ABSTRACT
This paper presents model-based hysteresis and cross-coupling compensators designed for precise control of a piezoelectric fast steering mirror (FSM). The hysteresis compensators are developed by inversely modeling the variation in the force constant relative to various excitation voltages, enabling the system to maintain linear response characteristics across a broad range of input amplitudes. The cross-coupling compensator is formulated by creating a decoupling matrix that cancels out coupling effects, generating signals of equal magnitude and opposite phase for each axis. The implementation of these compensators reduces the hysteresis band and magnitude uncertainty in the FSM dynamics by over 89.6% and 74.2%, respectively, while also significantly suppressing cross-coupling effects by more than 85.5%. Furthermore, the performance of the proposed compensators is validated in a closed-loop control system, demonstrating a notable reduction in cross-axis vibrations and improved tracking performance in response to step reference inputs and highfrequency sinusoidal trajectories.
-
KEYWORDS: Fast steering mirror, Piezoelectric actuator, Nonlinearity, Hysteresis, Cross-coupling, Model-based compensation
-
KEYWORDS: 고속 조준 거울, 압전형 구동기, 비선형성, 이력특성, 축 간 커플링, 모델 기반 보상
1. 서론
첨단 광학 시스템의 요구 성능 고도화에 따라 빔의 경로를 능동적으로 제어할 수 있는 고속 조준 거울(Fast Steering Mirror, FSM)의 중요성이 높아지고 있다. 특히 압전형 구동기를 사용하는 FSM은 높은 추력 성능과 넓은 구동 대역폭의 장점으로 외란 저감 및 고속 지령 추종 성능이 요구되는 레이저 통신[
1-
3], 스캔[
4,
5], 가공[
6,
7] 등의 다양한 분야에서 활용되고 있다.
압전형 구동기는 역 압전 효과(Converse Piezoelectric Effect)를 이용하여 전압을 입력함으로써 변위를 발생시키는데, 인가한 전압을 제거하더라도 초기 상태로 돌아가지 못하는 이력 특성(Hysteresis)을 필연적으로 가지게 된다. 이는 압전형 FSM의 구동 정밀도와 제어 시스템의 안정성을 저하시키는 주요 요인으로 알려져 있다[
8-
10]. 따라서 이력특성을 정량적으로 모델링하고 이를 보상하기 위한 다양한 접근법이 제안되어 왔으며, 특히 입력 신호에 이력특성의 역함수(Inverse Hysteresis) 모델을 캐스캐이드(Cascade) 형태로 결합하여 비선형성을 보상하는 연구가 활발히 수행되고 있다[
11-
13]. 이와 관련하여 대표적인 이력 보상 모델로는 Preisach, Prandtl–Ishlinskii 그리고 Bouc–Wen 모델이 있으며[
12,
14], 각 모델은 구조적 특성과 실시간 제어 측면에서 상이한 장단점을 가진다. Preisach 모델은 다수의 이진 릴레이 연산자들의 조합을 통해 이력특성을 근사하는 방식으로 구성된다. 다양한 이력특성 곡선을 높은 정밀도로 재현 가능하다는 장점이 있지만, 정확도 확보를 위해서는 많은 수의 연산자들이 필요하여 연산 부하가 높다는 단점을 가진다[
13,
15]. Prandtl–Ishlinskii 모델은 Preisach 모델과 유사한 구조를 가지며, 다수의 1차 이상의 연산자들의 선형 조합을 통해 이력특성을 표현하는 방식이다. 역함수 모델을 설계하기 용이하고, 상대적으로 적은 연산자만으로도 높은 정확도를 확보할 수 있어 실시간 제어에 효과적이라는 장점을 가진다[
16,
17]. 마지막으로 Bouc-Wen 모델은 미분 방정식을 통해 상대적으로 적은 수의 파라미터로 다양한 이력 곡선을 연속적으로 표현 가능하나, 모델 파라미터에 대한 물리적 해석이 제한적이고 역함수 모델을 해석적으로 도출하기 어렵다는 단점을 가진다[
18,
19].
압전형 FSM은 유연형 힌지를 통해 거울이 팁(Tip), 틸트(Tilt) 두 방향으로만 움직이도록 하는데, 하나의 이동부를 두 축으로 제어하는 구조적 특성으로 축 간 커플링(Cross-coupling)이 필연적으로 발생하게 된다. 커플링은 제어 시스템 내에서 외란으로 작용하며 구동 정밀도를 저해하기 때문에[
20,
21], 유연형 힌지는 상호 축 간 영향을 최소화하도록 설계된다[
22,
23]. 그러나 가공 및 조립 공차로 인해 기구 설계를 통한 커플링 저감에는 한계가 있으며, 구동 주파수가 높아질수록 그 영향이 커지기 때문에, 이를 능동적으로 저감하기 위한 제어 관점에서의 연구들도 진행되었다. Wang(L.) 등[
24]은 전자기형 FSM의 선형 응답 특성을 이용한 모델 기반 디커플링 제어기를 설계하였으며, 개루프 제어 시스템에서 100 Hz 정현파 신호에 대한 상호 축의 진동을 7%에서 0.8%까지 저감하고 폐루프 제어 시스템의 지령 추종 오차 감소를 통해 제어기의 성능을 검증하였다. 제어 시스템 성능 검증 과정에서 특정 주파수에서의 커플링 저감 성능만을 나타내고 있으며, 구동기에 높은 전류가 인가되었을 때 발생하는 비선형적인 특성에 대한 고려가 이루어지지 않아 운용 환경에 따른 제어기의 성능 저하가 발생할 수 있다는 제한점을 가진다. Wang(R.) 등[
25]은 압전형 FSM에 대하여 다중 신경망 구조와 피드백 오차 학습을 통해 이력특성과 축 간 커플링을 보상하는 제어 기법을 제안하였으며, 100 Hz의 정현파 지령 신호에 대한 상호 축에 발생하는 진동을 2.85%에서 1.17%까지 저감하였다. 그러나 해당 연구 또한 특정 주파수에 대한 지령 추종 성능만을 나타내고 있으며, 이력특성과 커플링 특성이 보상기를 통해 얼마나 저감되었는지에 대한 정량적인 분석이 이루어지지 않았다는 한계를 가진다.
본 연구에서는 압전형 FSM의 비선형 이력특성과 축 간 커플링에 대한 모델 기반 보상기를 설계하였으며, 그 성능에 대한 체계적인 검증을 진행하였다. 주파수 응답 특성을 기반으로 한 이력 특성 보상기를 설계함으로써 주파수 영역에서 시스템의 높은 선형성을 확보하였으며, 입력 크기에 따른 시스템의 주파수 응답 특성 변화와 저주파 입력 전압 신호에 따른 출력 변위 간의 관계를 통해 그 성능을 검증하였다. 이를 기반으로 커플링으로 인해 발생하는 상호 축 진동을 효과적으로 상쇄할 수 있는 디커플링 행렬을 설계 및 모델링 하였으며, 넓은 주파수 범위에 대한 커플링 크기 저감을 통해 그 성능을 확인하였다. 또한 폐루프 제어 시스템 내에서 제안하는 보상기가 지령 추종 성능 개선 및 진동 저감에 미치는 영향을 정량적으로 측정하였으며, 이를 통해 제안하는 보상기 설계 과정에 대한 타당성을 실험적으로 검증하였다.
2. FSM 비선형 거동 계측
2.1 FSM 응답 특성 계측 환경
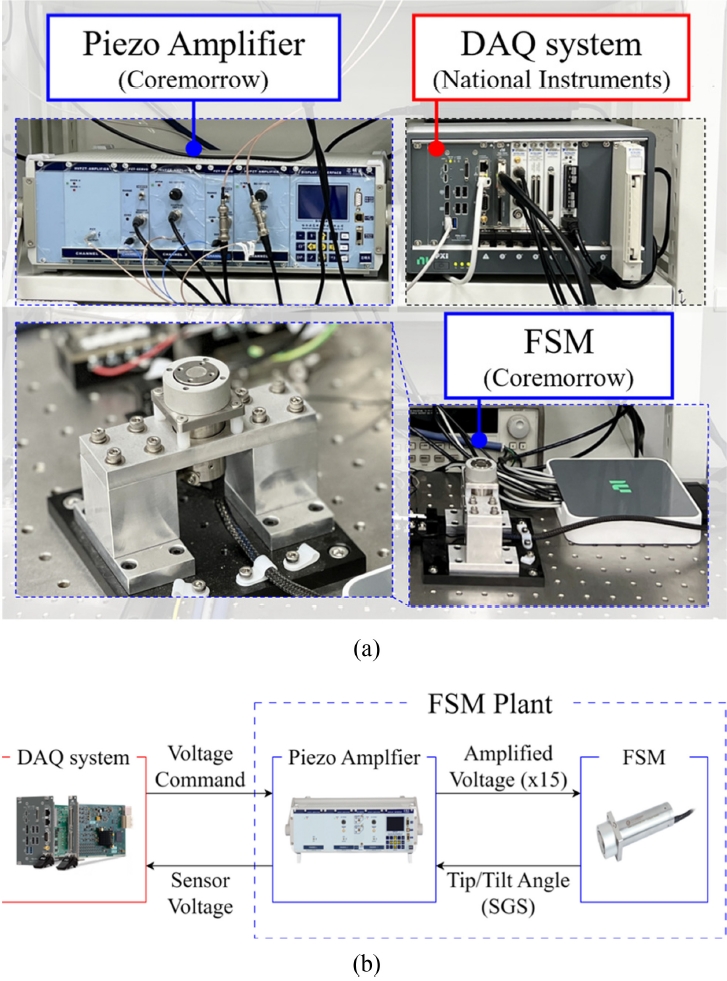
Fig. 1(a)는 본 연구에서 사용한 압전형 FSM과 피에조 증폭기(Coremorrow 社, FSM : S37.T4SF, Piezo Amplifier : E00.D3), 그리고 비선형 거동 계측을 위한 DAQ (Data Acquisition) 시스템(National Instruments 社, Controller : NI 8861, FPGA Module : NI 7856R)을 나타내고 있다. FSM의 각 축을 구성하는 두 개의 피에조 구동기는 중립 전압 75 V를 중심으로 입력 전압(u
x, u
y)에 따라 각 구동기에 서로 반대 방향의 증폭된 전압이 인가되어 이동부에 회전 운동을 발생시킨다. FSM 이동부의 팁, 틸트 방향 회전각은 스트레인 게이지 센서(Strain Gauge Sensor, SGS)를 통해 측정되며 해당 변위 신호는 피에조 증폭기에서 일정 비율(1.626 V/mrad)로 변환되어 전압 형태로 출력된다. 각 실험 구성 요소들의 성능은
Table 1에 정리되어 있으며
Fig. 1(b)와 같이 연결되었다. FSM과 같이 빠른 동특성을 가지는 구동기에서는 충분히 높은 샘플링 주파수를 설정하여 위상 지연을 최소화하는 것이 중요하다[
7,
20]. 이를 위해 FSM Plant 동특성 대비 10배 이상 빠른 샘플링 주파수(400 kHz)를 적용하고, 디지털 신호처리 간 지연을 최소화할 수 있도록 제어 시스템을 설계하였다.
