ABSTRACT
As the demand for precision in the manufacturing industry grows, Digital Twin (DT) technology is gaining attention for its potential to enhance equipment performance and process reliability. However, existing research has primarily focused on specific stages of design or operation, leaving a gap in the literature concerning DT models that can be utilized throughout the entire equipment lifecycle. To address this gap, this study proposes a method for developing a DT that employs a consistent Finite Element (FE) model across all phases of the equipment lifecycle. We utilized actual measurement data to ensure high fidelity in the FE model of previous-generation equipment, which we refer to as the Pre-DT. This Pre-DT was instrumental in improving design during the new equipment development phase. Additionally, the DT model was implemented to predict equipment status in real time using the Reduced-Order Model (ROM) method, functioning as a virtual sensor during operation. This approach was applied to the equipment development process, aligned with the asset lifecycle concept of RAMI 4.0, and was tested on an MLCC cutting equipment to validate its effectiveness.
-
KEYWORDS: Digital twin, Virtual sensor, MLCC, Reduced order model, Smart factory, Cyber-physical systems
-
KEYWORDS: 디지털 트윈, 가상센서, 다층 세라믹 커패시터, 축소모델, 스마트팩토리, 사이버-물리 생산시스템
1. 서론
최근 제조 분야에서 요구하는 정밀도가 높아지면서 설비의 성능 또한 중요성이 높아지고, 이를 활용한 공정의 신뢰성은 지속적인 도전을 받고 있다. 이러한 변화는 설비의 설계 단계에서부터 운영 및 유지보수 단계까지의 전 생애주기 단계에서 통합적 관리가 요구되는 것을 의미한다. 이를 위한 핵심기술로 최근 디지털 트윈(Digital Twin, DT)이 주목받고 있다[
1]. DT는 Industry 4.0의 핵심기술로서 물리적인 설비를 가상공간에서 실시간으로 재현하고 예측, 제어하는 기술이다[
2]. DT는 센서 기술과 IoT, FEM (Finite Element Method) 및 CFD (Computational Fluid Dynamics) 기반의 시뮬레이션, 인공지능(AI) 등과 통합되어 설비 상태를 모니터링하고 공정 품질을 향상시킬 수 있는 것으로 알려져 있다[
3].
Grives는 DT를 물리적 객체(Physical Entity)와 가상 객체(Virtual Entity), 이를 연결하는 데이터 흐름으로 정의하였고[
4], Tao는 물리, 가상, 엔티티, 서비스, 데이터, 연결성의 5차원 구조로 확장하여 재정의하였다[
5]. 이는 DT가 단순한 시뮬레이션이 아니라 물리와 가상의 동적인 상호작용에 기반하는 지능형 시스템임을 강조한다.
DT 기술은 모델을 구현하는 방식에 따라 Physics 기반, Data 기반, Hybrid 기반으로 구분된다[
6]. Physics 기반 DT는 다물리장 해석을 이용하여 예측 신뢰성을 확보하나 계산 비용이 큰 단점이 있고, Data 기반 DT는 연산 속도는 빠르지만 물리적 인과관계에 대한 설명력이 낮다[
7,
8]. Hybrid DT는 앞의 두 접근법을 결합하여 설명 가능성과 예측 유연성을 모두 확보하는 방식이며, 최근 DT의 주요 연구 방향으로 자리잡고 있다[
9].
DT 연구는 기술의 발전과 함께 산업 응용 범위 또한 빠르게 확대되고 있다. Aivaliotis [
10], Luo [
9], Cui [
6] 등은 설비 및 공작기계의 예지보전을 위한 고충실도(High-fidelity) 모델 및 Hybrid 접근법을 제안하였다. 또한 Müller는 제조 시스템의 제어[
3], Ritto는 구조 신뢰성 평가에 DT를 적용하였다[
7]. Tao, Cui, Wang은 각각 설계, 운영, 예지보전 단계에서 DT 활용을 적용하였다[
5,
6,
8]. 생애주기의 데이터 통합 관점에서는 Pronost가 설계-운영 간 연계 가능성을 논의한 바 있고[
1], Lee [
11]는 PLM(Product Lifecycle Management)과 DT의 통합을 제시하였다. 최근 로봇, 재료, 식품 공정 등 다양한 산업으로 그 적용 범위를 넓혀가면서 DT의 범용성을 증명하고 있다[
12-
14].
선행연구의 발전에도 불구하고 설비 개발에서 전 생애주기를 통합적으로 관리할 수 있는 방법론은 여전히 부족한 상태이다. 선행연구의 대부분이 설계 최적화나 성능 모니터링 등 특정 단계에만 집중되어 있기 때문이다. 특히 설계 단계에서 구축된 FE (Finite Element) 모델은 방대한 계산량으로 인해 실시간 동작이 중요한 제조 운영 단계에서는 활용하기 어려운 한계점이 있다. 이로 인해 설계 데이터가 운영 단계로 이어지지 못하는 엔지니어링 모델 단절(Model Discontinuity) 현상이 발생하며 결과적으로 생애주기 전체의 예측 신뢰성을 떨어뜨리는 원인이 된다.
본 연구는 설계 단계에서 운영 단계까지 동일한 물리기반 CAE (Computer-aided Engineering) 모델을 연속적으로 활용하는전 생애주기 일관형의 디지털 트윈 구축 방법을 도입하였다. 설계 단계의 FE 모델을 축소모델(Reduced Order Model, ROM)을 사용하여 경량화하고 물리적 정합성을 유지한 상태로 운영 단계의 환경에 맞게 활용하는 방법이다. 이 방법은 RAMI 4.0의 생애주기 개념을 기반으로 설계와 운영 데이터를 단일 모델을 이용하여 확장 사용하는 점에서 의의가 있다. 이를 통해 모델의 일관성(Consistency)과 관측 가능성(Observability)을 확보할 수 있고, 특히 가상센서(Virtual Sensor) 기술을 적용하여 기존의 모델 단절 문제를 극복하도록 하였다. 또한 FE 모델 자산의 재활용성을 확보하여 사전 설계 검증과 실시간 상태 진단을 가능하게 한다.
본 논문의 구성은 다음과 같다. 2장에서는 RAMI 4.0 기반의 DT 구조와 LTI-ROM을 이용한 모델 축소 방법을 포함하는 제안 방법을 설명한다. 3장에서는 MLCC (Multi-layer Ceramic Capacitor) 절단 설비에 대한 사례연구를 통해 제안 방법을 검증하고, 4장에서는 결론을 맺는다.
2. 제안 방법
제조설비의 전 생애주기에서 일관된 모델로 활용 가능한 DT의 구축 방법을 제안한다. 이를 위해서 RAMI 4.0 기반의 Type - Instance 구조를 참조하였으며, 설계 단계의 FE 모델을 운영 단계의 ROM 기반 Instance 모델로 연결하는 절차를 설명한다. 또한 Pre-DT, ROM을 기반으로 가상센서를 구성하는 가상공간의 설계 방법을 설명한다.
2.1 RAMI 4.0 기반 제조설비 디지털 트윈 구조
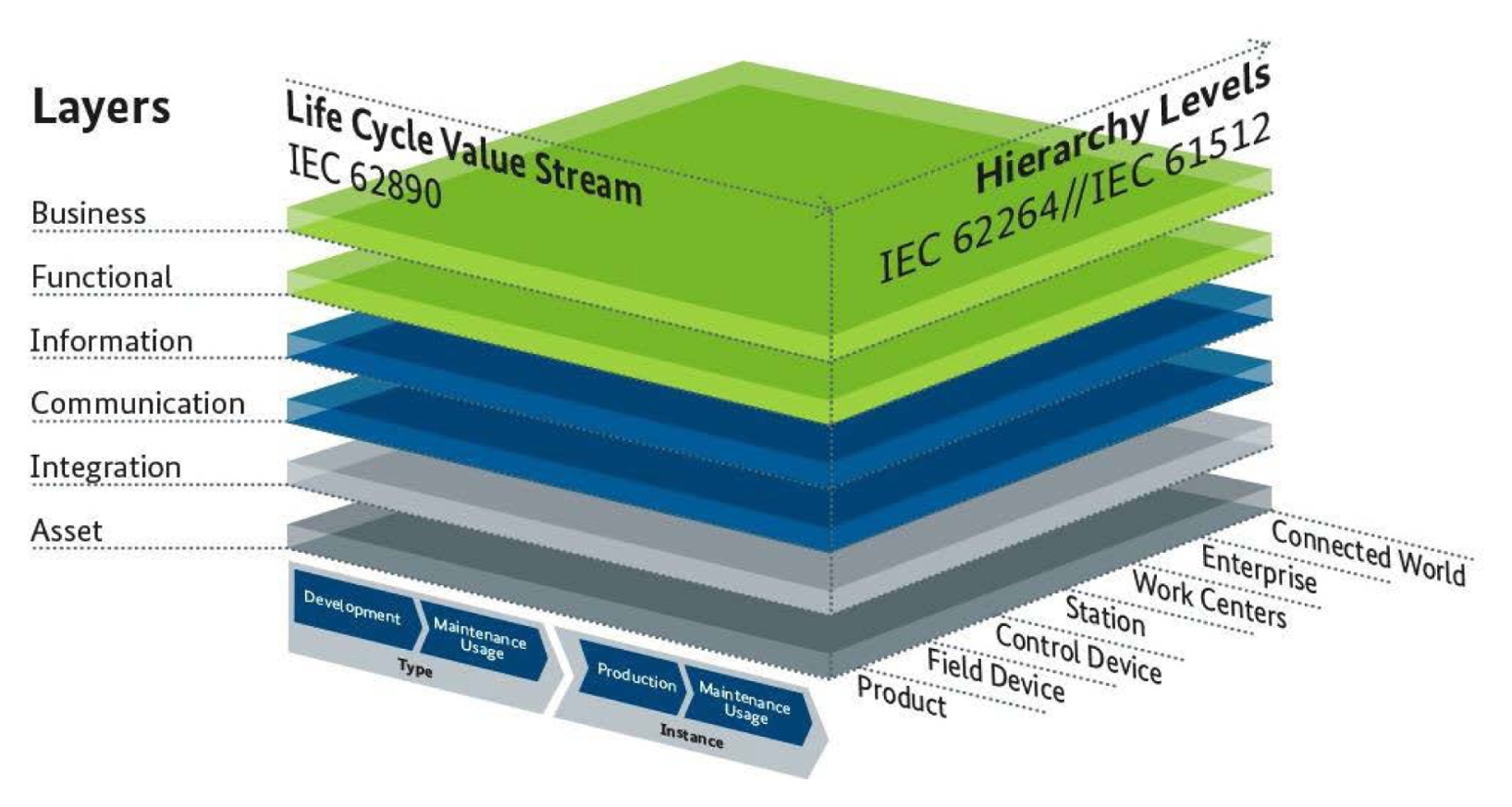
RAMI 4.0은 제조 분야에서 널리 참조되고 있는 스마트팩토리 표준 프레임워크이다.
Fig. 1과 같이 제조 시스템의 복잡성을 생애주기(Life Cycle & Value Stream), 계층(Hierarchy Levels), 레이어(Layers)의 세 축으로 설명하고 있다. 설비, 공정, 운영 간의 데이터와 기능 통합을 설명하며 디지털 트윈 구축할 때 모델의 위치와 역할을 규정하는 기준을 제공한다[
15].
본 연구에서는 생애주기 축에서 제시된 Type-Instance 개념을 참조하였다. RAMI 4.0의 생애주기 축에서 Type은 설비 개발 단계에서 정의되는 기준 모델인 동시에 가상공간의 모델이다. Type 모델은 설비의 형상 정보(Geometry), 재료 물성, 조립 조건, 설계 공차 등의 엔지니어링 정보가 포함되며, 설비의 구조(Structural) 해석 관점에서는 원본모델(Full-order Model, FOM)이기 때문에 일반적으로 FEM으로 구축된다.
Instance는 제조 현장에서 실제로 운전되는 설비로 정의할 수 있다. 설비의 물리적인 상태와 운영 데이터가 반영됨과 동시에 가상공간에 구현된 개별 설비의 모델이다. Instance 모델은 Type 모델을 기반으로 구축되지만, 설비마다 다른 사용 조건, 가공 부하, 마모, 열화 등에 따라 서로 다른 동적 특성을 가질 수 있다. 따라서 디지털 트윈이 생애주기 전반에서 일관성을 유지하기 위해서는 Type 단계에서 정의된 물리기반 모델이 Instance 단계에서도 활용될 수 있어야 한다.
그러나 운영 단계의 설비는 실시간 예측과 상태 추정이 요구되는데, FOM의 높은 계산 비용을 현장의 설비에 바로 적용하기에는 근본적인 한계가 존재한다. 이 문제를 해결하기 위하여 Type 단계의 FOM을 운영 단계에서도 활용 가능하도록 경량 모델로 변환하는 ROM 기법을 적용해야 한다.
ROM은 설계 단계에서 구축된 FOM을 모달(Modal) 해석 기반의 축소 기법(예: Craig-Bampton 기반 Component Mode Synthesis) 또는 스냅샷(Snapshot)을 이용한 축소 기법으로 저차원의 상태방정식 형태로 변환한 모델이다. ROM은 FOM과 유사한 물리 지배방정식을 갖지만 계산 비용은 크게 감소되므로, 실시간 상태 모니터링을 수행해야 하는 운영 단계의 Instance 모델 구현 방법으로 적합하다.
ROM 기반 모델은 Type-Instance 구조의 연속성을 유지하여 설계 단계에서 정의된 모델이 운영 단계까지 확장 활용될 수 있도록 하는 공학적인 도구(Tool) 역할을 한다.
2.2 제조설비 전 생애주기 일관형 디지털 트윈 구축 프로세스
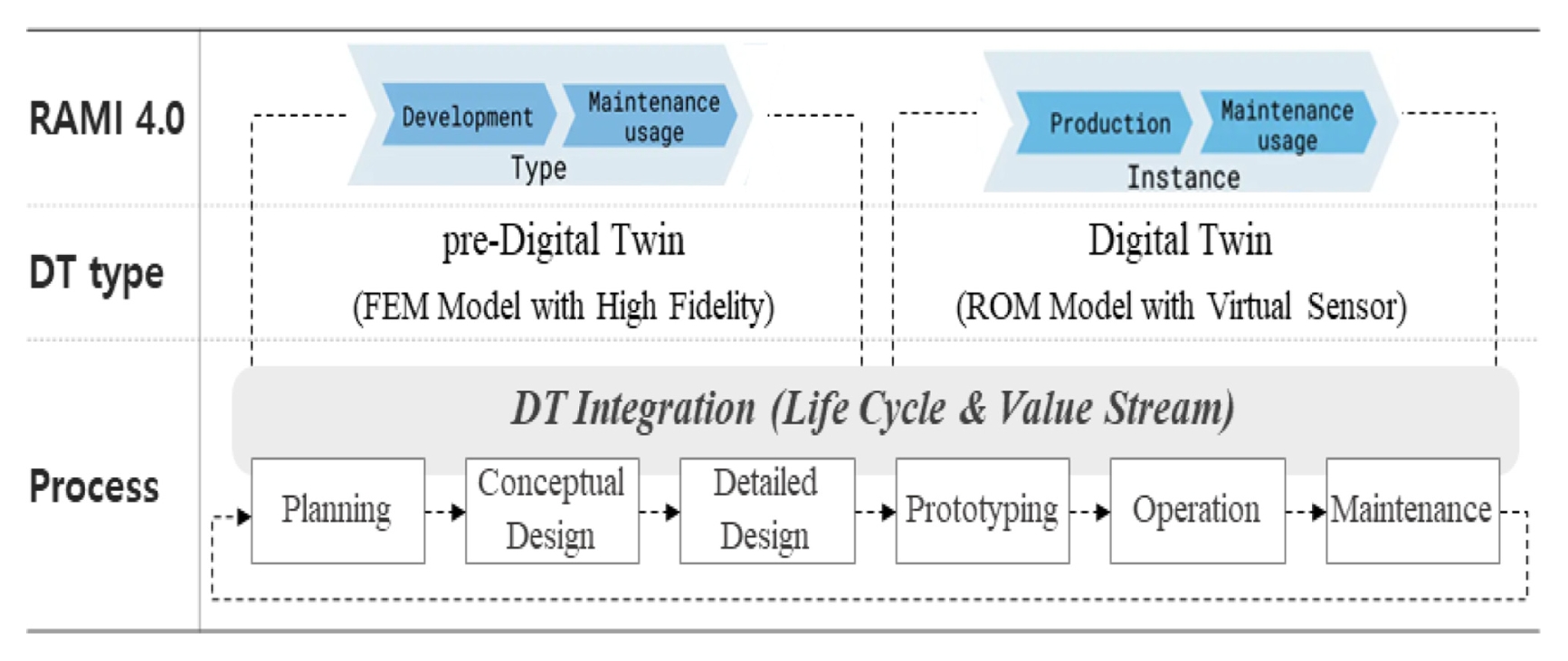
사내개발 제조 설비는 기획(Planning), 개념설계 (Concept Design), 상세설계(Detailed Design), 시제작 (Prototype), 운영(Operation), 유지보수(Maintenance) 로 이어지는 반복 개발사이클이 일반적이다. 특히 디지털 트윈 기반 설비 개발에서는 각 단계에서 Type-Instance 구조를 기반으로 한 DT 모델의 역할이 명확히 정의되어야 한다. 본 연구는 완전히 새로운 설비의 개발보다는, 기존 설비를 기반으로 기능과 구조가 단계적으로 개선되는 파생형 설비 개발(Derivative Development)을 대상으로 한다.
Fig. 2는 제조설비 전 생애주기 일관형 디지털 트윈 구축 프로세스를 나타낸다. RAMI 4.0의 Type과 Instance 개념을 반영한 것이다. 설비 개발 단계에서의 DT를 Pre-Digital Twin(Pre-DT), 설비운영 단계에서의 DT를 Digital Twin (DT)으로 정의하였다. 디지털 트윈 개발 초기의 핵심은 Pre-DT의 활용과 가상센서(Virtual Sensor) 정의를 기획단계에서 선제적으로 정의(Pre-definition) 하는 것이다. 여기서, Pre-DT는 생애주기 일관성 확보를 위한 핵심 모델 자산(Core Model Asset)으로 정의한다.
