ABSTRACT
Carbon nanotubes (CNTs) are popular in strain sensors due to their exceptional electrical conductivity, flexibility, and sensitivity to deformation. In this study, a high-sensitivity strain sensor was fabricated by spray-coating CNT ink onto various paper substrates, with “lint-free paper” identified as the optimal choice. A total of 10 spray cycles ensured a reliable conductive coating. To enhance durability and broaden application potential, a PET protective layer was incorporated. The sensor's performance was assessed through bending tests using a push-pull gauge across a strain range of 0-2%. The lintfree paper-based sensor exhibited a consistent response up to 1.4% strain. The measured gauge factors (GF) were 121.370 in the 0-0.3% range, 70.999 in the 0.3-0.8% range, and 20.935 in the 0.8-1.4% range. A precise response was also noted when adjusting the bending angle in 1° increments, particularly within the 0-20° range. Additionally, the sensor was tested on the human wrist, confirming its viability for wearable applications. These findings indicate that the lint-free paper-based CNT strain sensor offers high sensitivity and measurement precision within narrow strain ranges. Its lightweight structure and flexible design suggest strong potential for practical use in areas such as sports monitoring and human motion detection.
-
KEYWORDS: Carbon nanotube, Spray coating, Strain sensor, Human motion detection
-
KEYWORDS: 탄소나노튜브, 스프레이 코팅, 스트레인 센서, 인체 동작 감지
NOMENCLATURE
1. 서론
탄소나노튜브(Carbon Nanotube, CNT)는 우수한 기계적 유연성과 전기적 특성을 동시에 보유하고 있어 차세대 유연 전자소자로 주목받고 있다[
1-
11]. CNT는 간단한 코팅 공정을 통해 유연한 전자소자로 구현이 가능하다는 점에서 착용형 헬스케어 디바이스[
3-
5], 로보틱스[
7,
8] 등 여러 분야에서 응용 가능성이 보고되고 있으며, 특히 다양한 운동 특성 측정을 위한 스트레인 센서로 많이 연구되고 있다.
CNT 기반 스트레인 센서는 다양한 기판에 잉크젯 프린팅[
6,
9], 스크린 프린팅[
5], 레이저 커팅[
10] 등 간편한 공정을 통해 제작이 가능하며, 반복적인 변형에도 안정적인 전기적 신호를 출력할 수 있음이 보고되어 왔다. 특히 CNT는 미세한 굽힘이나 인장 변형에 따라 저항이 변화하는 피에조저항 특성을 기반으로 높은 감도를 구현할 수 있다는 점에서, 기존 금속 기반 센서에 비해 우수한 성능을 발휘한다는 장점이 있다[
2,
3].
많은 연구에서는 이러한 CNT 스트레인 센서가 30
o 이상의 굽힘 등 비교적 큰 변형에 대해 높은 게이지 팩터(Gauge Factor)를 보이며, 인체의 관절 움직임이나 웨어러블 장치의 동작을 모니터링하는 데 활용될 수 있음을 입증하였다[
4,
5,
10]. 그러나 실제 착용형 센서의 경우, 손가락이나 얼굴 근육, 피부 미세 움직임 등 매우 작은 각도의 정밀한 감지가 필요한 상황이 많다.
예를 들어, 진전(Tremor) 같은 신경계 증상은 각도 크기가 주요 지표이며, 아주 작은 진폭 변화를 잡는 것이 치료 효과 판단에 필요하다[
12]. 실제로 진전은 수 Hz 대의 리듬을 가진 주기적인 각도 운동으로 나타나며, 임상에서는 그 변화량을 정량화해 치료 반응 여부를 평가한다. 그럼에도 불구하고 기존 연구들은 주로 큰 각도에서의 응답성을 평가하는 데 집중되어 있어, 1
o 이하의 미세 굽힘 변화를 정량적으로 감지할 수 있는 고감도 센서에 대한 연구는 상대적으로 부족한 실정이다. 특히 간단한 제작 공정을 유지하면서도 미세 변형에 대한 정량적 전기적 응답 특성을 확보하는 연구는 여전히 한계가 존재한다.
최근 일부 연구에서는 종이 기반 기판[
5], CNT/그래핀 복합체[
10], CNT/폴리머 복합체[
4] 등을 활용하여 감도 향상을 시도하고 있으나, 이들 또한 주로 큰 변형 영역에서의 성능 검증에 초점이 맞춰져 있어, 실제 미세 굽힘 응용에 적합한지에 대한 평가가 부족하다.
이에 본 연구에서는 CNT 스프레이 코팅 공정을 이용하여 단순하고 비용 효율적인 방법으로 제작 가능한, 1o 수준의 미세 굽힘 변형을 정량적으로 구별할 수 있는 스트레인 센서를 개발하였다. 제작된 센서는 반복 굽힘 하에서도 높은 재현성과 안정적인 전기적 응답을 보였으며, 기존 연구 대비 더욱 정밀한 굽힘 각도 감지가 가능함을 실험적으로 입증하였다.
2. 센서 제작
2.1 CNT 센서 제작 원리 및 방식 선정
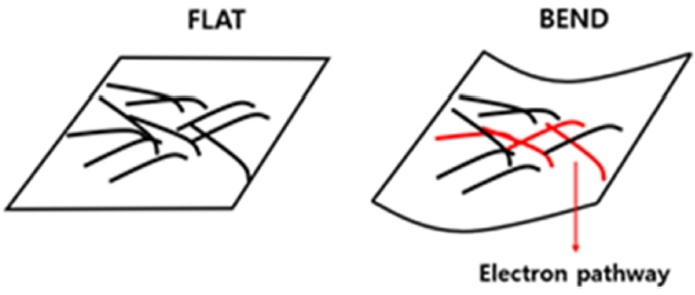
CNT 기반 스트레인 센서가 굽힘 하중을 받을 때 전기 저항이 감소하는 현상을 보여준다. 센서가 굽힘을 받을 경우 CNT 네트워크 내 접촉점의 수와 배치가 변하여 전도 경로가 재구성되며, 이에 따라 저항이 변화한다. 이러한 메커니즘은 Jehn et al. (2021) [
9]에서도 굽힘 변형 실험을 통해 보고된 바 있다. 이는 전기적 경로의 변화에 따른 저항 변화를 측정하는 압저항 효과(Piezoresistive Effect)에 기반한 것이다. CNT는 그 자체로 전도성을 가지며, 서로 접촉된 상태로 무작위적으로 분포된 CNT간의 전류가 흐를 수 있는 경로가 만들어진다[
11]. 본 연구에서는 IPA를 용매로 사용한 CNT 분산액을 스프레이 코팅을 통해 기판 위에 인쇄함으로써 이러한 구조를 형성하였다.
코팅 직후 용매(IPA)의 증발과 함께 CNT들이 기판 표면에 남아 무작위로 배열되며, CNT 간의 물리적 접촉에 의해 전도성 경로가 형성된다. 이때 다층 코팅을 통해 CNT 밀도를 증가시키면 입자 간 접촉이 많아져 전도성이 향상된다. 외부에서 인장 또는 압축 등 기계적 자극이 가해지면 CNT 간의 상대적인 위치가 변하며 네트워크 구조가 재배열되고, 이로 인해 전기적 경로가 바뀌면서 전체 저항이 변화하게 된다.
CNT를 기판에 인쇄하기 위한 공정에는 잉크젯 프린팅, 스크린 프린팅, 드롭 캐스팅, 스프레이 코팅 등 다양한 방식이 있다. 본 연구에서는 이 중 스프레이 코팅(Spray Coating) 방법을 채택하였다. 이는 간단한 장비만으로도 대면적 균일 코팅이 가능하고, 제작 공정이 빠르며, 다양한 기판에 적용할 수 있다는 장점을 가진다. 또한 코팅 횟수를 조절함으로써 민감도 제어가 가능하며, 반복성 있는 실험과 대량 제작 측면에서도 효율적이다. 따라서 본 연구에서는 간단성, 재현성, 고감도 특성 확보를 모두 만족할 수 있는 공정으로 스프레이 코팅법을 선택하였다.
일반적으로 CNT 기반 센서 제작에는 CNT 분말, 용매(IPA 또는 물), 그리고 계면활성제를 통한 분산 안정화 또는 화학적 기능화 공정이 활용된다. Jehn 등은 CNT/PDMS 복합 잉크 제작 시 Triton X-100을 첨가하여 CNT를 수용액에 안정적으로 분산시켰으며[
9], Choudhary 등은 그래핀–CNT 복합 잉크 제조 과정에서도 Triton X-100을 사용하여 용액의 균질성을 확보하였다[
10]. 또한 Wang 등은 CNT/PDMS 복합 센서 제작 시 Triton X-100을 분산제로 사용하여 안정적인 수성 CNT 잉크를 제조하고 이를 스프레이 방식으로 적층하였다[
7]. 이처럼 Triton X-100은 CNT 분산을 위한 대표적인 계면활성제로 널리 사용되고 있다.
본 연구에서는 이러한 기존 연구 동향을 바탕으로, 평균 지름 15-25 nm, 길이 5-15 μm의 MWCNT를 IPA에 분산시키고, 분산 안정화를 위해 Triton X-100을 첨가하여 CNT 잉크를 조제하고자 하였다. 이후 이 잉크를 무진지(Lint-free Paper), 한지(Korean Paper), 일반 종이, PCB 기판 위에 스프레이 코팅하고자 하였으며, Wave A900 Airbrush (노즐 직경 0.7 mm)를 사용하였다. 코팅 시 노즐–기판 거리는 약 15 cm로 유지하였으며, 분사 시간은 약 3±1 s 범위 내에서 10회 반복 분사하였다. 최대한 이러한 조건을 유지하여CNT 층의 균일한 도포와 재현성을 확보하고자 하였다. 구체적인 코팅 조건 및 사용 기판의 특성은
Table 1에 요약하였다.
