1 충남연구원 과학기술진흥본부
1 Division of Science and Technology Promotion, Chungnam Institute
Copyright © The Korean Society for Precision Engineering
This is an Open-Access article distributed under the terms of the Creative Commons Attribution Non-Commercial License (http://creativecommons.org/licenses/by-nc/3.0) which permits unrestricted non-commercial use, distribution, and reproduction in any medium, provided the original work is properly cited.
| Type | Items | Appearance | Research institute (Year) | |
|---|---|---|---|---|
|
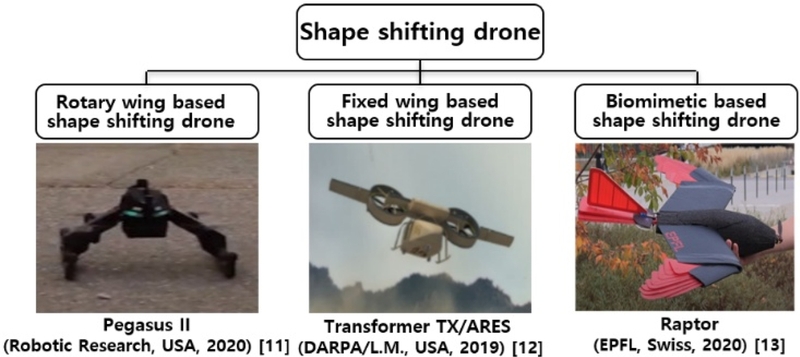
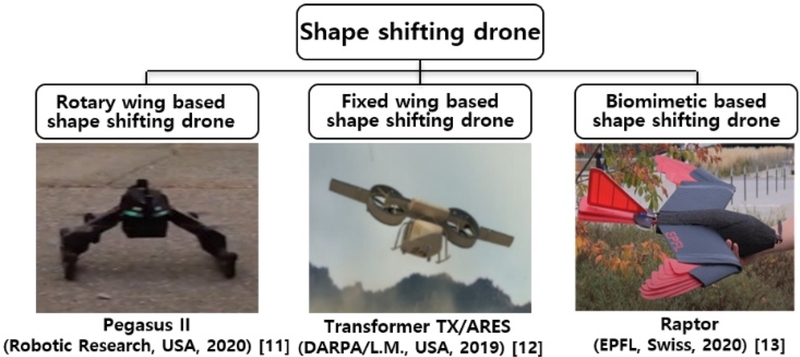
Rotary wing based shape shifting drone |
Self-shape shifting | Reconfigurable drone [14] |

|
UC. berkeley (2022) |
| Shape morphing drone [8] |

|
Virginia Tech. (2022) | ||
| Pegasus-II [11] |

|
Robotic research Co. (2020) | ||
| Morphing quadrotor [49] |
|
Univ. of Washington (2018) | ||
| Small hybrid ground-air vehicle [19] |

|
Univ. of Minnesota (2017) | ||
| - [50] |
Shape memory plastic development for shape shifting drone (article) |
Army research lab. (2020) | ||
| M4 [20] |

|
Caltech (2023) | ||
| Separation/ combining | Shape-shifter [21] |

|
NASA (2019) | |
| Mega-drone [26] |

|
Amazon Co. (2016) | ||
| Type | Items | Appearance | Research institute (Year) | |
|---|---|---|---|---|
|
Fixed wing based shape shifting drone |
Self-shape shifting |
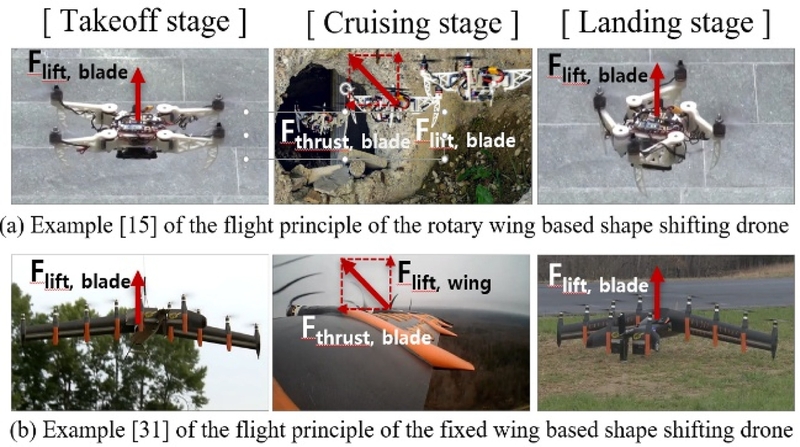
GL-10 [31] |