2.2 FSM의 비선형 거동
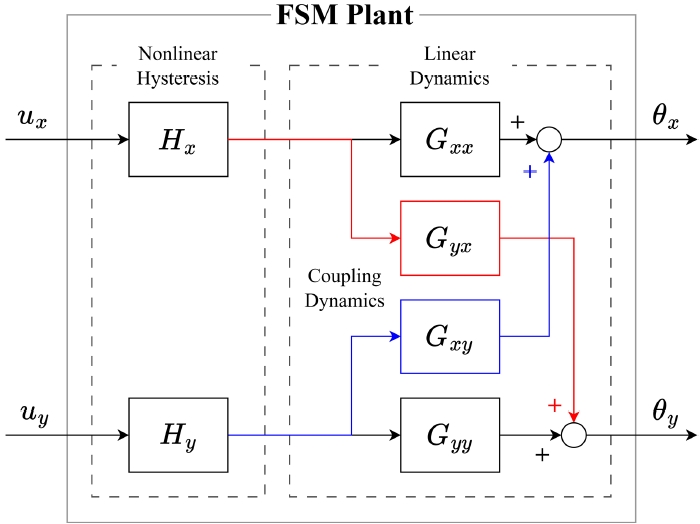
압전형 구동기의 이력특성으로 인해 FSM Plant는 비선형적인 거동을 하게 되는데, 이를 모델링하는 방법으로 Hammerstein-Wiener 구조가 널리 이용되고 있다[
10,
14,
26,
27]. 비선형성을 정적인 특성으로 가정하고 선형적인 동특성과의 조합을 통해 전체 시스템 거동을 모델링하는 방식으로 이를 블록 선도로 나타내면
Fig. 2와 같다. 이러한 구조적 가정을 활용하면 낮은 주파수 영역에서 피에조 증폭기 및 힌지 등의 구조로 인한 동특성을 상수로 간주할 수 있게 되고, 결과적으로 이력특성이 FSM Plant 응답에 미치는 영향을 독립적으로 측정할 수 있다. 측정된 이력특성을 기반으로 적절한 보상기를 설계하면 비선형성으로 인한 FSM Pl ant의 모델 불확실성을 크게 저감함으로써 선형 동특성 모델을 정확하게 식별할 수 있게 된다. 이를 위해 3장에서는 압전형 구동기의 이력특성에 대한 보상기와 선형 동특성 기반의 커플링 보상기를 설계하였으며, 4장에서는 설계된 보상기를 통한 개루프 및 폐루프 제어 성능 개선을 통해 제안하는 보상기들의 효과를 실험적으로 검증하였다.
3. 이력특성 및 커플링 보상기
3.1 이력특성 보상기
이력특성은 시스템의 응답 지연, 입력에 따른 주파수 응답 특성 변화 등을 발생시키게 된다. 시스템 거동의 불확실성은 제어 시스템의 여유(Margin)에 영향을 주며 시스템의 진동 및 발산을 야기할 수 있기 때문에 제어 성능과 안정성 확보를 위해 필수적으로 보상되어야 한다. 이를 위해 주파수 응답 특성 기반의 이력 특성 보상기 설계 방식을 적용하였는데, 이는 일반적으로 사용되는 이력특성 초기 곡선 기반이 아닌 정현파 입력 신호의 진폭에 따른 추력 상수 변화를 직접적으로 사용하여 입력 크기 변화에 강건한 주파수 응답 특성 확보에 유리하다는 장점이 있다[
10].
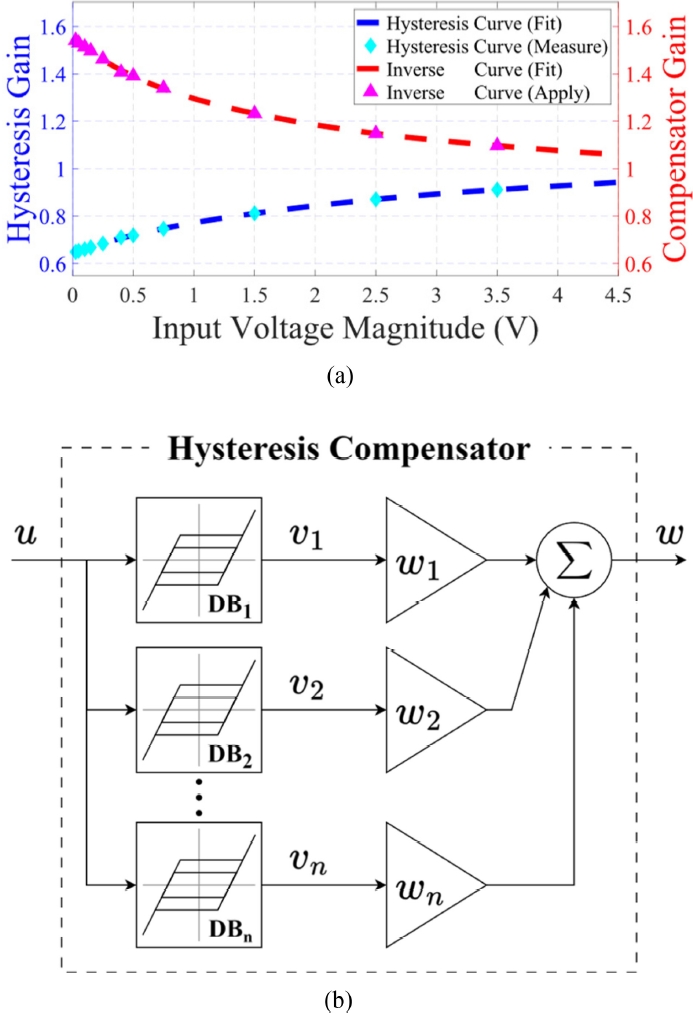
Fig. 3(a)는 1.0 Hz 정현파 신호의 입력 진폭에 따른 응답 크기 변화를 0.615 mrad/V를 기준으로 정규화 한 그래프와 이를 보상하기 위한 이력 특성 보상기의 이득 특성을 나타내고 있다. 입력 전압의 진폭이 증가할수록 힘을 발생시키는 전기 쌍극자 모멘트들의 정렬이 더 많이 발생하게 되고 이로 인해 추력 상수가 증가하는 효과를 가져오게 된다. 이력특성 보상기는 이러한 추력 상수의 변화를 일정하게 만드는 것을 목적으로 하며, 이를 구현하기 위해
Fig. 3(b)와 같이 Prandtl-Ishlinskii 모델 기반의 보상기를 설계하였다. 이는 입력 범위에 따른 추력 상수의 변화를 구간별 선형화(Piecewise-linear) 과정을 통해 보상하는 구조로
식(1)에 나타난 것과 같은 백래쉬 연산자(Backlash Operator)와 가중치 벡터의 선형 조합을 통해 나타낼 수 있다.
여기서 DB, u[k]와 v[k]는 각각 불감대(Deadband), k번째 입력과 출력을 의미한다. 본 연구에서는 총 12개의 백래쉬 연산자들을 사용하였으며, 입력 크기의 변화에 따라
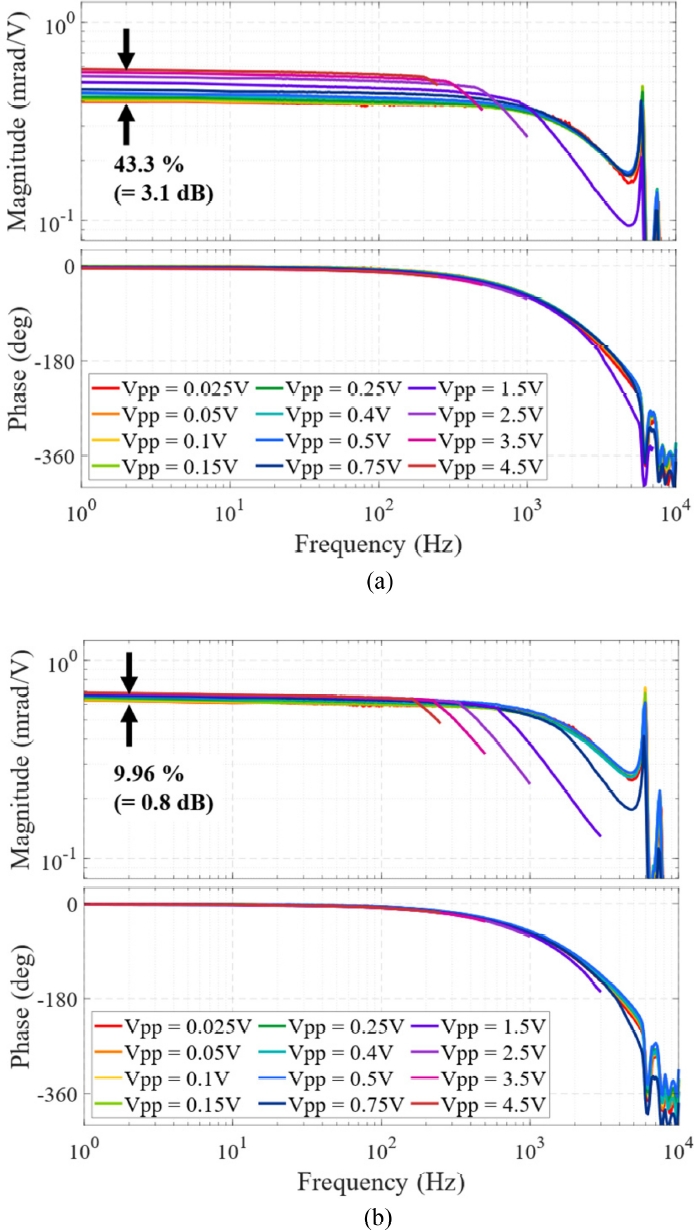
Fig. 3(a)에 나타난 Compensator Gain에 해당하는 값이 출력되도록 가중치를 설정하였다. 구간별 선형화를 위한 연산자들의 불감대 분포는 추력 상수의 변화가 상대적으로 급격하게 나타나는 1.0 V 이하의 입력 구간에 밀집되도록 설계하였다. 이력특성으로 인한 시스템의 불확실성 저감을 확인하기 위해 입력 신호의 크기 변동에 따른 FSM Plant의 주파수 응답 특성을 확인하였으며 그 결과는
Fig. 4와 같다.
