ABSTRACT
This study introduces an automated robotic system designed to replace manual maintenance in cold rolling mills, where hazardous confined spaces present significant safety risks to workers. To enhance safety and efficiency, we modified a commercial aerial work platform into a teleoperated mobile robot. The system includes a redesigned end-effector equipped with high-pressure cleaning nozzles and a wide-angle camera for visual inspection. Experimental validation in both laboratory and field settings demonstrated the system's maneuverability and effectiveness. The results indicate that this robotic solution can successfully reduce safety hazards by minimizing manual intervention while ensuring high-quality cleaning and inspection in industrial rolling mills.
-
KEYWORDS: Mobile robot, Posture control of robotic system, Automated system
-
KEYWORDS: 모바일 로봇, 로봇 제어 시스템, 자동화 시스템
1. 서론
철강 산업의 핵심 공정인 압연(Rolling)은 스트립을 목표 두께로 정밀하게 가공하는 단계이다. 그러나 공정 특성상 발생하는 스케일 및 슬러지 등의 이물질이 압연 설비 내부에 축적되는 현상은 불가피하며, 이는 설비의 오작동과 제품 품질 저하를 야기하는 주요 원인이 된다. 이에 따라 현장에서는 주기적인 정비와 세척 작업을 통해 설비의 건전성을 유지하고 있다. 하지만 기존의 정비 방식은 작업자가 협소하고 폐쇄된 설비 내부로 직접 진입 해야 한다는 한계가 있다. 특히 바닥에 잔존하는 유분과 오염물은 작업자의 전도 및 추락 사고 위험을 가중하는 요인이다.
Fig. 1은 현재 수행되고 있는 수동 세척 작업을 보여주는데, 작업자가 오염 부위를 육안으로 식별하며 고압수를 분사하는 과정에서 불안정한 자세와 미끄러운 바닥 환경으로 인해 실족 사고의 발생 가능성이 매우 높음을 확인할 수 있다. 따라서 작업자의 안전을 확보하고 세척 효율을 높이기 위한 기술적 대안 마련이 시급한 실정이다[
1-
2].
이러한 문제를 해결하기 위해 고소 리프트를 활용한 모바일 플랫폼이나 특수 환경용 자동화 로봇에 관한 연구가 진행되어 왔다[
3-
10]. 그러나 제철소와 같이 비정형적이고 협소한 작업 환경에 최적화된 자동화 플랫폼에 대한 연구는 여전히 미흡한 실정이다. 특히 해당 공정은 작업자가 방호복을 착용한 상태에서 폭 0.9 m, 높이 4 m, 깊이 6 m의 협소한 공간에 진입해야 하므로, 시야 확보의 어려움과 공간적 제약으로 인해 효과적인 오염 제거가 어렵다. 기존의 협동 로봇 기반 고소 작업 로봇들 또한 넓은 작업 반경을 요구하기 때문에 이러한 협소 공간에 적용하기에는 한계가 있다[
6].
이에 본 연구에서는 좁고 높은 작업 공간의 특성을 고려하여, 상용 굴절 리프트를 기반으로 한 자율 이동 및 작업 시스템을 제안한다. 개발된 시스템은 작업자의 육안 검사 및 수동 세척 공정을 대체하기 위해 실시간 환경 인식이 가능한 말단 장치(End-effector)와 정밀 제어가 가능한 모바일 로봇으로 구성된다.
본 논문의 구성은 다음과 같다. 2장에서는 압연기 내부 진단 로봇의 전체 시스템 개요와 하드웨어 플랫폼, 제어 및 통신 아키텍처를 상세히 기술하고, 3장에서는 개발된 로봇의 성능 검증을 위한 실험 내용 및 결과를 제시한다.
2. 냉간 압연기 진단 및 세척 로봇
2.1 압연기 내부 진단 로봇 시스템 개요
압연기 내부 진단 및 작업 자동화를 달성하기 위한 구체적인 성능 지표를 수립하고 이를
Table 1에 정리하였다.
첫째, 협소한 작업 공간 내에서 구조물과의 충돌을 방지하고 주행 안전성을 확보하기 위해, 비 분사 조건에서의 로봇 위치 제어 오차를 ±50 mm 미만으로 제한하였다. 둘째, 오염 제거 성능은 실시간 비전 인식을 통해 탐지된 오염 물질의 80% 이상을 제거하는 것을 목표로 설정하였다. 마지막으로, 작업 공간 하부에서 제한된 시야로 상부를 관측하던 기존 방식과 달리, 본 시스템은 리프트를 활용해 상부에서 하부를 조망할 수 있다는 점을 고려하여 내부 환경 인식률의 목표치를 90% 이상으로 설정하였다.
2.2 시스템 구성
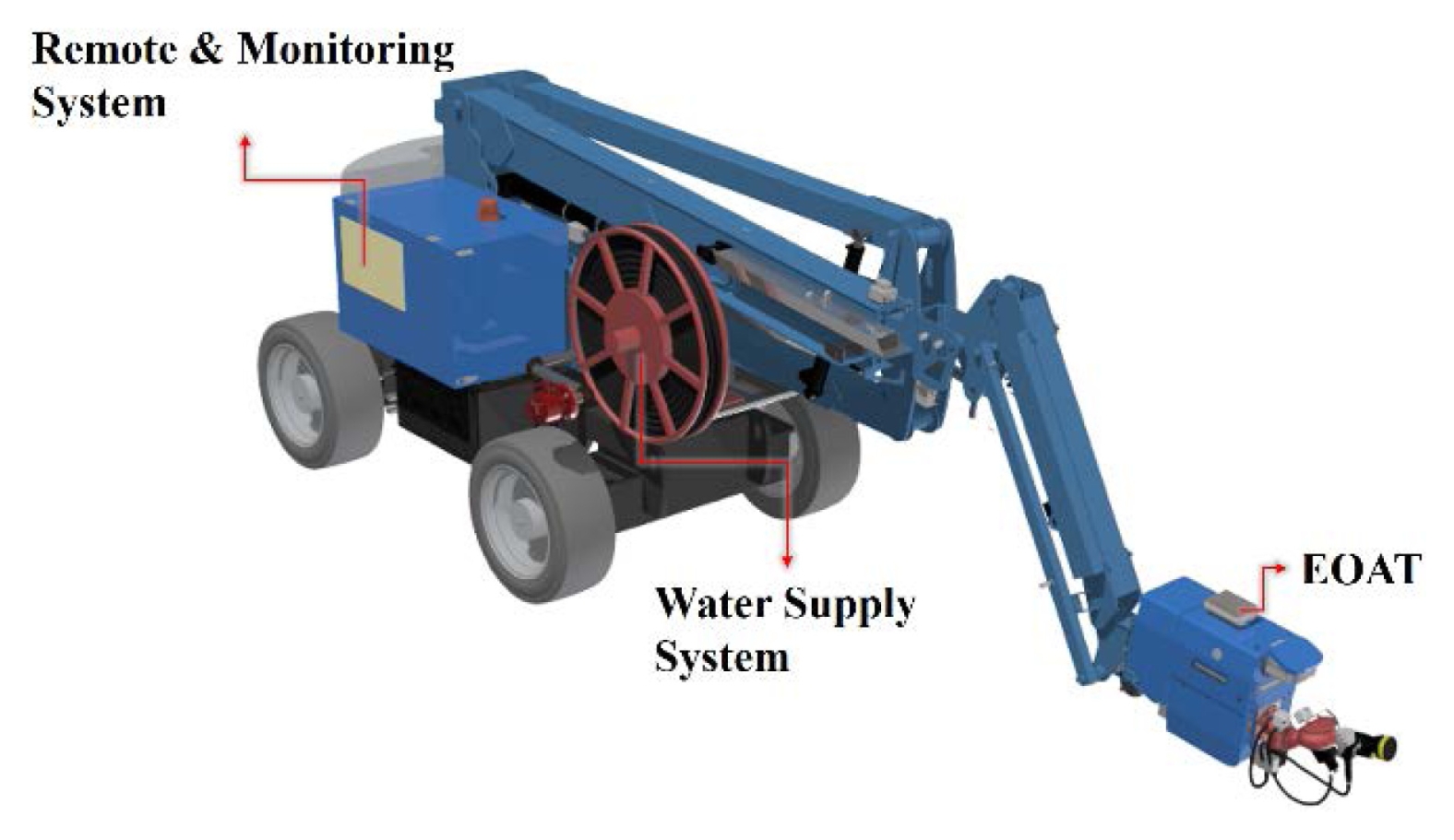
본 연구에서 개발한 고소 작업 로봇 시스템의 전체 구성은
Fig. 2와 같다. 시스템은 크게 목표 지점까지의 이동을 담당하는 주행부(Mobile Base), 말단 장치를 작업 위치까지 전개하는 리프트부(Lift Mechanism), 그리고 고압수 분사 및 내부 환경 정밀 진단을 수행하는 말단 임무 장치(EOAT)의 세 가지 모듈로 구성된다.
제철소 냉간 압연기의 협소한 작업 공간 내 운용성을 확보하기 위해, 기존 상용 고소 작업대의 작업자 탑승용 바스켓을 제거하고 소형화·경량화된 임무 장치를 장착하였다. 이를 통해 시스템 말단부의 폭을 기존 1,800에서 400 mm로 대폭 축소하여 내부 공간 접근성을 최적화하였다.