|
NASA (2014) |
| Transformer TX (ARES) [12] |

|
DARPA (2019) | ||
| Transwing [32] |

|
PteroDynamics co. (2019) | ||
| MIST-UAV [33] |

|
Minnesota Univ. (2019) | ||
|
Separation/ combining |
UAV and quarcopter [29] |

|
Florida Tech. (2021) | |
|
Biomimetic wing based shape shifting drone |
Self-shape shifting |
BatBot [43] |

|
UIUC (2017) |
| Type | Items | Appearance | Research institute (Year) | |
|---|---|---|---|---|
|
Rotary wing based shape shifting drone |
Self-shape shifting |
Foldable drone [15] |

|
Univ. of Zurich (2018) |
| Omni-orientational hexacopter [51] |

|
Voliro Co./Univ. of Zurich (2018) | ||
| New inspection drone [52] |

|
EPFL/Elythor (2023) | ||
|
Fixed wing based shape shifting drone |
Self-shape shifting |
Tiltwing UAV [34] |

|
Univ. of Zurich (2019) |
| Paceflyer S100 [35] |

|
Univ. of Zurich (2016) | ||
|
Biomimetic wing based shape shifting drone |
Self-shape shifting |
Rapter [13] |

|
EPFL (2020) |
| A perching robot of griffin project [41] |

|
EPFL (2023) | ||
| Type | Items | Appearance | Research institute (Year) | |
|---|---|---|---|---|
|
Rotary wing based shape shifting drone |
Self-shape shifting |
Transform able multirotor [16] |

|
Univ. of Tokyo (2017) |
| Dragon [17] |

|
Univ. of Tokyo (2018) | ||
| SPIDAR [22] |

|
Univ. of Tokyo (2023) | ||
| Type | Items | Appearance | Research institute (Year) | |
|---|---|---|---|---|
|
Fixed wing based shape shifting drone |
Self-shape shifting |
Pheonix-2 eVTOL [53] |

|
Lilium Gmbh. (2022) |
|
Biomimetic wing based shape shifting drone |
Self-shape shifting |
BicnicFlyingFox [44] |

|
Festo Co., (2018) |
| BionicSwift [45] |

|
Festo Co., (2020) | ||
| Type | Items | Appearance | Research institute (Year) | |
|---|---|---|---|---|
|
Fixed wing based shape shifting drone |
Self-shape shifting |
Morphing UAV [54] |

|
Southampton Univ. (2018) |
|
Biomimetic wing based shape shifting drone |
Self-shape shifting |
SNAG [42] |

|
Stanford Univ. (2021) |
| AquaMAV [46] |

|
Imperial College London (2016) | ||
| Type | Items | Appearance | Research institute (Year) | |
|---|---|---|---|---|
| Rotary wing based shape shifting drone |
Self-shape shifting |
Morphing Quadcopter [18] |

|
Aix Marseille Univ. (France, 2018) |
| Fixed wing based shape shifting drone |
Self-shape shifting |
A3 Vahana [36] |

|
Airbus Co. (2018) |
| Type | Items | Appearance | Research institute (Year) | |
|---|---|---|---|---|
| Rotary wing based shape shifting drone | Self-shape shifting | Morphy [55] |