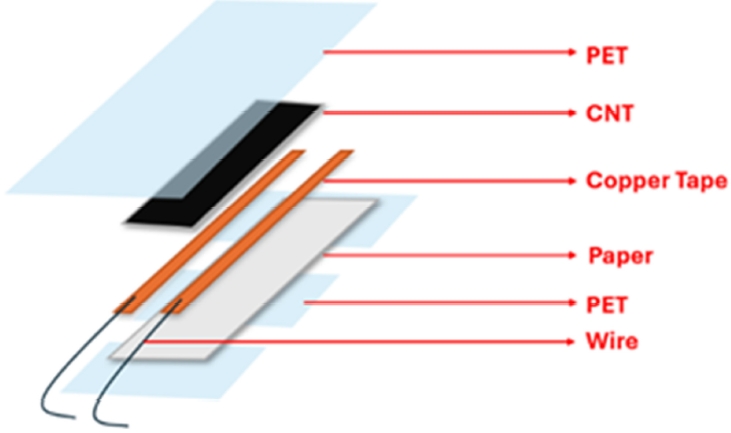
센서의 구조는
Fig. 2에 제시된 모식도와 같이 구현하였다. 앞면에서는 종이 기판 위에 폭 5 mm의 CNT 코팅층이 형성되도록 하였으며, 코팅 영역 양 끝에는 전극으로서 구리테이프를 부착하고 외부 계측 장비와 연결하기 위한 전선을 배선하였다. 또한 기계적 안정성과 외부 충격에 대한 내구성을 높이기 위해 앞면 전체에 두께 110 μm의 PET 필름을 부착하였다. 뒷면에서는 기판의 굽힘이 원활하게 이루어지도록 PET 필름을 세 구역으로 분할하여 부착함으로써 기계적 유연성과 내구성을 동시에 확보하고자 하였다. 이러한 층별 구조를 통해 CNT 층은 변형에 따른 전기적 신호 변화를 감지하고, 구리테이프는 전기 신호를 외부 회로로 전달하며, PET 필름은 앞·뒷면에서 소자를 보호하면서도 반복적인 굽힘 변형에 적합하도록 설계되었다.
또한 전극 연결부의 접촉저항 영향을 확인하기 위하여 동일 조건으로 제작된 센서 10개를 반복 측정하였다. 그 결과 접촉부 저항은 전체 초기 저항의 1% 미만으로 나타났다. 이를 통해 구리테이프 전극의 접촉저항은 센서 성능에 유의미한 영향을 주지 않으며, 센서의 응답 특성은 CNT 층의 저항 변화에 의해 결정됨을 확인하였다.
2.3 센서 제작
Fig. 3은 스프레이 코팅 과정을 포함하여 10회 코팅 후의 결과를 보여준다. (left)는 스프레이 장치와 기판의 모습, (right)는 코팅이 완료된 센서의 모습을 나타낸다.
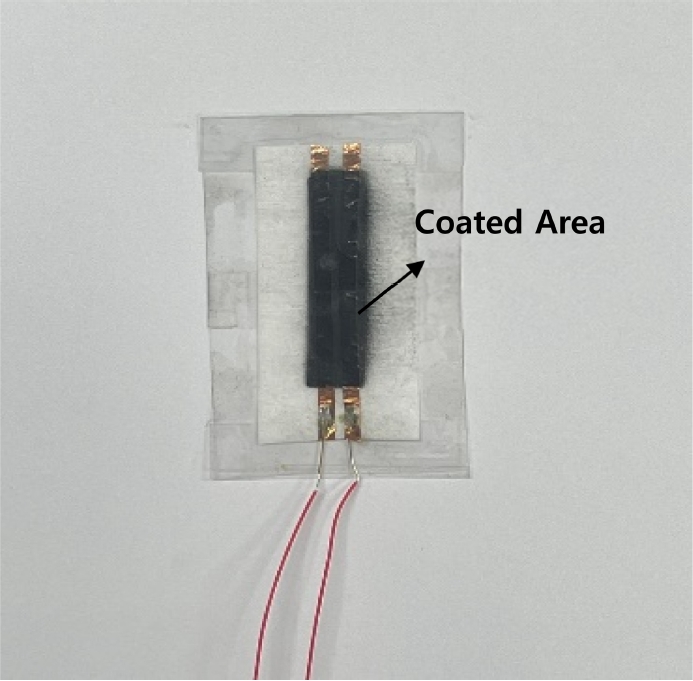
Fig. 4에는 제작이 완료된 센서의 최종 외형을 제시하였다.
MWCNT (1 wt%, 0.25 g), IPA (24.5 g), Triton-X-100 (1 wt%, 0.25 g)을 혼합하여 25 g의 잉크를 2회 제조하였고, 총 50 g의 잉크를 확보하였다. 제조된 잉크는 초음파 분산기를 이용하여 1시간 동안 분산하였으며, 이후 교반기(500 rpm)를 사용하여 20분간 추가로 혼합하였다.
두께 300 μm, 크기 40 mm × 30 mm의 기판에 CNT는 폭 5 mm의 선형 패턴으로 코팅하였으며, 코팅 영역 양 끝에는 구리테이프를 두 줄 부착하였다. 코팅 횟수는 센서 특성 확보를 위한 실험 조건 중 하나로 설정하였으며, 본 연구에서는 기판 선정 실험과 동일한 조건에 따라 총 10회 반복 코팅을 수행하였다. 이후 상온에서 1시간 동안 자연 건조하였다. 센서의 내구성과 반복성 향상을 위하여, 두께 110 μm의 PET 필름을 센서 양면에 부착하였다. 최종적으로 크기 50 mm × 40 mm, 두께 약 520 μm의 스트레인 센서를 완성하였다.
또한 본 연구에서는 스프레이 코팅의 반복성을 확보하기 위하여 분사 거리(15 cm), 분사 시간(3 s)을 최대한 일정하게 유지하였다. 각 코팅 사이에는 5분의 간격을 두어 용매가 부분적으로 증발한 후 다음 층이 형성되도록 하였으며, 동일 조건으로 제작된 시편 5개에 대한 초기 저항 편차는 ±10% 이내로 확인되었다. 이를 통해 Hand-held 스프레이 방식에서도 적절한 공정 재현성을 확보할 수 있음을 확인하였다.
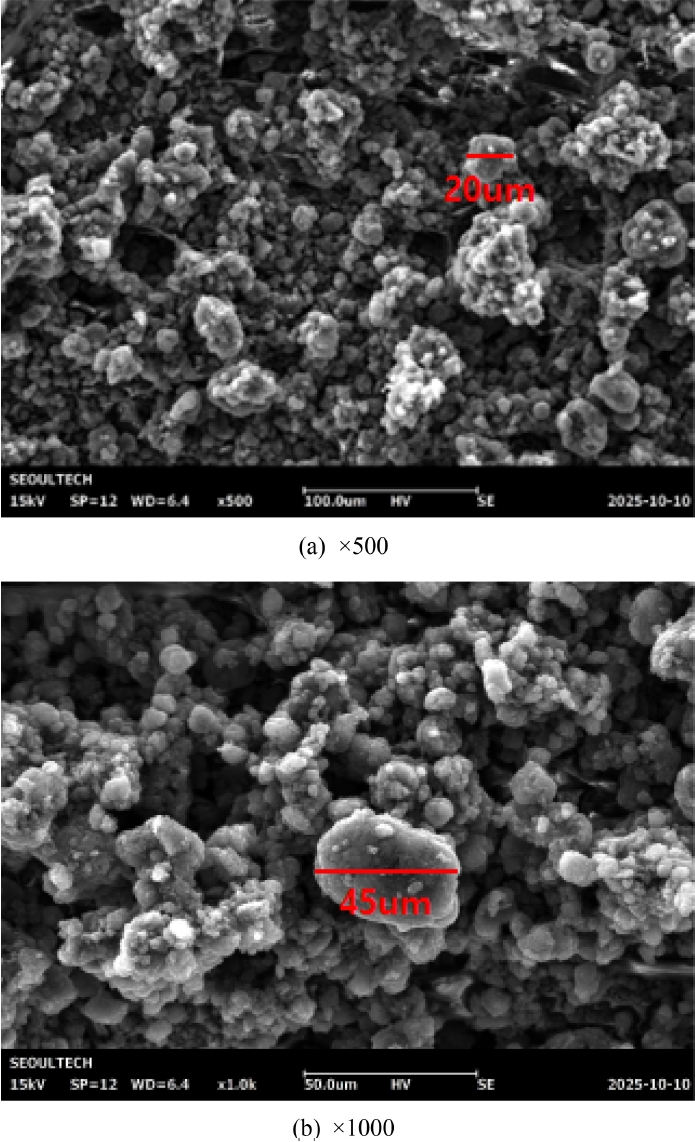
또한, 코팅된 CNT 층의 미세 구조를 확인하기 위해 주사전자현미경(SEM) 분석을 수행하였다.
Fig. 5는 10회 스프레이 코팅 후 무진지 기판 위에 형성된 CNT 층의 표면을 500배 및 1,000배 배율로 관찰한 결과를 나타낸다. 낮은 배율(
Fig. 5(a))에서는 CNT 입자들이 기판 전면에 균일하게 분포하며 다층 구조를 형성하고 있음을 확인할 수 있다. 높은 배율(
Fig. 5(b))에서는 입자 간 결합이 조밀하게 이루어져 연속적인 전도 경로가 형성된 것을 관찰할 수 있었다. 이러한 결과는 스프레이 코팅 공정을 통해 CNT 잉크가 기판 표면에 안정적으로 적층되어, 균일한 전도성 네트워크가 형성되었음을 의미한다.
2.4.1 공정 조건 확립을 위한 실험
센서의 출력 특성은 기판의 종류, CNT 코팅 횟수, 그리고 패키징 방법에 따라 달라질 수 있다. 특히, 사용 환경에서의 압력 변화에 대해 센서가 얼마나 민감하고 안정적으로 반응하는지는 이러한 조건들에 크게 영향을 받는다. 이에 따라, 센서 제작 시 어떤 기판과 코팅 횟수, 패키징 공정을 적용하는 것이 가장 적절한지 확인하고자 본 실험을 진행하였다.
각 조합에 대해 10, 20, 30 g의 추를 순차적으로 올려 하중을 가하고, 오실로스코프를 통해 센서 출력 값의 변화를 관찰하여 조건별 반응 차이를 비교하였다.
