSIT) (IRIS Project No. RS-2022-NR067545).
Fig. 1Small-scale adjustable fastening structure characteristics and deformation mechanism. (a) Small-scale braided sleeve and its braiding angle, (b) Initial length of braided sleeve, (c) Compressed length of braided sleeve, (d) Arrangement and working mechanism of the wire tendon structure for diameter control, and (e) Zigzag installation of the wire, showing the fixed point and pull point
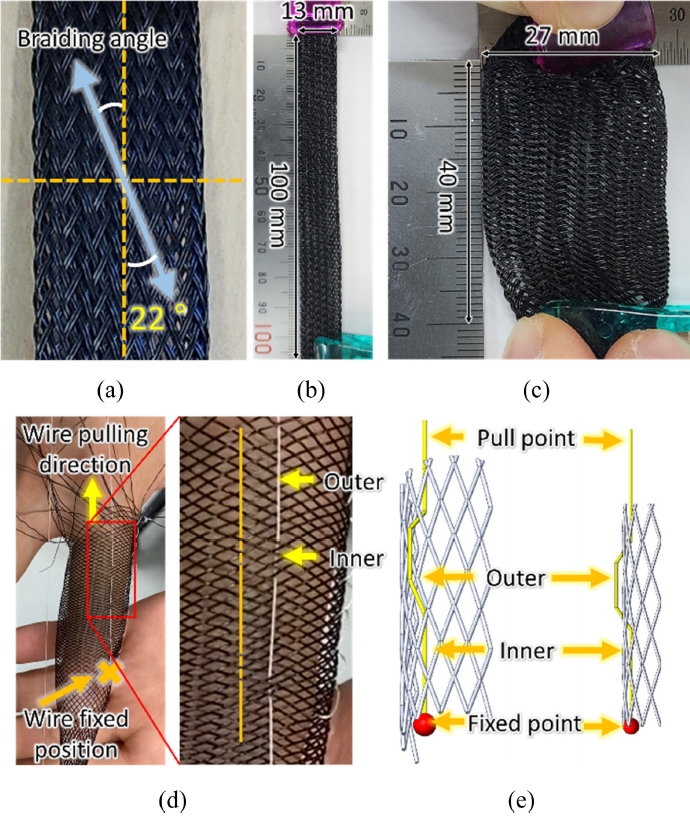
Fig. 2Attachment process of small-scale adjustable fastening structure. (a) Initial state with expanded diameter, (b) Finger insertion, (c) Attached state with contracted diameter, and (d) Increased attachment force under axial load
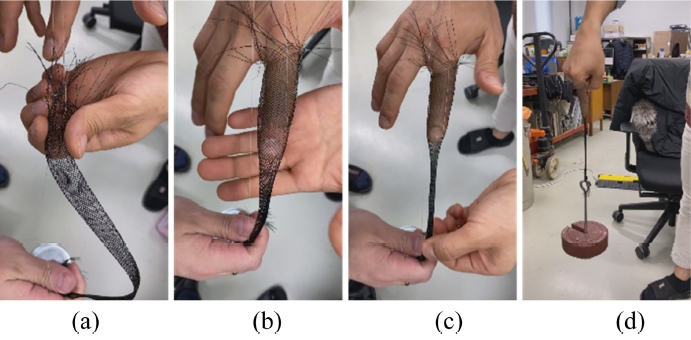
Fig. 3Detachment process of small-scale adjustable fastening structure. (a) Attached state on finger, (b) Diameter expanded for detachment by pulling wire tendon, and (c) Easy finger removal
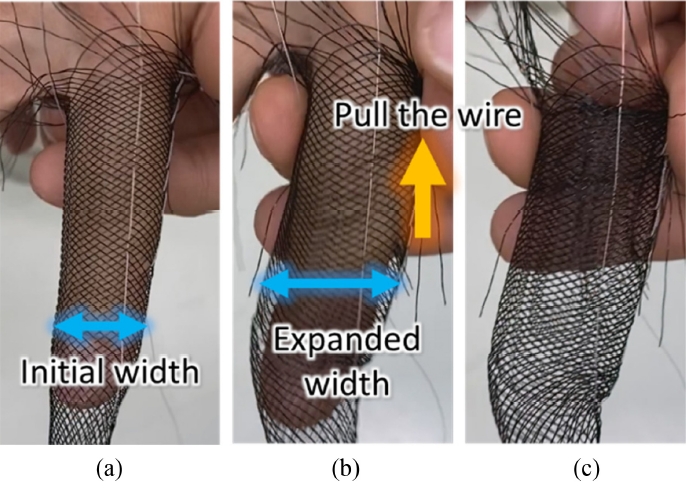
Fig. 4Flexibility of small-scale adjustable fastening structure. (a) Closely fitted to the finger and (b) Maintaining close fit during finger bending.