|
Norwegian Univ. of science and technology (Norway, 2024) |
| Separation/combining | Megskopter [27] |

|
Univ. of Oslo (Norway, 2015) | |
| Type | Items | Appearance | Research institute (Year) | |
|---|---|---|---|---|
|
Rotary wing based shape shifting drone |
Self-shape shifting | TJ-flyingfish [25] |

|
Tongji University (China, 2023) |
| Separation/combining | Air separation drone [56] |

|
Nanjing Univ. (China, 2024) | |
| Biomimetic wing based shape shifting drone | Self-shape shifting | Xiaosun [47] |

|
Northwestern Polytechnical Univ., (China, 2024) |
| Type | Items | Appearance | Research institute (Year) | |
|---|---|---|---|---|
|
Rotary wing based shape shifting drone |
Self-shape shifting |
FSTAR [23] |

|
The Ben Gurion Univ. of the Negev (Israel, 2019) |
| Elasticopter [24] |

|
IIIT-Hyderabad (India,2021) | ||
|
Separation/ combining |
Pop.up Next [57] |

|
Airbus &Audi Co. (Italia, 2018) | |
| DRA [28] |

|
Univ. of Sao Paulo (Brazil, 2020) | ||
|
Fixed wing based shape shifting drone |
Self-shape shifting |
U-Iion [37] |

|
National Univ. of Singapore (Singapore, 2017) |
| HADA [58] |

|
INTA (Spain, 2012) | ||
|
Separation/ combining |
Aerial refueling [59] |
|
Univ. of Sydney (Australia, 2006) | |
| Type | Items | Appearance | Research institute (Year) | |
|---|---|---|---|---|
|
Rotary wing based shape shifting drone |
Self-shape shifting |
Life-saving drone with variable structure [60] |

|
Sangmyung Univ. (2021) |
| Propeller allocation reconfigurable drone [61] |

|
KARI (2015) | ||
| Payload with variable stiffiiess mechanism applied drone [62] |

|
Seoul National Univ. (2018) | ||
|
Separation/ combining |
Aerial manipulation drone using multiple drone [63] |

|
Seoul National Univ. (2017) | |
| A drone with connector for combining with mobile robot [64] |

|
Chungnam National Univ. (2018) | ||
| Mother-child drone using magnetic force [65] |

|
Uconsystem Co., Ltd., (2016) | ||
|
Fixed wing based shape shifting drone |
Self-shape shifting |
Unmanned Vehicle for air/ground/water environment [66] |

|
Konkuk Univ. (2019) |
| QTP-UAV [38] |

|
KARI (2018) | ||
| Tiltduct UAV (TD-40/TD-20) [39] |

|
KARI (2017) | ||
| Tiltduct UAV (TD-100/TD-60) [40] |

|
KARI (2012) | ||
|
Separation/ combining |
Aerial separation/combining of mother and child UAV [30] |

|
Korea Aerospace Univ. (2022) | |
| Docking-undocking of unmanned vehicle [67] |

|
KARI (2023) | ||
| Aerial separation mechanism [68] |

|
KAIST (2022) | ||
|
Biomimetic wing based shape shifting drone |
Self-shape shifting |
The wing for beetle mimicking MAV [48] |