2.4.2 스트레인 센서 특성 평가 실험
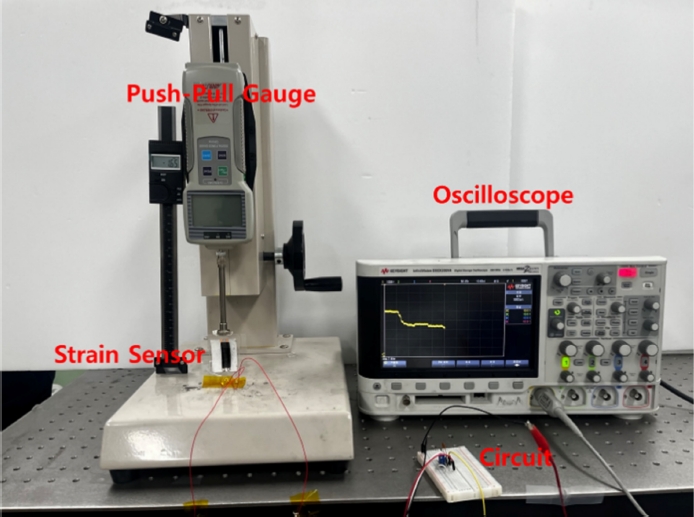
센서의 굽힘에 따른 반응을 정량적으로 분석하기 위해,
Fig. 6와 같이 푸쉬-풀 게이지를 사용하였다. 푸쉬-풀 게이지를 통해 길이 방향으로 힘을 받게 되면 소자 전체에 굽힘이 일어나게 된데, 이러한 굽힘 각도를 측정하여 특성을 분석하였다[
5].
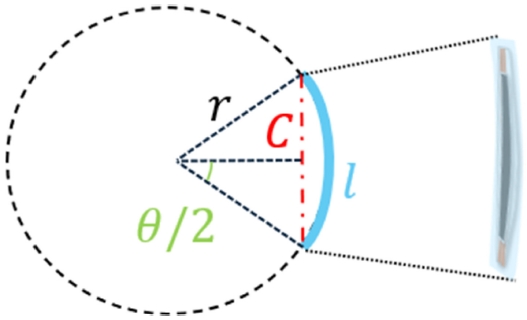
Fig. 7에 따르면, 굽힘 시 센서 양 끝 사이의 직선 거리
C는
식(1)과 같이 기하학적 관계로부터 계산된다.
여기서
r은 반지름,
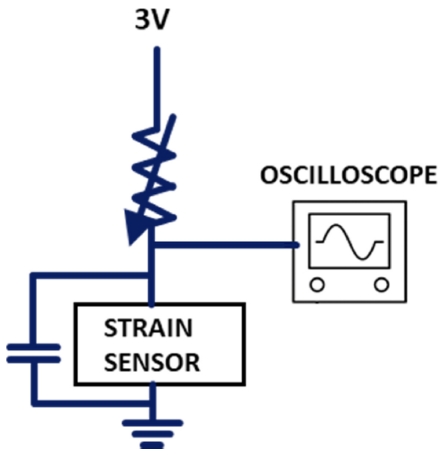
l은 호의 길이로 센서의 길이이다. 센서가 굽힘을 받게 되면 저항이 변화하게 되는데, 이 저항 변화는
Fig. 8과 같이, 가변저항과 센서를 직렬로 연결한 전압 분배회로를 이용하여 측정하였다. 이 때, 발생하는 전압 변화는 오실 로스코프를 통해 측정하였으며, 전압변화를 기반으로 최종적으로 민감도를 계산하여 특성을 분석하였다.
3. 실험
3.1 공정 조건 확립을 위한 실험에 따른 센서 특성 분석
본 연구는 스트레인 센서의 민감도에 영향을 미치는 주요 제작 변수인 기판의 종류, CNT 코팅 횟수, 패키징 방식에 따라 센서 특성이 어떻게 변화하는지를 실험적으로 분석하였다. 센서의 민감도(Sensitivity)는
식(2)와 같이 정의된다.
3.1.1 기판 종류에 따른 특성 분석
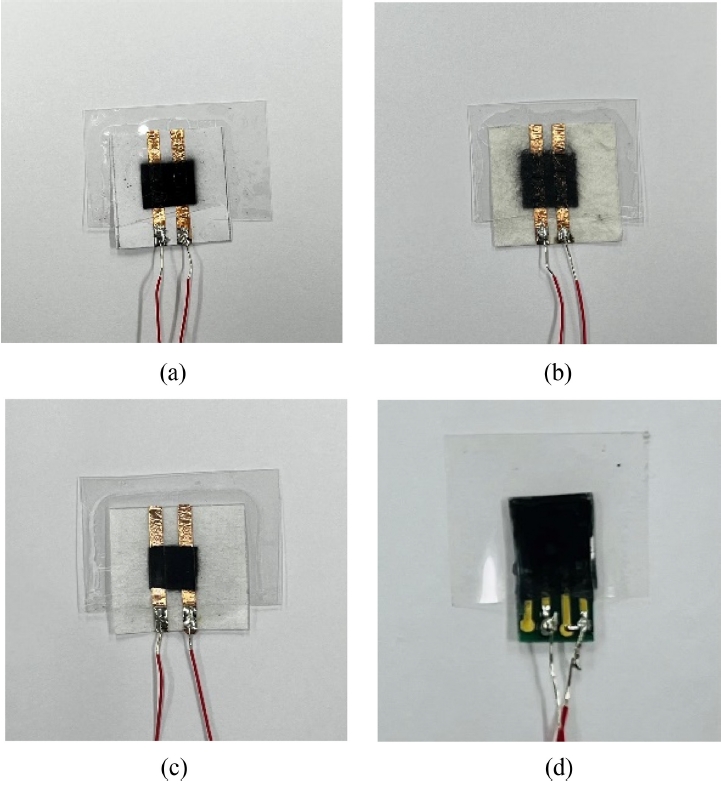
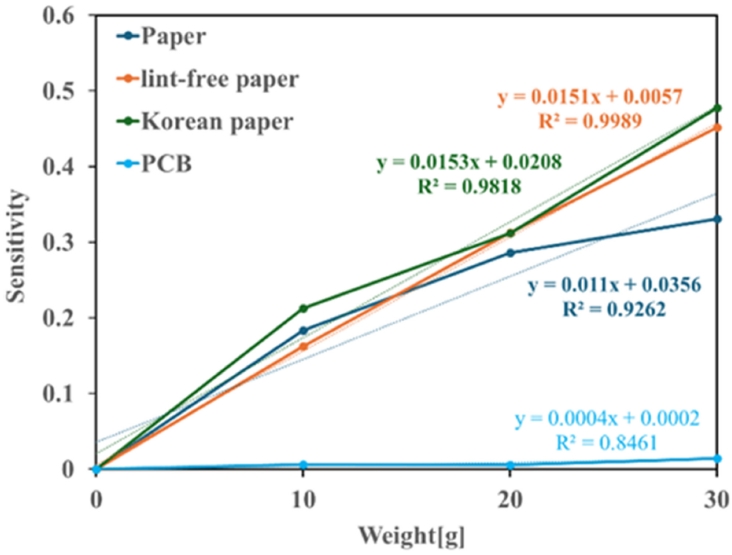
Fig. 9은 종이, 무진지, 한지, PCB의 네 가지 기판을 기반으로 제작된 센서의 최종 모습을 보여준다. 센서 성능에 기판의 특성이 어떤 영향을 주는지 확인하기 위해, 동일한 CNT 코팅 조건에서 종이, 무진지, 한지, PCB의 네 가지 기판을 비교하였다. 코팅은 각 기판에 10회 반복하여 진행하였으며, 그 결과 초기 저항은 종이 기판이 524 Ω, PCB 기판이 230 Ω, 무진지가 약 10 kΩ, 한지가 약 9.5 kΩ으로 나타났다. 이는 기판마다 CNT가 얼마나 잘 붙고 연결되었는지를 보여주는 지표로 해석할 수 있다.
각 기판에 대한 민감도 특성 결과가
Fig. 10에 나타나 있다. 결과로부터 무진지를 사용한 센서가 가장 높은 민감도(기울기 0.0151)와 가장 뛰어난 선형성(R
2 = 0.9989)을 보이며, 무게 변화에 따라 저항이 일정하게 잘 증가함을 확인할 수 있다. 한지로 제작된 센서의 경우 민감도(0.0153)는 가장 높았지만, 초기부터 저항이 다소 높게 시작되어 작은 하중에 민감하게 반응하는 경향이 나타났다(R
2 = 0.9818). 종이 기판은 반응하는 정도(기울기 0.011)가 조금 낮았고 선형성도 비교적 떨어지는 편이었다(R
2 = 0.9262). 반면, PCB 기판은 민감도(0.0004)와 선형성(R
2 = 0.8461) 모두 가장 낮아 무게 변화에 거의 반응하지 않는 수준이었다.
이러한 결과는 각 기판의 표면 상태나 유연성 차이에서 비롯된 것으로 보인다. 특히 무진지는 표면이 매끄럽고 잘 휘어지는 특성 덕분에 외부 힘이 CNT 층에 효과적으로 전달되어 저항 변화가 더 뚜렷하게 나타난 것으로 판단된다.
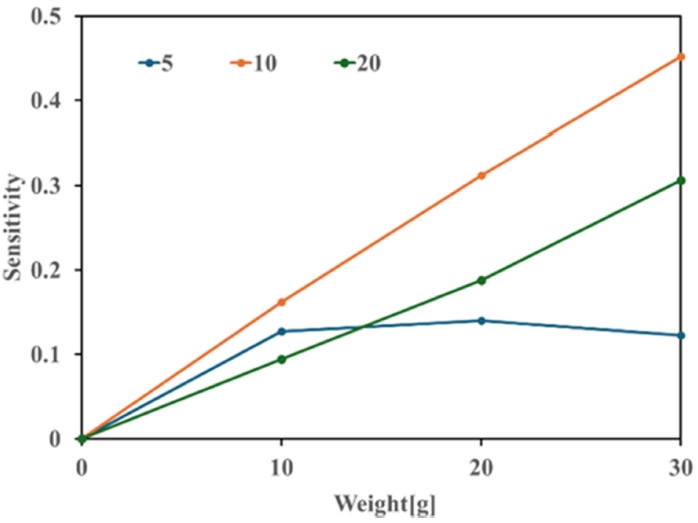
3.1.2 CNT 코팅 횟수에 따른 특성 분석
Fig. 11은 CNT 코팅 횟수에 따른 민감도 결과를 보여준다. CNT의 코팅 횟수가 전도성 네트워크 형성과 민감도에 미치는 영향을 정량적으로 분석하기 위하여, 동일한 무진지 기판에 CNT를 각각 5회, 10회, 20회 스프레이 코팅하여 샘플을 제작하였다. 초기 저항은 각각 5회 Sensitivity R R 코팅 시 약 150 kΩ, 10회 및 20회 코팅 시에는 모두 약 10 kΩ으로 측정되었다. 이는 10회 이상 코팅 시 전도성 네트워크가 충분히 형성되어 저항 값이 포화됨을 의미한다.