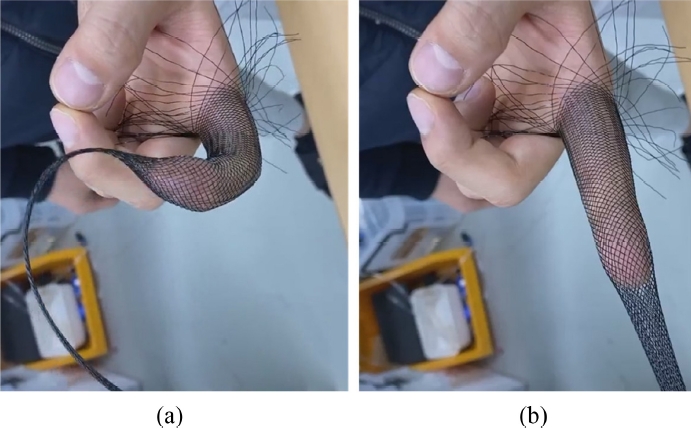
Fig. 5Fabrication process of large-area adjustable fastening structure and mode classification. (a) Zigzag stitching for fray prevention of sheets, (b) Fabrication of cylindrical adjustable fastening structure by overlapping two sheets, (c) Exercise mode and (d) Daily mode
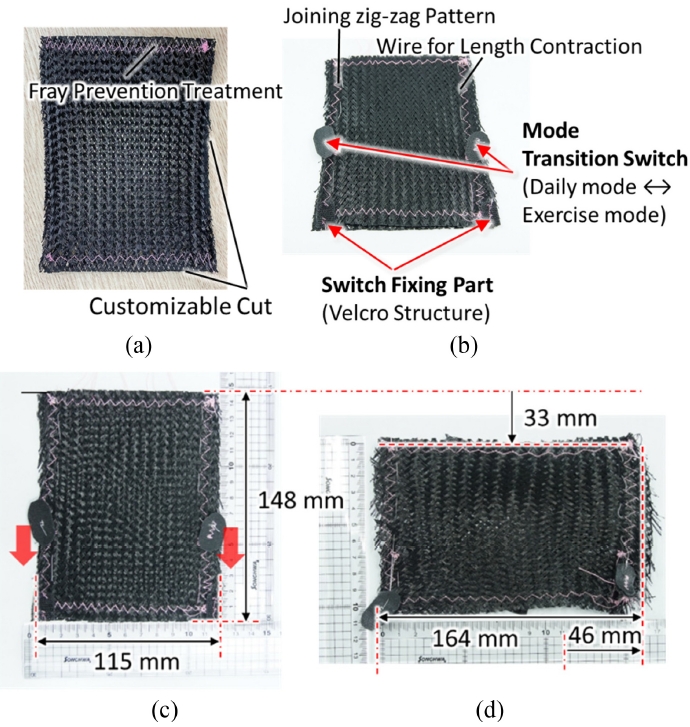
Fig. 6Measurement of fundamental parameters for the fabrication of a large-area adjustable fastening structure. (a) Shore hardness measurement result (Shore 00 20), and (b) Skin friction force measurement result.