|
Konkuk Univ. (2019) |
| System |
Core technology (level 1)[6] |
Core element technology (level 2) |
Core element technology (level 3) |
Applied drone |
|---|---|---|---|---|
| Shape shifting drone | (Tl) Shape shifting platform technology | (Tl.l) Structure transform technology | (Tl.1.1) Movability transform technology | R, F |
| (Tl.l.2) Airframe transform technology | R, F | |||
| (Tl.1.3) Thrust vector transform technology | R, F | |||
| (Tl.1.4) Wing/feather mimicked structure/driving technology | B | |||
| (Tl.l.5) Lifting force generating flapping technology | B | |||
| (T1.2) Separation/combining technology | (T1.2.1) Safe separation/combining technology | R, F | ||
| (Tl.2.2) Multiagent integrated operation technology | R, F | |||
| (Tl.2.3) Multiagent integrated interface technology | R, F | |||
| (Tl .2.4) Light weight structure technology | B | |||
| (Tl.2.5) Graspable leg technology | B | |||
| (T2) Multiple shape control technology | (T2.1) Reconfiguration/transition state control technology | (T2.1.1) Shape shifting dynamic characteristic technology | R, F, B | |
| (T2.1.2) Shape shifting posture stabilization technology | R, F, B | |||
| (T2.2) Control redistribution technology | (T2.2.1) Real time control distribution technology | R, F, B | ||
| (T2.2.2) Shape modeling and identification technology | R, F, B | |||
| (T3) Mission operation technology | (T3.1) Multidomain operation technology | (T3.1.1) Multidomain optimal operation technology | R, F, B | |
| (T3.1.2) Energy optimal operation technology | R, F, B | |||
| (T3.1.3) Mission performance extension technology | R | |||
| (T3.2) Mission planning technology | (T3.2.1) Autonomous mission unit operation technology | R, F, B | ||
| (T3.2.2) Shape shifting operation planning technology | R, F, B | |||
| (T4) Sensor/actuator technology | (T4.1) Sensor technology | (T4.1.1) shape shifting recognition technology | R, F, B | |
| (T4.1.2) Separation/combining sensor technology | R, F | |||
| (T4.1.3) Mission environment recognition technology | R, F, B | |||
| (T4.2) Actuator technology | (T4.2.1) Transformed shape actuating technology | R, F | ||
| (T4.2.2) Separation/combining actuator technology | R, F | |||
| (T4.2.3) Biomimetic actuator technology | B | |||
| (T4.2.3) High degree of freedom distributed actuator technology | R, B |