Fig. 4(a)는 이력특성으로 인해 입력 신호에 따른 주파수 응답 크기가 최대 3.1 dB 발생하였으나, 이력특성 보상기를 사용하였을 때는
Fig. 4(b)와 같이 응답크기 변화가 0.8 dB로 입력 크기에 따른 시스템의 불확실성이 74.2% 감소한 것을 확인하였다.
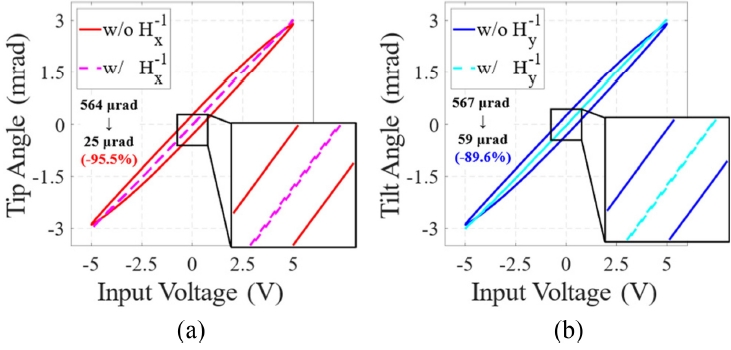
Fig. 5는 최대 구동 진폭으로 시스템을 1.0 Hz로 가진 하였을 때 입력 전압과 출력 변위 간의 관계를 보여주고 있다. 기준 전압에서 팁, 틸트 방향의 변위 폭 감소가 각각 95.5%, 89.6%로 측정되었으며, 이를 통해 비선형성 이력특성이 상쇄되어 입출력 관계가 선형적으로 보상되었음을 확인할 수 있었다.
3.2.1 커플링 보상 모델 설계
압전형 FSM의 모델 기반 커플링 보상기를 설계하기 위해서는 넓은 대역폭에 대하여 시스템 거동을 왜곡 없이 식별하고 모델링하는 과정이 필요하다. 이를 위해 FSM Plant를 다중 입출력 시스템(Multi-input Multi-output, MIMO)으로 취급하고 이를 수식으로 나타내면
식(2)와 같다.
여기서 G
ji는 i축 방향 입력 신호에 대한 j축 변위 출력 전달함수를 의미하며, 우변 동특성 행렬의 비대각(Off-diagonal) 요소들이 커플링을 나타낸다. 입력 신호에
식(3)과 같은 변환 행렬을 추가하여 비대각 행렬 요소들을 상쇄시켜주는 것이 커플링 보상기의 기본적인 원리이며, 이를 위해 해당 변환 행렬 모델을 정확하게 설계하는 것이 중요하다.
식(3)의 행렬을 디커플링 행렬이라고 하며, 비대각 요소들은 대각 요소로 인해 발생하는 커플링 효과를 모델 기반으로 예측하여 보상하는 역할을 한다. 이를
식(2)의 시스템 동특성 행렬과 함께 나타내면
식(4)와 같은 결과를 얻을 수 있으며 비대각 요소가 0이 되는 것을 통해 이상적으로 커플링이 제거됨을 알 수 있다. 본 연구에 사용된 FSM Plant는
식(4)의 대각요소에 존재하는 G
yx·G
xy의 크기가 G
xx, G
yy보다 100배 이상 작기 때문에 설계된 커플링 보상기는 기존 FSM Plant의 동특성에 큰 변화 없이, 제어 시스템에 외란으로 작용하게 되는 상호 축에 대한 영향 만을 저감할 수 있게 된다. 또한 이러한 모델 기반의 보상기는 지령 전압에 대한 신호처리로 작동하여 실시간 제어 간에 센서 노이즈의 영향을 직접적으로 받지 않는다는 장점을 가진다.
3.2.2 커플링 보상 모델 식별
앞서
식(3)에 나타난 디커플링 행렬의 비대각 요소들은 전달 함수들의 나눗셈을 통해 표현되며 주파수 응답 영역에서
식(5) 및
식(6)과 같이 계산된다.
이는 곧 디커플링 행렬은
식(2)에 나타난 FSM Plant의 선형 동특성 행렬 요소에 대한 개별 측정을 통해 계산됨을 의미한다. 이력특성 보상기를 사용하여 시스템 동특성의 불확실성을 감소시키고, 다양한 주파수의 정현파 신호 입력에 대한 출력 신호의 크기 및 위상 지연을 측정하여 FSM Plant에 대한 선형 동특성을 측정하였다. 이를 기반으로 디커플링 행렬 요소에 대한 이산 시간 전달함수 모델을 다음과 같이 설계하였다.
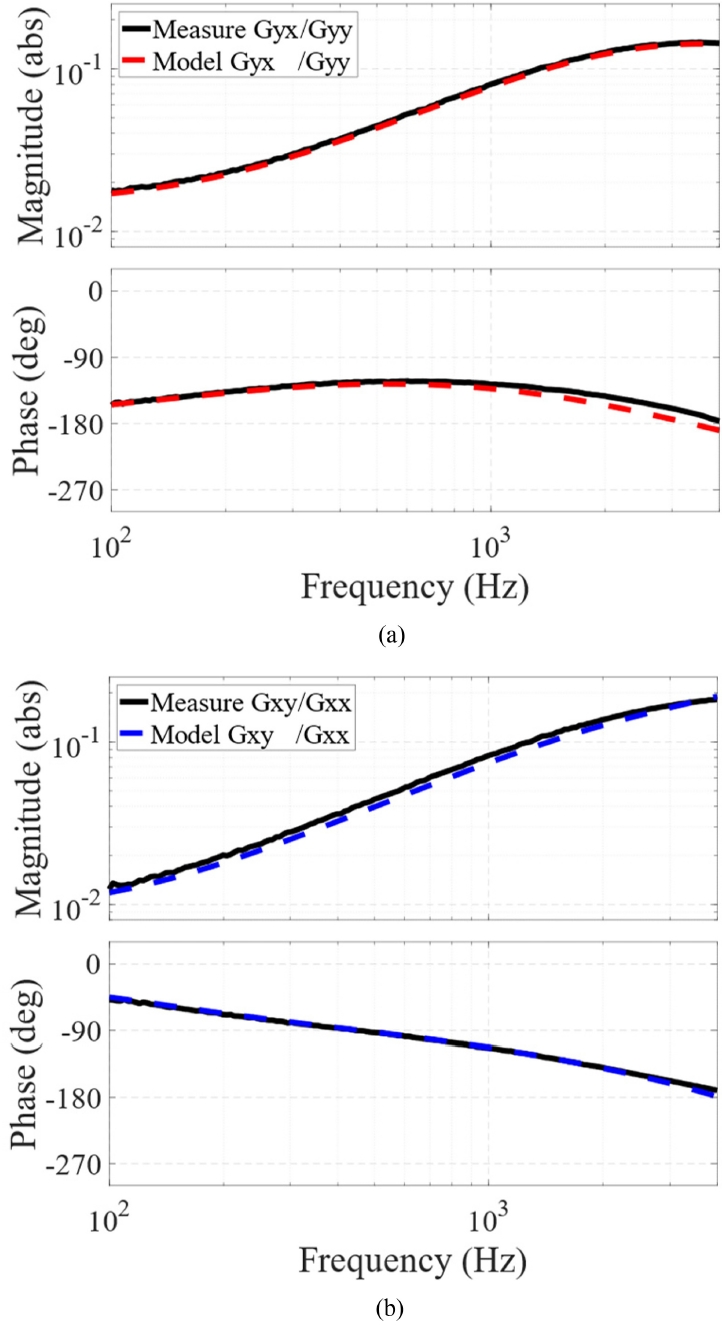
Fig. 6에서 이에 대한 계측 데이터와 모델의 주파수 응답 특성을 비교하고 있다. 실선으로 표시된 계측 결과와 점선으로 표시된 모델링 결과가 고주파수 영역까지 높은 정확도로 일치함을 통해 디커플링 행렬 요소에 대한 모델링이 적절하게 설계되었음을 확인할 수 있었다.
4. 제어 성능 검증
4.1 개루프 제어 시스템
Figs. 7(a)는 커플링 보상기와 이력특성 보상기, 그리고 FSM Plant가 합쳐진 Compensated FSM Plant를 나타내고 있다. 커플링 보상기는 상호 축에 대한 커플링 동특성 크기 저감을 통해 그 성능을 확인할 수 있으며,
Figs. 8(a)와
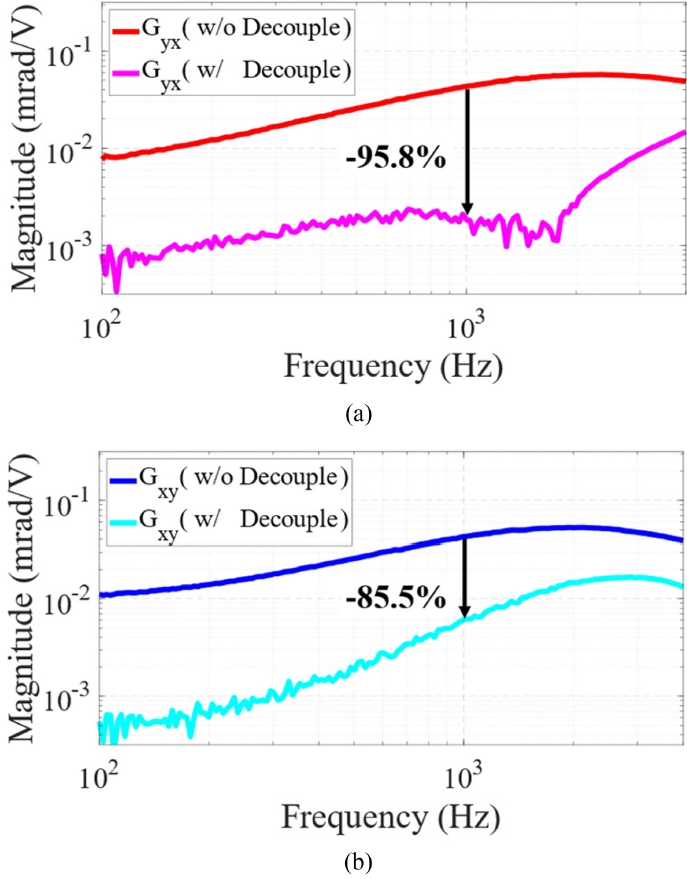
8(b)는 각각 팁, 틸트 방향으로 0.5 V의 진폭을 가지는 정현파 신호가 입력되었을 때 상호 축에 대한 주파수 응답 크기를 보여준다. 커플링 보상 이후 틸트와 팁 방향의 커플링 크기는 100 Hz에서 각각 0.13%, 0.08%를 보였으며, 1,000 Hz의 높은 주파수에서도 두 방향 모두 1.11% 이하로 측정되었다. 이는 커플링 보상기를 사용하지 않았을 때의 동일한 주파수에 대한 응답 크기와 비교하여 85.5% 이상 감소한 수치로 커플링 보상기가 커플링으로 인한 진동을 효과적으로 상쇄하고 있음을 보여준다.