Fig. 11은 각각의 코팅 조건에 대한 민감도 측정 결과를 나타낸 것으로 10회 코팅된 센서가 가장 우수한 성능을 나타냈으며, 이는 전도성 확보와 기계적 민감도 간의 균형이 가장 잘 유지된 조건으로 해석된다. 5회 코팅의 경우 CNT 네트워크 형성이 불완전하여 접촉 저항의 불안정성과 낮은 신호 강도가 나타났으며, 20회 코팅된 샘플은 CNT 층이 과도하게 형성되어 변형이 효과적으로 전달되지 못함에 따라 민감도가 오히려 저하되었다. 이는 CNT 코팅이 너무 적을 경우 전도성 확보가 제한되고, 과도할 경우 기계적 민감도가 저하됨을 확인할 수 있다.
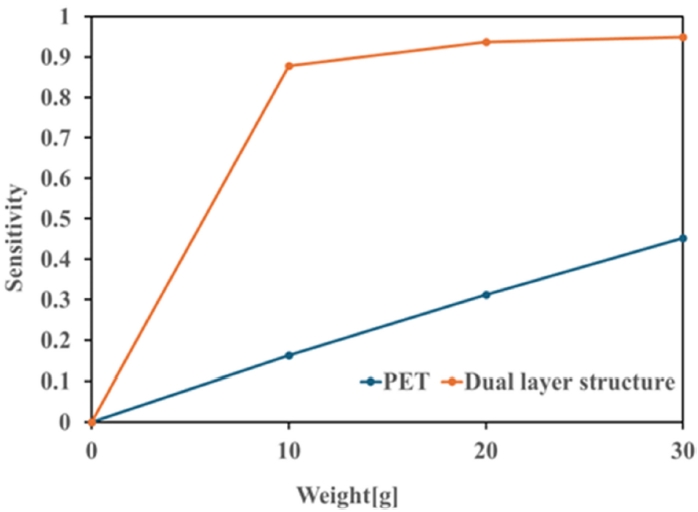
3.1.3 패키징 방식에 따른 특성 분석
Fig. 12은 PET 단일 필름과 이중 구조(CNT가 코팅된 두 기판을 코팅 면이 서로 마주보도록 겹친 구조)를 적용한 센서의 민감도 측정 결과를 보여준다. 패키징 구조가 센서의 기계적 보호 및 응력 전달에 미치는 영향을 평가하기 위하여, PET 단일 필름과 이중 구조(CNT가 코팅된 두 기판을 코팅 면이 서로 마주보도록 겹친 구조)를 적용한 센서를 비교하였다. 초기 저항은 PET 단일층 적용 시 약 10 kΩ, 이중 구조 적용 시 약 6.8 kΩ으로 측정되었으며, 이는 이중 구조에서 보다 밀집된 CNT 네트워크가 형성되었음을 알 수 있다. 전체적으로 이중 구조 방식은 높은 민감도를 나타냈으나, 구조적 복잡성으로 인해 일부 비선형 응답이 관찰되었다. 반면, PET 단일층을 적용한 센서는 상대적으로 낮은 민감도를 보였으나, 패키징의 내구성과 유연성이 우수하고 기계적 변형에 따른 저항 변화가 선형적으로 안정되게 나타났다. 따라서, 센서의 응답 특성과 내구성을 종합적으로 고려할 때, PET 단일층 패키징이 보다 적합한 선택으로 판단된다.
수행한 여러 실험을 종합해보면, 기판 재질, CNT 코팅 횟수, 패키징 방식이 스트레인 센서의 성능에 유의미한 영향을 미침이 확인되었으며, 각 공정 요소는 상호 연계적으로 고려될 필요가 있다. 특히, 무진지 기판에 10회 CNT 코팅, PET 단일층 패키징을 적용한 조합이 가장 우수한 민감도 및 선형성을 보였으며, 이는 고신뢰성 스트레인 센서 개발을 위한 기반 조건으로 활용 가능할 것으로 판단된다.
3.2 스트레인 센서 특성 평가 실험
앞선 3.1의 결과, 무진지를 기판으로 한 10회 코팅의 PET 패키징 센서가 적절하다는 결론으로부터 스트레인 센서를 제작하였다.
본 절에서는 무진지 기반 CNT 스트레인 센서의 기계적 민감도 특성을 정량적으로 평가하고, 반복 굽힘-복원 실험을 통해 응답 안정성과 신뢰성을 분석하였다. 이를 위해 푸쉬-풀 게이지를 활용하여 센서에 일정 범위의 변형률(0-1.4%) 및 굽힘 각도(0-20
o, 1
o 간격)를 반복적으로 인가하였으며, 이에 따른 전기적 저항 변화와 민감도를 측정하여 Gauge Factor를 구하였다. Gauge Factor는
식(3)을 통해 정의된다.
여기서 ΔR은 인가된 변형률 Δε에 따른 저항 변화량이며, R0는 초기 저항이다. 또한, 굽힘 변형에 대한 실제 변형률 Δε은 센서의 두께 h와 곡률 반지름 r을 ε = h/2r 기반으로 계산하였다.
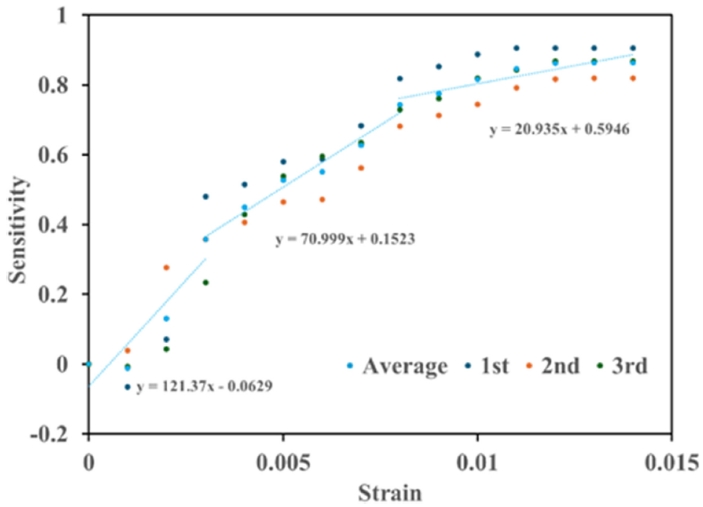
굽힘 실험을 통해 변형률 구간별 Gauge factor을 계산한
Fig. 13에 따르면, 0-0.3% 구간에서는 GF ≈ 121.370, 0.3-0.8% 구간에서는 GF ≈ 70.999, 0.8-1.4% 구간에서는 GF ≈ 20.935으로 도출되었다. 이는 센서가 낮은 변형률 구간에서 높은 민감도를 보이며, 변형률이 증가함에 따라 민감도가 감소하는 경향을 나타낸다. 이러한 특성은 낮은 응력 하에서는 CNT 네트워크가 민감하게 저항 변화를 유도하지만, 일정 수준 이상의 응력이 가해질 경우 전도 경로의 포화 또는 구조적 손상에 의해 감도 저하가 발생하는 것으로 해석된다.
Table 2에서 나타나듯, 본 센서는 좁은 변형 범위(0-0.3%)에서 GF ≈ 121.370을 기록하여 기존 연구의 최고 수준인 Singh et al. (2022) [
10]의 GF ≈ 118을 상회하였다. 또한 0.3-0.8%와 0.8-1.4% 구간에서도 각각 GF ≈ 70.999와 20.935를 보여, 변형이 커짐에 따라 민감도가 감소하더라도 여전히 기존 연구[
4,
5,
9]에서 보고된 값들과 비교해 우수한 성능을 유지하였다. 특히 변형 허용 범위는 최대 1.4%로 제한적이지만, 해당 범위 내에서의 정밀 감지 능력은 기존 CNT 기반 센서보다 한층 개선된 것으로 평가된다.
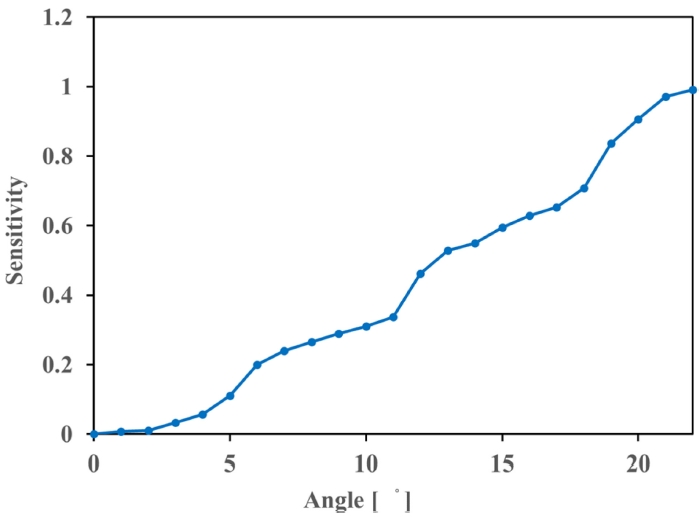
Fig. 14에 나타난 바와 같이, 센서는 0
o에서 20
o까지 1
o 단위의 각도 변화에 따라 저항 변화(Sensitivity)가 점진적으로 증가하였다. 일부 구간에서 비선형성이 존재하지만, 전체적으로 각도 증가에 따른 Δ
R/R의 단조적 상승 경향이 유지되었으며, 이는 센서가 미세한 굽힘 변화에도 반응함을 보여준다.