Pre-DT는 이전 세대 설비에 대해 고유진동수, 모드형상(Mode Shape), 전달함수(Frequency Response Function, FRF) 등 실측 데이터를 기반으로 FE 모델이 모델 업데이트(Model Update) 되어 높은 정합성이 확보된 DT 모델이다.
가상센서는 설비 내부의 구조나 간섭으로 인해 직접 측정할 수 없는 물리량을 실시간 ROM 모델을 통해 추정하는 소프트웨어 센서이다. 기획 단계에서 가상센싱 물리량과 관측 지점을 정확히 정의하지 않으면, 이후에 FE 모델의 구성, 경계조건 선정, 센서와 모델 사이의 정합성 확보 과정에서 재작업이 발생하게 된다. 따라서 DT 관점에서 기획 단계는 단순히 설비 요구사항만 정의하는 것이 아니라 운영 단계에서 필요한 가상센서의 위치와 관측되는 물리량을 사전에 결정하는 기능적 설계 단계로 확장되어야 한다. 이 과정에서 Pre -DT는 FE 모델의 관측 가능성(Observability)을 검증하는 기준이 된다.
Pre-DT의 정합성이 확보되어 있다면, 새로운 설비 개발 과정에서 변경되는 구조나 부품 모듈만 Pre-DT에 반영하여 사전 성능 예측을 할 수 있다. 이는 개념 설계 단계에서는 설계 아이디어를 빠르게 검증하고, 상세 설계 단계에서는 구조적인 성능을 정량적으로 평가하는데 활용 가능하다. 즉, Pre-DT는 새로운 설비의 FE 모델을 처음부터 구축해야 하는 비효율성을 제거하고, 차세대 설비 개발 과정에서 설계와 성능 예측 간의 연속적인 수단을 제공한다.
시제작 단계에서는 실제 설비 데이터를 기반으로 Pre-DT 모델의 정합성을 재검증 한다. 검증을 마친 모델은 ROM으로 변환되어 개별 설비의 Instance 모델로 생성되어야 한다. 물리 설비에 고유 식별자가 부여되고 설비 제어부에 모델이 탑재되면 제조 및 유지보수 과정에서 ROM 기반의 가상센서 사용이 가능해진다. 이는 RAMI 4.0의 Type-Instance 구조를 개념에 따라 구현한 것으로, 설계단계의 모델(Type)이 운영 단계의 실시간 상태 모니터링 모델(Instance)로 연결되는 방법을 보여준다. 본 연구의 Pre-DT는 설계 단계의 엔지니어링 데이터를 단절 없이 운영 및 차세대 설비 개발까지 연결한다는 점에서 기존 일반 시뮬레이션 연구와 차별성을 갖는다.
2.3 LTI-ROM 기반 FEM 모델 축소 방법
설계 단계에서 구축된 FE 모델 기반의 Type 모델을 운영 단계의 Instance 모델로 일관되게 활용하기 위해서는 모델의 물리적 구조는 유지하면서도 계산 효율성을 확보하는 ROM이 필요하다. FE 모델은 설비의 형상, 재료 특성 등의 물리 정보를 포함하여 수십-수백만 자유도(Degree of Freedom)의 대규모 행렬 연산을 요구하는 FOM 형태이기 때문이다.
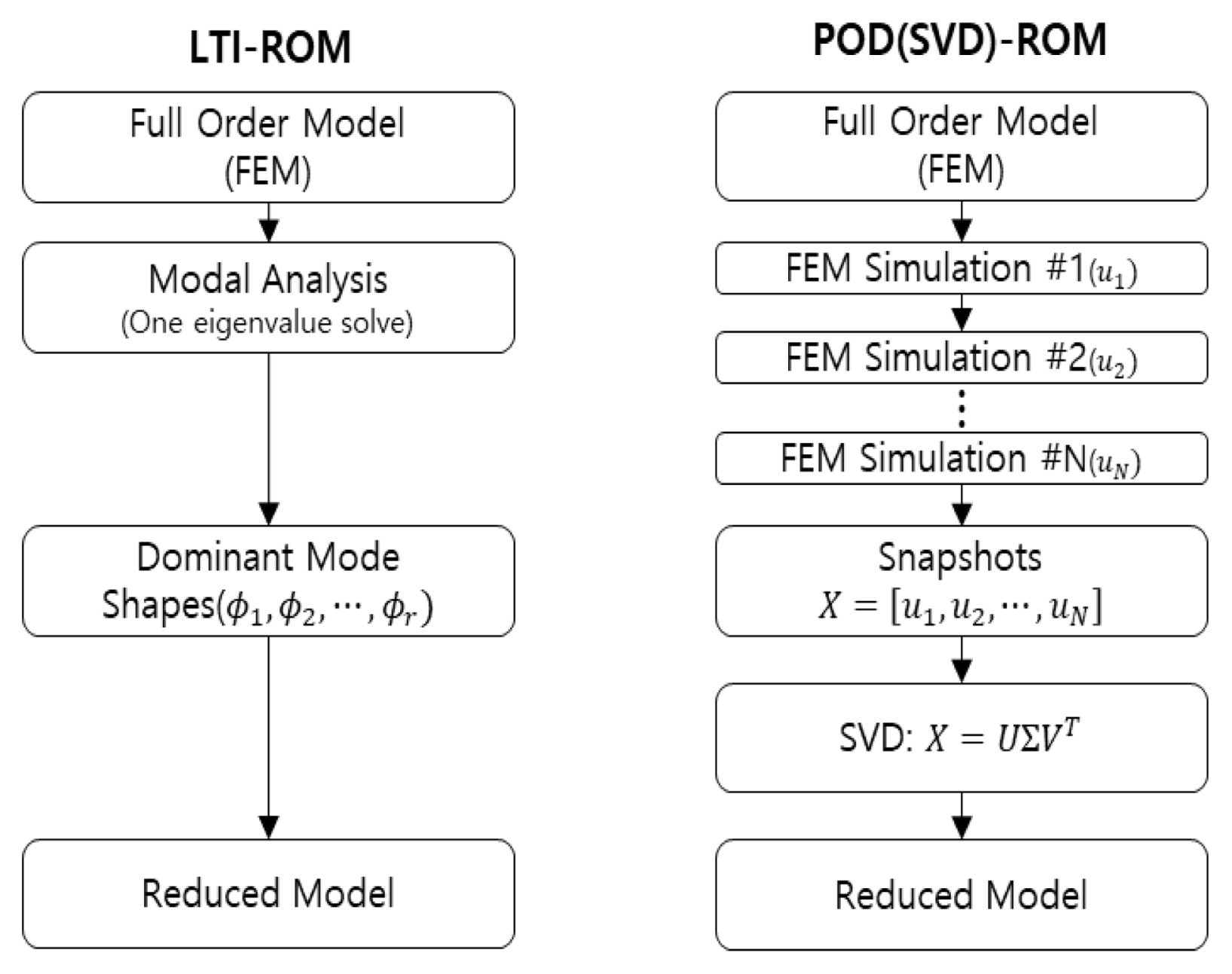
이처럼 무거운 FE 모델을 운영 단계에서도 그대로 사용하게 되면 실시간 데이터 처리에 지연(Latency)이 발생할 뿐만 아니라 하드웨어 리소스에도 과부하 문제가 발생한다. 따라서 본 연구에서는 생애주기 전반의 일관성 유지와 계산 효율성 확보를 동시 달성하기 위해서 LTI 기반의 ROM 구축 방법을 선정하였다. ROM은 고차원 시스템의 입출력 거동을 저차원 공간에 근사하여 수학적 복잡도를 낮춘 축소 모델이다. ROM 기법은 크게 POD(Proper Orthogonal Decomposition) 기반 Snapshot 축소 방식과 LTI (Linear Time-Invariant) 기반 모달 축소(Modal Reduction) 방식으로 분류할 수 있다.
Fig. 3은 두 방식의 워크플로우를 비교한 그림이다. POD 기반 축소는 다양한 입력 조건에서 계산된 스냅샷 행렬을 특이값 분해(Singular Value Decomposition, SVD)하여 기저(Basis)를 형성하는 방식으로
식(1)과 같이 표현된다.
여기서 X는 스냅샷 행렬, U와 Σ는 각각 POD 기저와 특이값 대각 행렬, VT는 우측 특이벡터의 전치 행렬이다. POD 기반 ROM은 비선형 응답까지 반영할 수 있는 장점이 있다. 그러나 시스템의 비선형 특성을 충분히 반영하기 위해서는 다수의 비선형(Non-linear) 해석을 수행해야 하기 때문에 설계 변경이 많은 개발 초기 단계에는 계산 시간에 대한 부담이 큰 편이다.
본 연구에서 채택한 LTI 기반 축소는 물리적 지배 방정식(Governing Equation)을 이용하여 저차원으로 축소하는 방식이다. 설비의 전체 자유도를 포함하는 FE 모델(FOM)의 운동방정식은
식(2)와 같다.
M, C, K는 각각 시스템의 질량, 감쇠, 강성 행렬,
F(t)는 외력 벡터,
x(t)는 전체 노드의 변위 벡터이다. 시스템을 축소하기 위해 모달 해석을 통해 얻은 상위
k개의 고유모드 행렬 Φ
k를 이용하여
식(3)과 같이 고차원의 좌표
x(t)를 저차원의 좌표
q(t)로 투영시킨다.
식(3)을
식(2)에 대입하고 모드 직교성을 고려하면 고차원의 행렬 연산은 독립적인 소규모 방정식들의 집합으로 변환된다. 이를 제어 시스템 시뮬레이션에 사용 가능한 상태공간 방정식(State-Space Equation)의 형태로 재구성하면
식(4)와 같은 LTI-ROM이 도출된다.
z(t)는 축소된 상태 벡터, u(t)는 입력 벡터, y(t)는 출력 벡터이고 Ar, Br, Cr, Dr는 축소된 시스템의 행렬들이다. LTI-ROM은 운영 단계에서 실측 센서 신호 u(t)를 입력으로 받아 설비 내부의 상태를 빠르게 계산하는 역할을 한다. ROM 계산을 통해 나오는 출력 벡터 y(t)는 FE 모델 단계에서 사전 정의된 관측 지점에 대한 가상센서로 표현된다. 이 가상센서는 설비의 운영 환경에서 직접 측정하기 어려운 내부의 물리량을 실시간으로 예측하게 한다.
LTI 모델은 구현하는 시스템을 선형(Linear)으로 가정한다. 설비 전체의 구조 강건성이나 공진 회피 설계, 진동 제어 관점에서는 선형 모델로 시스템을 근사하는 것이 계산 효율성과 해석 수렴성 측면에서 유리하기 때문이다. 더욱이, 제조공정의 실시간 모니터링에서는 복잡한 비선형 해석보다는 빠른 응답 속도와 경향성을 예측하는 것이 필요한 경우가 많기 때문에 본 연구에서는 LTI-ROM을 Instance 모델 생성 방법으로 채택하였다.
3. 사례연구
본 장에서는 적층 세라믹 커패시터(MLCC) 제조설비를 이용하여 제안된 방법의 유효성과 효과를 검증한다. 사례연구를 통하여 동일한 물리기반 모델이 설계 단계(Type)에서 운영 단계(Instance)까지 일관성을 유지하며 활용되는 과정을 실증한다.
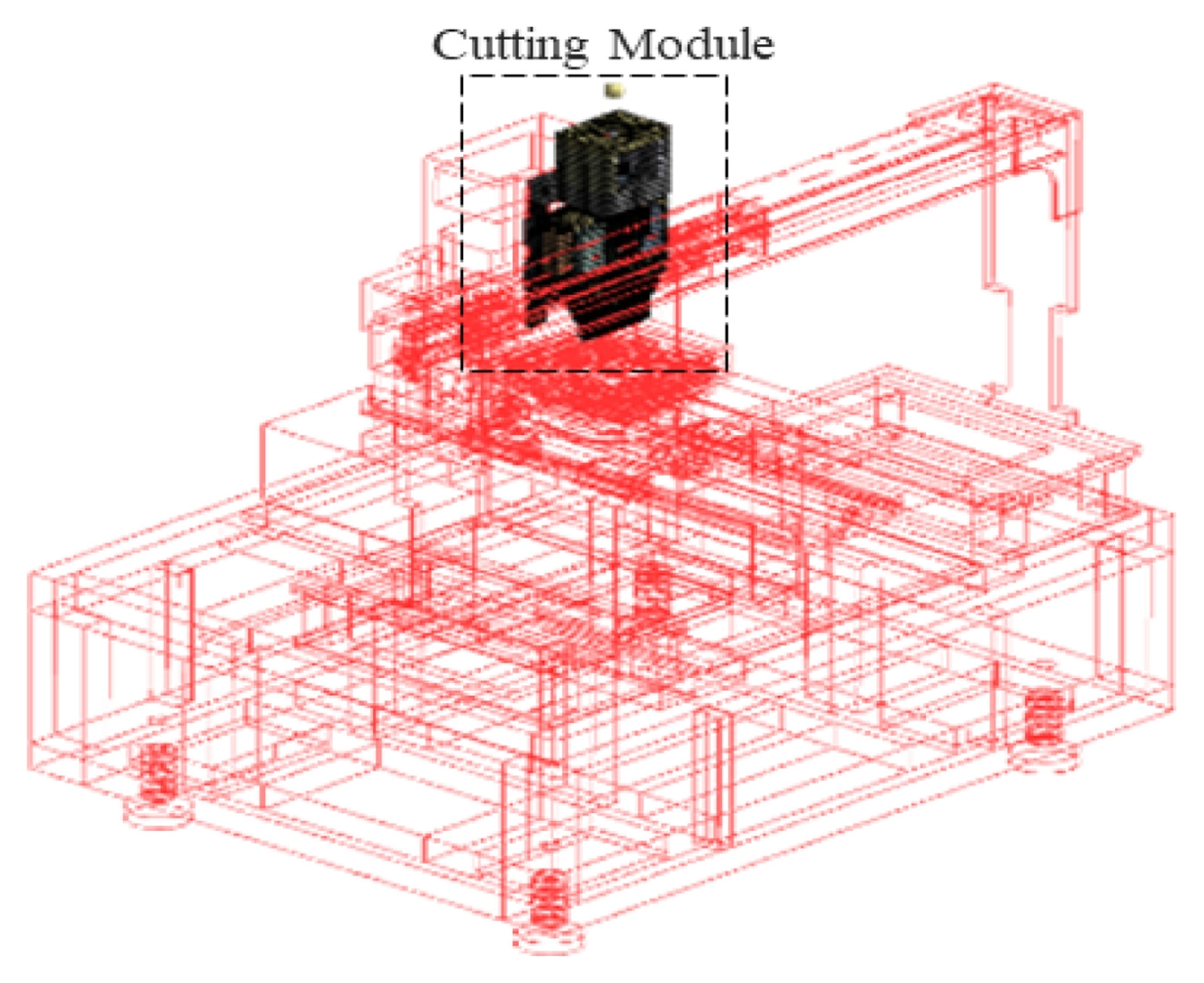
대상 제조설비는 MLCC 생산의 핵심 공정인 절단(Cutting) 공정 설비이다.
Fig. 4는 MLCC 절단 공정 설비의 예이다. 절단 설비는 시트(Sheet) 형태의 적층체를 개별 칩 단위로 절단한다. 이 과정에서 발생하는 절단 모듈의 구조 강성과 그로 인한 미세 진동, 블레이드 변위는 칩의 절단면 품질과 치수 정밀도에 결정적인 영향을 미친다. 본 사례연구에서는 현세대 절단 설비의 구동축에 장착된 절단 모듈을 대상으로 기획단계에서 Pre-DT를 구축하여 정합성을 확보한다. 그리고 설계 단계에서 Pre-DT를 활용해 구조적 문제점을 개선한다. 최종적으로 LTI-ROM 기반 가상센서를 구축하여 운영단계에서 절단 품질을 예측하는 과정을 수행한다. Pre-DT를 위한 FE 모델은 Ansys Workbench 2025 R2, LTI-ROM의 구현과 검증은 Ansys Twin Builder 2025 R2를 이용하였다.
기획 단계에서 현 세대 절단 설비의 물리적 거동을 가상공간에 정밀하게 모사하기 위한 Pre-DT를 구축하였다.
Fig. 5와 같이, 절단 모듈을 대상으로 3D 모델링을 수행하고 이를 43,880개 요소(Element)와 204,945개 노드(Node)를 갖는 Full-order의 FE 모델로 구성하였다. 모델의 신뢰성을 확보하기 위해 설비의 고유 진동수를 포함하는 주파수 응답 함수(FRF)를 측정하여 FE 모델의 물성치(밀도, 탄성계수) 및 조립부의 접촉강성(Contact Stiffness)을 보정(Model Updating)하였다. 이 모델 보정을 반복적으로 수행하여 FE 모델과 실측 데이터 간의 오차를 최소화하였다.