2.3 리프트 메커니즘 및 하드웨어 플랫폼
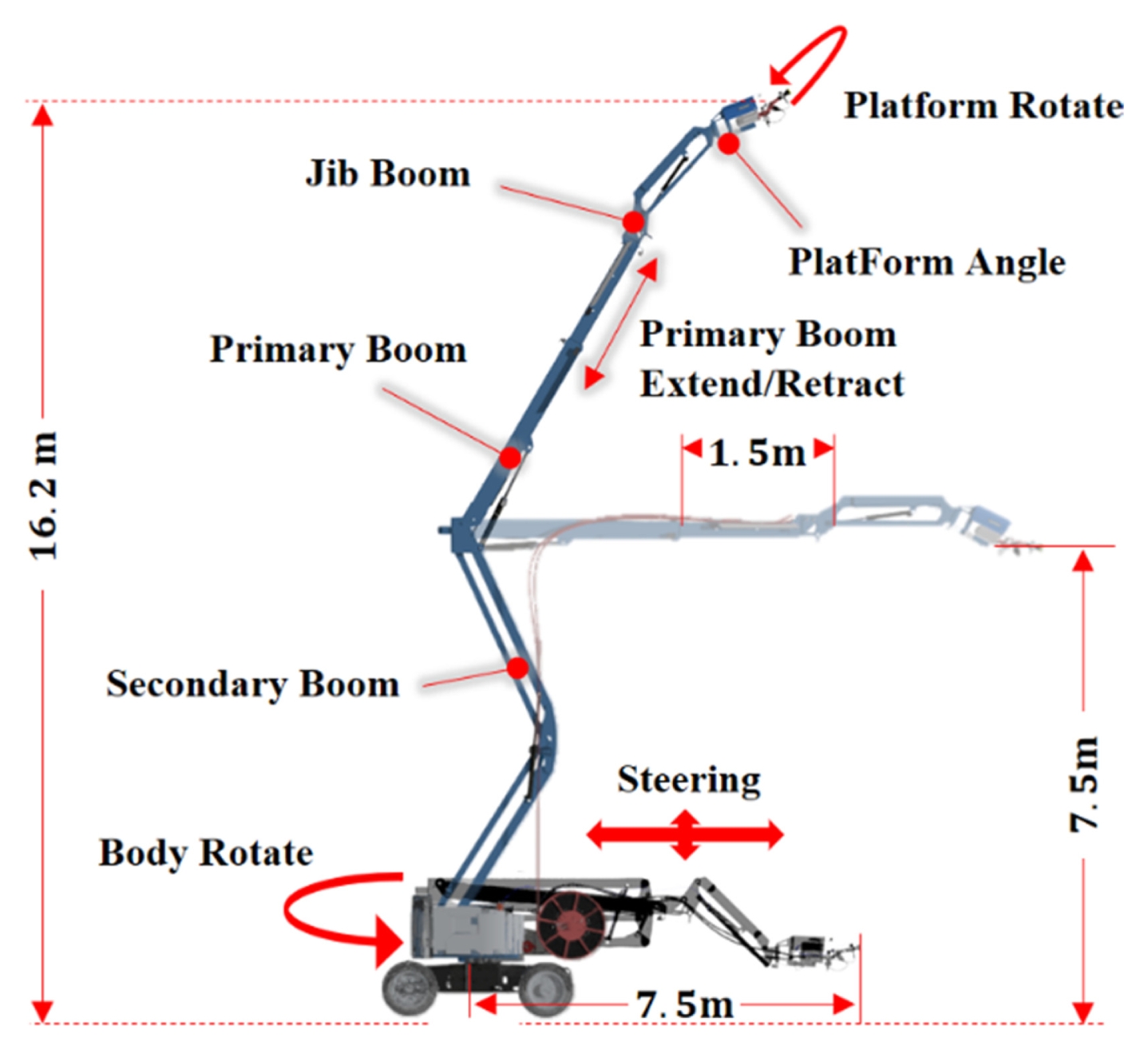
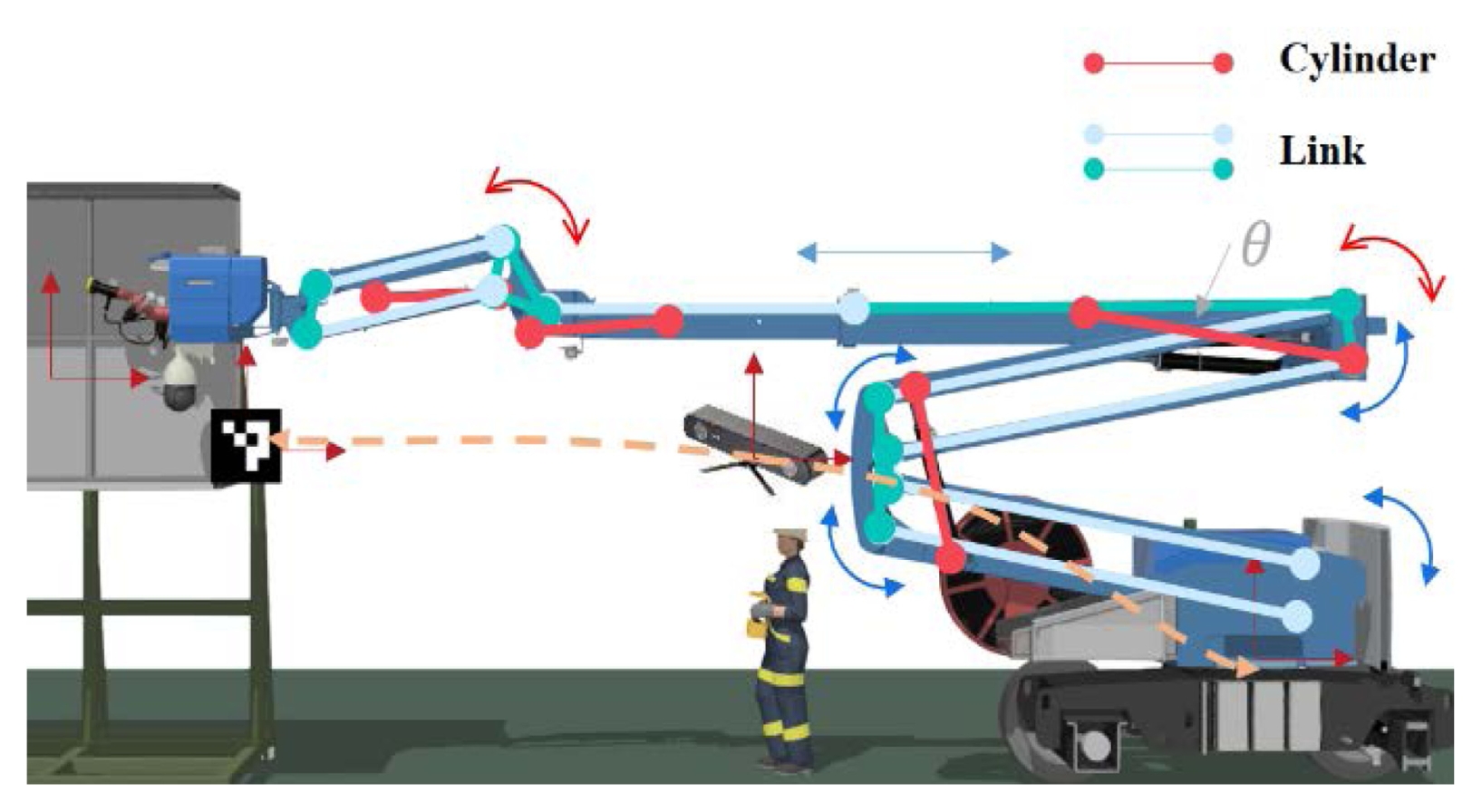
리프트 플랫폼으로는
Fig. 3과 같이 높은 자유도와 접근성을 고려하여 미국 Genie 사의 Z45-J/DC 굴절 리프트(Articulating Boom Lift)를 선정하였다. 해당 모델은 1차 붐(Primary Boom)과 더블 패러렐 구조의 2차 붐(Secondary Boom)으로 구성되어 있어 장애물 회피 능력이 우수하며, 1차 붐의 최대 1.5 m 수평 확장 기능을 통해 작업 지점까지 긴 직선 도달 거리를 제공한다. 또한, 넓은 조향각과 방위각 범위를 보유하고 있어 복잡한 내부 구조를 가진 압연기 환경에서의 방향 전환 및 임무 수행에 적합하다.