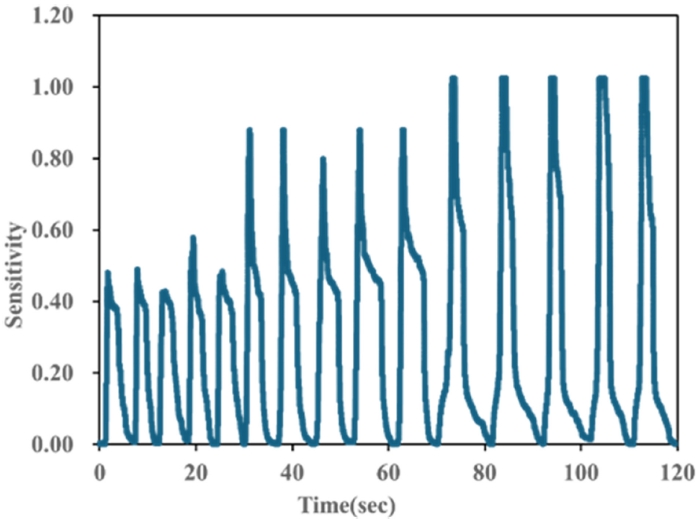
또한,
Fig. 15에 나타낸 바와 같이, 5
o, 15
o, 20
o 굽힘을 각각 5회 반복하여 총 120초 동안 민감도 변화를 측정한 결과, 각도 증가에 따라 최대 Δ
R/R 값이 뚜렷하게 증가하는 경향을 보였다. 5
o에서는 최대 민감도가 약 0.5 였으나, 15
o에서는 약 0.9, 20
o에서는 약 1.0 이상으로 나타나 각도 변화가 센서의 전기적 응답 폭에 직접적인 영향을 미침을 확인할 수 있었다. 반복 변형 시 일관된 파형과 빠른 복원 특성이 유지되어, 센서가 반복 사용 환경에서도 우수한 반복성과 안정성을 보유함을 확인하였다.
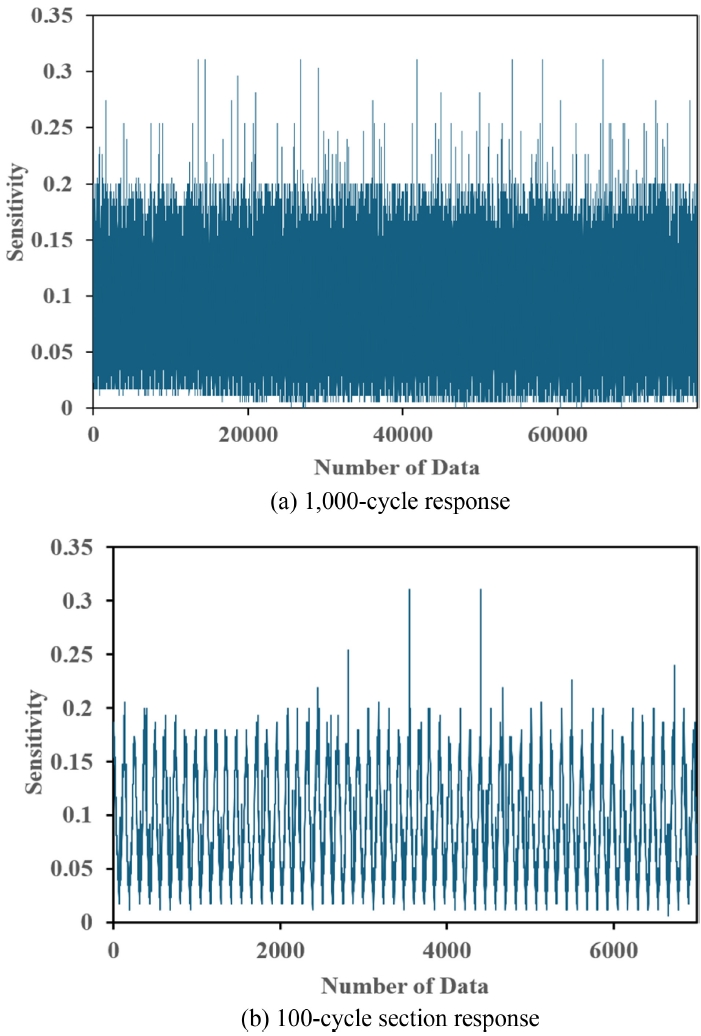
Fig. 16(a)는 센서에 5
o 굽힘을 약 1,000번 반복 가했을 때의 민감도를 나타낸 그래프이다. 전체 측정 구간 동안 민감도 값이 일정한 패턴을 유지하며 큰 변동 없이 반복적으로 응답한다. 이는 센서가 반복적인 외부 응력 인가에도 구조적 손상 없이 안정적인 전기적 응답을 유지함을 의미하며, 실시간 모니터링 환경에서의 높은 반복성 및 신뢰도를 확보할 수 있음을 보여준다. 또한
Figs. 16(b)는
16(a) 그래프에서 대표적인 구간으로서 100회 굽힘 테스트를 보여준다.
종합적으로, 본 실험을 통해 무진지 기반 CNT 스트레인 센서는 낮은 변형률 구간에서 우수한 민감도를 가지며, 굽힘 각도의 세밀한 변화에도 안정적인 응답을 제공함을 확인하였다. 또한 5o, 15o, 20o 반복 굽힘 실험에서 각도 증가에 따라 최대 ΔR/R 값이 뚜렷하게 상승하고, 반복적인 변형-복원 사이클에서도 민감도가 유지되어, 본 센서가 다양한 정밀 스트레인 감지 시스템 또는 웨어러블 센서로서 적용 가능성이 높음을 확인하였다.
3.3 스트레인 센서의 신체 적용 가능성 평가
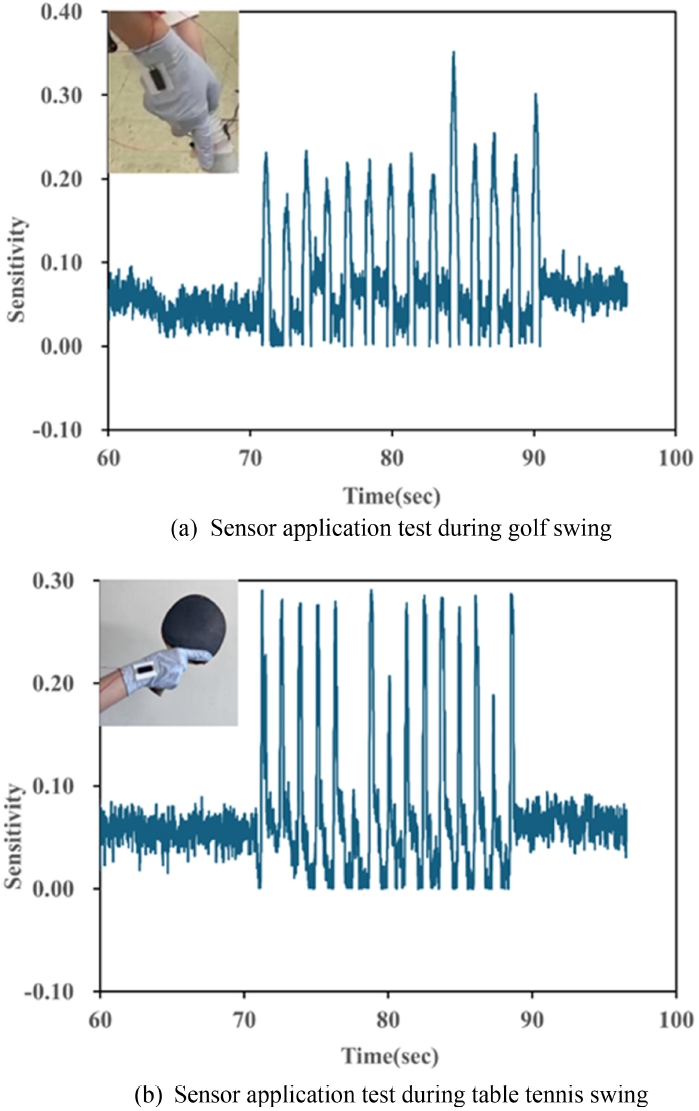
본 절에서는 무진지 기반 CNT 스트레인 센서를 인체에 부착하여 실제 운동 환경에서의 동작 감지 성능을 평가하고, 센서의 신체 적용 가능성을 검증하였다. 이를 위해 센서를 착용자의 손목 부위에 직접 부착한 후, 골프 스윙 및 탁구 동작 수행 시 발생하는 손목의 굽힘 움직임에 따른 전기적 응답을 측정하였다. 측정된 신호는 시간에 따른 출력 전압 변화로 기록되었으며, 이를 통해 미세 동작 감지 능력 및 반복 동작에 대한 복원성 여부를 분석하였다.
골프 및 탁구는 일반적으로 손목을 고정한 상태에서 동작을 수행하는 것이 기본 자세이나, 실제 운동 수행 중에는 손목이 미세하게 흔들리는 경우가 자주 발생한다. 본 실험에서는 이러한 손목의 미세한 흔들림에 대해 센서가 민감하게 반응하여 출력 신호를 생성하는 것이 관찰되었다.
Figs. 17(a)는 골프 스윙 동작,
17(b)는 탁구 스윙 동작에서 기록된 출력 신호를 각각 보여준다. 출력 신호 분석 결과, 손목이 고정된 자세를 유지하고 운동하는 경우 일정한 출력을 유지하는 반면, 손목의 위치가 불안정하거나 미세한 흔들림이 발생하는 상황에서는 진폭 및 주기의 불규칙성이 증가하였다. 이는 해당 센서가 단순한 관절의 굽힘뿐만 아니라 자세 안정성 및 미세한 움직임 변화를 정량적으로 감지할 수 있는 민감도를 갖추고 있음을 확인할 수 있다.
또한, 동일 동작을 반복 수행하였을 때에도 센서의 출력은 초기 상태로 안정적으로 복원되었으며, 반복 주기 간의 신호 차이가 크지 않게 유지되었다. 이는 센서가 반복적인 기계적 응력 하에서도 구조적 안정성을 유지하며, 높은 신뢰도의 전기적 응답을 지속적으로 제공할 수 있음을 의미한다.
종합적으로, 무진지 기반 CNT 스트레인 센서는 인체 부착 환경에서도 우수한 동작 감지 성능을 발휘하였으며, 운동 중 발생하는 미세한 흔들림까지 정밀하게 감지할 수 있는 가능성을 입증하였다.
Fig. 17은 특정 동작 시 민감도 응답에 피크가 나타나 동작 이벤트를 민감하게 감지할 수 있음을 보여준다. 다만, 본 연구에서는 각도·각속도와 Δ
R/R 간의 정량적 상관관계까지는 제시하지 못하였다. 이는 측정장비의 한계로 인한 부분이며, 향후 IMU 등과 병행 측정을 통해 민감도와 각도·각속도 간 상관성을 규명한다면 센서의 정밀성과 신뢰성을 보다 명확히 제시할 수 있을 것이다.