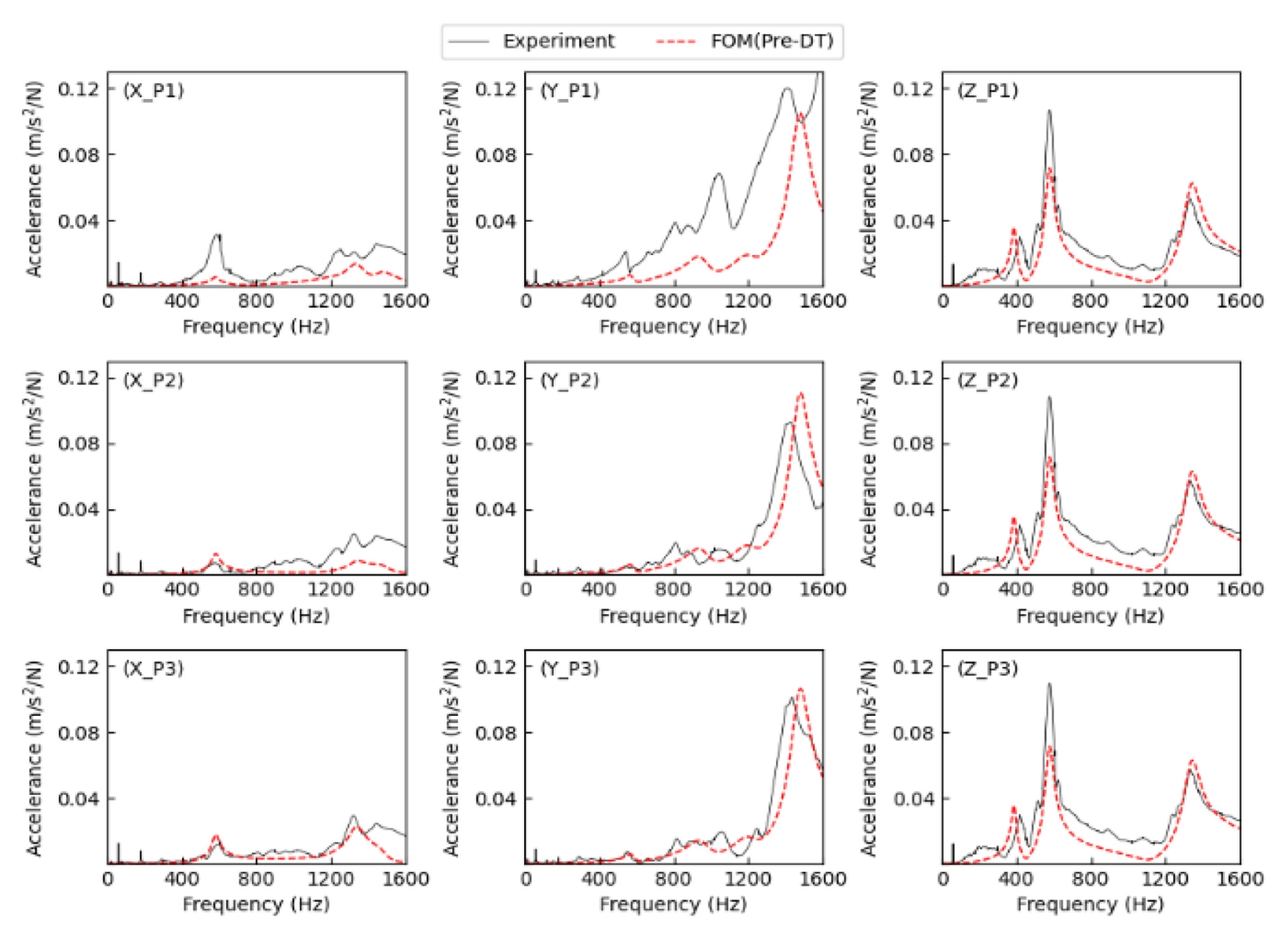
Fig. 6은 주요 절단부의 3개 위치에서 수행한 FRF 실험값과 보정된 FEM 해석 결과를 비교한 그래프이다.
흑색 실선은 FRF 실험 결과, 적색 점선은 보정된 FE 모델의 해석 결과를 나타낸다. 절단 공정에서 발생하는 주요 진동 성분이 고주파 대역까지 분포함을 고려하여, 01,600 Hz 대역에서 설비의 동적 거동이 실제와 최대한 일치하도록 정합성을 확보하였다. 절단방향 기준(Z-axis)의 최대 크기 고유진동 주파수의 오차는 583 Hz에서 0.5%이며, 최대 오차는 1,318 Hz에서 6.3% 수준이다. 절단 시 발생하는 충격 가진에 의한 공진을 예측하기 위해서는, 측정된 주파수 응답 함수(FRF)의 고유진동수를 FE 모델이 정밀하게 재현할 필요가 있다.
FE 모델의 재현성이 높을수록, 이를 기반으로 구축된 Pre-DT은 단순한 시뮬레이션을 넘어 설계 단계에서 구조적 기준 모델로 활용될 수 있다. 또한 운영 단계에서 사용되는 경량 모델의 기준선(Baseline) 으로서 핵심 자산이 된다.
3.2 Pre-DT 기반 설계 개선
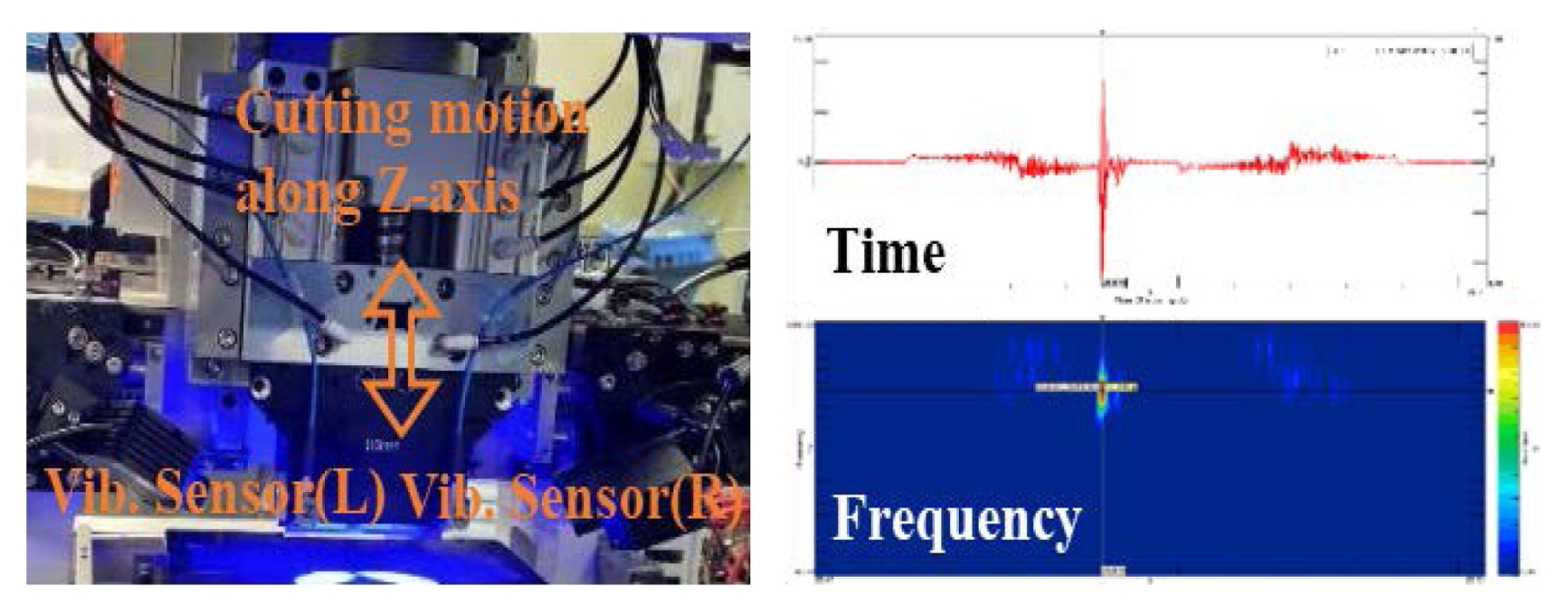
구축된 Pre-DT를 활용하여 현 세대 절단 모듈이 갖는 구조적 취약점을 분석하였다.
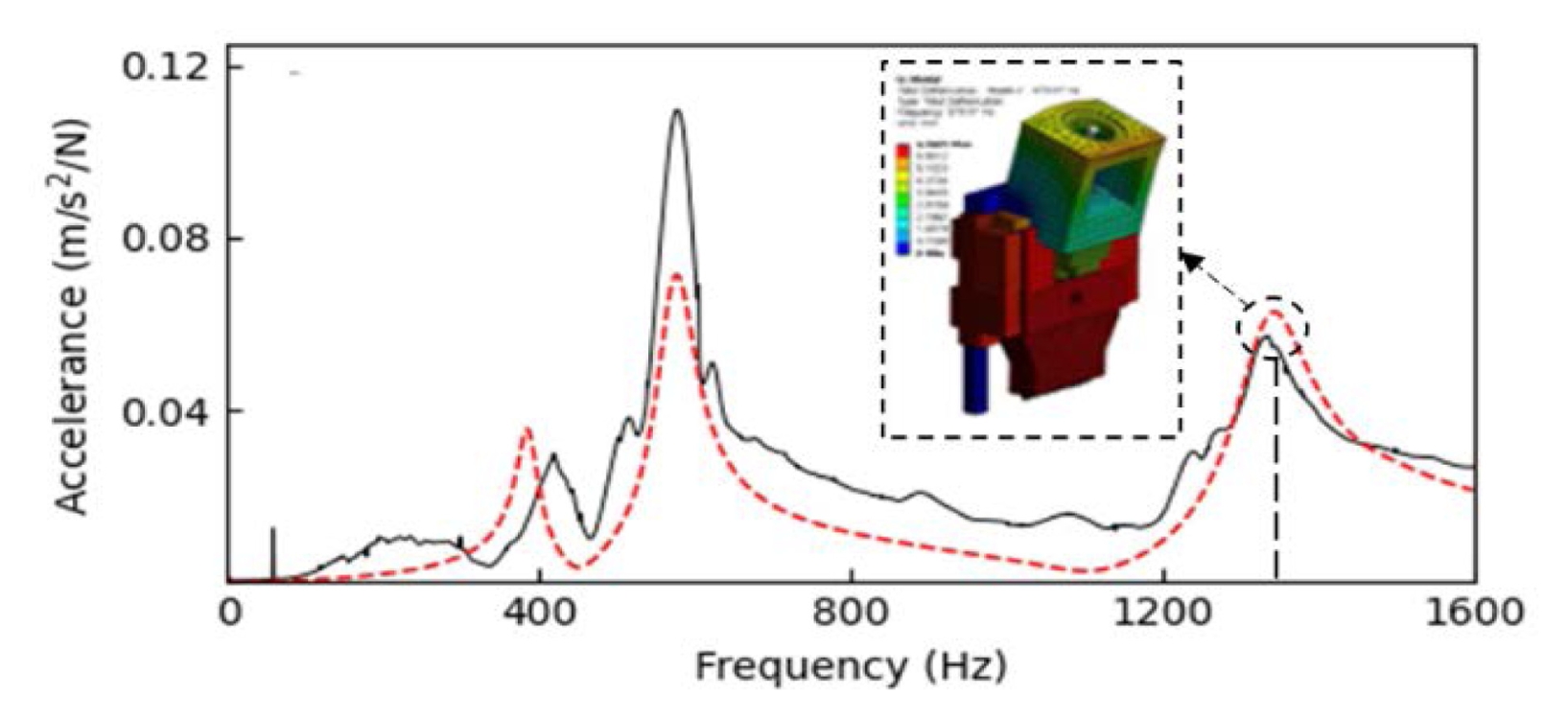
Fig. 7은 절단 불량이 발생하는 조건에서 측정된 진동 응답을 나타내며, 특정 주파수 대역에서 과도한 진동 피크(Peak)가 관측 되었다. 이 진동의 원인을 Pre-DT 기반 조화 가진 해석(Harmonic Analysis)을 통해 분석하였다. 그 결과,
Fig. 8과 같이 1,318 Hz에서 절단 모듈의 고유진동 모드와 절단 주파수가 공진을 일으키며 발생한 것으로 분석되었다.
문제의 원인으로 규명된 절단 모듈의 고유진동 모드와 절단 주파수 공진 현상은 MLCC 절단면의 크랙(Crack)이나 칩 깨짐(Chipping) 등 치명적인 품질 불량을 유발한다. 이를 해결하기 위해 Pre-DT를 이용하여 구조 변경 시뮬레이션을 수행하였다.
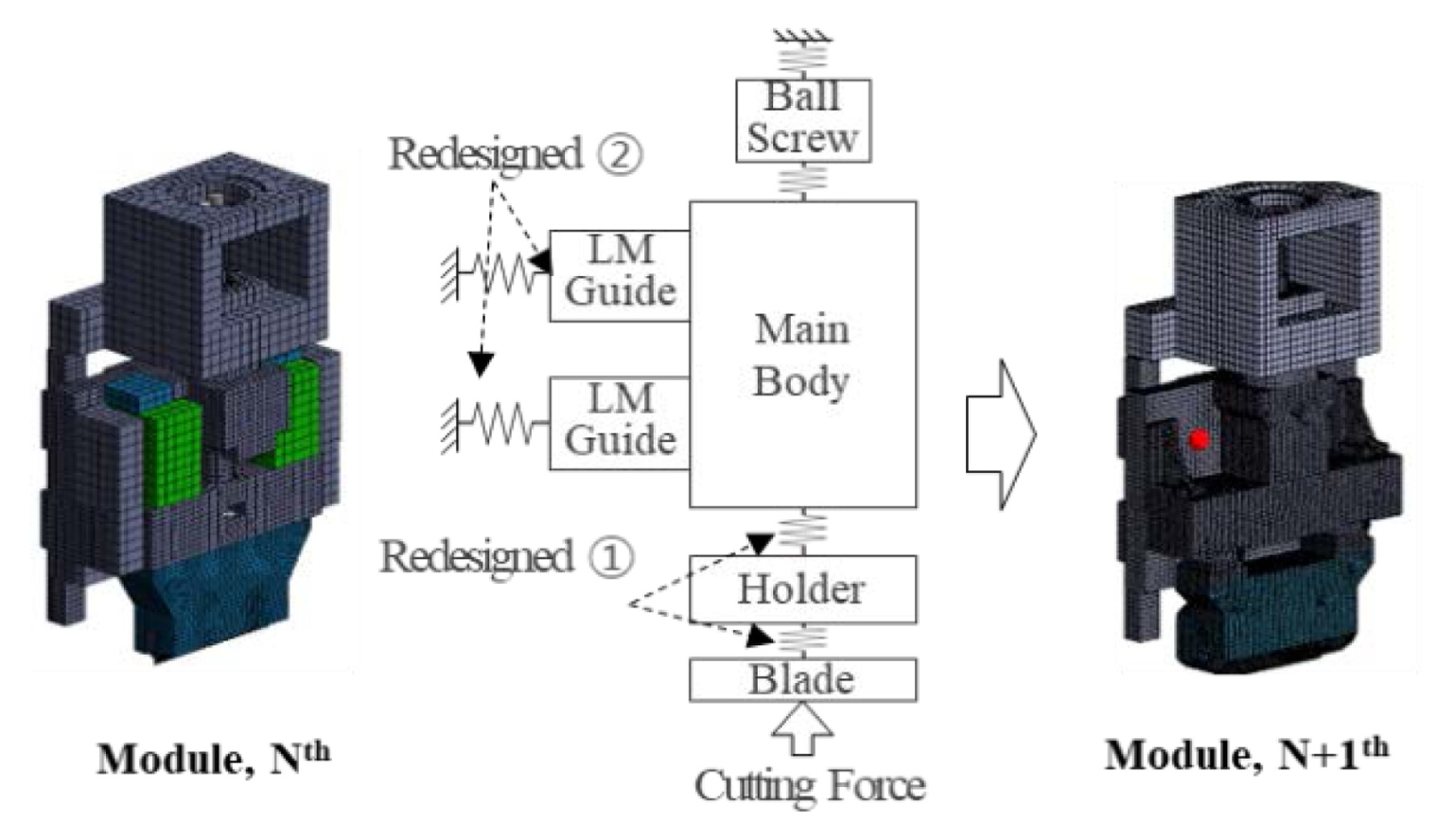
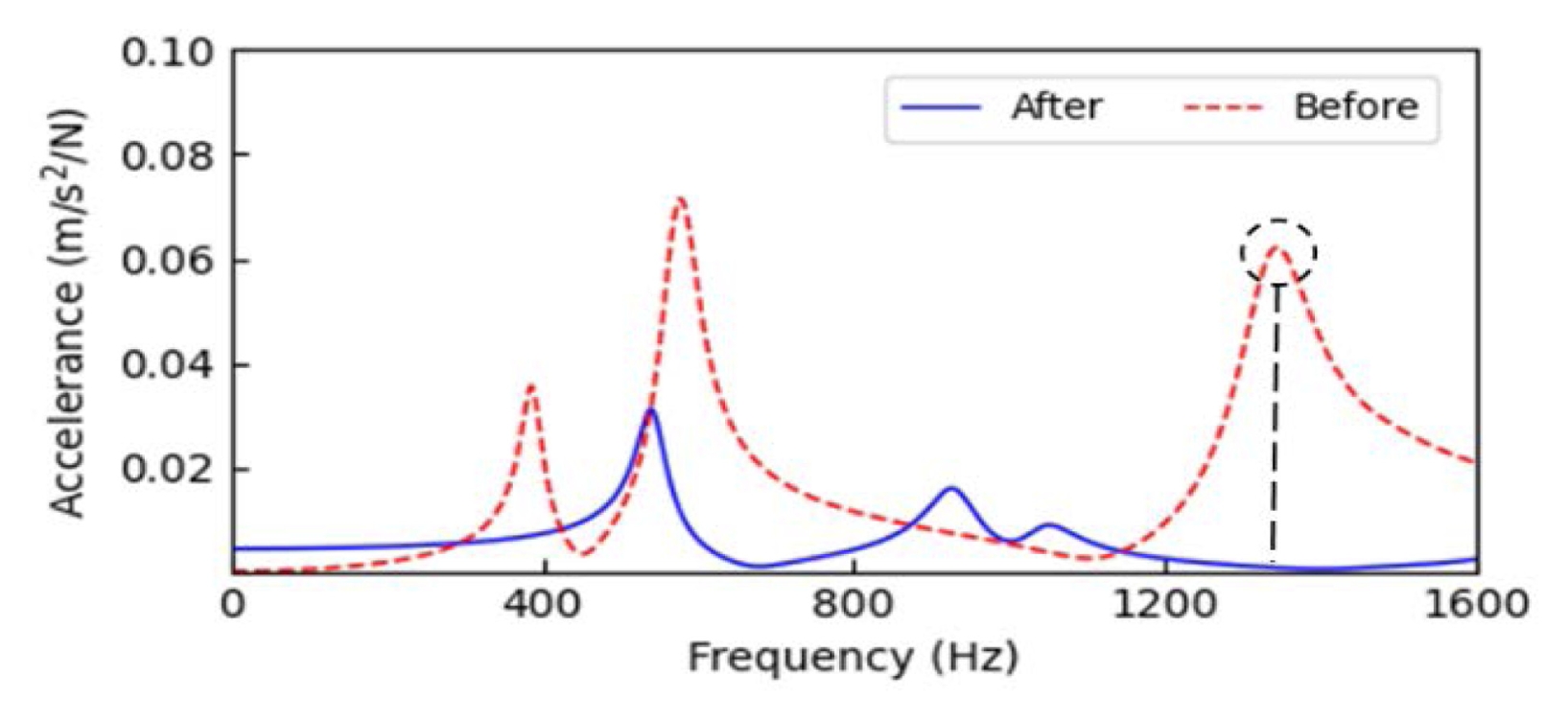
Fig. 9는 구조 변경 결과이다. 공진 회피와 동강성(Dynamic Stiffness) 증대를 목표로 블레이드와 블레이드 홀더(Holder)의 구조를 보강하고, Linear Motion (LM) Guide의 강성을 높이는 설계 변경안을 도출하였다. 개선된 설계를 Pre-DT에 다시 반영하여 검증하였다.