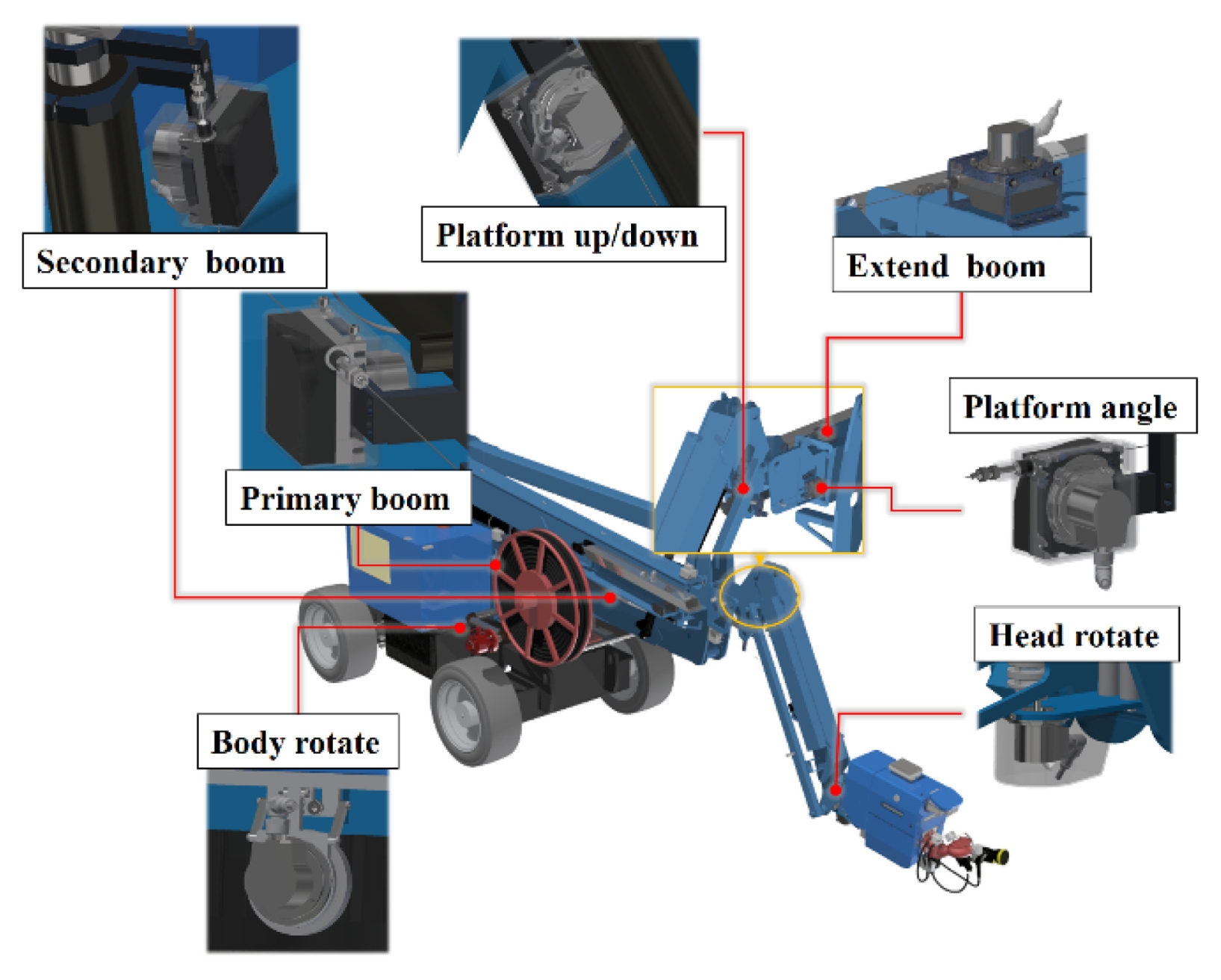
기존 리프트의 링크 전개, 주행 및 조향을 위한 구동 설비는 유지하되, 협소 공간에서의 자율 주행 및 정밀 제어를 위한 추가 제어 시스템을 구축하였다. 압연기 내부 공간은 폭 0.60.9 m의 협소한 구조로 이루어져 있어 작업 시 구조물과의 충돌 방지가 필수적이다. 이에 7자유도를 갖는 리프트의 각 유압 실린더에 와이어 드로우 엔코더(Wire-draw Encoder)를 설치하여 길이 변화를 실시간으로 측정함으로써 정밀한 기구학적 제어가 가능하도록 설계하였으며
Fig. 4에 나타내었다.
EOAT는
Fig. 5와 같이 협소한 작업 공간을 고려하여 허용 폭 400 mm 이내, 폭 312 mm, 두께 387 mm의 크기로 설계되었으며, 매니폴드 블록에 방수포, 제어 시스템, 센서 모듈이 통합된 구조를 갖는다. 방수포(Water Cannon)에는 엔코더가 부착되어 있어 작업자는 피드백된 각도 정보를 바탕으로 원격 정밀 제어를 수행할 수 있다. 시각 정보 수집 시스템은 고압 세척 및 정비 작업 중 비산되는 오염 물질로부터 메인 카메라를 보호하기 위해 실린더 구동 기반의 수납형(Retractable) 구조를 채택하였다. 이를 통해 카메라의 오염 노출 시간을 최소화함과 동시에 필요시 전개하여 넓은 영역의 시각 정보를 확보할 수 있다.
메인 카메라가 수납된 상태에서도 내부 작업 공간의 실시간 상황 인식이 가능하도록 보조 모니터링 시스템을 구축하였다. 보조 카메라는 틸트 -16°에서90°, 팬 360° 구동이 가능한 PTZ 모델을 적용하였으며, 와이퍼가 내장되어 있어 수분과 오염물질을 효과적으로 제거하고 안정적인 시야를 제공한다. 더불어 전면, 측면, 상부에 배치된 거리 센서와 고광량 LED를 통해 충돌 방지 및 효과적인 육안 진단을 지원하여, 작업 공간 외부에서도 내부 상황을 안전하게 모니터링할 수 있도록 하였다.
추가적으로 고압 살수 작업 시 발생하는 반동에 의한 말단부의 동적 거동을 분석하기 위해 FARO Vantage Laser Tracker를 사용하여 리프트의 Yaw 방향 흔들림을 측정하였다. 측정 결과, 리프트는 평균 ±0.5°의 흔들림 오차를 보였으며, 이는 리프트 최대 전개 시 약 ±53 mm의 변위에 해당한다. 따라서 임무 장치의 기본 폭 312 mm에 흔들림 오차를 반영한 최대 소요 폭(Operating Envelope)은 418 mm로 산출되었다. 이는 0.9 m 내외의 압연기 내부 공간 마진 대비 충분한 여유를 가지므로, 진동이 발생하는 상황에서도 구조물과의 충돌 없이 안전한 임무 수행이 가능할 것으로 예측된다.
2.6 제어 시스템 아키텍처 및 인터페이스
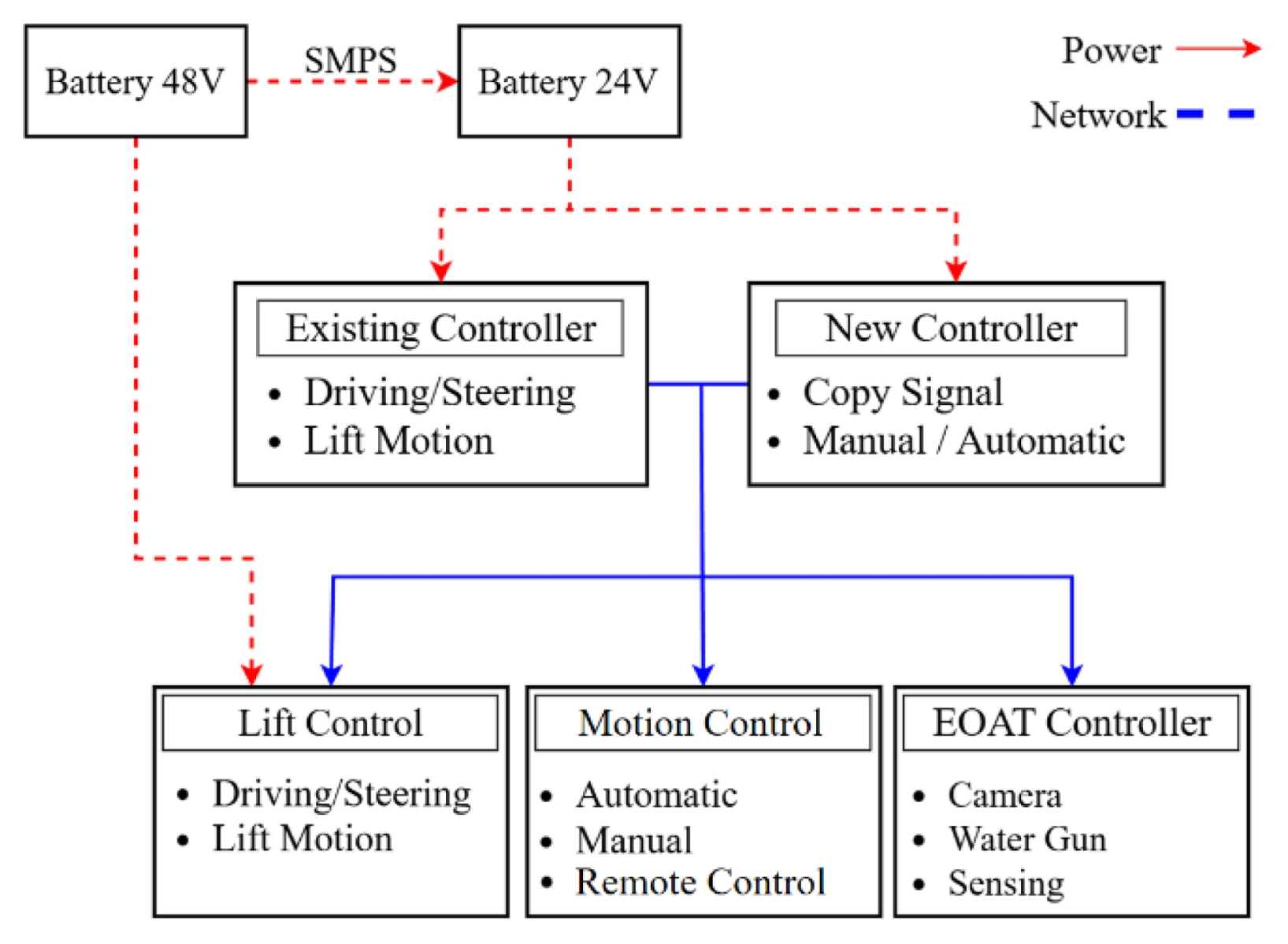
선정된 굴절 리프트 플랫폼은 유압 펌프 구동, 주행 및 조향을 위해 DC 48V를 사용하고, 제어 로직 및 조작 스위치 회로에는 DC 24V를 사용하는 이중 전원 구조(Dual Voltage Architecture)를 갖추고 있다. 본 연구에서는 기존 플랫폼의 전장 시스템과의 호환성을 확보하고 자동 제어 기능을 구현하기 위해, 로직 전원과 동일한 DC 24V 기반의 통합 제어기를 설계하였다.