4.2 폐루프 제어 시스템
본 연구에서 설계한 보상기가 폐루프 제어 시스템에 미치는 영향을 분석하기 위해
식(9)와 같은 이산시간 비례-적분(Proportional-Integral, PI) 제어기를 적용하였다.
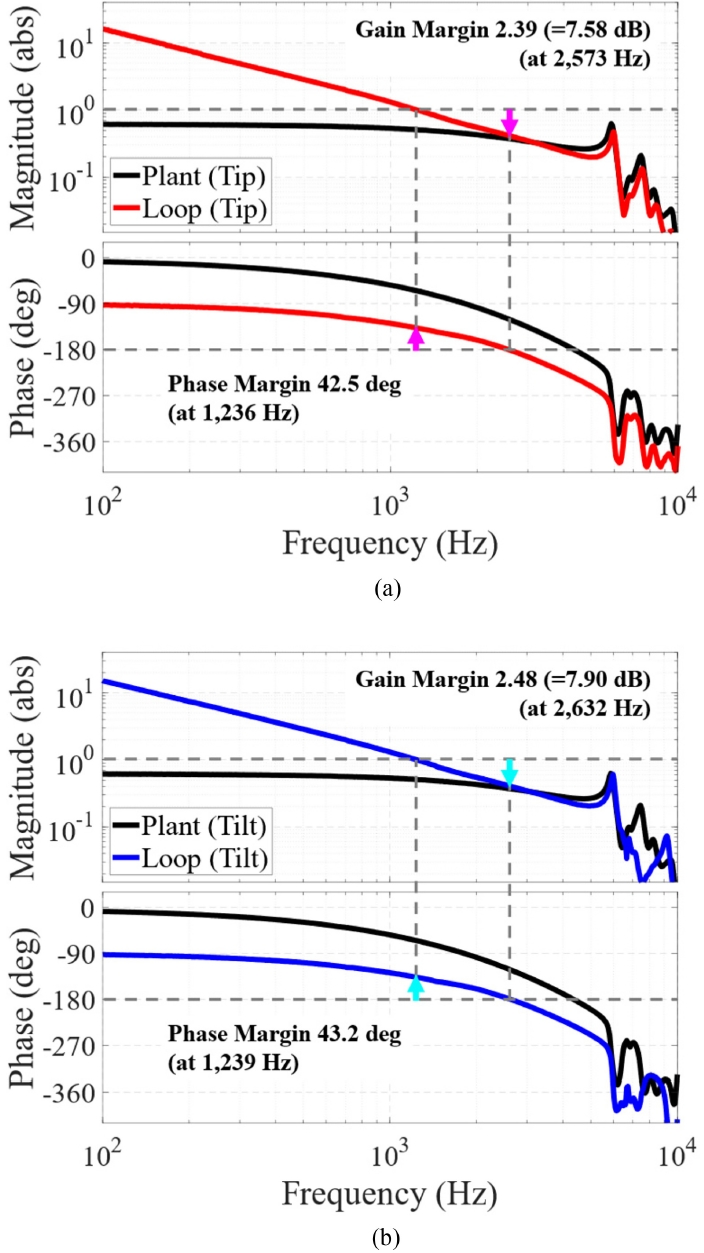
Fig. 9는 제어 시스템의 루프 전달함수(Loop Transfer Function)에 대한 주파수 응답을 나타내고 있으며 팁, 틸트 방향 모두 42.5 deg, 7.58 dB 이상의 충분한 위상 및 이득 여유를 확보하여 이력특성의 영향으로 FSM Pl ant의 응답 크기 및 위상에 변화가 발생하더라도 제어 시스템이 안정적으로 작동할 수 있도록 하였다.
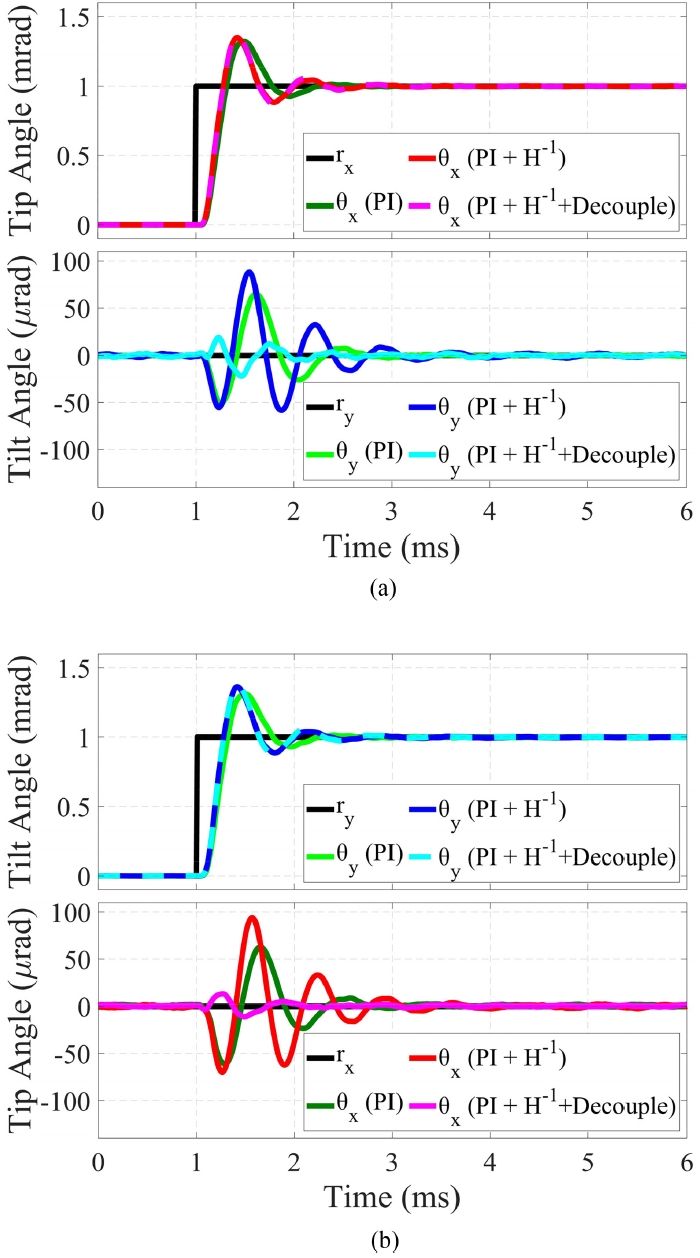
Figs. 10(a)와
10(b)는 각각 팁, 틸트 방향으로 1.0 mrad의 계단 지령 신호를 입력하였을 때의 시스템 응답을 나타내고 있다. 이러한 계단 지령 신호는 FSM Plant의 동특성 전 영역을 가진함으로써 FSM Plant의 커플링 특성으로 인한 상호 축의 지령 추종 성능 변화를 효과적으로 볼 수 있다. PI 제어기와 이력특성 보상기를 함께 사용한 결과 두 축 모두 시스템 응답의 상승 시간이 11.3% 이상 더 빨라진 것을 확인할 수 있는데, 이는 이력특성으로 인해 응답 초기 추력 상수의 감소를 보상하였기 때문이다. 동시에 짧은 시간동안 더 큰 전압이 시스템에 인가되며, 이로 인해 상호 축에 대한 진동의 크기(peak-to-peak)도 증가한 것을 볼 수 있다. 이후 디커플링 제어를 함께 사용하게 되면
Fig. 8에 나타난 것과 같이 커플링의 크기가 크게 감소하여 외란이 작아지는 효과를 가지며, 이를 통해 상호 축 진동이 틸트 방향은 146.6에서 40.4 μrad, 팁 방향은 164.0에서 23.7 μrad로 각각 72.5%, 85.6% 감소한 것을 확인할 수 있었다.
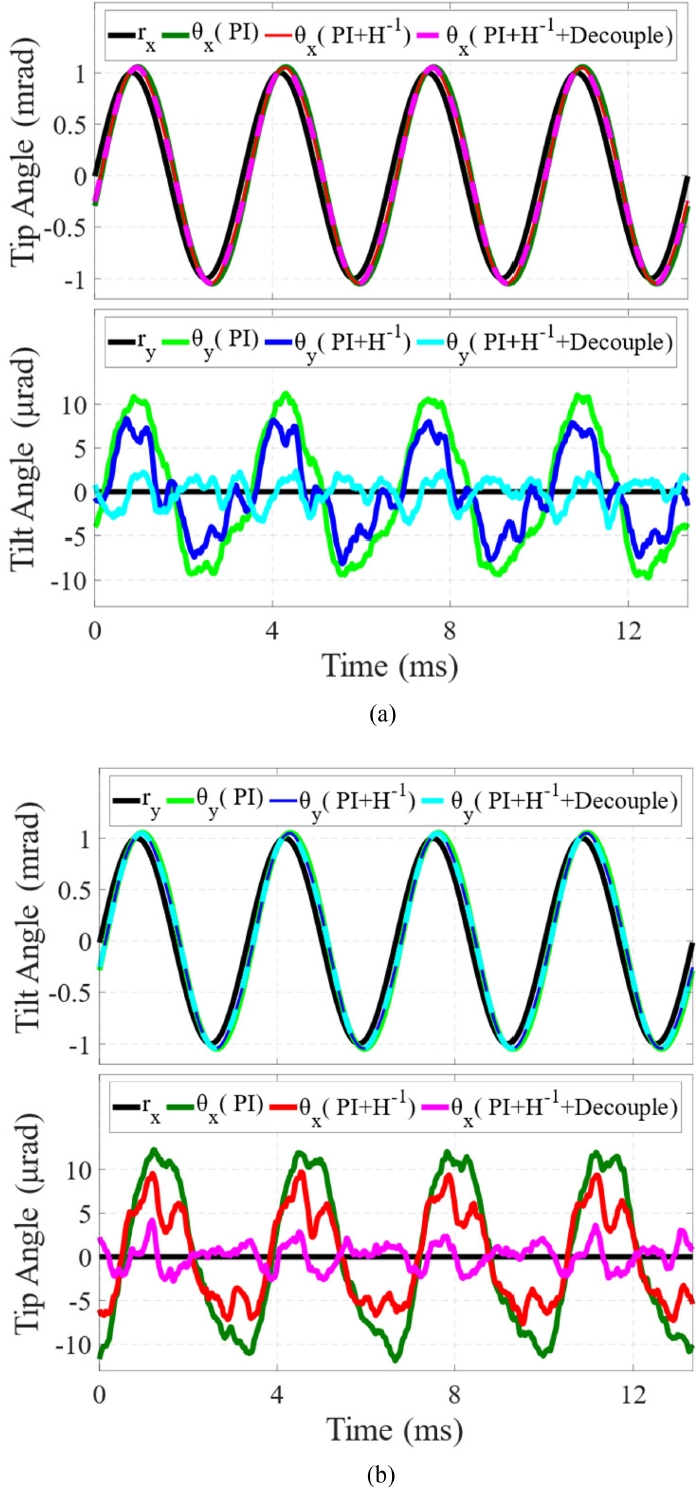
Fig. 11은 한 축에 300 Hz, 1.0 mrad 진폭의 정현파 지령 신호와 반대 축에 정지 지령 신호를 입력했을 때 추종 성능을 나타내고 있다. 이러한 정현파 지령 신호는 이력특성 보상기를 통한 FSM Plant의 위상 지연 저감 및 응답 크기 변화 감소 효과가 제어 시스템에 미치는 영향을 효과적으로 보여줄 수 있다. 이력특성 보상기는 이력특성으로 인해 발생하는 시스템의 지연을 보상함으로써 선형적인 시스템 응답을 확보하며, 정현파 지령에 대한 제곱-평균-제곱근(Root-mean-square, RMS) 오차를 16.9% 이상 감소시킨 것을 확인하였다. 또한, 커플링 보상기를 사용하지 않은 경우 정현파 신호와 동일한 주파수의 외란이 상호 축에 인가되어 진동이 발생하게 되고, 그 결과 틸트, 팁 방향으로 각각 4.59, 5.24 μrad의 RMS 오차가 발생하였다. 커플링 보상기를 사용하였을 때는 틸트, 팁 방향의 추종오차가 1.54, 1.46 μrad로 각각 66.5%, 72.2% 감소하였으며, 이를 통해 제안하는 보상기가 폐루프 제어시스템에서 추종 성능의 향상뿐만 아니라 상호 축에 대한 진동을 효과적으로 저감할 수 있다는 것을 실험적으로 검증하였다.