Fig. 10은 동강성의 변경 전(빨간색 점선)과 변경 후(파란색 실선) 진동을 나타낸다. 문제의 1,318 Hz 고유진동수가 설계적으로 보완되어 공진 위험이 제거되었다. 이는 물리적 시제품 제작없이 컴퓨터 상의 Pre-DT를 이용한 검증만으로 설계 품질을 조기 확보한 사례이다.
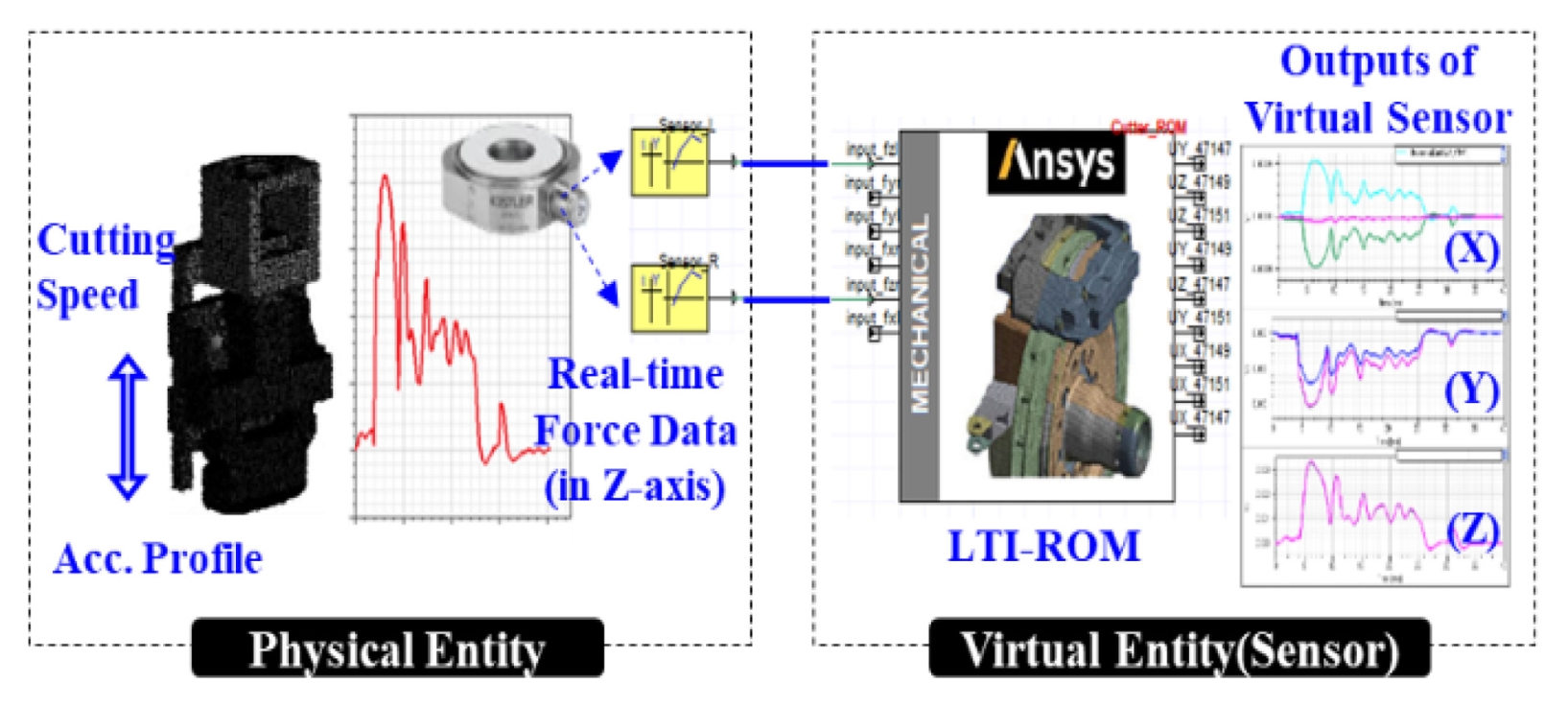
3.3 가상센서의 설계
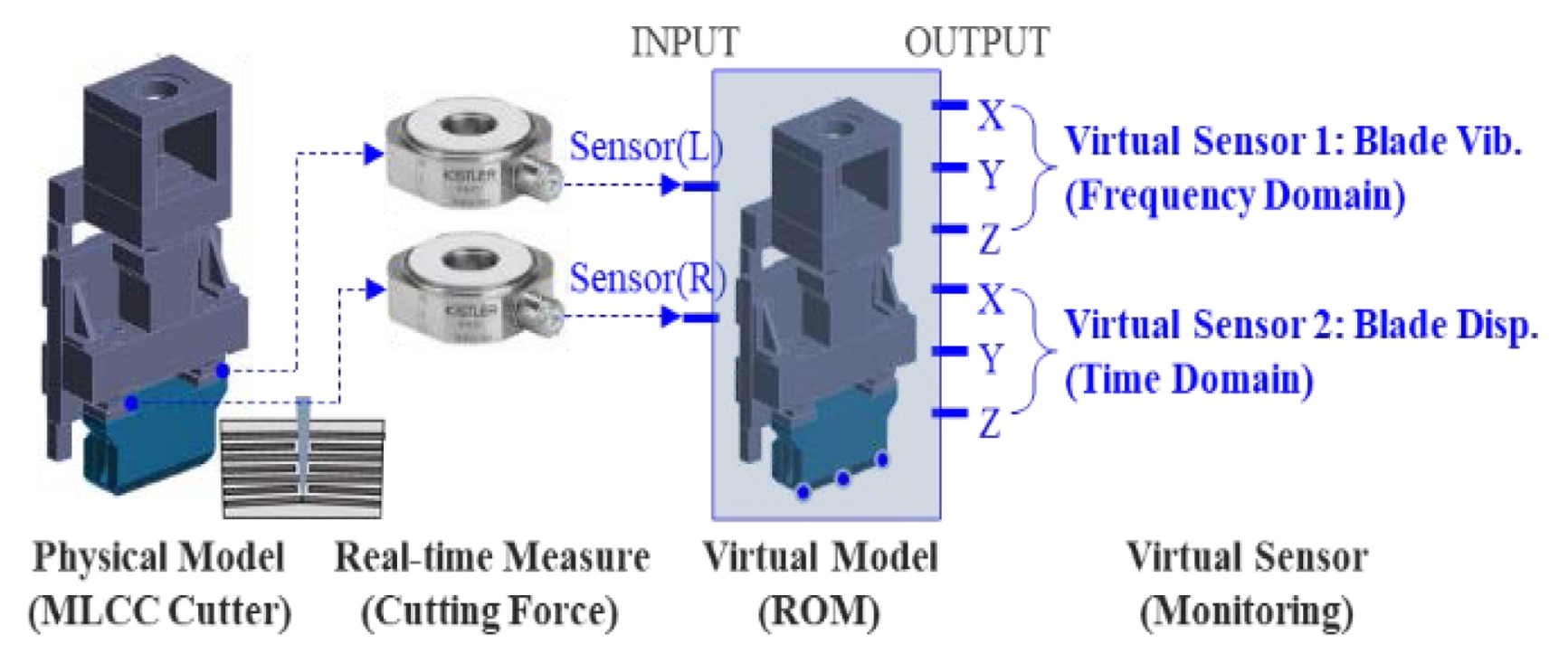
Fig. 11은 절단 모듈에 대한 가상센서 기반 DT 시스템의 구조이다. 실제 센서는 절단력을 측정하는 단축 힘센서(Force Sensor)만 설치되어 있다. 가상 센서는 이 센서의 측정 신호를 LTI-ROM에 입력하여 센서 설치가 불가능한 블레이드 선단(Tip)의 변위와 진동을 실시간으로 계산한다. 이러한 시스템을 실현하려면 DT는 절단 모듈의 설계 정보를 포함하고 있어야 하며 실시간 연산도 가능한 형태 이어야 한다.
따라서 설계 개선이 완료된 Pre-DT 모델은 실시간성을 갖춘 ROM으로 변환되어 설계 단계의 Type 모델이 운영 단계의 Instance 모델로 전환되도록 한다.
ROM의 생성 절차는 다음과 같다. 설계 개선이 완료된 Full-order의 FE 모델에서 모달 해석을 수행한 뒤 Craig-Bampton (CB) 법으로 주요 모드를 추출한 뒤 시스템 행렬을 축소한다. CB는 고유모드와 경계조건을 결합하여 고차원의 모델을 저차원의 모드 집합으로 축소하는 방법이다. MLCC 절단 공정은 절단면과 블레이드의 접촉 시 발생하는 마찰로 인한 구조 비선 형성이 존재한다. 그러나 MLCC의 절단 품질은 절단부의 접촉 비선형성보다는 절단 모듈의 전체적인 동강성(Dynamic Stiffness)과 공진 여부에 보다 지배적인 영향을 받는다. 따라서 시스템의 동특성을 일정 수준 유지하면서도 실시간성이 보장되는 LTI 모델을 적용하였다.
모달 해석은 총 15개의 모드를 포함하며, 누적 유효 질량비(Cumulative Effective Mass Fraction)는 98% 이상으로 확보하여 모드 절단(Mode Truncation)으로 인한 오차를 최소화하여 FOM의 동적 특성을 유지하도록 하였다. 축소된 모델은 Ansys Twin Builder에서 LTI-ROM으로 구현되었다.
Table 1과 같이, LTI-ROM을 활용할 경우X/Y/Z 3개 축에 대한 FRF 연산과 과도해석(Transient Analysis)을 포함한 계산 시간은 0.47 s로 측정되었다. 반면, Full-order FE 모델의 경우 Intel Xeon Gold 622R CPU @ 2.9 GHz (4 cores) 및 RAM 128 GB 환경에서 동일 조건의 해석을 모두 수행하는데 총 8,648 s가 소요되었다.
LTI-ROM의 신뢰성을 검증하기 위해 Full-Order FE 모델을 통해 얻은 FRF 결과와 비교하였다.
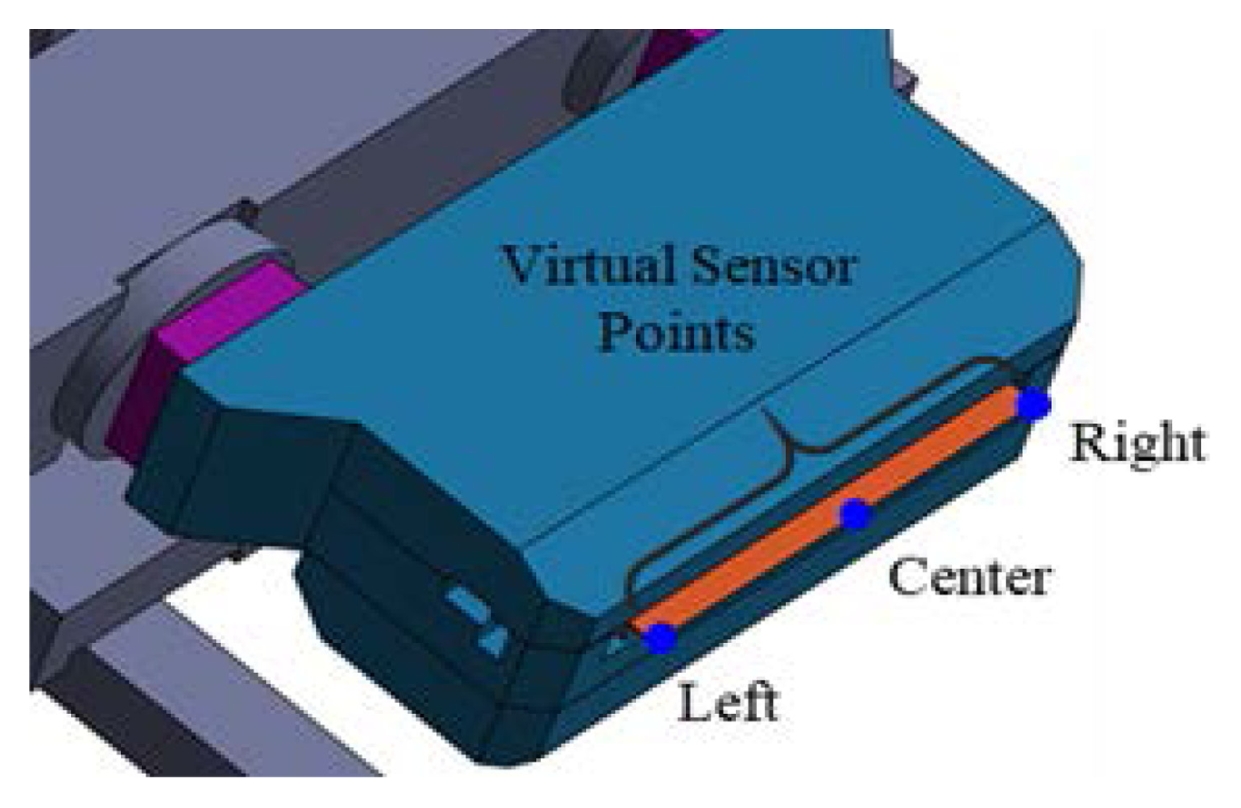
Fig. 12는 블레이드 선단부 3개 지점에서 수행된 LTI-ROM 기반 FRF 계산 위치를 나타낸다.
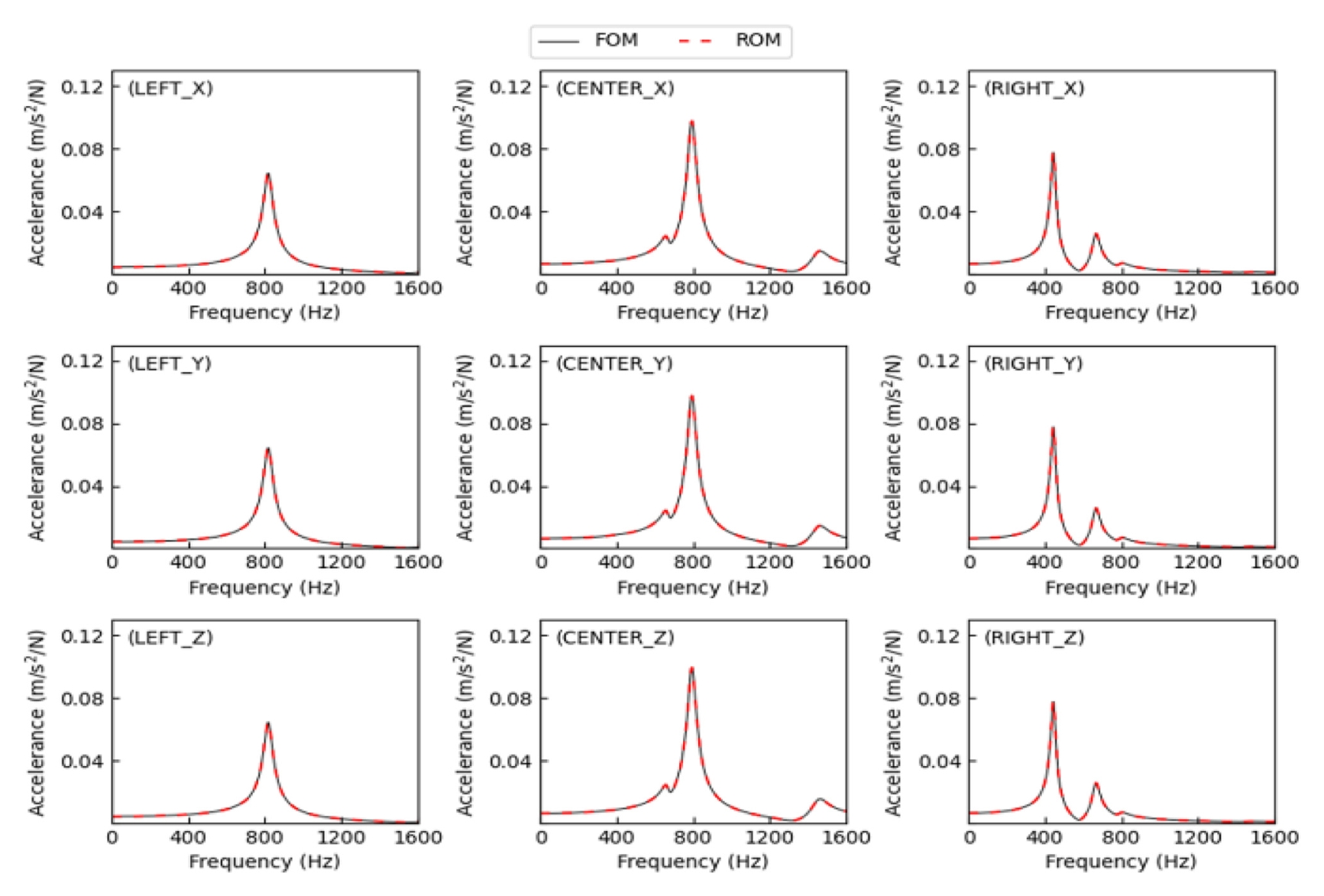
Fig. 13에서 흑색 실선은 FOM의 FRF 해석 결과를, 적색 점선은 LTI-ROM의 계산 결과를 각각 나타낸다. LTI-ROM의 예측값은 FEM 결과와 최대 오차율 1.3% 이하로 일치하였다(
Table 1). 결과적으로, 구축된 ROM은 물리적 거동을 충실히 보존하고 있으며, 운영 단계에서 가상 센서로 활용되기에 충분한 신뢰성을 갖는다는 것을 시사한다.