기존 상용 리프트의 구동 설비를 유지하면서 모바일 로봇 및 말단 임무 장치(EOAT)를 정밀하게 제어하기 위하여 새로운 제어 인터페이스를 구축하였다. 제안된 인터페이스는
Fig. 6과 같이 기존의 기계식 접점(Mechanical Contact) 시스템을 유지한 상태에서 자동 제어 시스템을 병렬로 연결하는 구조를 가진다.
이러한 병렬 운용 방식은 수동 조작 스위치의 신호를 복제하여 기존 시스템과의 신호 레벨 호환성을 유지함으로써 통합 운용성을 강화하였다. 또한, 기존 제어 하드웨어를 최대한 활용함으로써 개발 비용과 시간을 절감할 뿐만 아니라, 자율 주행 및 목표 추종 중 예기치 않은 오류가 발생하더라도 수동 조작을 통한 즉각적인 대처가 가능하여 시스템 전반의 안전성을 확보하였다.
압연기 내부와 같은 협소한 작업 공간에서는 제어 루프의 시간 지연이나 지터(Jitter)가 발생할 경우, 로봇의 불안정한 거동을 유발하여 구조물과의 충돌로 이어질 위험이 크다. 이러한 문제를 방지하고 실시간 제어의 결정성(Determinism)과 연산의 유연성을 동시에 확보하기 위해 계층적 제어 구조를 채택하였다.
특히 정밀한 조작이 요구되는 EOAT에는 독립적인 하위 제어기(Low-level Controller)를 할당하여 동작 제어를 분산 처리하도록 설계하였다. 이를 통해 상위 제어기(High-level Controller)의 연산 부하 변동과 관계없이 임무 장치의 제어 주기를 일정하게 유지하여, 실시간 제어 성능의 안정성을 보장하였다.
3. 시뮬레이션 및 위치 추정
3.1 기구학적 시뮬레이션 및 작업 위치 선정
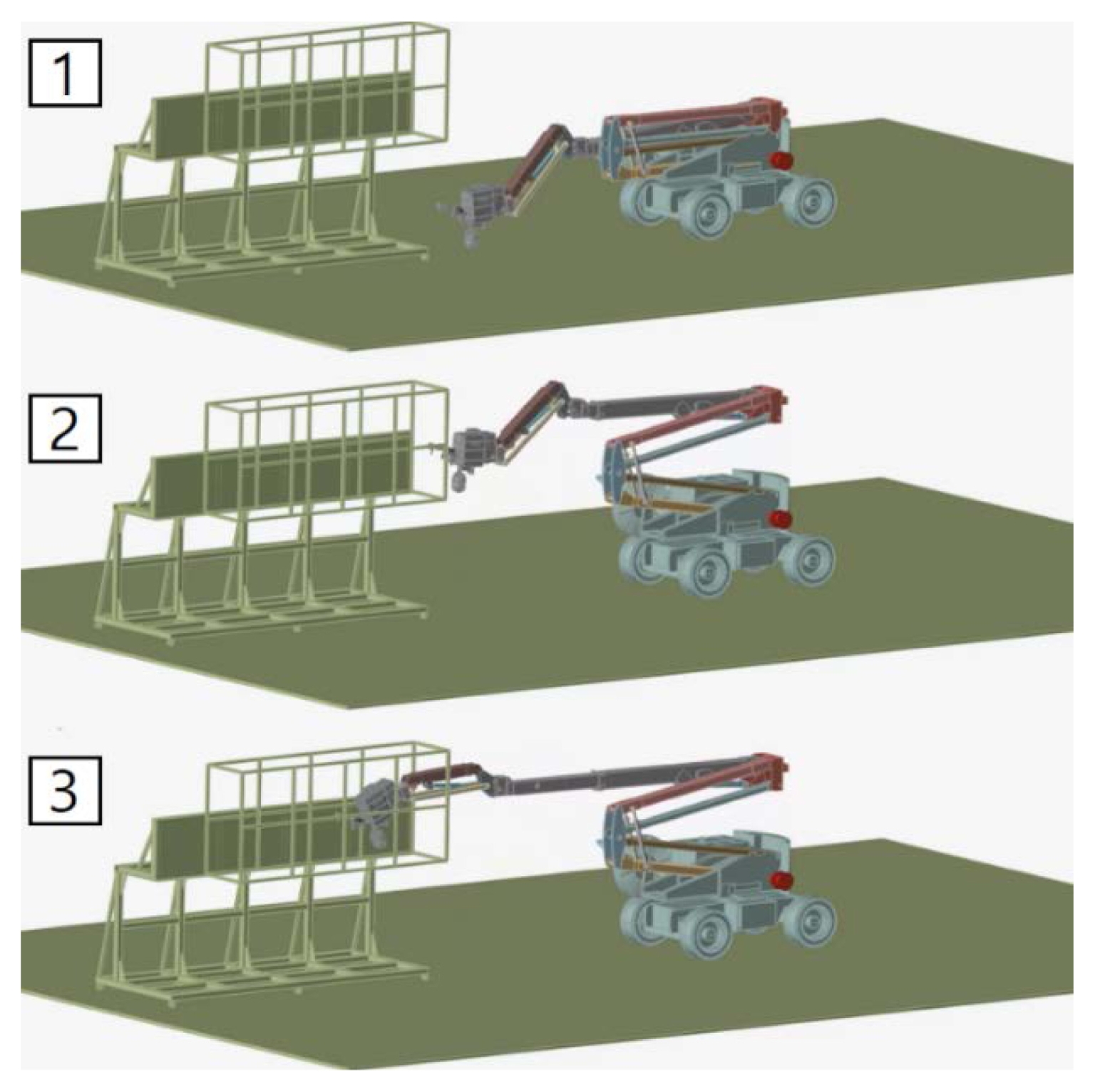
압연기 진단 로봇은 협소한 내부 설비 사이를 통과하여 목표 지점에 정확히 도달해야 하므로, 투입 전 정밀한 경로 계획과 충돌 위험 분석이 필수적이다. 이를 위해 굴절 리프트의 기구학적 모델을 구축하고 Altair사의 Inspire 소프트웨어를 활용하여
Fig. 7과 같이 동작 경로 시뮬레이션을 수행하였다.
시뮬레이션을 통해 작업 공간 및 테스트 베드의 구조적 제약 사항을 반영하여 로봇의 링크 전개 시 예상되는 충돌 지점과 구조물 간의 최소 안전 거리를 분석하였다. 분석 결과, 작업 효율성과 안전성을 동시에 확보할 수 있는 최적의 모바일 베이스 배치 위치는 작업 공간 입구로부터 전방 약 3 m 지점임을 확인하였으며, 이를 현장 운용의 기준 위치로 설정하여 실험의 불확실성을 최소화하였다.