| Drone type | Characteristic | ||||||
|---|---|---|---|---|---|---|---|
| Velocity | Range | Payload | Camouflage | Environment overcoming |
Operation expandability |
||
| Fixed shape drone | Rotary wing | ○ | ○ | □ | X | ○ | X |
| Fixed wing | ◎ | ◎ | ○ | X | X | X | |
| Biomimetic | X | X | X | ◎ | △ | X | |
| Shape shifting drone | Rotary wing | □ | □ | △ | X | ◎ | ◎ |
| Fixed wing | ○ | ○ | △ | X | ◎ | ○ | |
| Biomimetic | X | X | X | ◎ | □ | □ | |
| No. | Country | Rotary wing based shape shifting drone |
Fixed wing based shape shifting drone |
Biomimetic based shape shifting drone |
Total | ||
|---|---|---|---|---|---|---|---|
| Self-shape shifting |
Seperation /combining |
Self-shape shifting |
Seperation /combining |
Self-shape shifting |
|||
| 1 | USA | 6 | 2 | 5 | 1 | 1 | 15 |
| 2 | Switzerland | 3 | - | 2 | - | 2 | 7 |
| 3 | Japan | 3 | - | - | - | - | 3 |
| 4 | Germany | - | - | 1 | - | 2 | 3 |
| 5 | UK | - | - | 1 | - | 2 | 3 |
| 6 | France | 1 | - | 1 | - | - | 2 |
| 7 | Israel | 1 | - | - | - | - | 1 |
| 8 | India | 1 | - | - | - | - | 1 |
| 9 | Norway | 1 | 1 | - | - | - | 2 |
| 10 | Italia | - | 1 | - | - | - | 1 |
| 11 | Brazil | - | 1 | - | - | - | 1 |
| 12 | Singapore | - | - | 1 | - | - | 1 |
| 13 | Spain | - | - | 1 | - | - | 1 |
| 14 | Australia | - | - | - | 1 | - | 1 |
| 15 | China | 1 | 1 | - | - | 1 | 3 |
| Total | 17 | 6 | 12 | 2 | 8 | 45 | |
| Type | Items | Appearance | Research institute (Year) | |
|---|---|---|---|---|
| Rotary wing based shape shifting drone |
Self-shape shifting | Reconfigurable drone [14] |
|
UC. berkeley (2022) |
| Shape morphing drone [8] |
|
Virginia Tech. (2022) | ||
| Pegasus-II [11] |
|
Robotic research Co. (2020) | ||
| Morphing quadrotor [49] |
|
Univ. of Washington (2018) | ||
| Small hybrid ground-air vehicle [19] |
|
Univ. of Minnesota (2017) | ||
| - [50] | Shape memory plastic development for shape shifting drone (article) |
Army research lab. (2020) | ||
| M4 [20] |
|
Caltech (2023) | ||
| Separation/ combining | Shape-shifter [21] |
|
NASA (2019) | |
| Mega-drone [26] |
|
Amazon Co. (2016) | ||
| Type | Items | Appearance | Research institute (Year) | |
|---|---|---|---|---|
| Fixed wing based shape shifting drone |
Self-shape shifting |
GL-10 [31] |
|
NASA (2014) |
| Transformer TX (ARES) [12] |
|
DARPA (2019) | ||
| Transwing [32] |
|
PteroDynamics co. (2019) | ||
| MIST-UAV [33] |
|
Minnesota Univ. (2019) | ||
| Separation/ combining |
UAV and quarcopter [29] |
|
Florida Tech. (2021) | |
| Biomimetic wing based shape shifting drone |
Self-shape shifting |
BatBot [43] |
|
UIUC (2017) |
| Type | Items | Appearance | Research institute (Year) | |
|---|---|---|---|---|
| Rotary wing based shape shifting drone |
Self-shape shifting |
Foldable drone [15] |
|
Univ. of Zurich (2018) |
| Omni-orientational hexacopter [51] |
|
Voliro Co./Univ. of Zurich (2018) | ||
| New inspection drone [52] |
|
EPFL/Elythor (2023) | ||
| Fixed wing based shape shifting drone |
Self-shape shifting |
Tiltwing UAV [34] |
|
Univ. of Zurich (2019) |
| Paceflyer S100 [35] |
|
Univ. of Zurich (2016) | ||
| Biomimetic wing based shape shifting drone |
Self-shape shifting |
Rapter [13] |
|
EPFL (2020) |
| A perching robot of griffin project [41] |
|
EPFL (2023) | ||
| Type | Items | Appearance | Research institute (Year) | |
|---|---|---|---|---|
| Rotary wing based shape shifting drone |
Self-shape shifting |
Transform able multirotor [16] |
|
Univ. of Tokyo (2017) |
| Dragon [17] |
|
Univ. of Tokyo (2018) | ||
| SPIDAR [22] |
|
Univ. of Tokyo (2023) | ||
| Type | Items | Appearance | Research institute (Year) | |
|---|---|---|---|---|
| Fixed wing based shape shifting drone |
Self-shape shifting |
Pheonix-2 eVTOL [53] |
|
Lilium Gmbh. (2022) |