3.4 운영단계의 가상센서 활용
LTI-ROM 기반 가상센서는 실제 MLCC 양산 공정에서 공정 최적화와 품질 예측에 활용될 수 있다. 개발 단계에서는 정합성이 확보된 Pre-DT를 기반으로 설계 개선과 최적화를 수행하고, 이를 LTI-ROM으로 경량화하여 운영 단계의 실제 설비에 이식한다. 운영 단계에서는 이 ROM을 통해 가상센서 기반 실시간 해석과 성능 예측이 가능해진다. 이를 통해 기존에 설계-운영 단계가 단절되어 실시간 상태량을 추정할 수 없었던 구조적 한계를 해결할 수 있다.
첫째, 양산에서 생산성과 품질을 고려한 공정 최적화에 활용한 사례이다. 기존에는 엔지니어의 경험이나 시행착오(Try & Error) 방식으로 절단 속도를 설정하였다. 그러나 생산성 향상을 위해 절단 속도를 높일 수 있으나, 블레이드 진동이 증가하여 품질 한계에 도달하게 된다. 본 사례에서는 가상 공간에 속도 프로파일을 입력하여 블레이드 끝단의 X/Y/Z 진동량을 사전에 예측할 수 있었다.
Fig. 14는 절단 속도에 따른 예측된 X/Y/Z 진동량을 나타낸다.
이처럼 DT의 가상센서를 통해 진동이 품질 허용치 이내인 최대 속도를 예측하여 생산성을 극대화할 수 있다. 나아가 검증되지 않은 설비 공정 조건을 바로 적용하는 것이 아니라 DT 환경을 통해 가상 테스트를 수행함으로써, 실제 설비를 보호하는 효과도 얻을 수 있다.
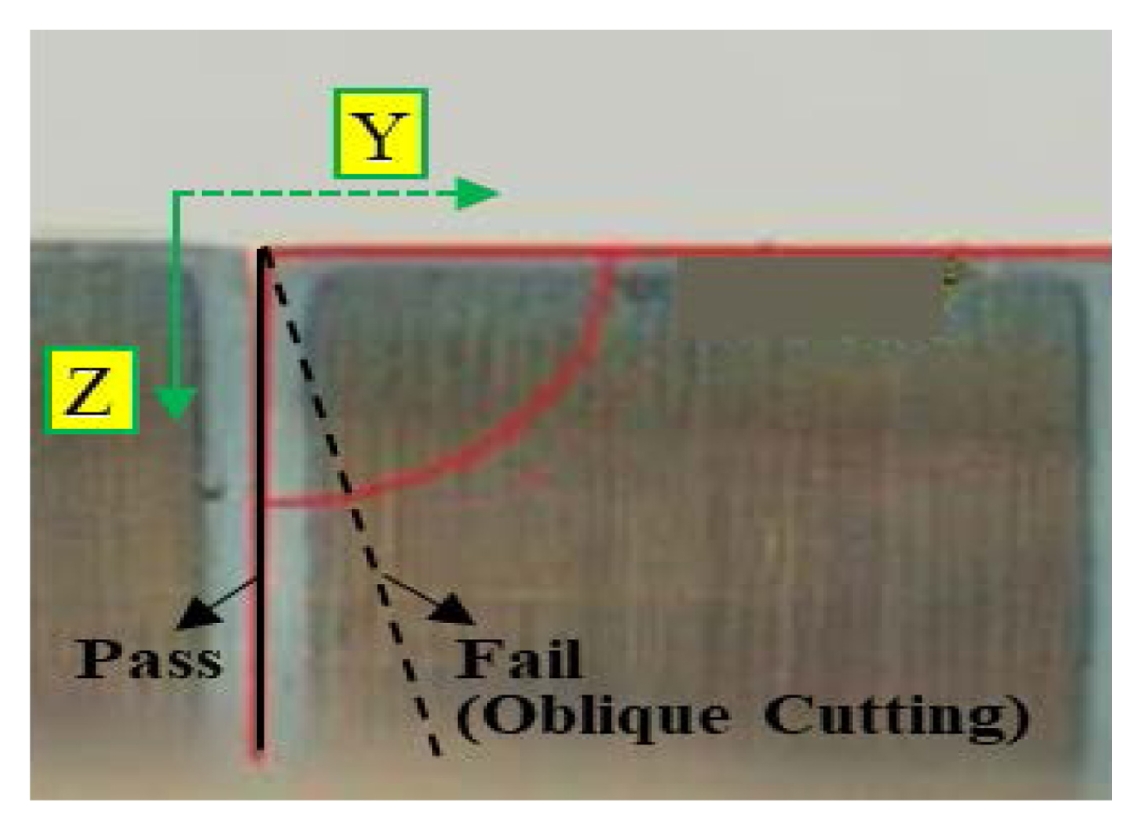
둘째, 제품 기종 변경에 따른 품질 편차에 대한 사전 대응이다. MLCC는 기종별로 유전체의 재료 물성(경도, 두께 등)이 다르므로 절단 시 발생하는 반발력 특성이 상이하다.
Fig. 15는 불량의 한 유형인 칩의 치수 불량이며, 블레이드가 횡방향(Y축)으로 밀리는 사선 절단(Oblique Cutting) 현상을 보여준다. 이 때 제안된 가상센서는 실제 절단력 신호를 입력 받아 블레이드의 횡방향 변위를 실시간으로 추정할 수 있다.
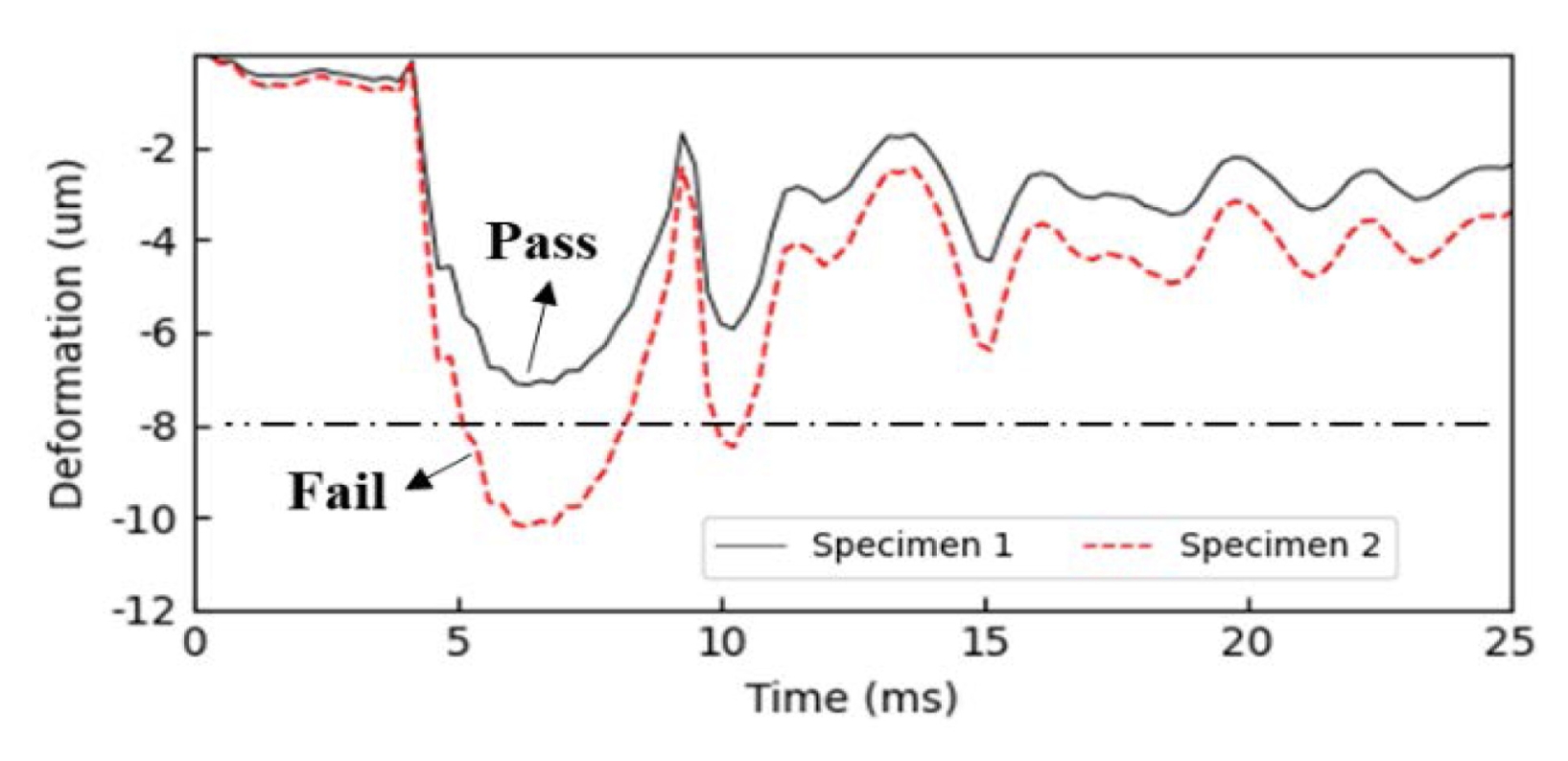
Fig. 16은 시간에 따른 블레이드의 횡방향 변위를 예측한 값이다. 신규 MLCC 기종(Specimen 2)을 절단할 때 횡방향의 변위가 공정 요구 조건을 벗어남을 가상공간에서 예측하여 보여준다. 이를 통해 새로운 기종 투입 시 예상되는 사선 절단 편차를 정량적으로 파악하고 공정 조건(속도, 진입 각도 등)을 선제적으로 보정함으로써, 셋업 시간을 단축하고 절단 품질의 일관성을 확보할 수 있다.
4. 결론
제조 설비의 개발부터 운영까지의 모든 생애주기에서 일관된 FE 모델을 활용 가능하도록 LTI-ROM 기반의 디지털 트윈 구축 방법을 제시하였고 MLCC 절단 설비에 적용해 그 효과를 검증하였다. 특히 Pre-DT를 통한 설계개선과 가상센서를 활용한 절단속도 및 품질 편차 예측을 통해 제조 현장에서 요구하는 생산 효율성과 품질 확보를 달성할 수 있도록 하였다. 이번 연구는 그동안 설계와 운영단계에서 FE 모델이 단절되어 발생했던 한계를 극복하고, CAE 모델의 재활용성을 높였다는 점에서 의의가 있다.
첫째, RAMI 4.0의 Type-Instance 개념을 이용하여 기획, 설계 단계에서 개발된 FE 모델(Type)을 운영 단계에서도 활용하기 위하여 계산 효율성이 높은 LTI-ROM (Instance)을 도입하였다. 둘째, Pre-DT는 이전 세대에서 축적된 모델 자산과 데이터를 차세대 설비의 설계 검증에 활용하였다. 즉, 설계 모델이 운영 단계의 의사결정 모델로 연결되는 개발 프로세스를 제시하였다. 셋째, LTI-ROM을 활용한 가상센서는 설비 운영단계의 관측 가능성을 확장하였다. 가상센서는 물리적인 센서로 측정이 불가능한 설비 내부의 거동을 실시간으로 예측하도록 하여 상태 진단과 예측을 가능하게 하였다.
본 연구의 한계는 다음과 같다. 첫째, 본 연구의 LTI 모델은 선형성을 가지고 있으므로 DT 구축 대상의 거동에 비선형성이 클 경우 정확도가 감소할 수 있다.
둘째, LTI-ROM을 통해 Instance 모델로 전환된 후 설비의 열화나 노후로 인한 상태를 반영하지 못해 시간이 지날수록 DT와 실제 설비 간의 오차가 증가할 수 있다.
향후 연구에서는 LTI 모델이 갖는 선형 가정의 한계를 극복하기 위해, 접촉이나 마찰 등 비선형 거동을 효율적으로 처리하는 비선형 ROM 확장 기법에 대한 연구가 필요하다.
또한, 설비의 장기 운영에 따른 열화나 노화현상을 반영하기 위하여 ROM 파라미터를 실시간으로 보정하는 AI 기반 모델 적응(Model Adaptation) 알고리즘을 개발하는 연구가 필요하다. 이를 통해 DT의 예측 성능을 향상시키는 방향으로 추가적인 연구를 진행할 예정이다.
FOOTNOTES
-
ACKNOWLEDGEMENT
이 논문은 2026년 산업통상자원부 및 한국산업기술기획평가원(KEIT) 연구비 지원에 의한 연구임(No. RS-2024-00419010, 산업기술알키미스트프로젝트사업).