3.2 마커 기반 로봇 위치 인식 및 좌표 변환
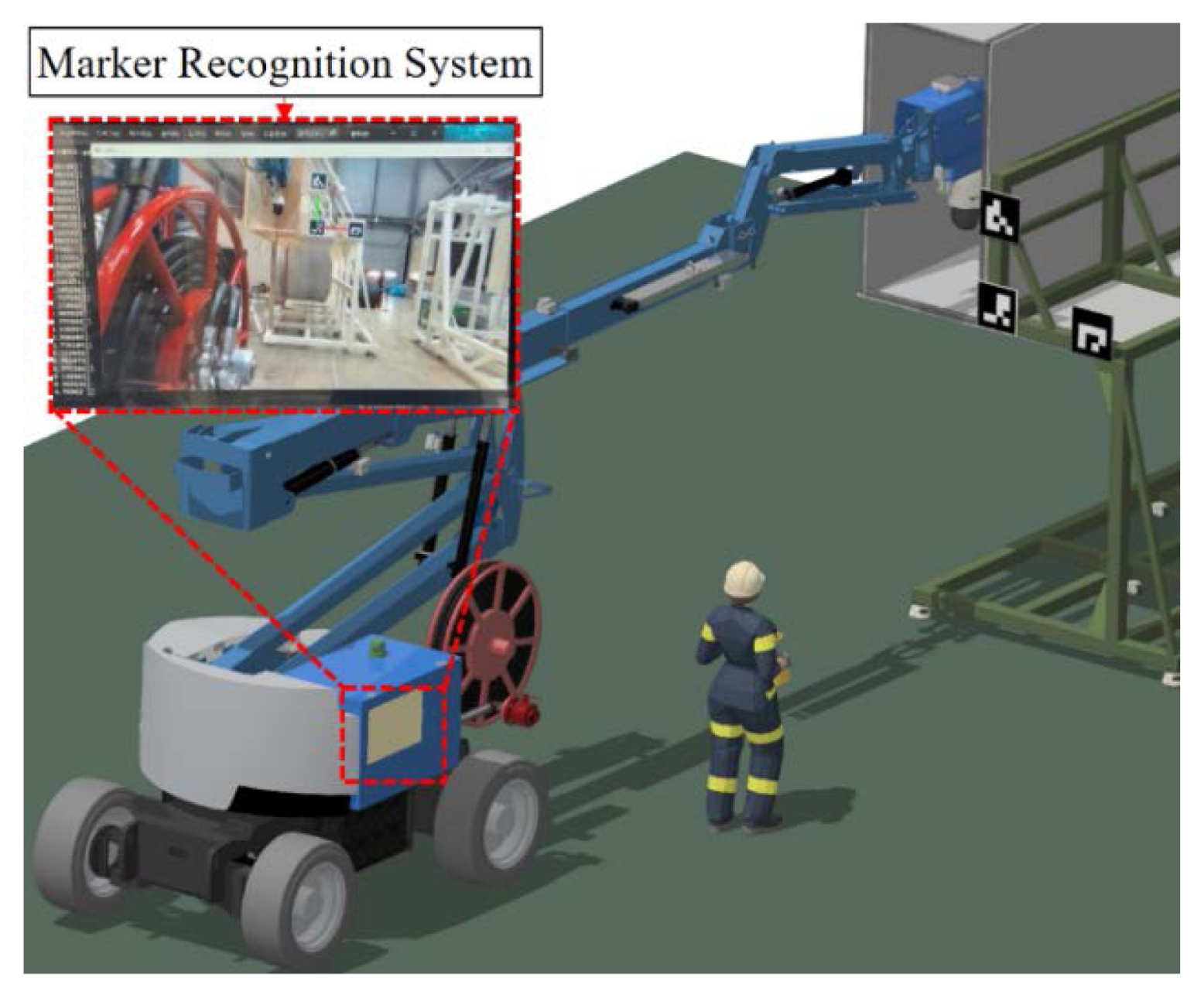
설정된 기준 위치3 m에 로봇이 정확히 정차했는지 판단하고, 로봇 좌표계 기준의 목표점(Target)을 산출하기 위해 비전 마커 기반의 위치 인식 시스템을 개발하였다. 본 시스템은 OpenCV 라이브러리의 ArUco Marker를 활용하며, 인식 과정은
Fig. 8과 같다.
로봇에 탑재된 카메라는 작업 공간에 부착된 마커의 코너 및 외곽 특징점을 추출하여 이미지 상의 2D 좌표를 검출한다. 이후 PnP(Perspective-n-Point) 알고리즘을 적용하여 카메라 좌표계({C})에 대한 마커 좌표계({M})의 6자유도 상대 위치를 계산한다. 로봇 베이스({B})에서 목표 지점({T})까지의 최종 변환 행렬은 모바일 로봇과 카메라 간의 고정 변환 행렬, 카메라와 마커 간의 변환 행렬 그리고 마커와 목표 지점 간의 관계를 이용하여
식(1)과 같이 도출된다.
여기서 작업자가 원격 컨트롤러 GUI를 통해 2D 목표를 지정하면, 통합 제어기는 위 수식을 통해 3D 좌표로 변환된 목표 위치를 생성한다. 이후 역기구학(Inverse Kinematics) 해석을 통해 리프트 각 조인트의 목표 각도와 실린더 변위를 산출하여 임무 장치를 제어한다. 작업자는
Fig. 9와 같이 모바일 로봇에 장착된 모니터를 통해 마커 인식 현황과 로봇의 위치 상태를 실시간으로 확인할 수 있다.
4. 성능 평가 및 현장 실증
4.1 동작 제어 정밀도 검증
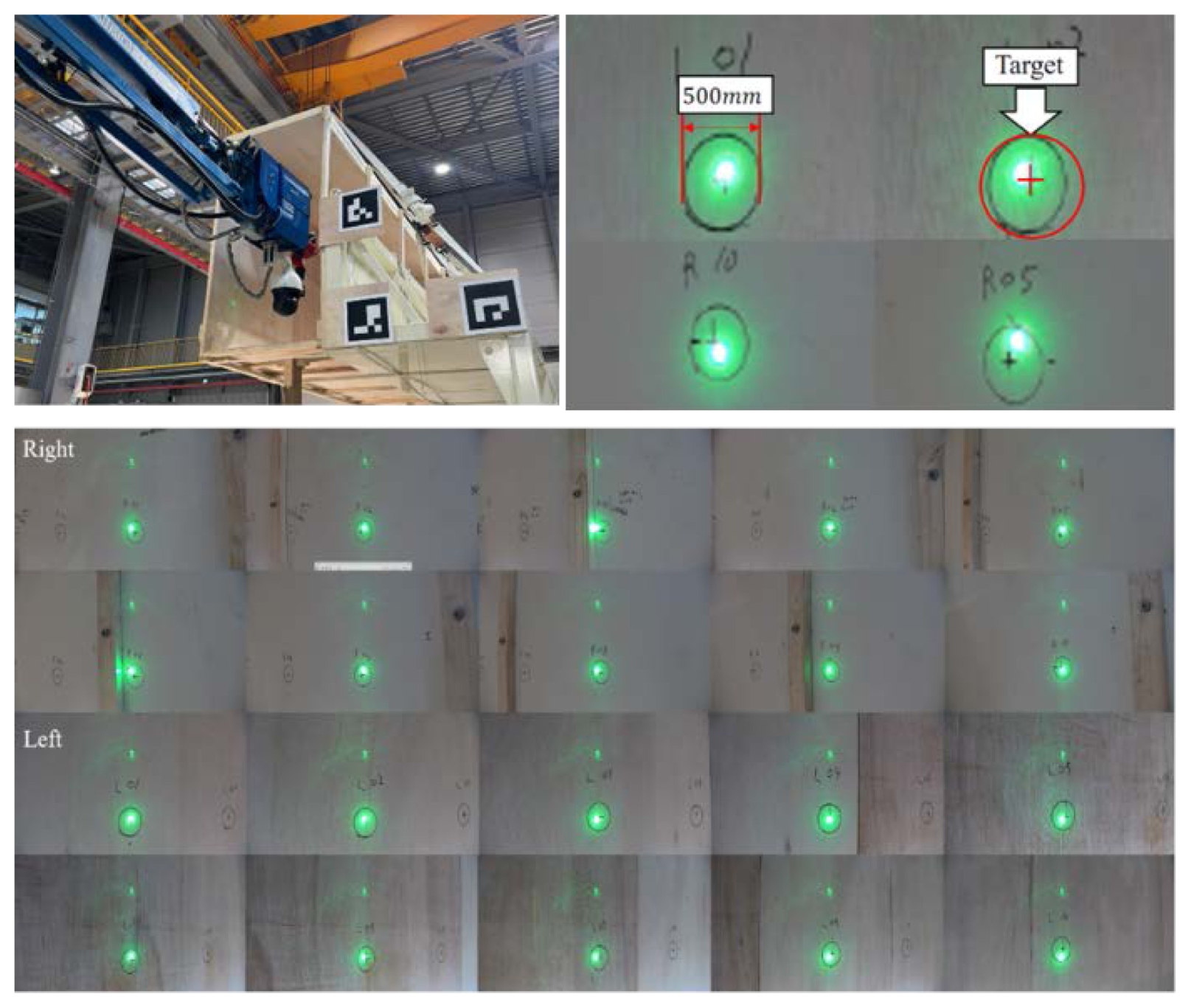
개발된 제어 시스템의 위치 결정 성능을 검증하기 위해
Fig. 10과 같이 정밀도 측정 실험을 수행하였다. 테스트 베드 내부에 직경 500 mm의 원형 영역을 설정하고, 290 mm 간격으로 총 20개의 목표 지점(Target Points)을 배치하였다. 실험은
Fig. 11과 같이 리프트를 단계적으로 확장하며 임무 장치 하단에 부착된 P T Z 카메라의 레이저 포인터가 각 목표점의 중심을 정확히 지향하는지 확인하는 방식으로 진행되었다. 이때, PTZ 카메라는 측면 90°로 고정하여 추가적인 보정 제어 없이 리프트 자체의 기구학적 정밀도만을 평가하였다.