5. 결론
본 연구에서는 압전형 FSM 구동 시스템의 제어를 위해 외란으로써 작용하게 되는 비선형 이력특성 및 축 간 커플링 현상에 대한 모델 기반 보상 시스템을 설계하였다. 제어 및 계측 시스템의 높은 샘플링 주파수를 통해 고주파 영역에서도 신호 왜곡 및 위상 지연 없이 시스템 응답을 계측하였으며, 이를 통해 시스템에 대한 정확한 식별이 가능하였다. 압전형 FSM의 비선형 거동에 대한 모델링과 이에 대한 보상기 설계를 위해 시스템 응답을 구동기의 전압-추력 상수 간의 정적인 이력특성과 유연형 힌지를 비롯한 구조물의 선형 동특성의 조합으로 나타내었다. 이력특성 보상기 설계에서 이력특성 초기 곡선 기반의 접근 방식 대신 주파수 응답 특성에서 관찰되는 추력 상수의 변화를 직접적으로 활용함으로써 입력 진폭에 따른 주파수 응답 크기 변화에 강건한 보상기를 구현할 수 있었다. 이러한 방식은 주파수 영역에서 시스템의 선형적인 응답을 확보하는데 유리하며, 모델 기반 커플링 보상기를 설계 및 그 성능을 안정적으로 유지하는 데 핵심적인 역할을 한다. 커플링 보상기는 이력특성 보상기를 통해 확보된 시스템의 선형 응답 특성을 기반으로 축 간 커플링으로 인한 상호 축 응답을 상쇄할 수 있도록 디커플링 행렬을 설계하였다. 모델 기반의 보상기 설계와 제어 시스템의 빠른 샘플링으로 신호 이산화로 인한 보상 성능 저하를 방지할 수 있었으며, 이를 통해 고주파 영역에서도 높은 커플링 억제 효과를 유지할 수 있었다. 설계된 이력특성 및 커플링 보상기는 개루프 제어 시스템에서 주파수 응답 특성 변화와 폐루프 제어 시스템에서의 추종 오차 및 진동 감소에 대한 정량적인 측정을 통해 그 성능을 실험적으로 검증하였다. 이러한 보상기 설계 과정에서 사용한 가정 및 수학적 모델들은 특정 장비의 물리적 구조에 종속되지 않는 일반적인 방법론으로써, 유사한 거동 구조를 갖는 FSM을 비롯한 다양한 다자유도 고정밀 시스템에 대해 적용 가능하다. 또한 복잡한 비선형 MIMO 시스템 거동을 독립적인 선형 SISO 시스템으로 취급함으로써 제어 시스템 설계 복잡도를 크게 낮추고 성능을 향상시키는 데 유용하게 활용될 수 있다.
본 연구에서 설계한 보상기를 통해 압전형 FSM의 이력특성 및 커플링 모두 크게 저감할 수 있었으나, 약간의 잔여 오차가 존재하였다. 이는 이력특성을 정적인 특성으로 가정한 부분과 보상 모델 설계 과정에서 발생한 파라미터 오차 성분에 기인했을 것으로 추정된다. 이러한 요인들을 반영하여 향후 연구에서는 동적인(Rate-dependent) 이력특성 성분을 포함하고, 실제 운용 환경을 고려하여 파라미터 오차에 따른 보상 성능 저하를 최소화할 수 있도록 보상기를 개선할 예정이다. 이와 함께, 추종 성능 이외에도 노이즈 민감도 및 외란 저감 성능에 미치는 영향을 통합적으로 분석하여 보상기의 실용성을 보다 다양한 관점에서 검증하고자 한다.
FOOTNOTES
-
ACKNOWLEDGEMENT