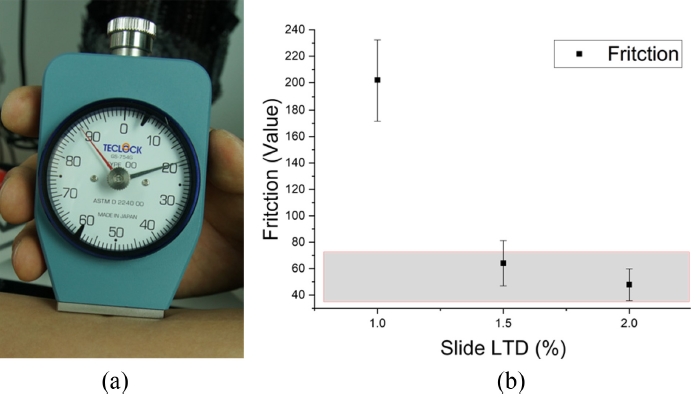
Fig. 7Comparison of large-area adjustable fastening structure before and after tension in low surface friction environment. (a) Daily mode and (b) Exercise mode
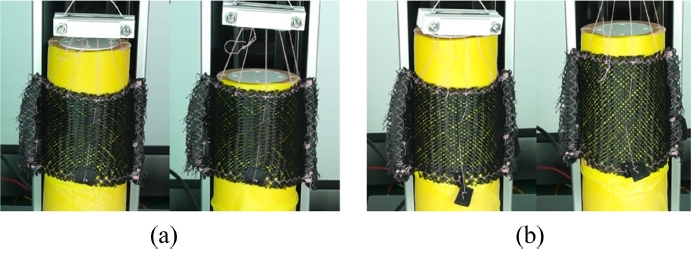
Fig. 8Measured holding force graph of large-area adjustable fastening structure by working mode in low surface friction environment
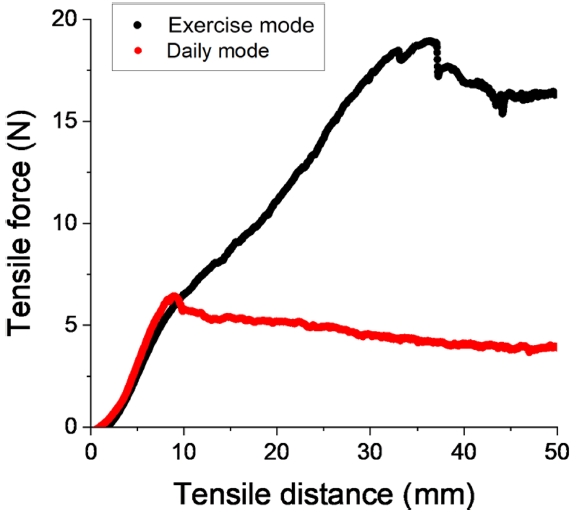
Fig. 9Comparison of large-area attachment structure before and after tension in high surface friction environment. (a) Daily mode and (b) Exercise mode
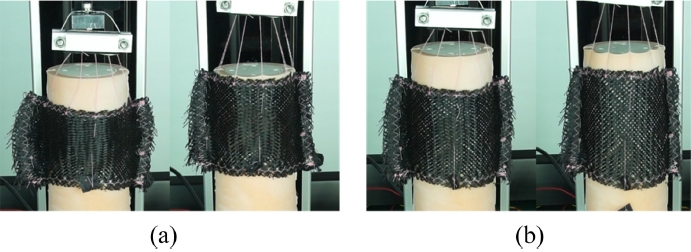
Fig. 10Measured holding force graph of large-area adjustable fastening structure by working mode in high surface friction environment
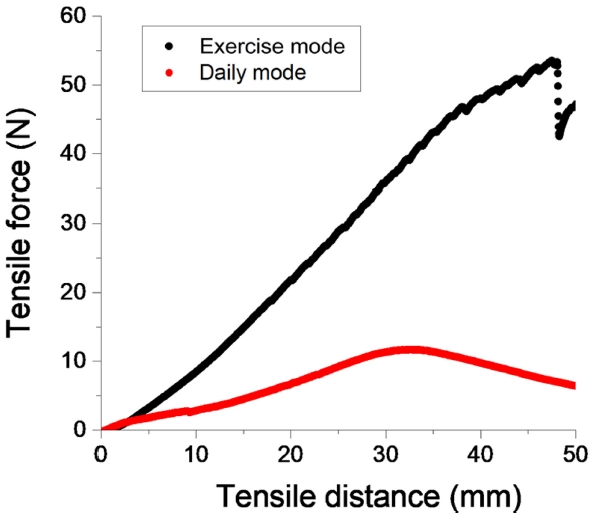
Table 1.Parameters for small-scale adjustable fastening structure
Table 1.
|
Specification (Unit) |
Value |
|
Material |
PET |
|
Wire diameter [mm] |
0.24 |
|
Braiding angle [°] |
22 |
|
Initial vertical length (Lo) [mm] |
100 |
|
Final vertical length (Lf) [mm] |
40 |
|
Initial horizontal width (Wo) [mm] |
13 |
|
Final horizontal width (Wf) [mm] |
27 |
Table 2.Parameters for large-scale adjustable fastening structure
Table 2.