Table 2는 측정된 20개 지점에 대한 위치 오차 데이터를 보여준다. 실험 결과, 전체 20개 경로점에 대한 절대 오차 평균은 약 17.98 mm로 측정되었다. 최대 오차는 17번 경로점에서 48.4 mm (절대값 기준 48.8 mm), 최소 오차는 13번 경로점에서 0.6 mm로 나타났다. 이는 본 연구의 허용 오차 범위인 ±50 mm 이내를 만족하는 수치로, 개발된 굴절 리프트 제어 시스템이 협소 공간 내에서 임무 장치를 목표 위치까지 정밀하게 이동시킬 수 있음을 입증한다.
4.2 오염 제거 및 모니터링 성능 평가
임무 장치의 세정 및 진단 성능을 정량적으로 평가하기 위해 압연기 내부 환경을 모사한 오염물 제거 실험을
Fig. 12와 같이 수행하였다. 모래와 그리스를 혼합한 인공 오염물을 테스트 베드 내 1 m × 1 m 영역에 균일하게 도포한 후, 작업자가 원격으로 카메라 영상만을 의존하여 고압 세척을 수행하였다.
실험 결과, 육안 점검 후 수작업으로 제거하던 기존 방식 대비, 원격 제어를 통해 오염물을 실시간으로 식별하고 즉각적으로 제거함으로써 작업 효율성이 향상됨을 확인하였다. 모니터링 범위 분석 결과, 테스트 베드 전체 면적 6.632 m
2 중 임무 장치의 동작 범위(높이 2 m, 깊이 4 m) 내에서 약 6.3 m
2를 커버할 수 있는 것으로 나타났다. 약 4%의 사각지대가 존재하였으나, 이는 임무 장치 하단부의 PTZ 카메라를 활용하여 보완함으로써 내부 인식률 90% 이상의 목표 성능(
Table 1 참조)을 달성하였다.
또한,