Fig. 1Structure of the RAMI 4.0 framework
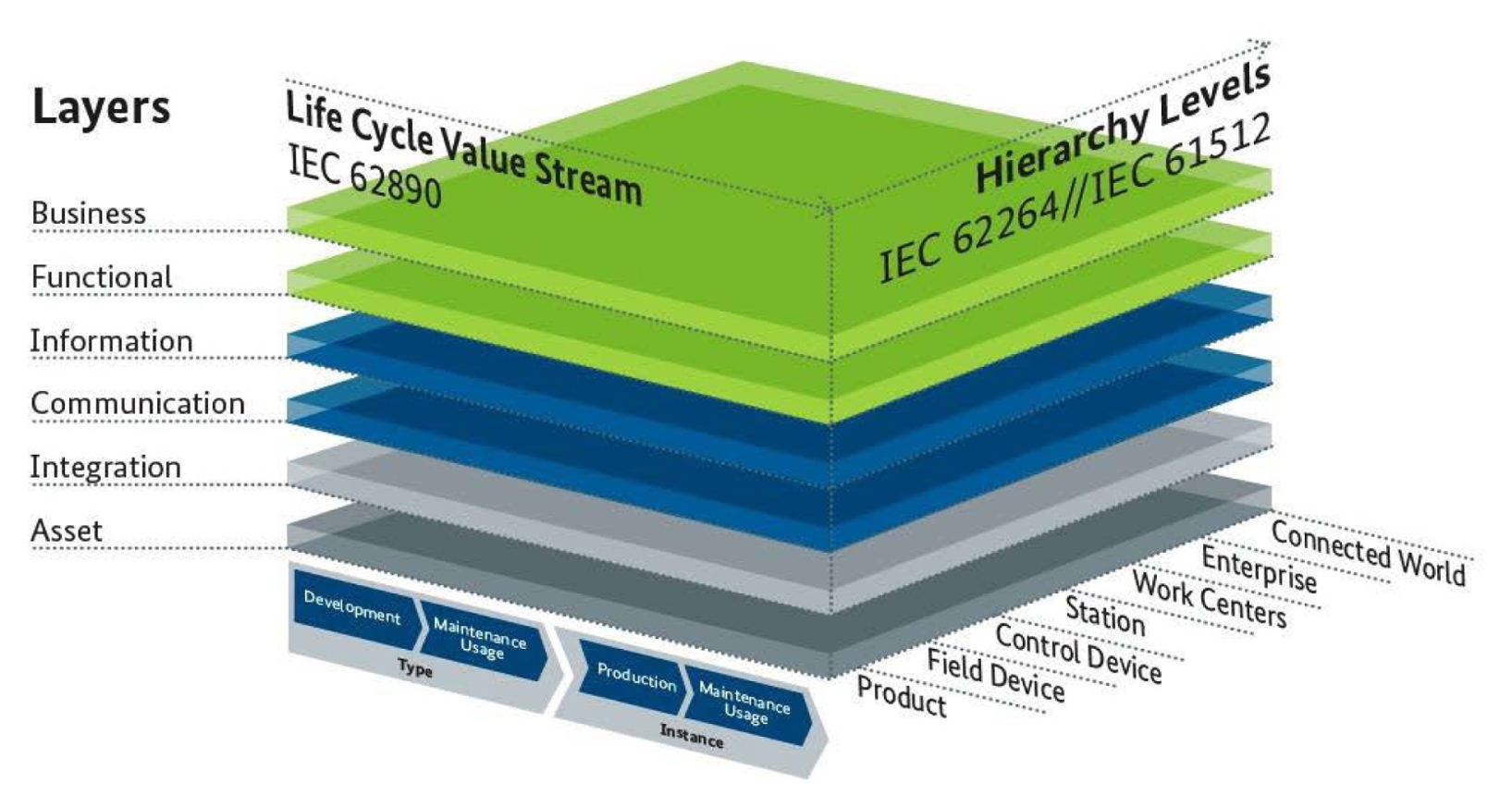
Fig. 2Digital twin-based equipment development process
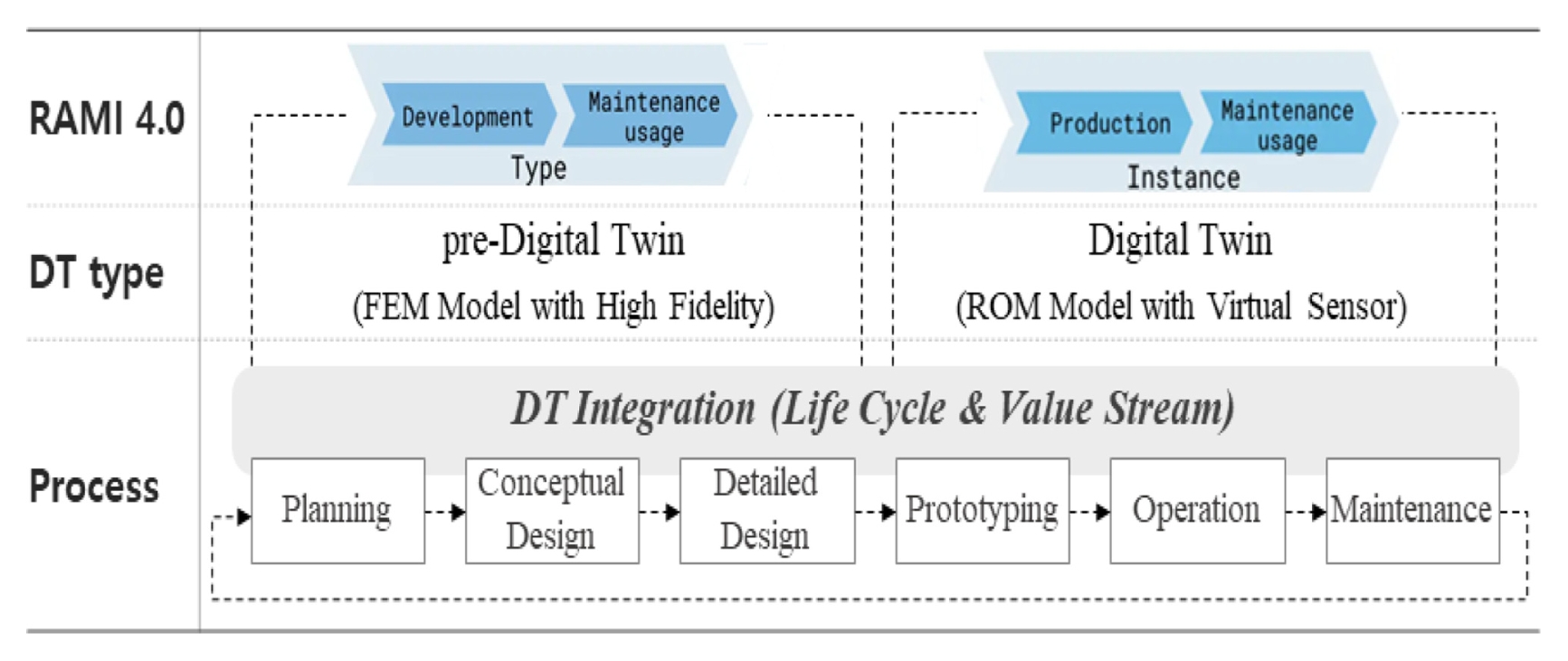
Fig. 3Workflows between LTI-ROM and POD-ROM
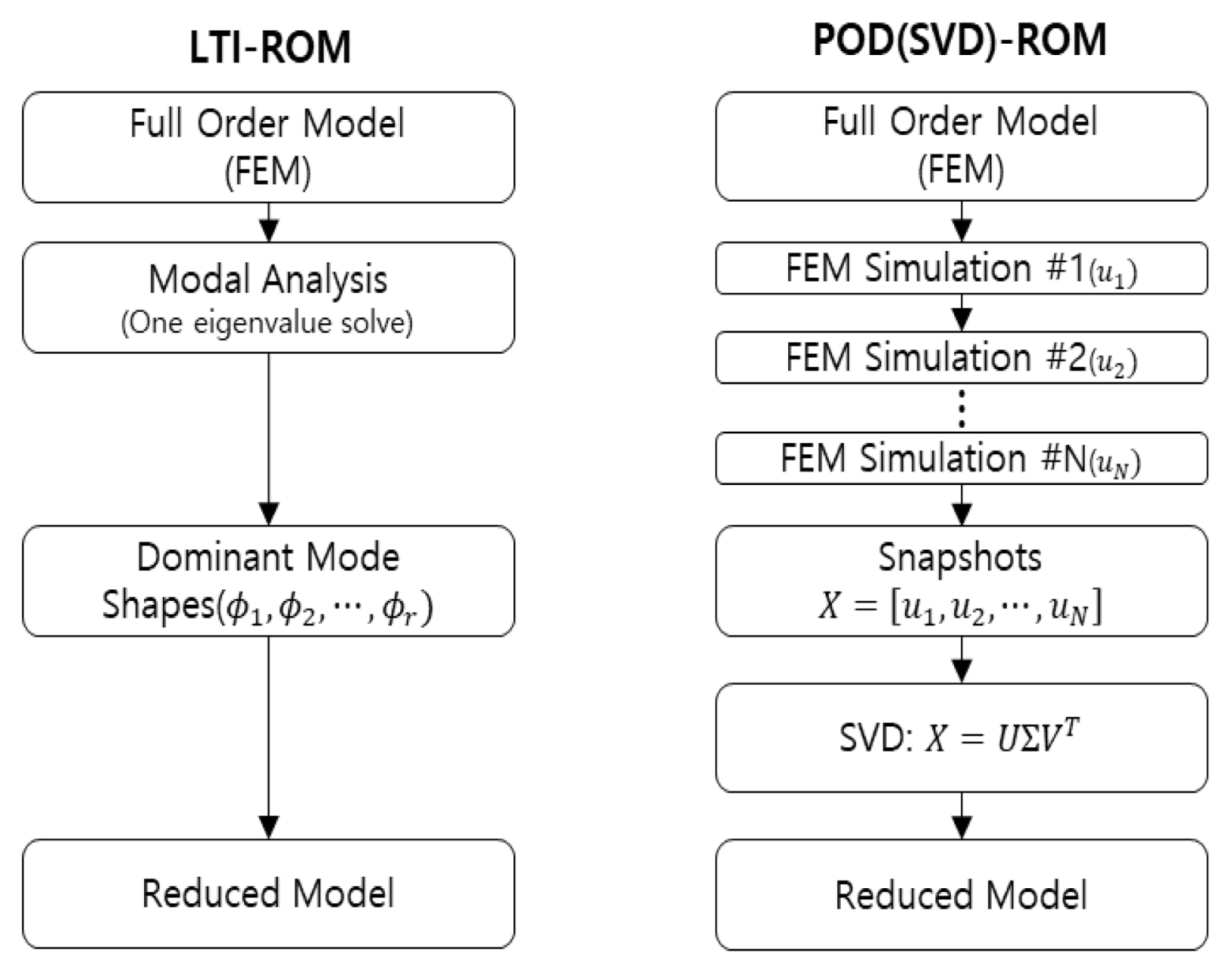
Fig. 4MLCC Cutting Machine (Xiamen Sinuowei CTL-501) [
16] (Adapted from Ref.
16 on the basis of OA)

Fig. 5Full-order FE model of MLCC cutting equipment
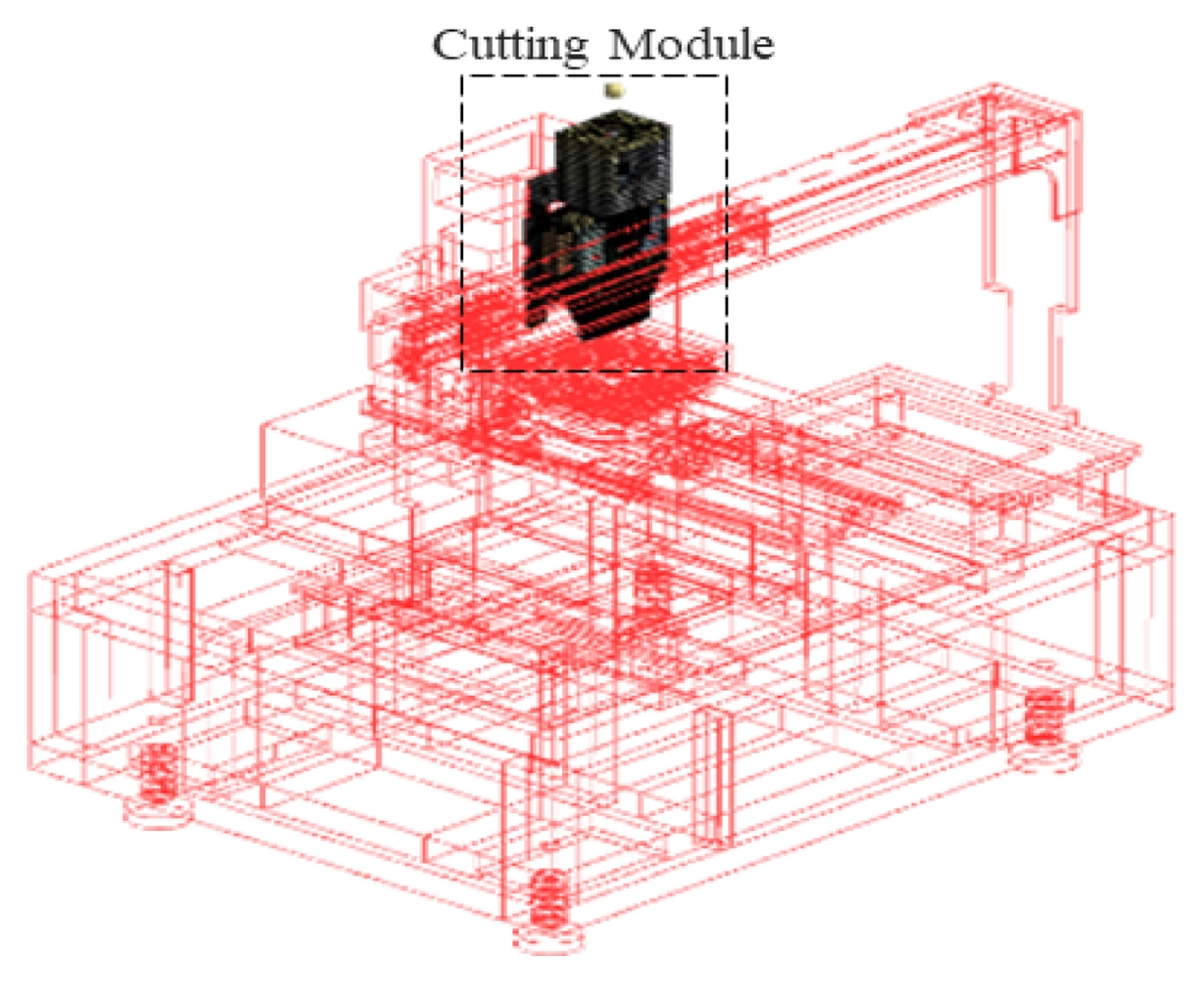
Fig. 6Correlation between FEM simulation and measured FRF data
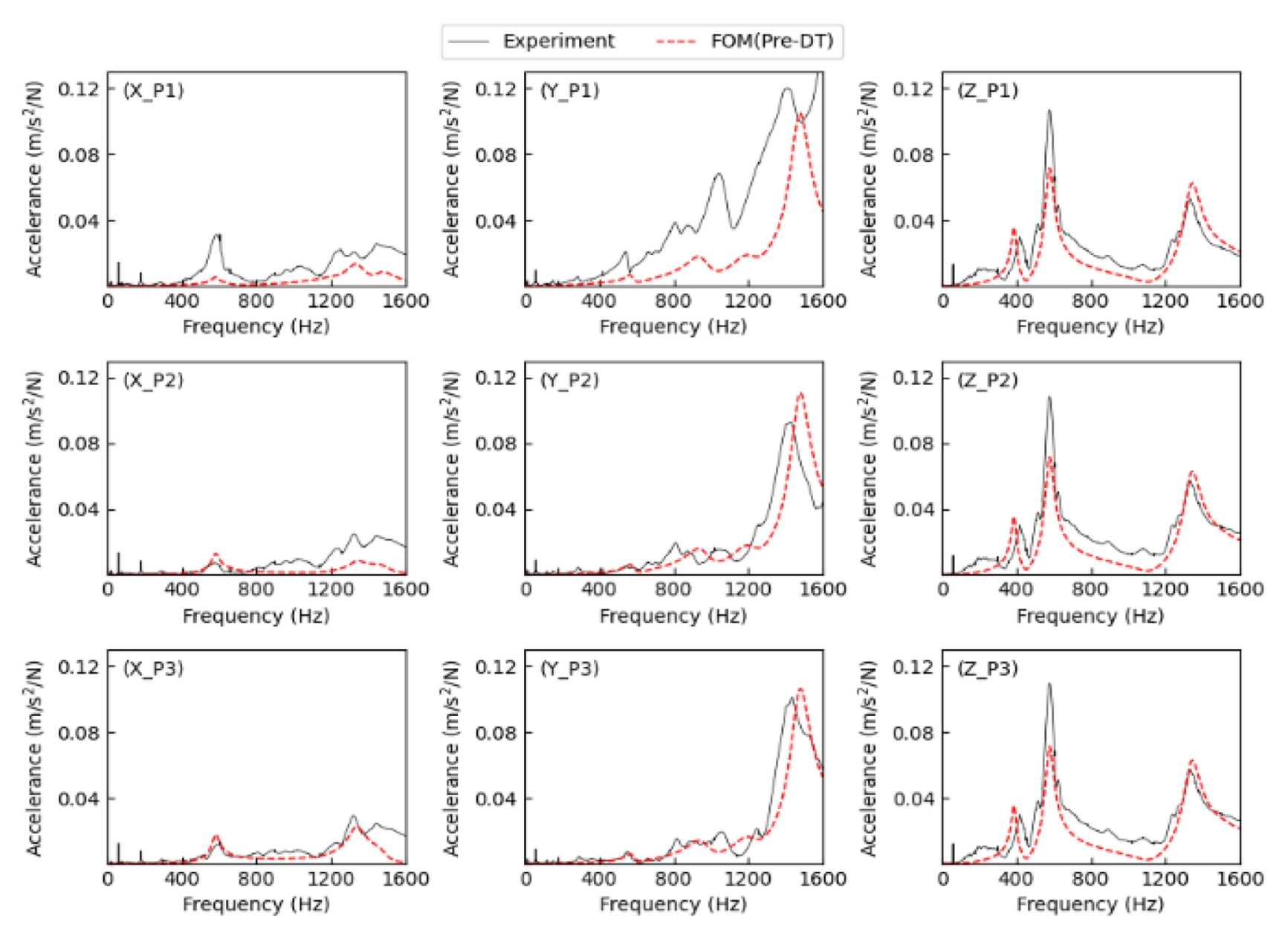
Fig. 7Vibration signals at cutting failure on MLCC cutting equipment
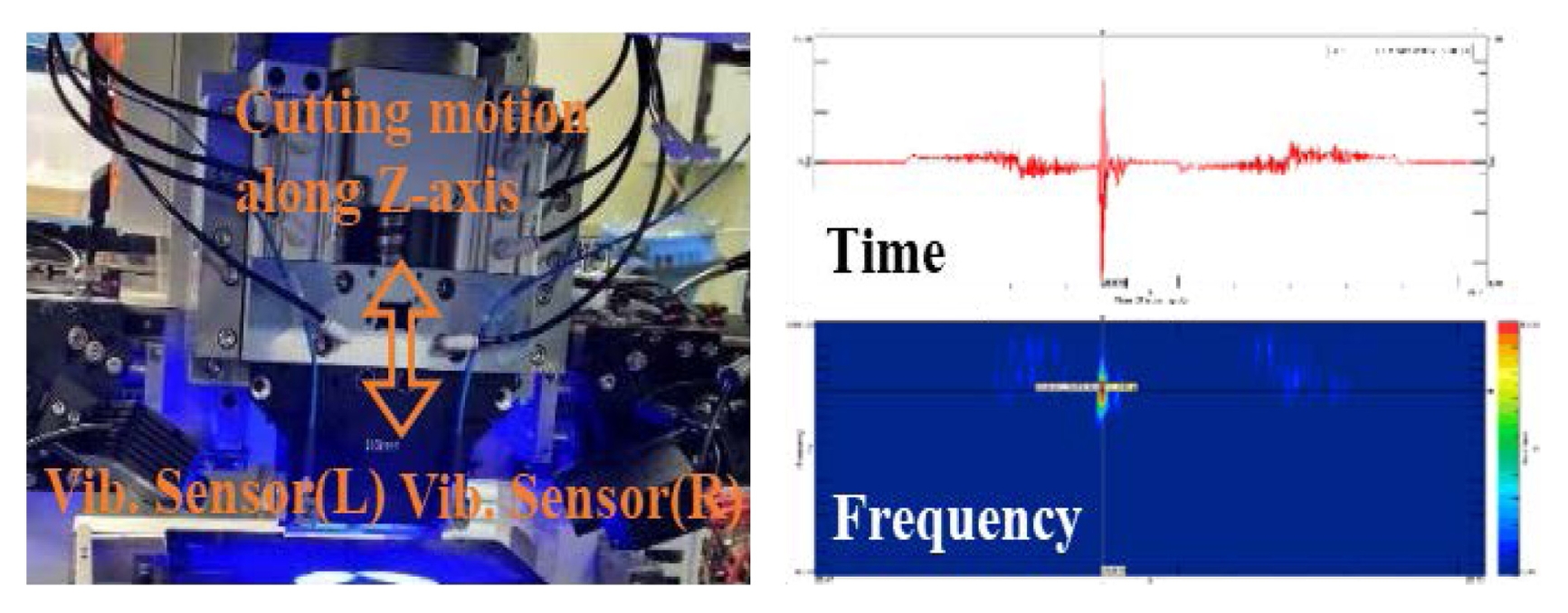
Fig. 8Identification of critical modes using Pre-DT
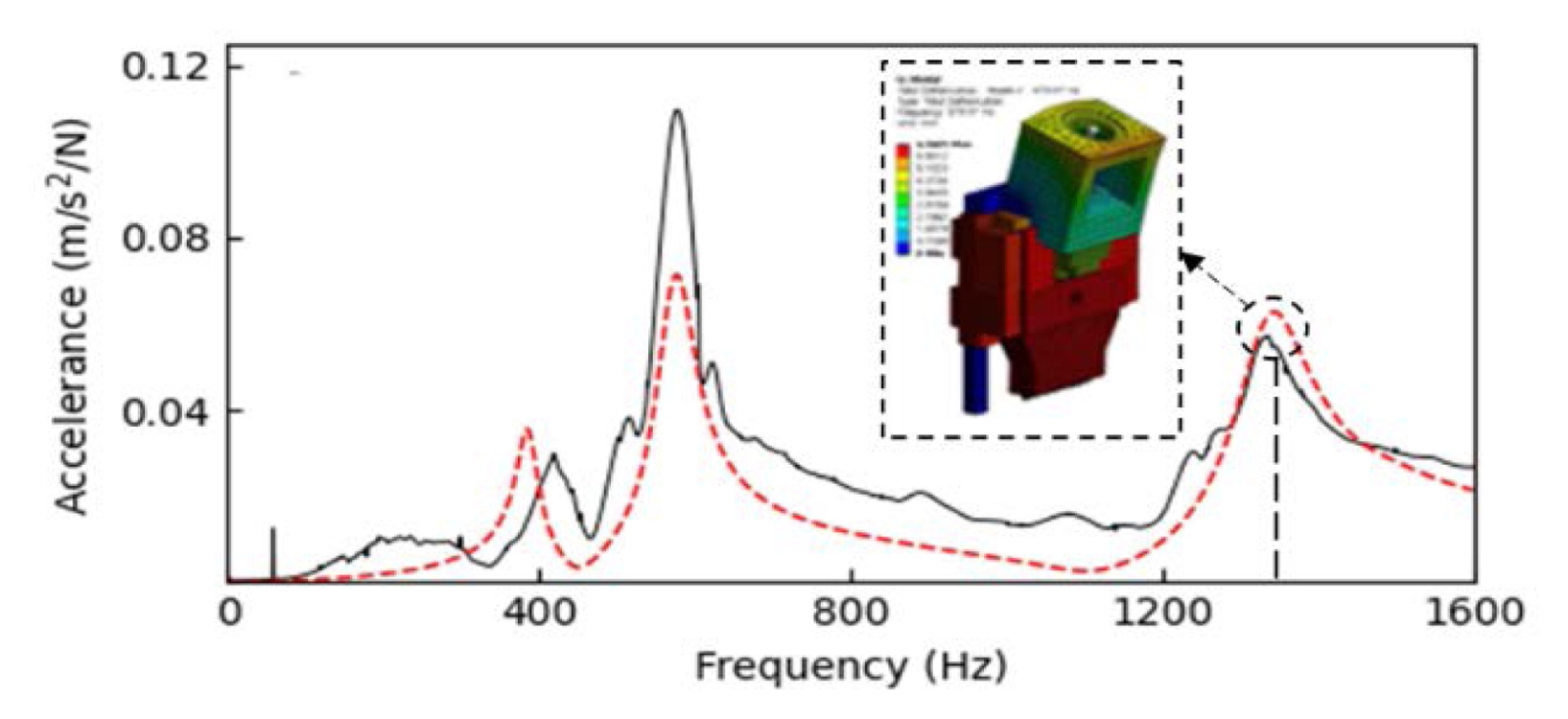
Fig. 9Structural design modifications for resonance avoidance
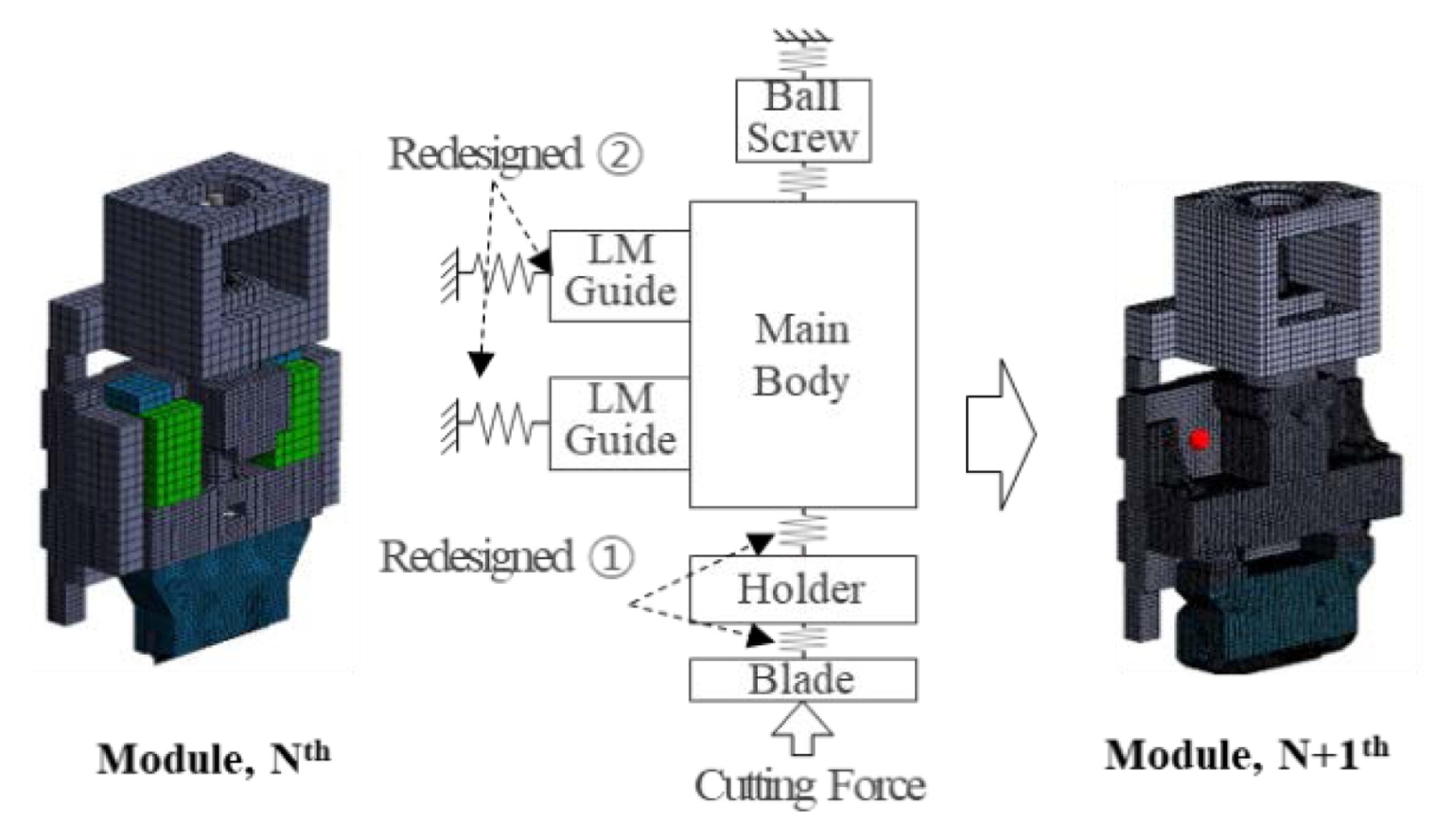
Fig. 10Verification of dynamic stiffness improvement in Pre-DT
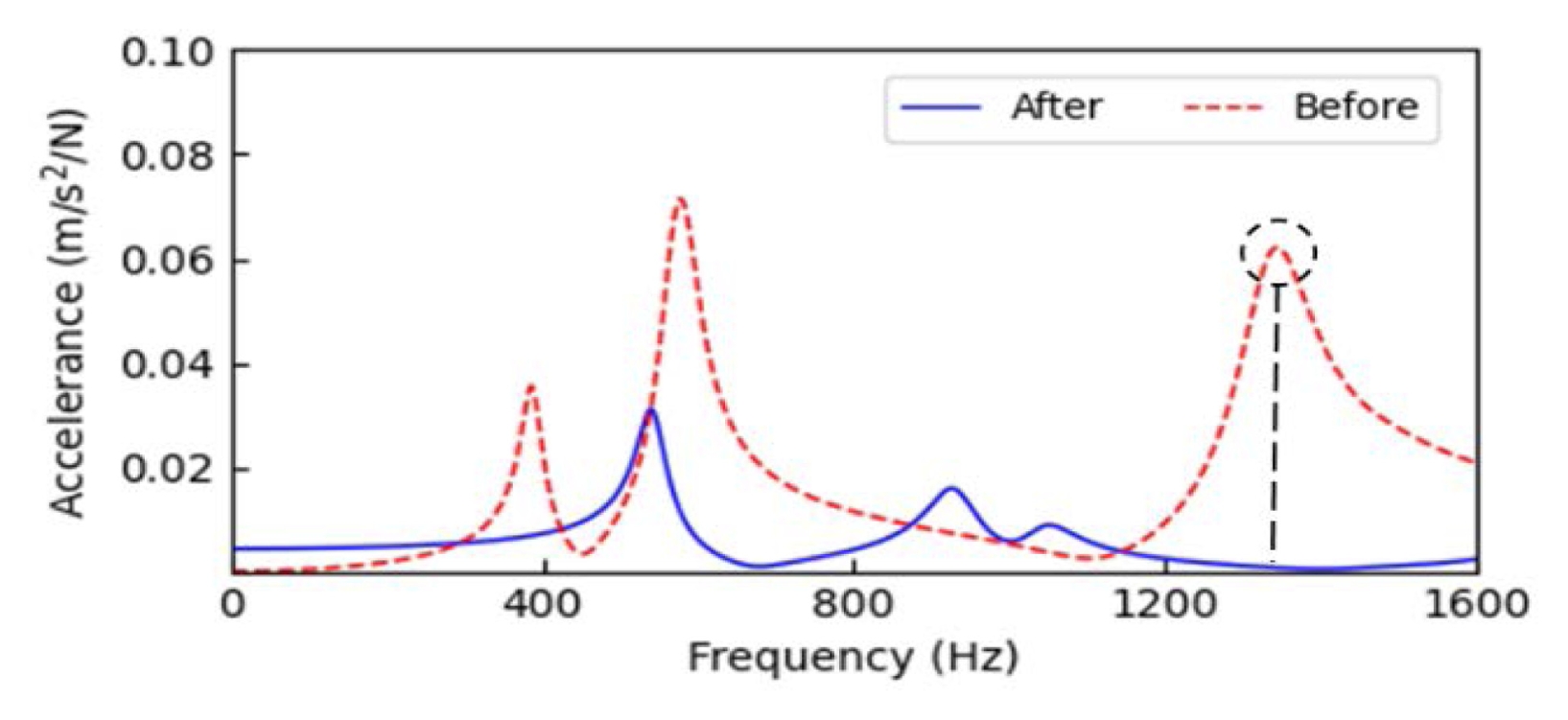
Fig. 11Schematic diagram of virtual sensor system
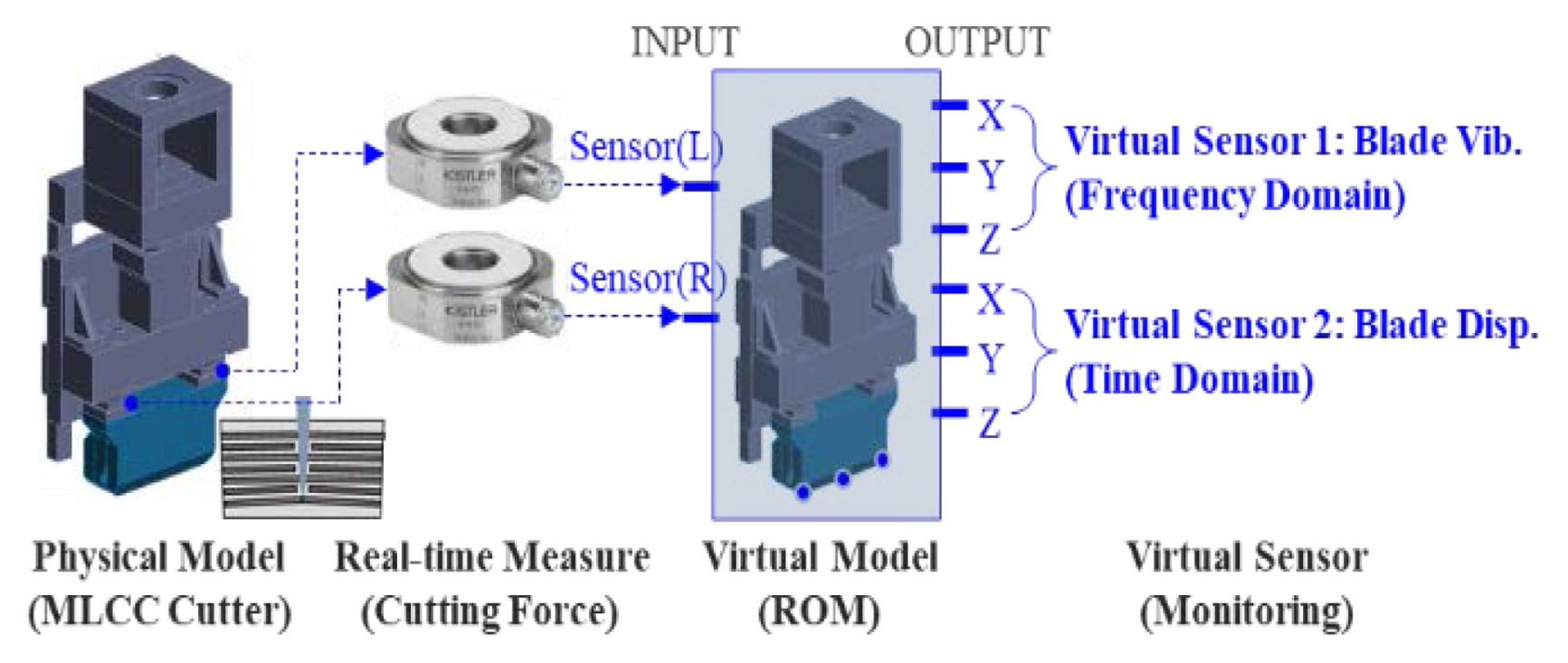
Fig. 12Blade-tip locations for FRF in the LTI-ROM
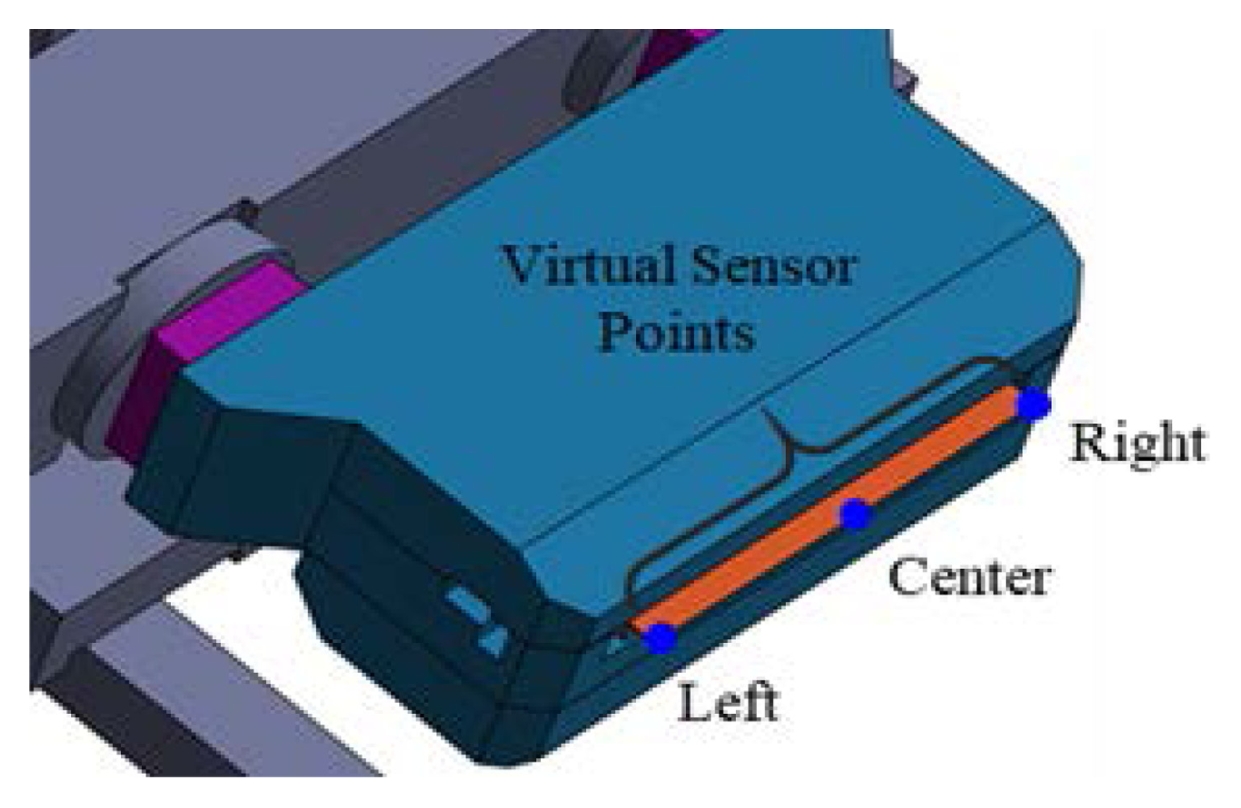
Fig. 13Validation of accuracy between full-order FE model and the proposed LTI-ROM
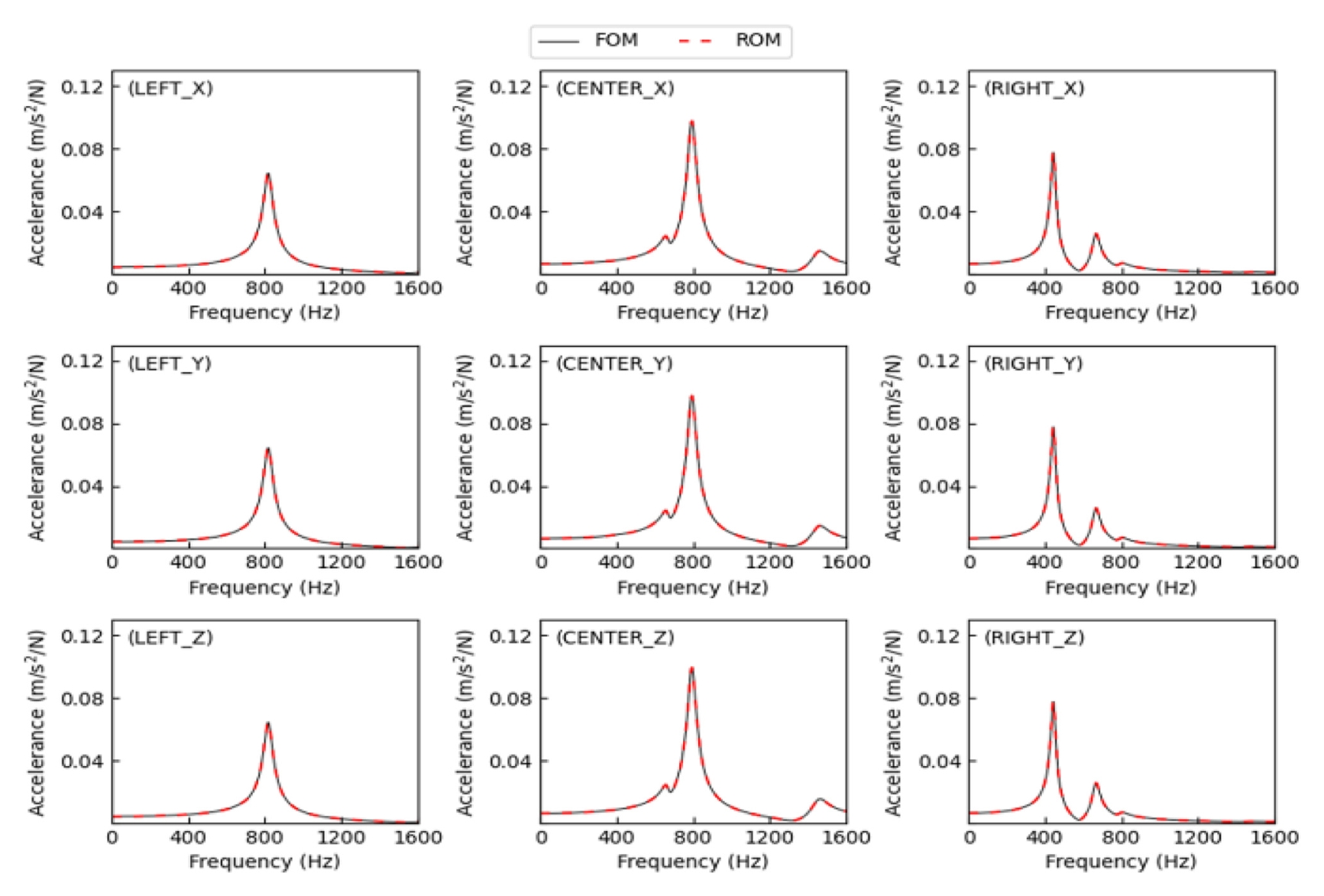
Fig. 14Virtual testing of blade vibration under various cutting speeds
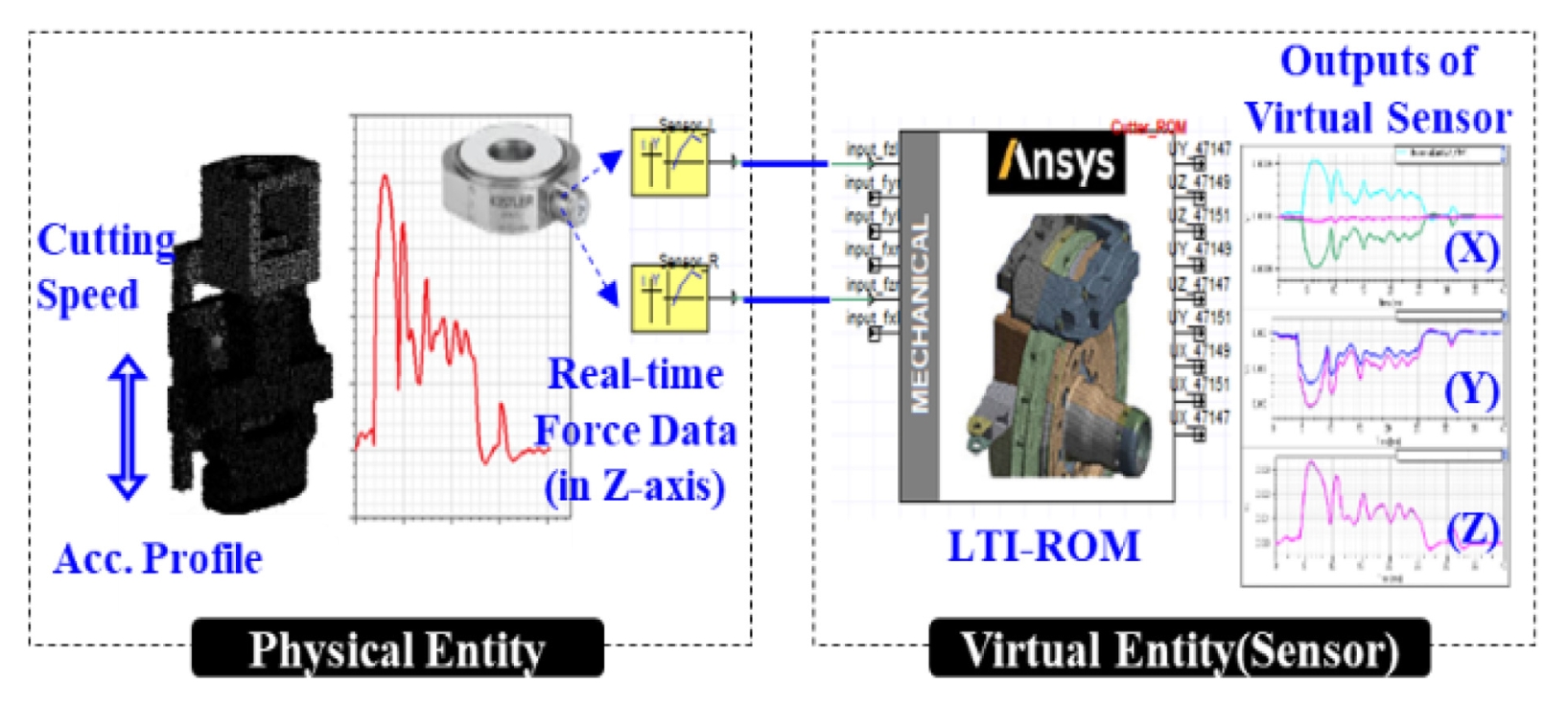
Fig. 15Oblique cutting defect by blade deformation
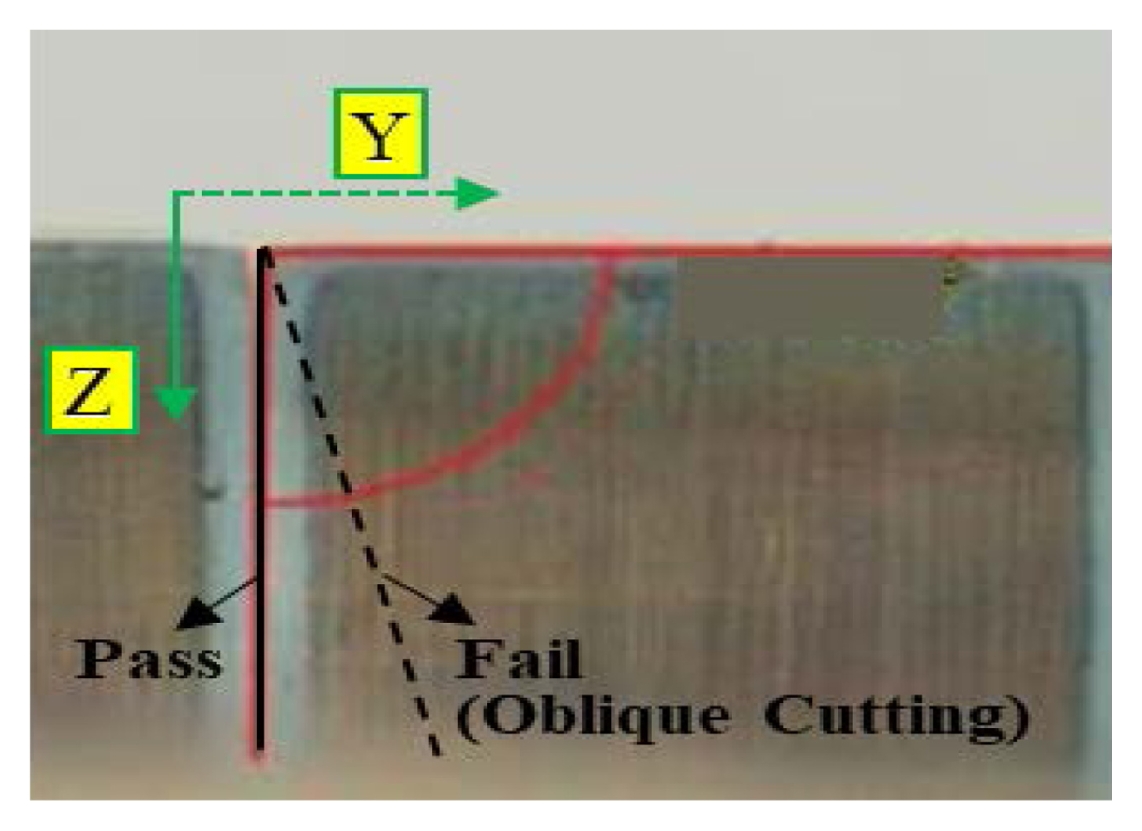
Fig. 16Virtual testing of oblique cutting for MLCC different product types
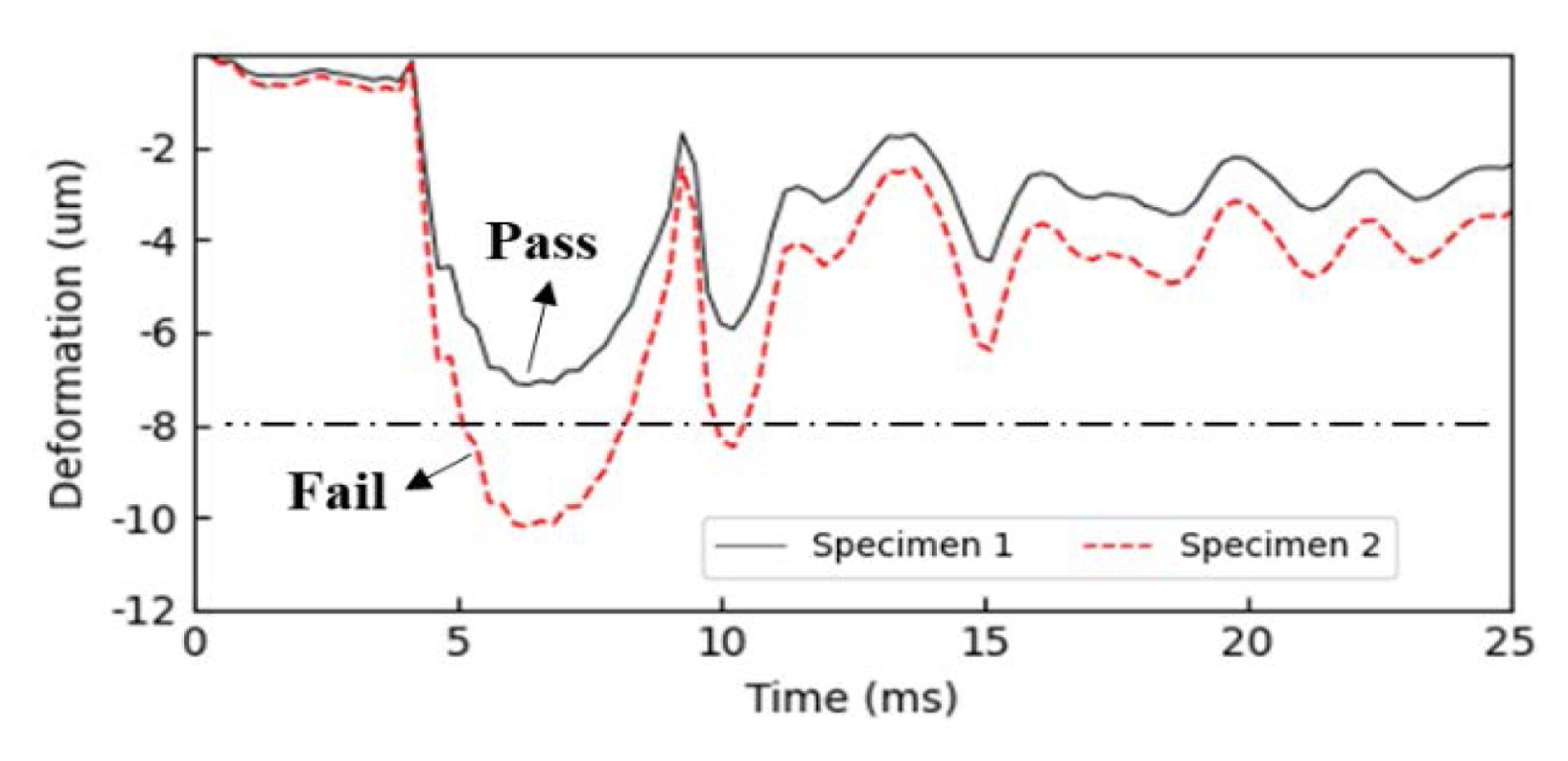
Table 1Performance of the LTI-ROM
Table 1
|
|
FOM |
LTI-ROM |
|
Max. error [%] |
– |
≤ 1.3 |
|
Computation time [sec] |
Modal |
471 |
0.47 |
|
FRF(X) |
1,765 |
|
|
FRF(Y) |
1,699 |
|
|
FRF(Z) |
1,765 |
|
|