| Biomimetic wing based shape shifting drone |
Self-shape shifting |
BicnicFlyingFox [44] |
|
Festo Co., (2018) |
| BionicSwift [45] |
|
Festo Co., (2020) | ||
| Type | Items | Appearance | Research institute (Year) | |
|---|---|---|---|---|
| Fixed wing based shape shifting drone |
Self-shape shifting |
Morphing UAV [54] |
|
Southampton Univ. (2018) |
| Biomimetic wing based shape shifting drone |
Self-shape shifting |
SNAG [42] |
|
Stanford Univ. (2021) |
| AquaMAV [46] |
|
Imperial College London (2016) | ||
| Type | Items | Appearance | Research institute (Year) | |
|---|---|---|---|---|
| Rotary wing based shape shifting drone | Self-shape shifting |
Morphing Quadcopter [18] |
|
Aix Marseille Univ. (France, 2018) |
| Fixed wing based shape shifting drone | Self-shape shifting |
A3 Vahana [36] |
|
Airbus Co. (2018) |
| Type | Items | Appearance | Research institute (Year) | |
|---|---|---|---|---|
| Rotary wing based shape shifting drone | Self-shape shifting | Morphy [55] |
|
Norwegian Univ. of science and technology (Norway, 2024) |
| Separation/combining | Megskopter [27] |
|
Univ. of Oslo (Norway, 2015) | |
| Type | Items | Appearance | Research institute (Year) | |
|---|---|---|---|---|
| Rotary wing based shape shifting drone |
Self-shape shifting | TJ-flyingfish [25] |
|
Tongji University (China, 2023) |
| Separation/combining | Air separation drone [56] |
|
Nanjing Univ. (China, 2024) | |
| Biomimetic wing based shape shifting drone | Self-shape shifting | Xiaosun [47] |
|
Northwestern Polytechnical Univ., (China, 2024) |
| Type | Items | Appearance | Research institute (Year) | |
|---|---|---|---|---|
| Rotary wing based shape shifting drone |
Self-shape shifting |
FSTAR [23] |
|
The Ben Gurion Univ. of the Negev (Israel, 2019) |
| Elasticopter [24] |
|
IIIT-Hyderabad (India,2021) | ||
| Separation/ combining |
Pop.up Next [57] |
|
Airbus &Audi Co. (Italia, 2018) | |
| DRA [28] |
|
Univ. of Sao Paulo (Brazil, 2020) | ||
| Fixed wing based shape shifting drone |
Self-shape shifting |
U-Iion [37] |
|
National Univ. of Singapore (Singapore, 2017) |
| HADA [58] |
|
INTA (Spain, 2012) | ||
| Separation/ combining |
Aerial refueling [59] |
|
Univ. of Sydney (Australia, 2006) | |
| Rotary wing based shape shifting drone | Fixed wing based shape shifting drone | Biomimetic wing based shape shifting drone |
Total | ||
|---|---|---|---|---|---|
| Self-shape shifting | Separation/ combining | Self-shape shifting | Separation/ combining | Self-shape shifting | |
| 1 | - | 4 | 1 | 1 | 7 |
| (3) | (3) | (4) | (3) | (1) | (14) |
| Type | Items | Appearance | Research institute (Year) | |
|---|---|---|---|---|
| Rotary wing based shape shifting drone |
Self-shape shifting |
Life-saving drone with variable structure [60] |
|
Sangmyung Univ. (2021) |
| Propeller allocation reconfigurable drone [61] |
|
KARI (2015) | ||
| Payload with variable stiffiiess mechanism applied drone [62] |
|
Seoul National Univ. (2018) | ||
| Separation/ combining |
Aerial manipulation drone using multiple drone [63] |
|
Seoul National Univ. (2017) | |
| A drone with connector for combining with mobile robot [64] |
|
Chungnam National Univ. (2018) | ||
| Mother-child drone using magnetic force [65] |
|
Uconsystem Co., Ltd., (2016) | ||
| Fixed wing based shape shifting drone |
Self-shape shifting |
Unmanned Vehicle for air/ground/water environment [66] |
|
Konkuk Univ. (2019) |
| QTP-UAV [38] |
|
KARI (2018) | ||
| Tiltduct UAV (TD-40/TD-20) [39] |
|
KARI (2017) | ||
| Tiltduct UAV (TD-100/TD-60) [40] |
|
KARI (2012) | ||
| Separation/ combining |
Aerial separation/combining of mother and child UAV [30] |
|
Korea Aerospace Univ. (2022) | |
| Docking-undocking of unmanned vehicle [67] |
|
KARI (2023) | ||
| Aerial separation mechanism [68] |