이 논문은 2025년 정부(방위사업청)의 재원으로 국방기술진흥연구소의 지원을 받아 수행된 연구임(No. KRIT-CT-22-084).
Fig. 1(a) Experimental testbed for the precision measurement and control of the FSM Plant and (b) Physical signal wiring between the DAQ system and the FSM plant
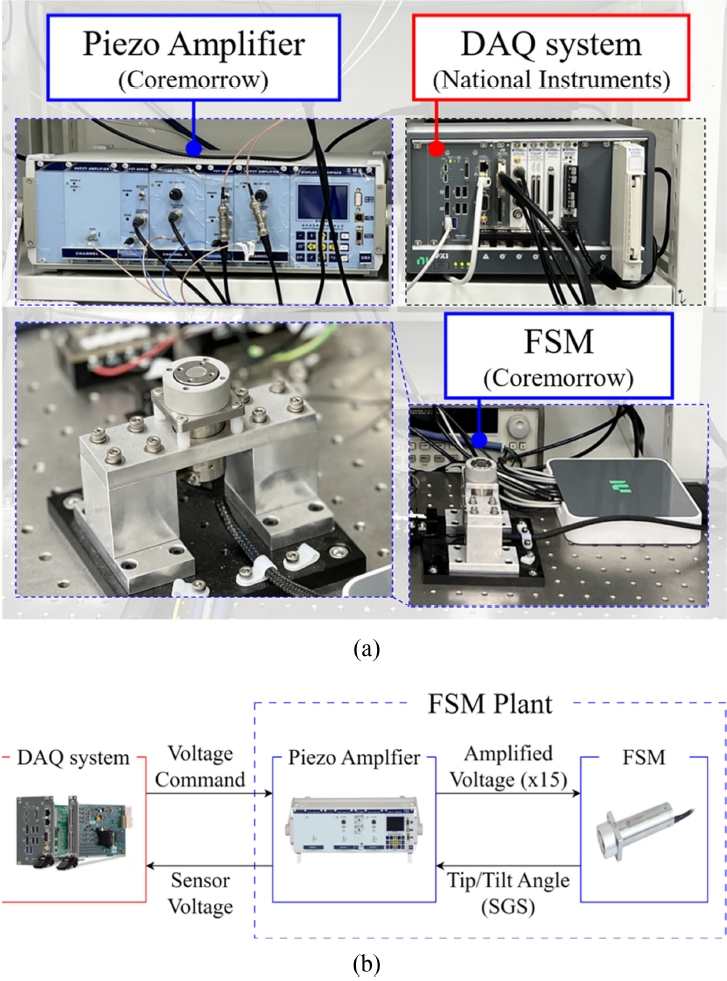
Fig. 2Hammerstein-Wiener structure of the FSM plant, consisting of static nonlinear hysteresis in each axis and linear dynamics of the flexure hinge with cross-coupling effects
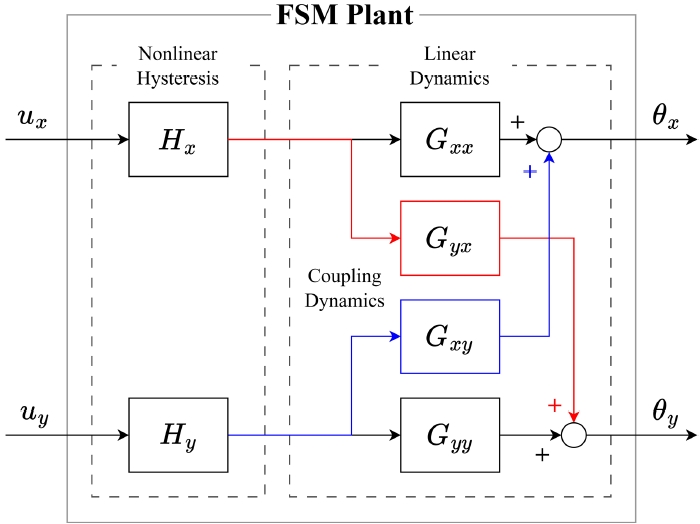
Fig. 3(a) The effects of hysteresis and the desired compensator gains by input voltage magnitudes and (b) Schematic of Prandtl-Ishlinskii model using a linear combination of backlash operators and weights
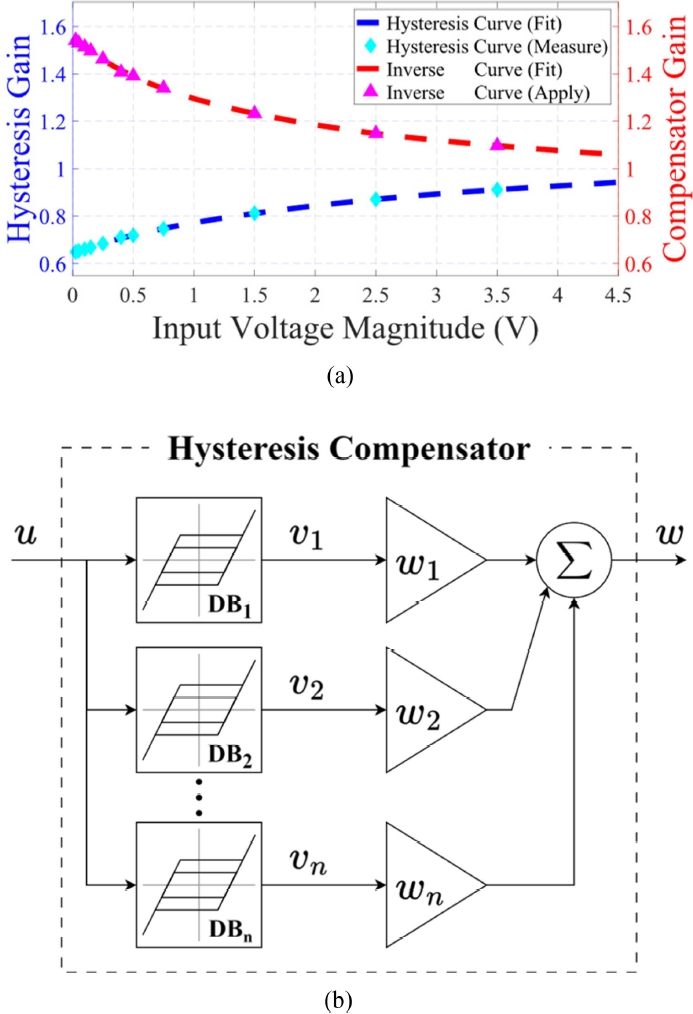
Fig. 4Frequency response of the tip axis (a) without and (b) with hysteresis compensator
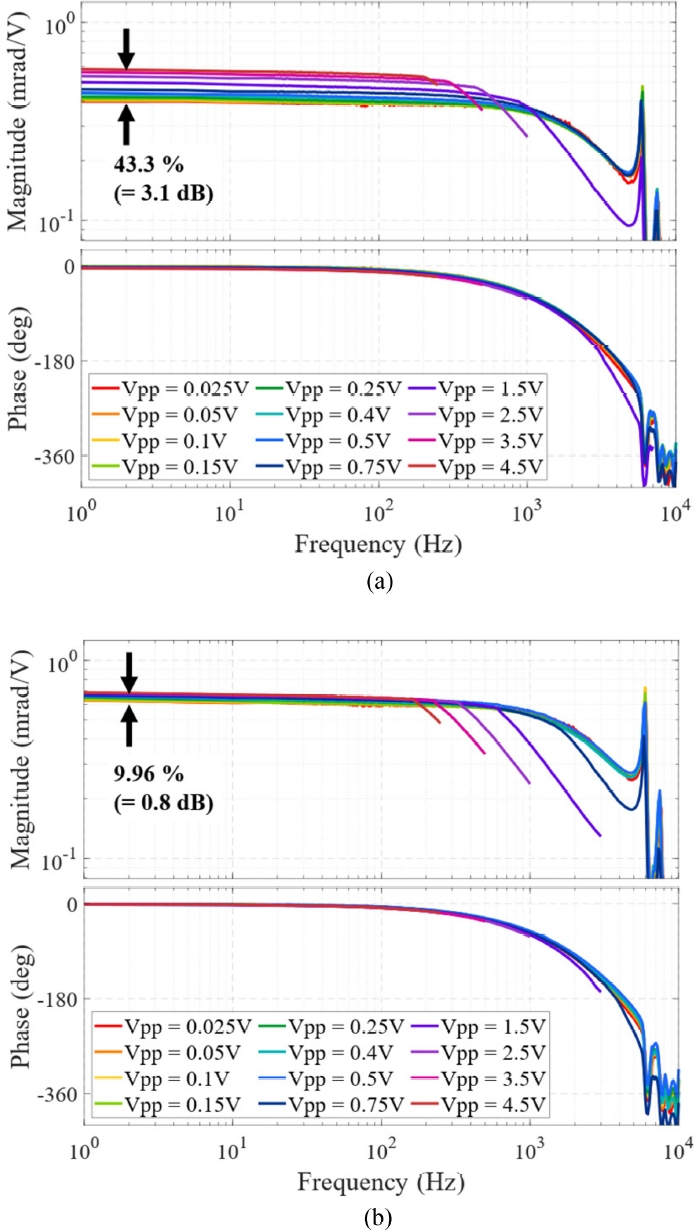
Fig. 5Open-loop response of the FSM plant with and without the hysteresis compensator in (a) the tip and (b) the tilt axis
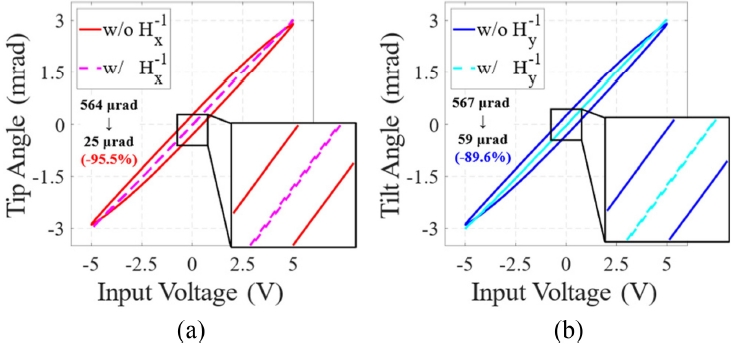
Fig. 6Identified frequency response of the decoupling matrix components for canceling out the cross-coupled dynamics of (a) Gyx and (b) Gxy
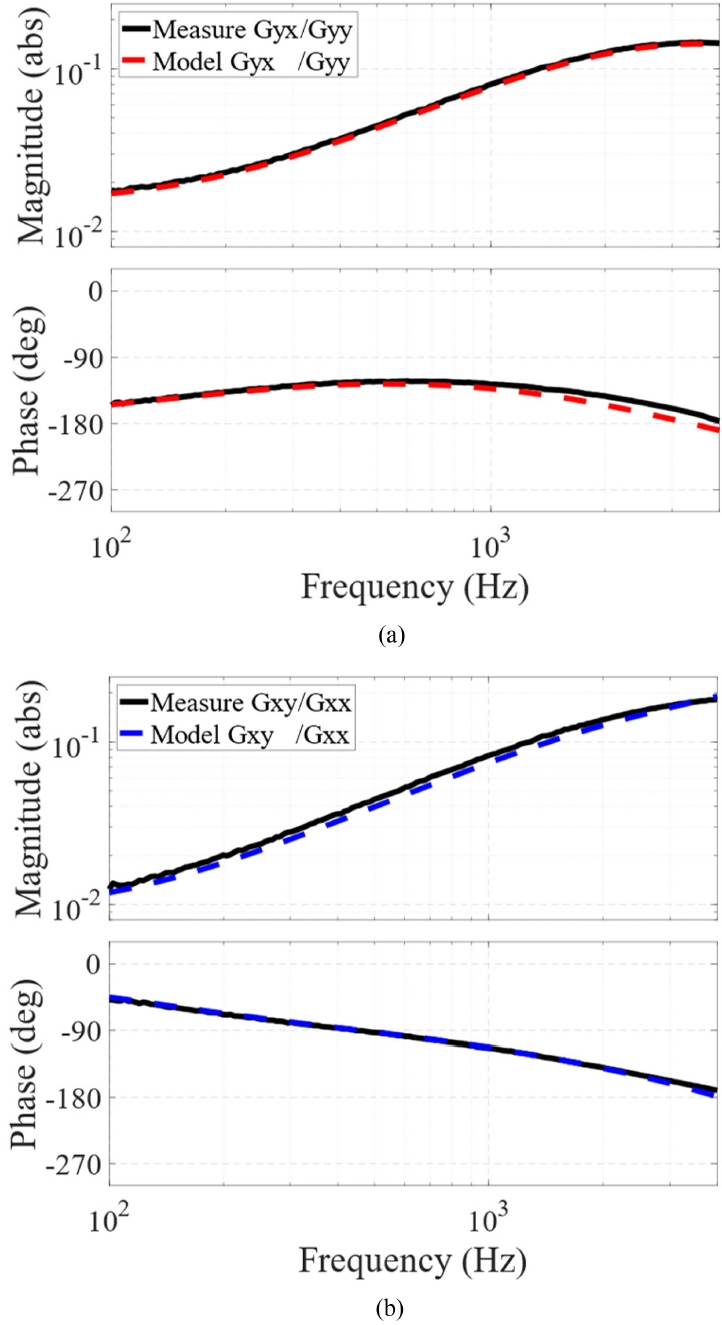
Fig. 7Block Diagram of (a) the hysteresis and cross-coupling compensator with the FSM Plant and (b) the feedback control system
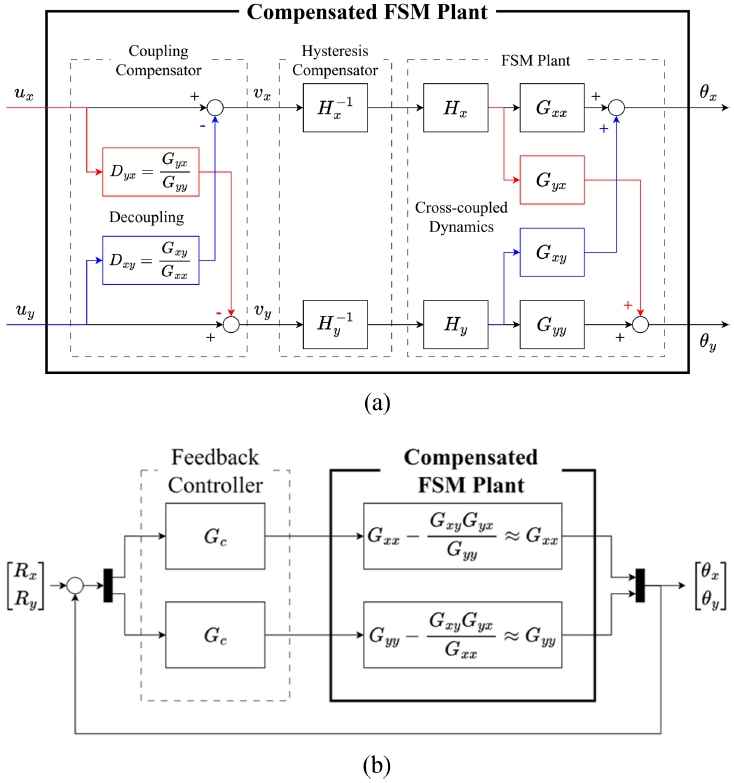
Fig. 8Frequency response of the FSM plant with and without the cross-coupling compensator for (a) Gyx and (b) Gxy