|
Specification |
Value (Unit) |
|
Material |
PET |
|
Wire diameter [mm] |
0.24 |
|
Braiding angle [°°] |
30 |
|
Initial vertical length (Lo) [mm] |
148 |
|
Final vertical length (Lf) [mm] |
115 |
|
Initial horizontal width (Wo) [mm] |
115 |
|
Final horizontal width (Wf) [mm] |
164 |
REFERENCES
- 1. Zhou, Y. M., Hohimer, C. J., Young, H. T., McCann, C. M., Pont-Esteban, D., Civici, U. S., Jin, Y., Murphy, P., Wagner, D., Cole, T., (2024), A portable inflatable soft wearable robot to assist the shoulder during industrial work, Science Robotics, 9(91), eadi2377.
- 2. Shi, K., Kong, K., (2025), Recreating human ability with wearable robotics technology, Nature Reviews Electrical Engineering, 2, 369-370.
- 3. Park, Y.-L., Chen, B.-r., Pérez-Arancibia, N. O., Young, D., Stirling, L., Wood, R. J., Goldfield, E. C., Nagpal, R., (2014), Design and control of a bio-inspired soft wearable robotic device for ankle–foot rehabilitation, Bioinspiration & Biomimetics, 9(1), 016007.
- 4. Lotti, N., Xiloyannis, M., Durandau, G., Galofaro, E., Sanguineti, V., Masia, L., Sartori, M., (2020), Adaptive model-based myoelectric control for a soft wearable arm exosuit: A new generation of wearable robot control, IEEE Robotics & Automation Magazine, 27(1), 43-53.
- 5. Huo, W., Mohammed, S., Moreno, J. C., Amirat, Y., (2014), Lower limb wearable robots for assistance and rehabilitation: A state of the art, IEEE Systems Journal, 10(3), 1068-1081.
- 6. Liu, T., Xia, H., Lee, D.-Y., Firouzeh, A., Park, Y.-L., Cho, K.-J., (2021), A positive pressure jamming based variable stiffness structure and its application on wearable robots, IEEE Robotics and Automation Letters, 6(4), 8078-8085.
- 7. Choi, B, Lee, Y, Lee, J, Lee, M, Lim, B, Park, Y. J, Kim, K, Kim, Y.-J, Shim, Y, (2019), Development of adjustable knee assist device for wearable robot based on linkage and rolling joint. Proceedings of the IEEE/RSJ International Conference on Intelligent Robots and Systems. 4043-4050.
- 8. Xiloyannis, M., Chiaradia, D., Frisoli, A., Masia, L., (2019), Physiological and kinematic effects of a soft exosuit on arm movements, Journal of Neuroengineering and Rehabilitation, 16(1), 29.
- 9. Zhang, H., Shea, H., (2025), Clutchable fabric actuator for energy‐efficient wearable robots, Advanced Functional Materials, 35(6), 2415099.
- 10. Nguyen, P. H., Zhang, W., (2020), Design and computational modeling of fabric soft pneumatic actuators for wearable assistive devices, Scientific reports, 10(1), 9638.
- 11. Choi, H., Kang, B. B., Jung, B.-K., Cho, K.-J., (2019), Exowrist: A soft tendon-driven wrist-wearable robot with active anchor for dart-throwing motion in hemiplegic patients, IEEE Robotics and Automation Letters, 4(4), 4499-4506.
- 12. Daerden, F., Lefeber, D., (2001), The concept and design of pleated pneumatic artificial muscles, International Journal of Fluid Power, 2(3), 41-50.
Biography
- Yong-Sin Seo
Postdoctoral Researcher, Advanced Robotics Research Center, Korea Institute of Machinery & Materials. His research interest is Soft robotics.
- Jae-Young Lee
Student Researcher, Advanced Robotics Research Center, Korea Institute of Machinery & Materials. His research interest is Soft robotics.
- Cheol Hoon Park
Principal Researcher, Advanced Robotics Research Center, Korea Institute of Machinery & Materials. His research interest is Wearable robot.
- Sung-Hyuk Song
Assistant Professor, Department of Electronic Engineering, Sogang University. His research interest is Soft robotics.