4. 결론
본 연구에서는 간단한 스프레이 코팅 공정을 통해 제작이 가능하며, 미세 변형 감지에 최적화된 무진지 기반 CNT 스트레인 센서를 개발하였다. 다양한 기판 재질과 CNT 코팅 횟수, 패키징 방식에 따른 센서 특성을 비교 분석한 결과, 무진지 기판과 10회 코팅, 단일 PET 패키징 센서가 우수한 민감도와 선형성을 나타냄을 확인하였다. 따라서 위 센서는 높은 민감도와 우수한 선형성, 반복 사용에 따른 내구성을 동시에 만족시키는 최적 조건으로 도출되었다.
정량적인 변형률 실험에서는 0-1.4% 구간에서 선형적인 전압 변화를 보였으며, 특히 0-0.3%의 변형률 구간에서 평균 Gauge factor가 121.370로 나타나는 등 매우 높은 민감도를 확인하였다. 또한, 0-20o 범위에서 1o 단위로 측정이 가능하였으며 여러 번 반복실험에도 균일한 특성을 나타내었다. 이러한 특성으로 제작된 소자가 세밀한 각도 변화 감지가 가능함을 실험을 통해 확인할 수 있었다.
인체 착용 실험에서는 손목에 부착하여 실제 운동 동작을 측정한 결과, 운동 시 발생하는 미세 움직임에 민감하게 반응하는 전기적 신호가 검출되었으며, 동작 반복 시 높은 재현성과 신뢰성이 확보됨을 확인하였다.
이러한 결과를 종합하면, 본 연구에서 개발한 무진지 기반 CNT 스트레인 센서는 단순한 제작 공정으로 우수한 민감도, 정밀도, 반복 신뢰성을 확보할 수 있음을 보여주었다. 특히 미세 변형 및 각도 변화를 정량적으로 감지할 수 있는 특성을 기반으로, 스포츠 동작 모니터링에서의 활용 가능성을 확인할 수 있었다.
FOOTNOTES
-
ACKNOWLEDGEMENT
이 연구는 서울과학기술대학교 교내 일반과제 연구비 지원으로 수행되었습니다.
Fig. 1Working principle of CNT-based strain sensing
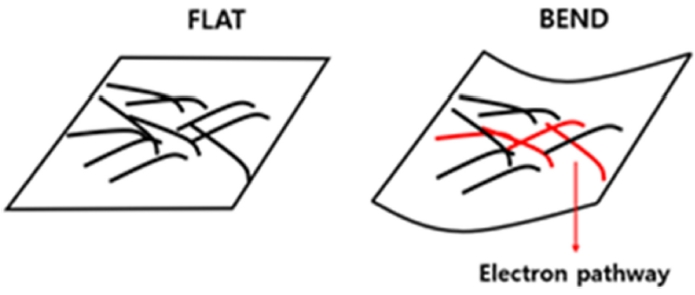
Fig. 2Structural schematics of the fabricated paper-based strain sensor
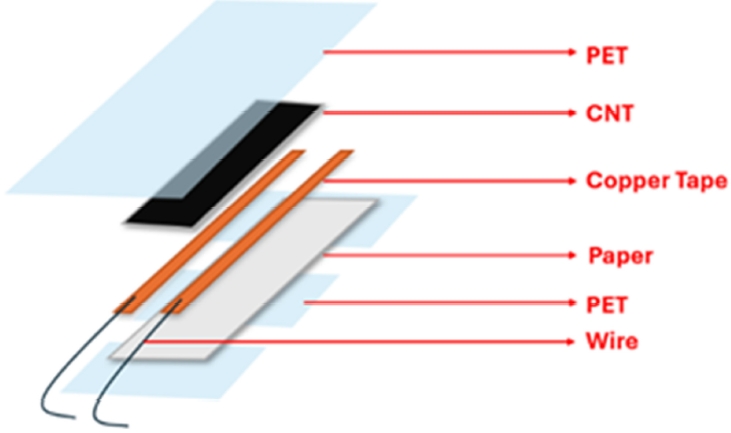
Fig. 3Spray coating apparatus (left) and coated sample (right)

Fig. 4Completed strain sensor on lint-free paper substrate
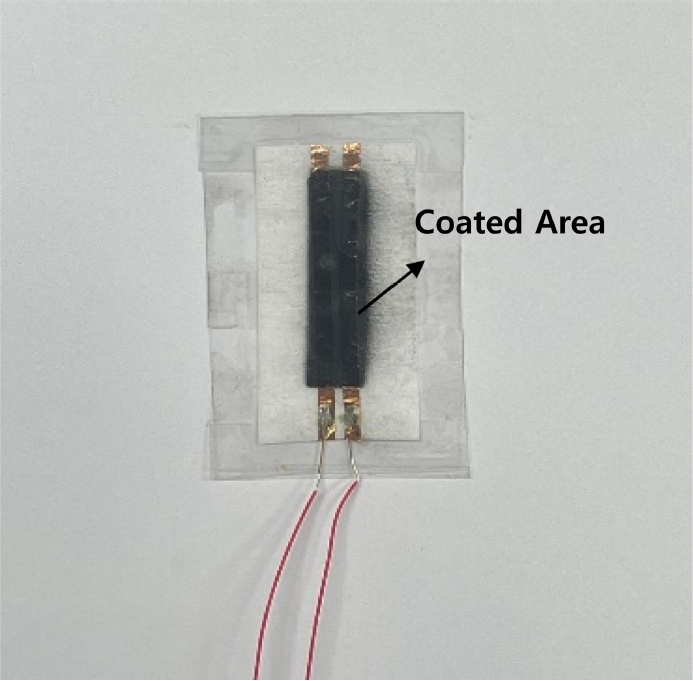
Fig. 5SEM images of the CNT layer formed on the lint-free paper substrate after 10 spray coatings
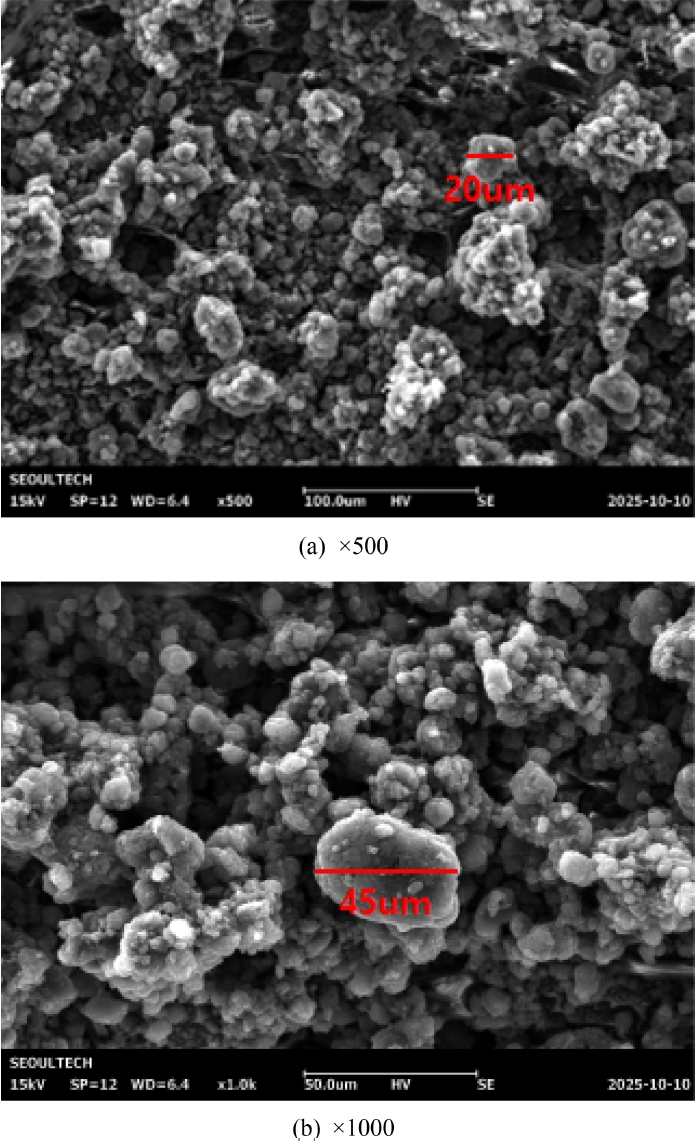
Fig. 6Experimental setup for the strain sensor measurement
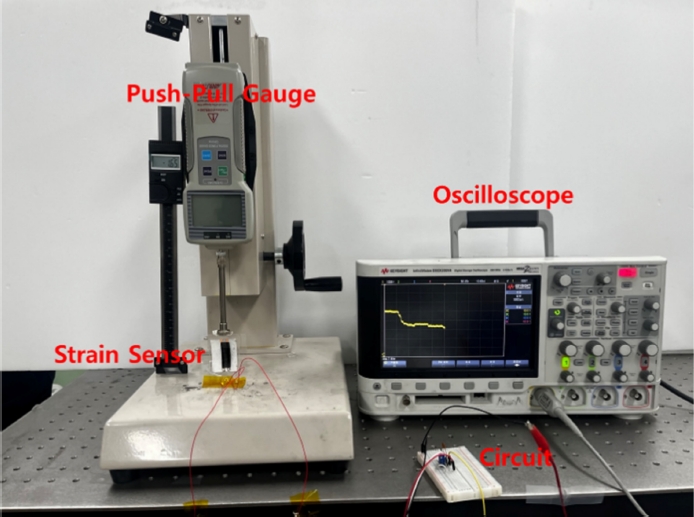
Fig. 7Geometrical relationship between the height and the bending angle
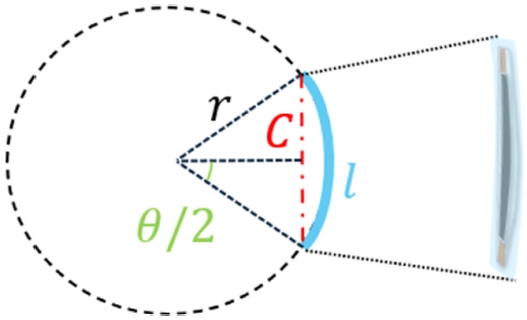
Fig. 8Circuit configuration using voltage divider
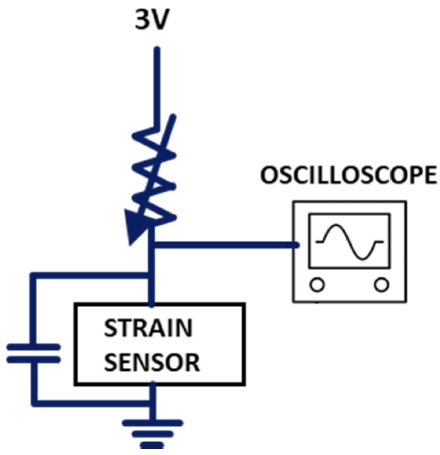
Fig. 9Sensors fabricated using (a) common paper substrate, (b) Hanji substrate, (c) lint-free paper substrate, and (d) PCB substrate
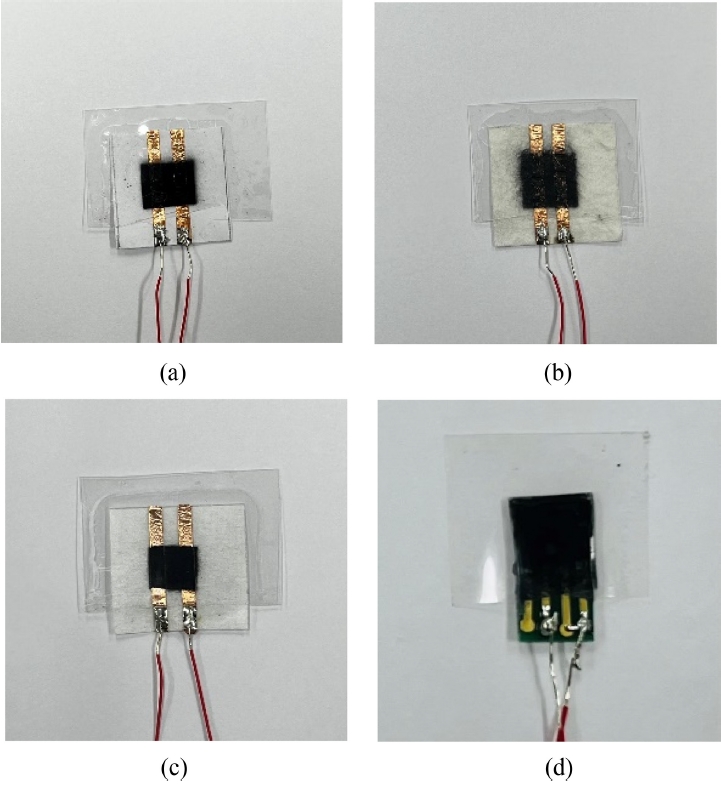
Fig. 10Results of Sensitivity response comparison test of each substrate
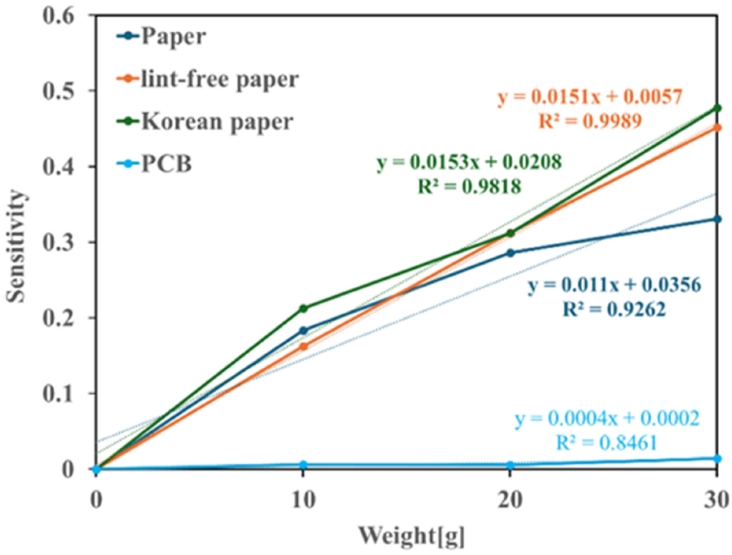
Fig. 11Sensitivity results with respect to coating cycles
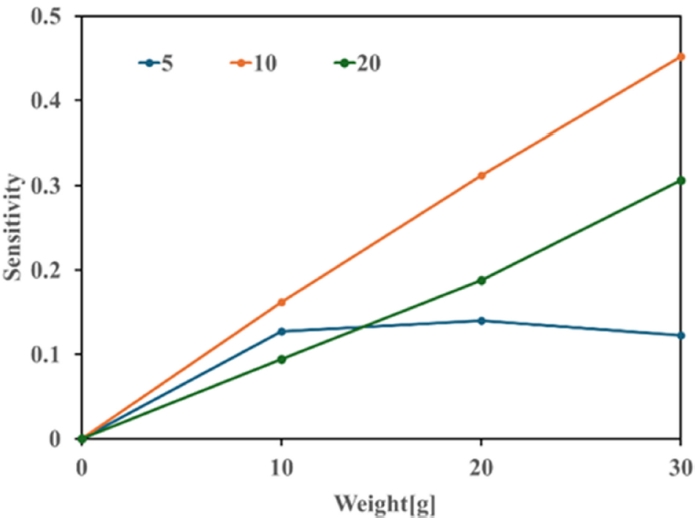
Fig. 12Sensitivity comparison between single-layer and dual-layer structures
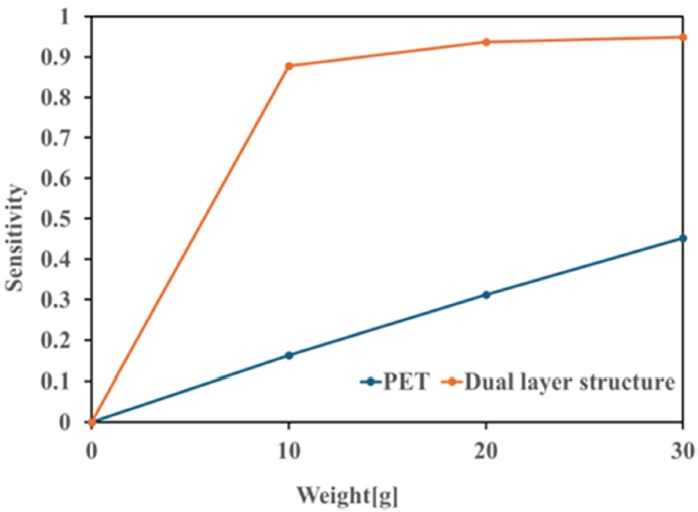
Fig. 13Bending test results of the lint-free paper
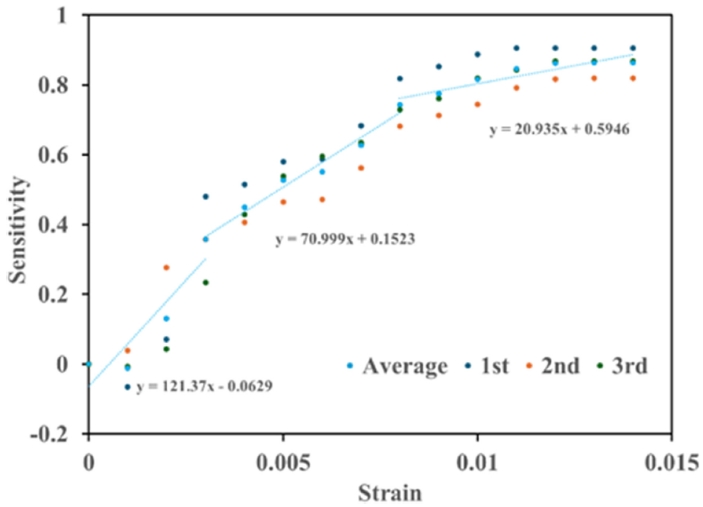
Fig. 14Evaluation of bending characteristics in the 0-20o range
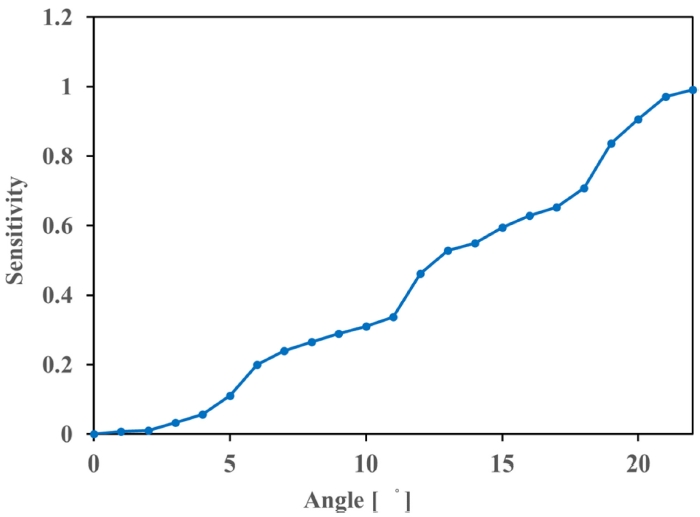
Fig. 15Relative resistance change (Sensitivity) during repeated bending at 5o, 15o, and 20o (five cycles each)