Fig. 13과 같이 1차 및 2차 붐을 최대로 전개하여 임무 장치의 높이가 변화하는 조건에서도 고압수 분사 실험을 수행하였다. 급수 호스의 장력 변화에도 불구하고 안정적인 분사가 유지됨을 확인하여, 유압 및 급수 시스템의 안정성을 검증하였다.
실험실 환경에서의 검증을 완료하고, POSCO 냉간 압연공장에서 현장 실증 실험을 수행하였다. 실제 현장은 복잡한 설비 구조로 인해 압연기 전방에서의 직접 접근이 제한되었으나, 굴절 리프트의 긴 도달 거리와 관절 구조를 활용하여 이를 극복하고 진입에 성공하였다.
Fig. 14는 현장 실증 결과를 나타내었으며 실증을 통해 개발된 로봇 시스템이 기존의 고위험 인력 기반 정비 작업을 대체할 수 있는 충분한 가능성을 확인하였다.
5. 결론
본 논문에서는 기존 인력에 의존하던 냉간 압연기 정비 작업을 대체하기 위한 자동화 로봇 시스템을 제안하고, 이에 대한 성능 검증 결과를 제시하였다. 개발된 로봇은 협소한 설비 내부에서 임무 장치를 목표 위치까지 정밀하게 전개할 수 있도록 제어 시스템을 구축하였으며, 실험 결과 평균 오차 17.98 mm 수준의 위치 결정 정밀도를 확보하였다. 또한, 광범위한 시야각을 갖춘 카메라 시스템을 도입하여 사각지대를 최소화하였으며, 이를 통해 실시간으로 내부 상태를 진단하고 오염물을 효과적으로 제거할 수 있음을 검증하였다. 본 연구는 압연기 내부 정비 작업의 자동화 가능성을 실증하였으며, 향후에는 고소작업 플랫폼을 적용한 특화 로봇을 추가 개발하여, 경량화 및 자율 작업 기술 고도화를 통해 전체 공정에 대한 완전한 무인 솔루션을 제공함으로써 작업자의 안전 확보 및 산업 재해 예방에 기여하고자 한다.
FOOTNOTES
-
ACKNOWLEDGEMENT
본 연구는 포스코홀딩스 연구 지원으로 수행되었으며 이에 감사드립니다.