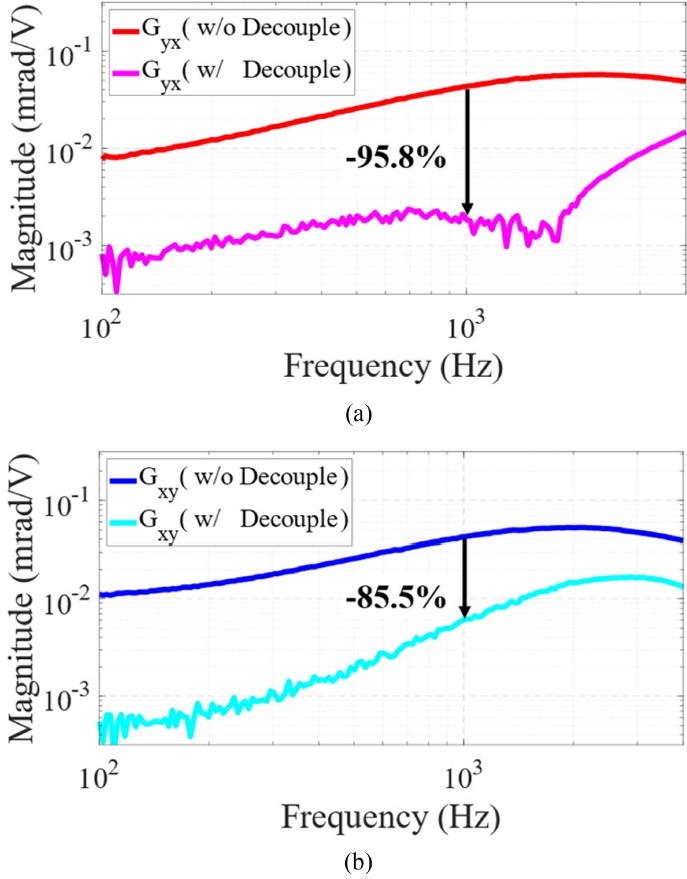
Fig. 9Frequency response of the compensated FSM plant and the loop transmission for (a) the tip and (b) the tilt axis
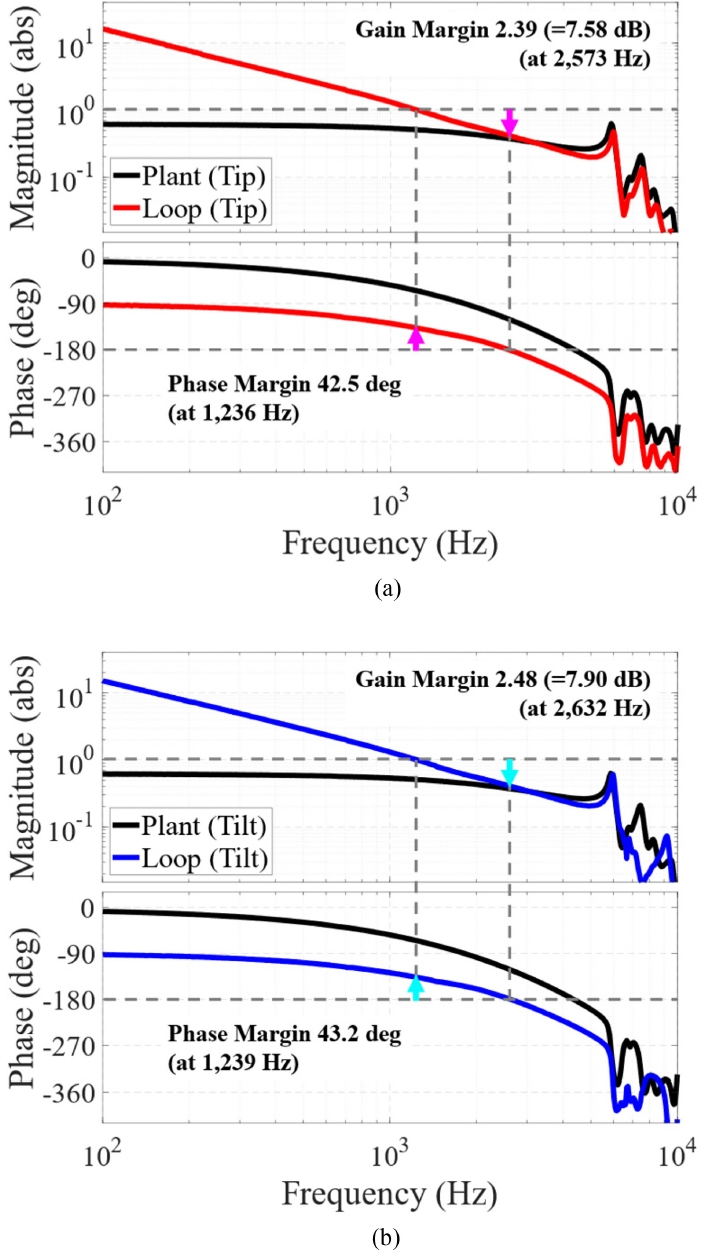
Fig. 10Closed-loop system response of the tip and tilt angle for the reference input of 1.0 mrad for (a) the tip and (b) the tilt axis
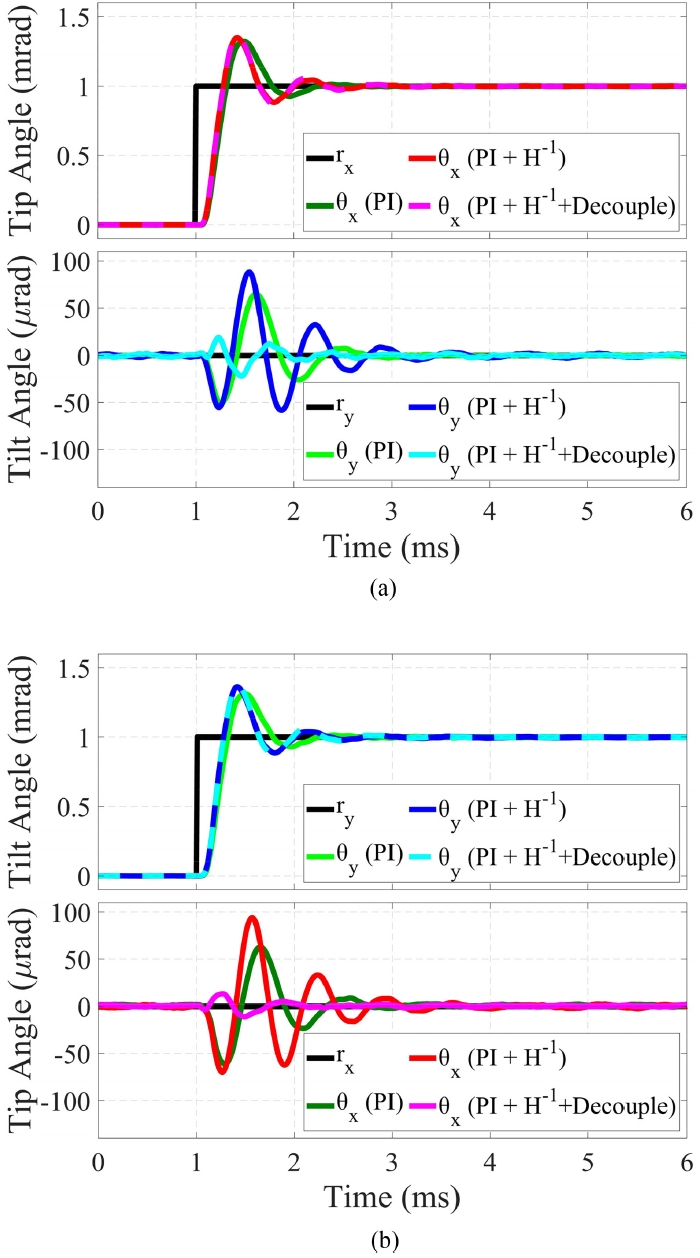
Fig. 11Closed loop tracking performance for the 300 Hz, 1.0 mrad reference of (a) tip and (b) tilt axis and the reference angle for the cross-axis is set to be zero
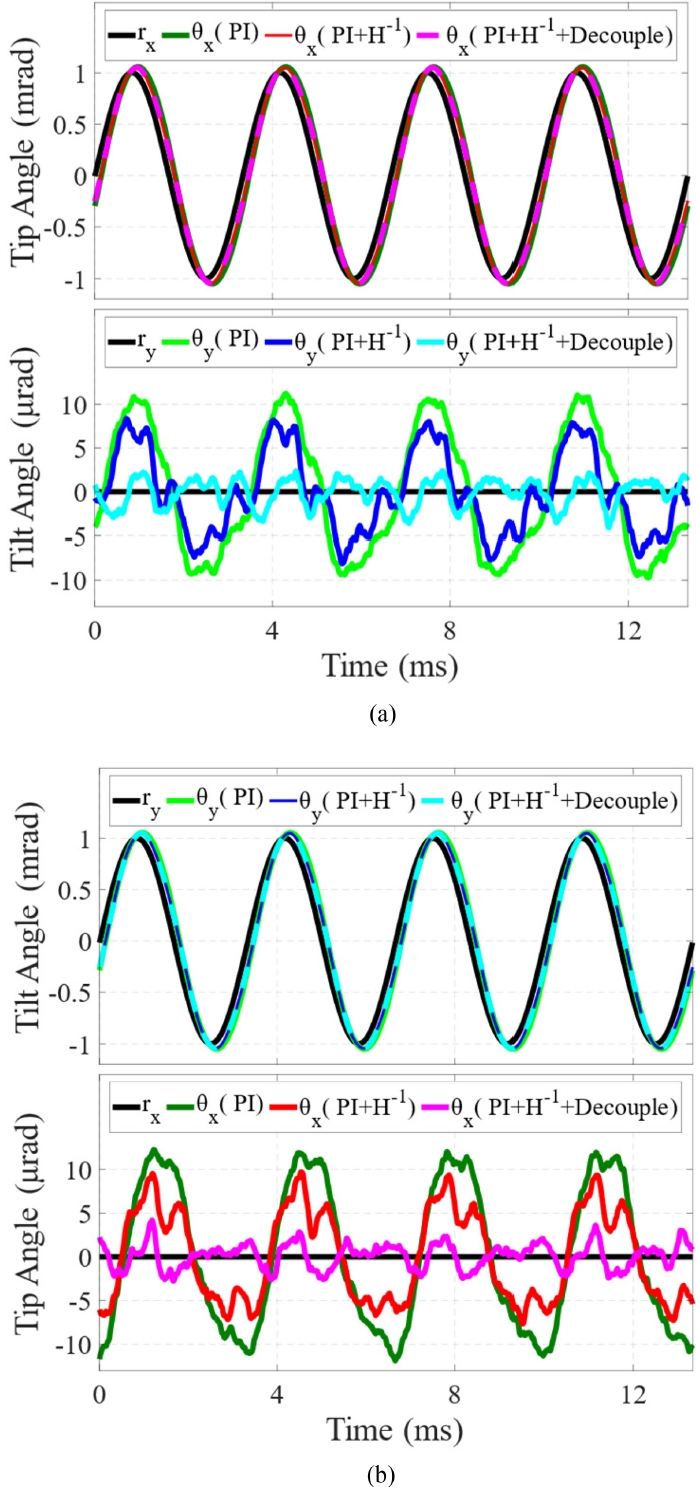
Table 1.Specifications of FSM plant and DAQ system
Table 1.
|
Piezoelectric FSM (Coremorrow, S37.T4SF) |
|
Moving range |
± 3.1 |
mrad |
|
Unloaded resonance frequency |
5.9 |
kHz |
|
Capacitance |
7.2 |
μF |
|
Piezo amplifier (Coremorrow, E00.D3)
|
|
Input voltage range |
± 5 |
V |
|
Output voltage range |
± 75 |
V |
|
Voltage amplification ratio |
15 |
V/V |
|
Bandwidth |
> 20 |
kHz |
|
Sensor signal sensitivity |
1.626 |
V/mrad |
|
Peak current |
1 |
A |
|
DAQ system (National instruments, NI 7856R)
|
|
Analog I/O voltage range |
± 10 |
V |
|
Analog I/O sampling rate |
1 |
MHz |
|
Analog I/O resolution |
16 |
bit |
REFERENCES
- 1. Langenbach, H., Schmid, M., (2005), Fast steering mirror for laser communication, Proceedings of the 11th European Space Mechanisms and Tribology Symposium, 27-33.