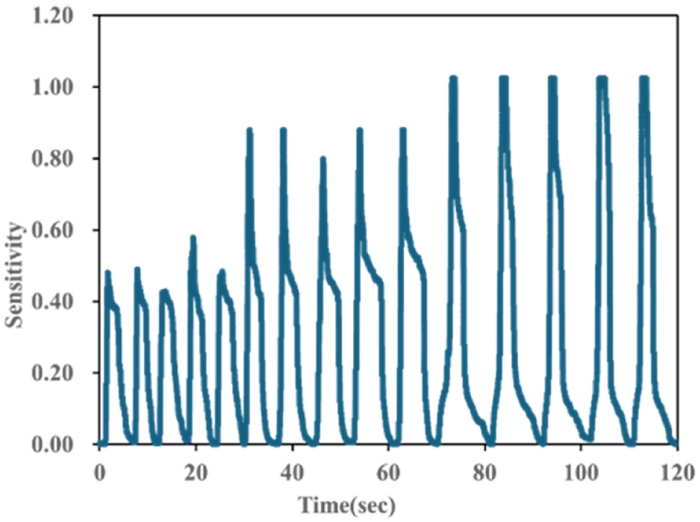
Fig. 16Repetitive bending test results at 5o bending angle
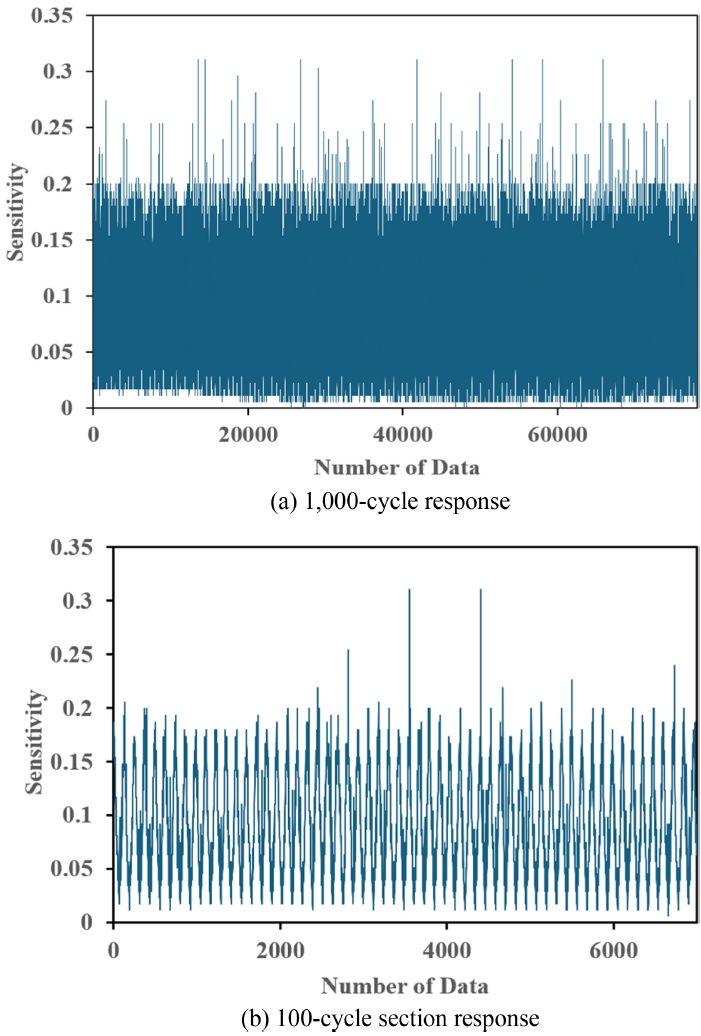
Fig. 17Application test results of the fabricated strain sensor in sports motion experiments
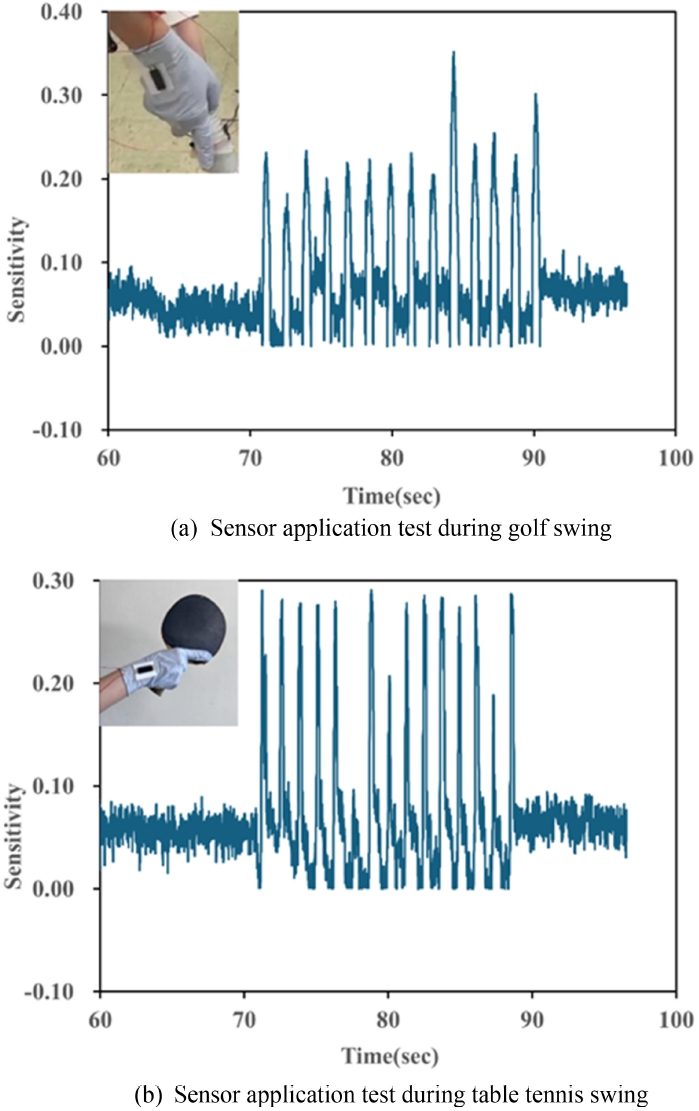
Table 1.Spray-coating parameters used in this work
Table 1.
|
Parameter |
Value / Setting |
|
Nozzle diameter |
0.7 mm (airbrush) |
|
Atomizing pressure |
14 psi (≈ 0.97 bar) |
|
Nozzle–substrate distance |
~15 cm |
|
Spray duration per pass |
3 s ± 1s |
|
Passes |
10 |
|
Drying between passes |
Room temperature, 5 min after each pass |
|
Final drying |
Room temperature, 60 min (after 10th pass) |
|
Substrate pre-treatment |
None |
Table 2.Comparison of gauge factor (GF) and stretchability/strain range between this work and previous studies
Table 2.
|
Reference |
Gauge factor (GF) |
Stretchability / Strain range & notes |
|
Yan et al., 2021 [1] |
Varies widely |
Wide range depending on method |
|
Kanoun et al., 2014 [2] |
Varies by fabrication |
Application-dependent |
|
Kanaparthi et al., 2016 [3] |
Comparable or higher than CNT/graphene sensors |
Low strain sensitivity |
|
Wang et al., 2018 [4] |
35.75 (tunable) |
Up to 45% strain |
|
Thiyagarajan et al., 2022 [5] |
Max 31 |
Moderate bending/strain |
|
Michalet et al., 2015 [6] |
Low hysteresis, reproducible |
Moderate strain range |
|
Wang et al., 2023 [7] |
Varies widely |
Wide range depending on method |
|
Waiyat et al., 2018 [8] |
13.07 (tensile), 12.87 (compressive) |
Tensile & compressive bending |
|
Jehu et al., 2021 [9] |
~linear, low hysteresis |
Up to 40% strain |
|
Singh et al., 2022 [10] |
118 |
0-0.35% strain |
|
This work, 2025 |
121.370 (0-0.3%), 70.999 (0.3-0.8%), 20.935 (0.8-1.4%) |
Bending up to 1.4% strain; 0–20o (1o resolution) |
REFERENCES
- 1. Yan, T., Wu, Y., Yi, W., Pan, Z., (2021), Recent progress on fabrication of carbon nanotube-based flexible conductive networks for resistive-type strain sensors, Sensors and Actuators A: Physical, 327, 112755.
- 2. Kanoun, O., Müller, C., Benchirouf, A., Sanli, A., Dinh, T. N., Al-Hamry, A., Bu, L., Gerlach, C., Bouhamed, A., (2014), Flexible carbon nanotube films for high performance strain sensors, Sensors, 14(6), 10042-10071.
- 3. Kanaparthi, S., Badhulika, S., (2016), Solvent-free fabrication of a biodegradable all-carbon paper based field effect transistor for human motion detection through strain sensing, Green Chemistry, 18(12), 3640-3646.