Transient |
2,948 |
|
REFERENCES
- 1. Pronost, G., Mayer, F., Camargo, M., Dupont, L., (2024), Digital twins along the product lifecycle: A systematic literature review of applications in manufacturing, Digital Twin, 3(3), 1-31.
- 2. Florescu, A., (2024), Digital twin for flexible manufacturing systems and optimization through simulation: A case study, Machines, 12(11), 785.
- 3. Poddar, S., Sanikal, V., Thakare, S., Sharma, N., (2025), Mechanical engineering integrity in Industry 4.0 & cybersecurity protocols for CAE-based digital twins, International Research Journal of Engineering and Technology (IRJET), 12(3), 918-923.
- 4. Grieves, M., Vickers, J., (2017), Digital twin: Mitigating unpredictable, undesirable emergent behavior in complex systems. Transdisciplinary Perspectives on Complex Systems. Springer.
- 5. Tao, F., Sui, F., Liu, A., Qi, Q., Zhang, M., Song, B., Guo, Z., Lu, S.C.-Y, Nee, AY, (2019), Digital twin-driven product design framework, International Journal of Production Research, 57(12), 3935-3953.
- 6. Cui, Z., Yang, X., Yue, J., Liu, X., Tao, W., Xia, Q., Wu, C., (2023), A review of digital twin technology for electromechanical products: Evolution focus throughout key lifecycle phases, Journal of Manufacturing Systems, 70, 264-287.
- 7. Ritto, T., Rochinha, F., (2021), Digital twin, physics-based model, and machine learning applied to damage detection in structures, Mechanical Systems and Signal Processing, 155, 107614.
- 8. Zhang, J., Wang, Z., Li, S., Wei, P., (2024), A digital twin approach for gas turbine performance based on deep multi-model fusion, Applied Thermal Engineering, 246, 122954.
- 9. Luo, W., Hu, T., Ye, Y., Zhang, C., Wei, Y., (2020), A hybrid predictive maintenance approach for CNC machine tool driven by digital twin, Robotics and Computer-Integrated Manufacturing, 65, 101974.