|
KAIST (2022) | ||
| Biomimetic wing based shape shifting drone |
Self-shape shifting |
The wing for beetle mimicking MAV [48] |
|
Konkuk Univ. (2019) |
| Type | Foreign country | Domestic | |
|---|---|---|---|
| Rotary wing based shape shifting drone |
Self-shape shifting | Applied research level | Basic research level |
| Separation/combining | Most basic research level (partially applied research level) |
Basic research level | |
| Fixed wing based shape shifting drone |
Self-shape shifting | Most applied research level (partially test development level) |
Most applied research level (partially basic research level) |
| Separation/ combining | Basic research level | Basic research level | |
| Biomimetic wing based shape shifting drone |
Self-shape shifting | Most applied research level (partially test development level) |
Basic research level |
| Separation/ combining | N/A | N/A | |
| System | Core technology (level 1)[6] |
Core element technology (level 2) |
Core element technology (level 3) |
Applied drone |
|---|---|---|---|---|
| Shape shifting drone | (Tl) Shape shifting platform technology | (Tl.l) Structure transform technology | (Tl.1.1) Movability transform technology | R, F |
| (Tl.l.2) Airframe transform technology | R, F | |||
| (Tl.1.3) Thrust vector transform technology | R, F | |||
| (Tl.1.4) Wing/feather mimicked structure/driving technology | B | |||
| (Tl.l.5) Lifting force generating flapping technology | B | |||
| (T1.2) Separation/combining technology | (T1.2.1) Safe separation/combining technology | R, F | ||
| (Tl.2.2) Multiagent integrated operation technology | R, F | |||
| (Tl.2.3) Multiagent integrated interface technology | R, F | |||
| (Tl .2.4) Light weight structure technology | B | |||
| (Tl.2.5) Graspable leg technology | B | |||
| (T2) Multiple shape control technology | (T2.1) Reconfiguration/transition state control technology | (T2.1.1) Shape shifting dynamic characteristic technology | R, F, B | |
| (T2.1.2) Shape shifting posture stabilization technology | R, F, B | |||
| (T2.2) Control redistribution technology | (T2.2.1) Real time control distribution technology | R, F, B | ||
| (T2.2.2) Shape modeling and identification technology | R, F, B | |||
| (T3) Mission operation technology | (T3.1) Multidomain operation technology | (T3.1.1) Multidomain optimal operation technology | R, F, B | |
| (T3.1.2) Energy optimal operation technology | R, F, B | |||
| (T3.1.3) Mission performance extension technology | R | |||
| (T3.2) Mission planning technology | (T3.2.1) Autonomous mission unit operation technology | R, F, B | ||
| (T3.2.2) Shape shifting operation planning technology | R, F, B | |||
| (T4) Sensor/actuator technology | (T4.1) Sensor technology | (T4.1.1) shape shifting recognition technology | R, F, B | |
| (T4.1.2) Separation/combining sensor technology | R, F | |||
| (T4.1.3) Mission environment recognition technology | R, F, B | |||
| (T4.2) Actuator technology | (T4.2.1) Transformed shape actuating technology | R, F | ||
| (T4.2.2) Separation/combining actuator technology | R, F | |||
| (T4.2.3) Biomimetic actuator technology | B | |||
| (T4.2.3) High degree of freedom distributed actuator technology | R, B |
| Rotary wing base shape shifting drone |
Fixed wing based shape shifting drone |
Biomimetic shape shifting drone |
Average | |
|---|---|---|---|---|
| Domestic technology level [%] | 66.6 | 67.7 | 64.4 | 66.2 |
| Technological gap (year) | 3.5 | 3.3 | 3.7 | 3.5 |
| Reference country (with the world best technology) | USA | USA | USA, Germany | USA |
(◎: Very Good, ○: Good, □: Average, △: Bad, X: Too Bad)
(Note) R: rotary wing based shape shifting drone, F: fixed wing based shape shifting drone, B: Biomimetic shape shifting drone