- 4. Wang, X., Li, J., Song, H., Huang, H., Gou, J., (2018), Highly stretchable and wearable strain sensor based on printable carbon nanotube layers/polydimethylsiloxane composites with adjustable sensitivity, ACS Applied Materials & Interfaces, 10(8), 7371-7380.
- 5. Thiyagarajan, K., Rajini, G. K., Maji, D., (2022), Fully printed MWCNT strain sensor over paper substrate for human motion monitoring, Flexible and Printed Electronics, 7(4), 045003.
- 6. Michelis, F., Bodelot, L., Bonnassieux, Y., Lebental, B., (2015), Highly reproducible, hysteresis-free, flexible strain sensors by inkjet printing of carbon nanotubes, Carbon, 95, 1020-1026.
- 7. Wang, R., Sun, L., Zhu, X., Ge, W., Li, H., Li, Z., Lan, H., (2023), Carbon nanotube‐based strain sensors: Structures, fabrication, and applications, Advanced Materials Technologies, 8(1), 2200855.
- 8. Wajahat, M., Lee, S., Kim, J. H., Chang, W. S., Pyo, J., Cho, S. H., Seol, S. K., (2018), Flexible strain sensors fabricated by meniscus-guided printing of carbon nanotube–polymer composites, ACS Applied Materials & Interfaces, 10(23), 19999-20005.
- 9. Jehn, J., Sautter, M., Neumaier, P., Dörsam, E., (2021), Fully inkjetprinted carbon nanotube-PDMS-based strain sensor: Temperature response, compressive and tensile bending properties, and fatigue investigations, IEEE Access, 9, 72207-72216.
- 10. Singh, K., Gupta, M., Tripathi, C. C., (2022), Fabrication of flexible and sensitive laser-patterned serpentine-structured graphene– CNT paper for strain sensor applications, Applied Physics A, 128(12), 1131.
- 11. Tortorich, R. P., Choi, J. W., (2013), Inkjet printing of carbon nanotubes, Nanomaterials, 3(3), 453-468.
- 12. Abusrair, A. H., Elsekaily, W., Bohlega, S., (2022), Tremor in Parkinson’s disease: from pathophysiology to advanced therapies, Tremor and Other Hyperkinetic Movements, 12, 29.
Biography
- Yoon Ji Yum
Undergraduate Student, Department of Mechanical and Automotive Engineering, Seoul National University of Science and Technology. Her research interests include micro/nano fabrication, MEMS, and sensors.
- Ji Hyun Park
Undergraduate Student, Department of Mechanical and Automotive Engineering, Seoul National University of Science and Technology. Her research interests include micro/nano fabrication, MEMS, and sensors.
- Sang Hoon Lee
Professor in the Department of Automotive Engineering, Seoul National University of Science and Technology. His research interest is micro/nano fabrication, MEMS, and sensors.