- 10. Aivaliotis, P., Georgoulias, K., Arkouli, Z., Makris, S., (2019), Methodology for enabling digital twin using advanced physics-based modelling in predictive maintenance, Procedia CIRP, 81, 417-422.
- 11. Lee, J., Bagheri, B., Jin, C., (2016), Introduction to cyber manufacturing, Manufacturing Letters, 8, 11-15.
- 12. Wang, Y., Zhao, X., (2025), A digital twin dynamic migration method for industrial mobile robots, Robotics and Computer-Integrated Manufacturing, 92, 102864.
- 13. Zeng, X., Ping, X., Zhao, H., Zhao, Q., (2025), A digital twin framework for predicting the equivalent elastic modulus of tungsten carbide coating, Ceramics International, 51(18), 26266-26279.
- 14. Kannapinn, M., Pham, M. K., Schäfer, M., (2022), Physics-based digital twins for autonomous thermal food processing: Efficient, non-intrusive reduced-order modeling, Innovative Food Science & Emerging Technologies, 81, 103143.
- 15. Platform Industrie 4.0, (2018), Reference architecture model industrie 4.0 (RAMI 4.0). Federal Ministry for Economic Affairs and Energy (BMWi); https://www.plattform-i40.de/IP/Redaktion/EN/Downloads/Publikation/rami40-an-introduction.html
- 16. Wei Sinuo. Automatic MLCC capacitor cutting machine. https://www.xmsinuowei.com/automatic-mlcc-capacitor-cutting-machinemulti-layer-ceramic-capacitors-cutting-machine_p132.html.
Biography
- Sung-Wook Park
Ph.D. candidate in the Graduate School of Technology & Innovation Management, Hanyang University. His research interests are digital twin and smart factory.
- Seung-Jun Shin
Professor in the School of Interdisciplinary Industrial Studies, Hanyang University. His research interests are autonomous manufacturing, manufacturing AI, environmentally conscious manufacturing and industrial data interoperability.