- 2. Alvi, B. A., Asif, M., Siddiqui, F. A., Safwan, M., Bhatti, J. A., (2014), Fast steering mirror control using embedded self-learning fuzzy controller for free space optical communication, Wireless Personal Communications, 76(3), 643-656.
- 3. Kuiper, S., Crowcombe, W., Human, J., Dekker, B., Nieuwkoop, E., Meskers, A., Witvoet, G., Kramer, L., Lemmen, M., Lagemaat, H., (2017), High-bandwidth and compact fine steering mirror development for laser communications. Proceedings of the 17th European Space Mechanisms and Tribology Symposium.
- 4. Hafez, M., Sidler, T. C., (1999), Fast-steering two-axis tilt mirror for laser pointing and scanning, Microrobotics and Microassembly, 172-181.
- 5. Csencsics, E., Schitter, G., (2017), System design and control of a resonant fast steering mirror for lissajous-based scanning, IEEE/ASME Transactions on Mechatronics, 22(5), 1963-1972.
- 6. Zhou, Q., Ben-Tzvi, P., Fan, D., Goldenberg, A. A., (2008), Design of fast steering mirror systems for precision laser beams steering. Proceedings of the International Workshop on Robotic and Sensors Environments. 144-149.
- 7. Zhong, J., Nishida, R., Shinshi, T., (2022), Design and precision tracking control of a high-bandwidth fast steering mirror for laser beam machining, Precision Engineering, 73, 128-139.
- 8. Wang, G., Rao, C., (2015), Adaptive control of piezoelectric fast steering mirror for high precision tracking application, Smart Materials and Structures, 24(3), 035019.
- 9. Hao, G., Cao, K., Li, R., Li, Z., Du, H., Tan, L., (2024), Ratedependent hysteresis modeling and compensation for fast steering mirrors, Sensors and Actuators A: Physical, 376, 115568.
- 10. Jung, S. W., Lee, H. G., Jung, J. W., Kim, J. H., Lim, S., Park, Y., Kim, O., Lim, J., Seong, K., Lee, D., Ko, M., Park, N. C., Yoon, J. Y., (2024), Study on hysteretic characteristics of piezoelectric fast steering mirror in frequency response, Journal of the Korean Society for Precision Engineering, 41(11), 913-920.
- 11. Wang, W., Wang, J., Chen, Z., Wang, R., Lu, K., Sang, Z., Ju, B., (2020), Research on asymmetric hysteresis modeling and compensation of piezoelectric actuators with PMPI model, Micromachines, 11(4), 357.
- 12. Gan, J., Zhang, X., (2019), A review of nonlinear hysteresis modeling and control of piezoelectric actuators, AIP Advances, 9(4), 040702.
- 13. Gu, G.-Y., Yang, M.-J., Zhu, L.-M., (2012), Real-time inverse hysteresis compensation of piezoelectric actuators with a modified Prandtl-ishlinskii model, Review of Scientific Instruments, 83(6), 065106.
- 14. Dai, Y., Li, D., Wang, D., (2023), Review on the nonlinear modeling of hysteresis in piezoelectric ceramic actuators, Actuators, 12(12), 442.
- 15. Jiang, H., Ji, H., Qiu, J., Chen, Y., (2010), A modified prandtl-Ishlinskii model for modeling asymmetric hysteresis of piezoelectric actuators, IEEE Transactions on Ultrasonics, Ferroelectrics, and Frequency Control, 57(5), 1200-1210.
- 16. Chen, Y., Qiu, J., Palacios, J., Smith, E. C., (2013), Tracking control of piezoelectric stack actuator using modified Prandtl– Ishlinskii model, Journal of Intelligent Material Systems and Structures, 24(6), 753-760.
- 17. Shan, Y., Leang, K. K., (2012), Dual-stage repetitive control with Prandtl–Ishlinskii hysteresis inversion for piezo-based nanopositioning, Mechatronics, 22(3), 271-281.
- 18. Wang, W., Wang, R., Chen, Z., Sang, Z., Lu, K., Han, F., Wang, J., Ju, B., (2020), A new hysteresis modeling and optimization for piezoelectric actuators based on asymmetric Prandtl-Ishlinskii model, Sensors and Actuators A: Physical, 316, 112431.
- 19. Heredia-Pérez, M., Alvarez, D. A., Bedoya-Ruiz, D., (2025), A state-of-the-art review of the Bouc-Wen class model of hysteresis: Origin, evolution and current state: M. Heredia-Pérez et al, Archives of Computational Methods in Engineering, 1-51.
- 20. Xie, Y., Tan, Y., Dong, R., (2012), Nonlinear modeling and decoupling control of XY micropositioning stages with piezoelectric actuators, IEEE/ASME Transactions on Mechatronics, 18(3), 821-832.
- 21. Wang, F., Zhao, X., Huo, Z., Shi, B., Liang, C., Tian, Y., Zhang, D., (2021), A 2-dof nano-positioning scanner with novel compound decoupling-guiding mechanism, Mechanism and Machine Theory, 155, 104066.
- 22. Han, W., Shao, S., Zhang, S., Tian, Z., Xu, M., (2022), Design and modeling of decoupled miniature fast steering mirror with ultrahigh precision, Mechanical Systems and Signal Processing, 167, 108521.
- 23. Zhang, Z., Yang, X., Yan, P., (2019), Large dynamic range tracking of an Xy compliant nanomanipulator with cross-axis coupling reduction, Mechanical Systems and Signal Processing, 117, 757-770.
- 24. Wang, L., Liu, X., Liang, S., Wang, C., (2024), Decoupling modeling design and high-precision position control of fast steering mirror, Precision Engineering, 88, 487-496.
- 25. Wang, R., Qiao II, Y., Lv III, T., (2017), Movement decoupling control for two-axis fast steering mirror. Proceedings of the Second International Conference on Photonics and Optical Engineering. 413-419.
- 26. Jian, Y., Huang, D., Liu, J., Min, D., (2018), High-precision tracking of piezoelectric actuator using iterative learning control and direct inverse compensation of hysteresis, IEEE Transactions on Industrial Electronics, 66(1), 368-377.
- 27. Liu, L., Li, Q., Yun, H., Liang, J., Ma, X., (2019), Composite modeling and parameter identification of broad bandwidth hysteretic dynamics in piezoelectric fast steering platform, Mechanical Systems and Signal Processing, 121, 97-111.
Biography
- Hyo Geon Lee
received the B.S. degree in mechanical engineering from Yonsei University, Seoul, South Korea, in 2021. He is currently working toward the Ph.D. degree in mechanical engineering at Yonsei University. His research interests include analytical modeling of electromagnetic actuators, precision motion control and manufacturing mechatronics.
- Jae Woo Jung
received the B.S. degree in mechanical engineering in 2020 from Yonsei University, Seoul, South Korea, where he is currently working toward the Ph.D. degree in mechanical engineering. His research interests include mechatronic systems for manufacturing, electromagnetic and electromechanical machine design, and precision motion control.
- Sang Won Jung
received the B.S. degree in mechanical engineering from Yonsei University, Seoul, South Korea, in 2020. He is currently working toward the Ph.D. degree in mechanical engineering at Yonsei University. His research interests include analytical modeling and design of electromagnetic machines, manufacturing mechatronics and precision motion control.
- Jae Hyun Kim
received the B.S. degree in mechanical engineering from Yonsei University, Seoul, South Korea, in 2021. He is currently working toward the Ph.D. degree in mechanical engineering at Yonsei University. His research interests include analytical modeling and design optimization of electromagnetic machines.
- Seonbin Lim
is graduate school student in mechanical engineering at Yonsei University and currently majoring in Structural Vibration. He is especially interested in vibration transmissions in electric vehicles.
- Youngjin Park
received the B.S. degree in mechanical engineering from Soongsil University, Seoul, South Korea, in 2020. He is currently working toward the Ph.D. degree in mechanical engineering at Yonsei University. His research interests include mechanical vibration, haptic, and structural vibration.
- Jaehyun Lim
received the B.S degree in mechanical engineering from Gachon University, Seongnam, South Korea, in 2024. He is currently working toward the M.S degree in me-chanical engineering at Yonsei University. His reasearch interests include mechanical vibration, vibroacoustics, and structural vibration.
- Kijun Seong
received the M.S degree in aerospace engineering from Pusan University, Pusan, South Korea, in 2005. He is currently working at LIG Nex1 Co., Ltd.. His research interests include linear system control, stabilization control of EO/IR system.
- Daehee Lim
received the M.S degree in aerospace engineering from Pusan University, Pusan, South Korea, in 2019. He is currently working at LIG Nex1 Co., Ltd.. His research interests include linear system control, stabilization control of EO/IR system.
- Seunggu Kang
received the B.S degree in robotics from Kwangwoon University, South Korea, in 2024. He is currently working at LIG Nex1 Co., Ltd.. His research interests include linear system control, stabilization control of EO/IR system.
- No-Cheol Park
received B.S., M.S., and Ph.D. degrees from Yonsei University in 1986, 1988, and 1997, respectively. He is currently a professor at the department of mechanical engineering in Yonsei University. His research interest is in Vibration & Optics.
- Jun Young Yoon
received the B.S. degree in mechanical engineering from Yonsei University, Seoul, South Korea, in 2009 and the M.S. and Ph.D. degrees in mechanical engineering from the Massachusetts Institute of Technology (MIT), Cambridge, MA, USA, in 2011 and 2017, respectively. He is currently an Associate Professor at the Department of Mechanical Engineering, Yonsei University. From 2017 to 2019, he was a postdoctoral researcher in mechanical engineering and biological engineering at MIT. His research interests include manufacturing mechatronics and robotics system design, electromagnetic and electromechanical machine design, mechatronic devices for biomedical applications, and precision motion control.