Fig. 1Rolling machine maintenance and visible pollutants

Fig. 2Altitude lift robot configuration overview
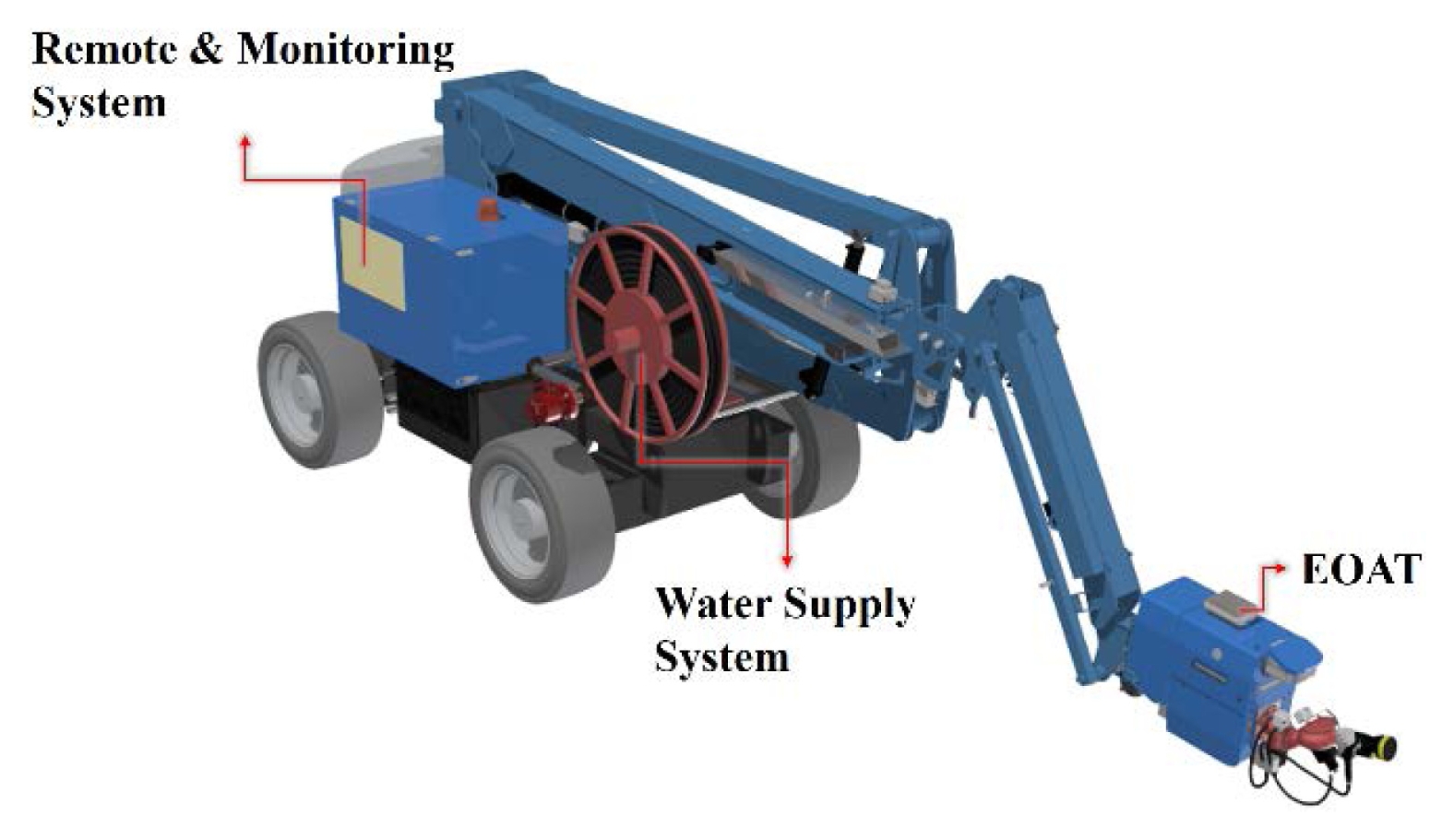
Fig. 3Configuration of articulated lift linkage
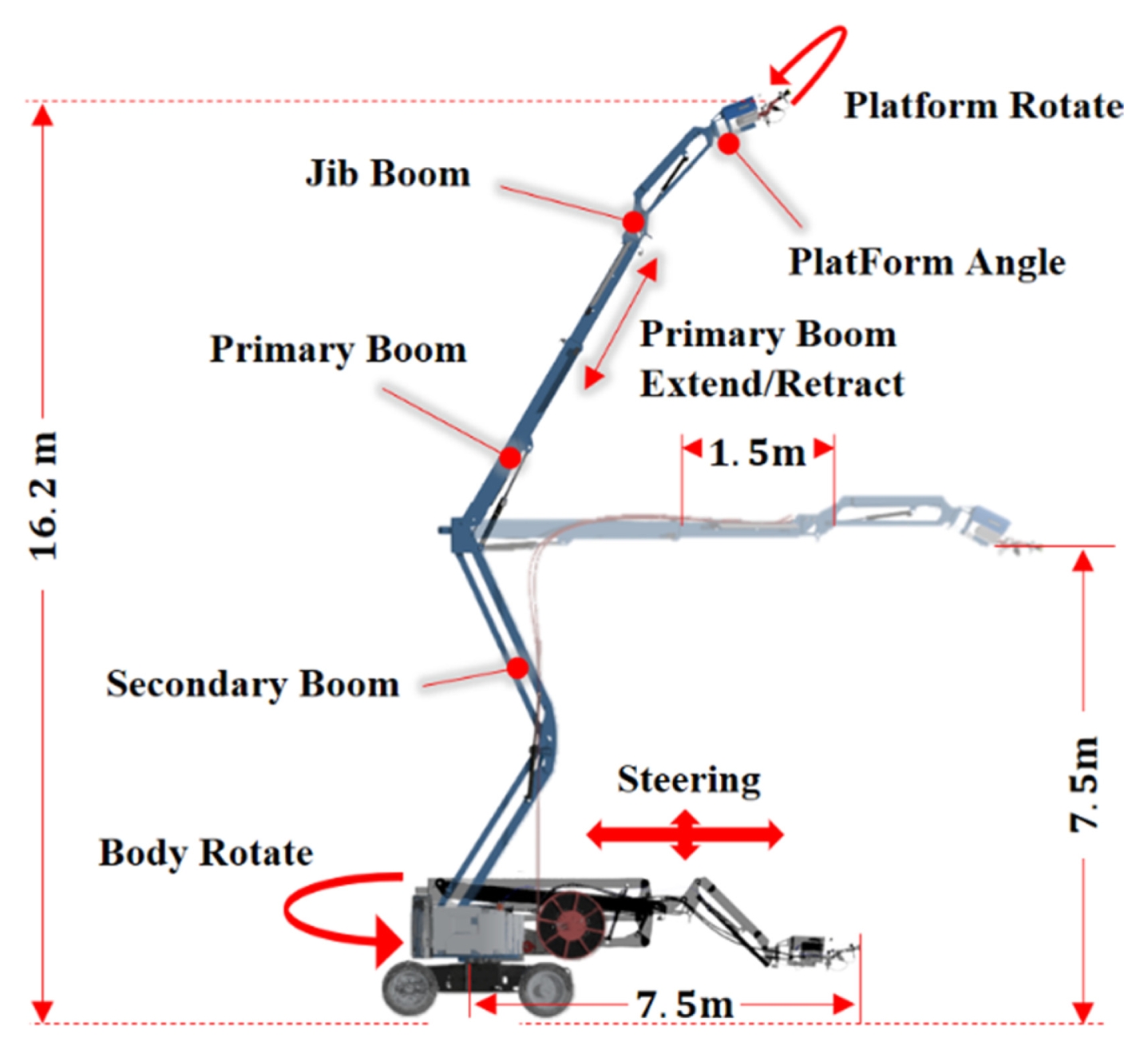
Fig. 4Detailed design and placement of encoders for joint position control in altitude lift robot
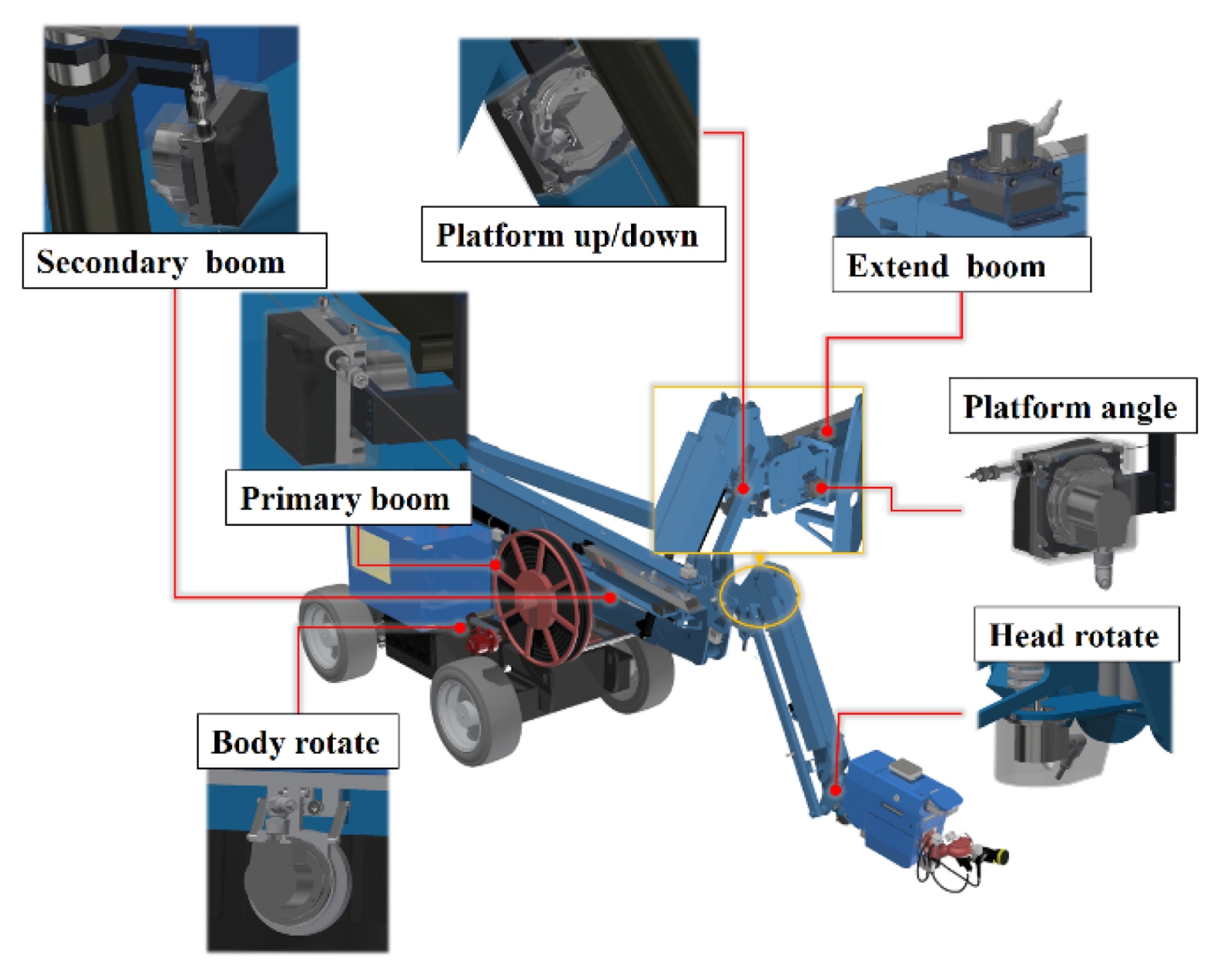
Fig. 5Detail design and configuration of the EOAT

Fig. 6Block diagram of the power and control system architecture
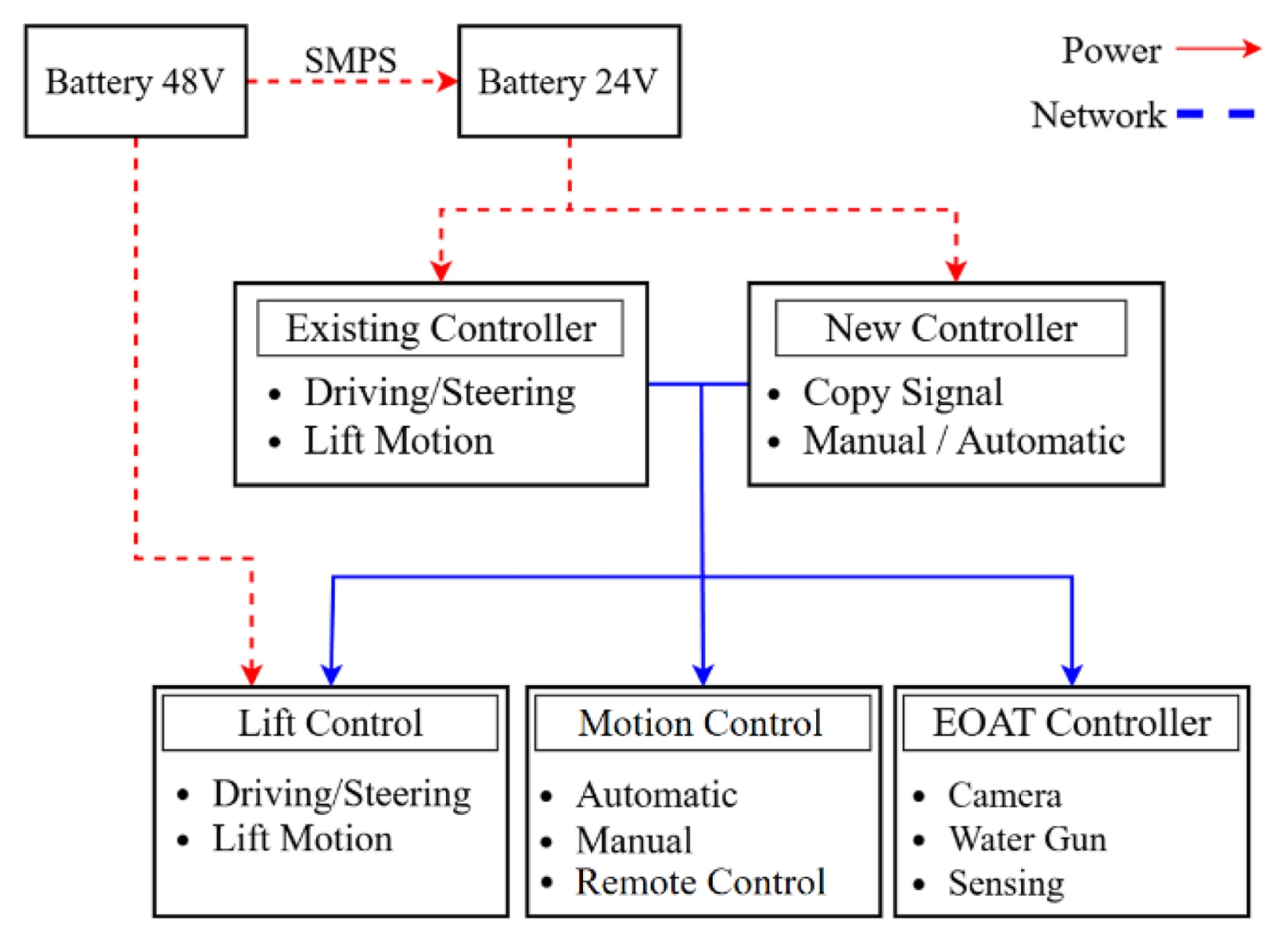
Fig. 7Motion path simulation and workspace analysis of the proposed robot
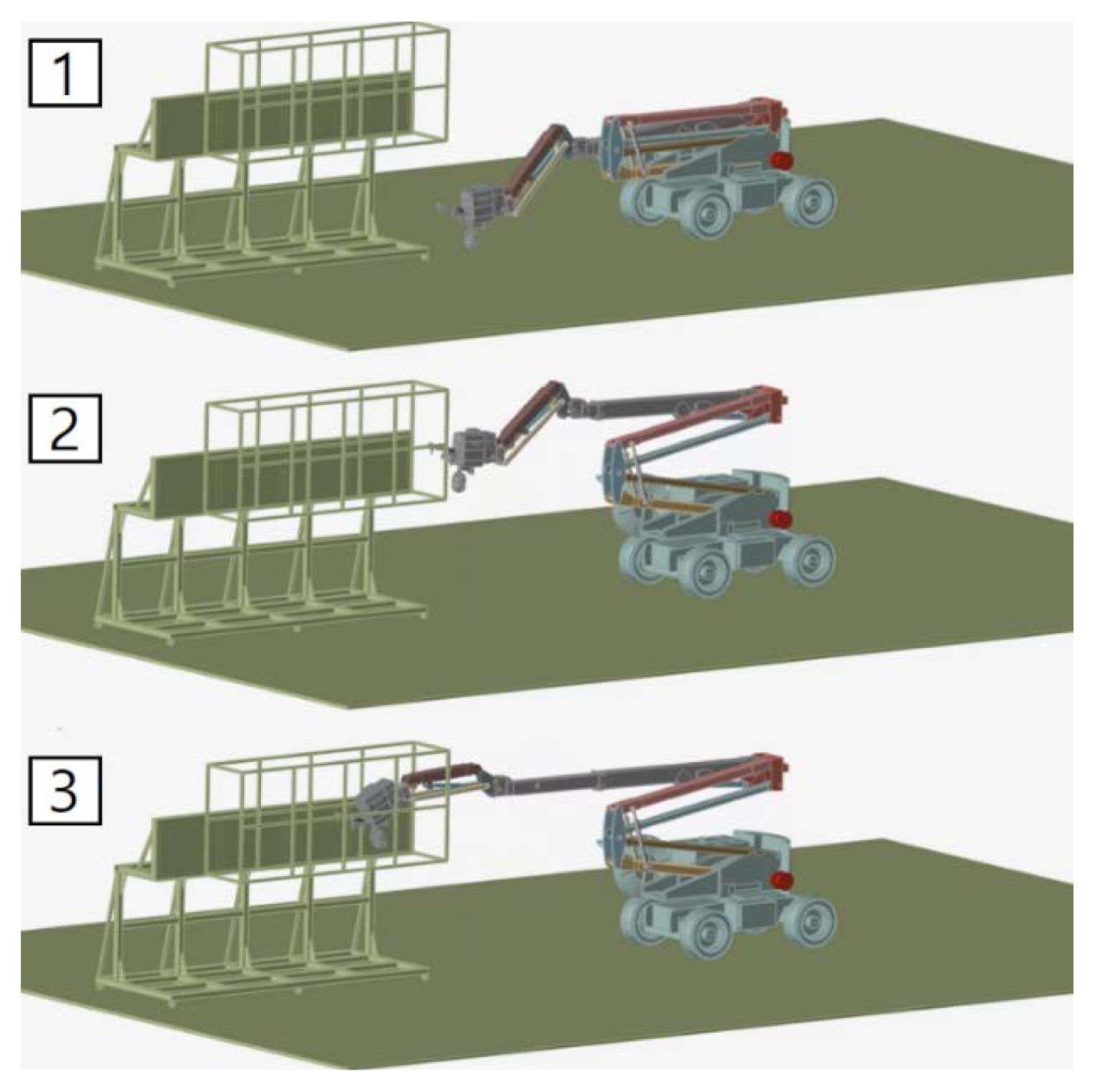
Fig. 8Schematic diagram of the position estimation algorithm using ArUco markers
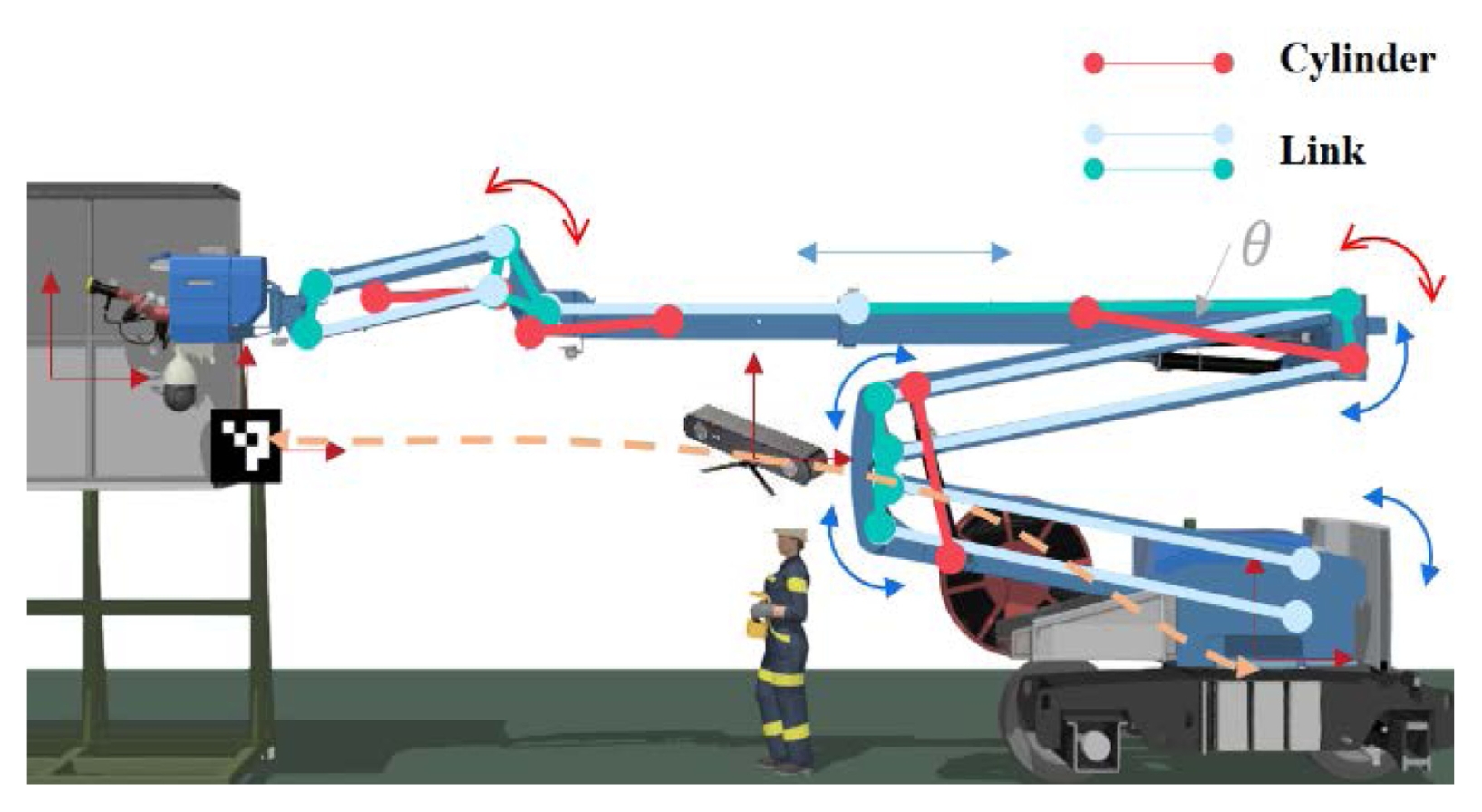
Fig. 9Real-time monitoring interface for the marker recognition
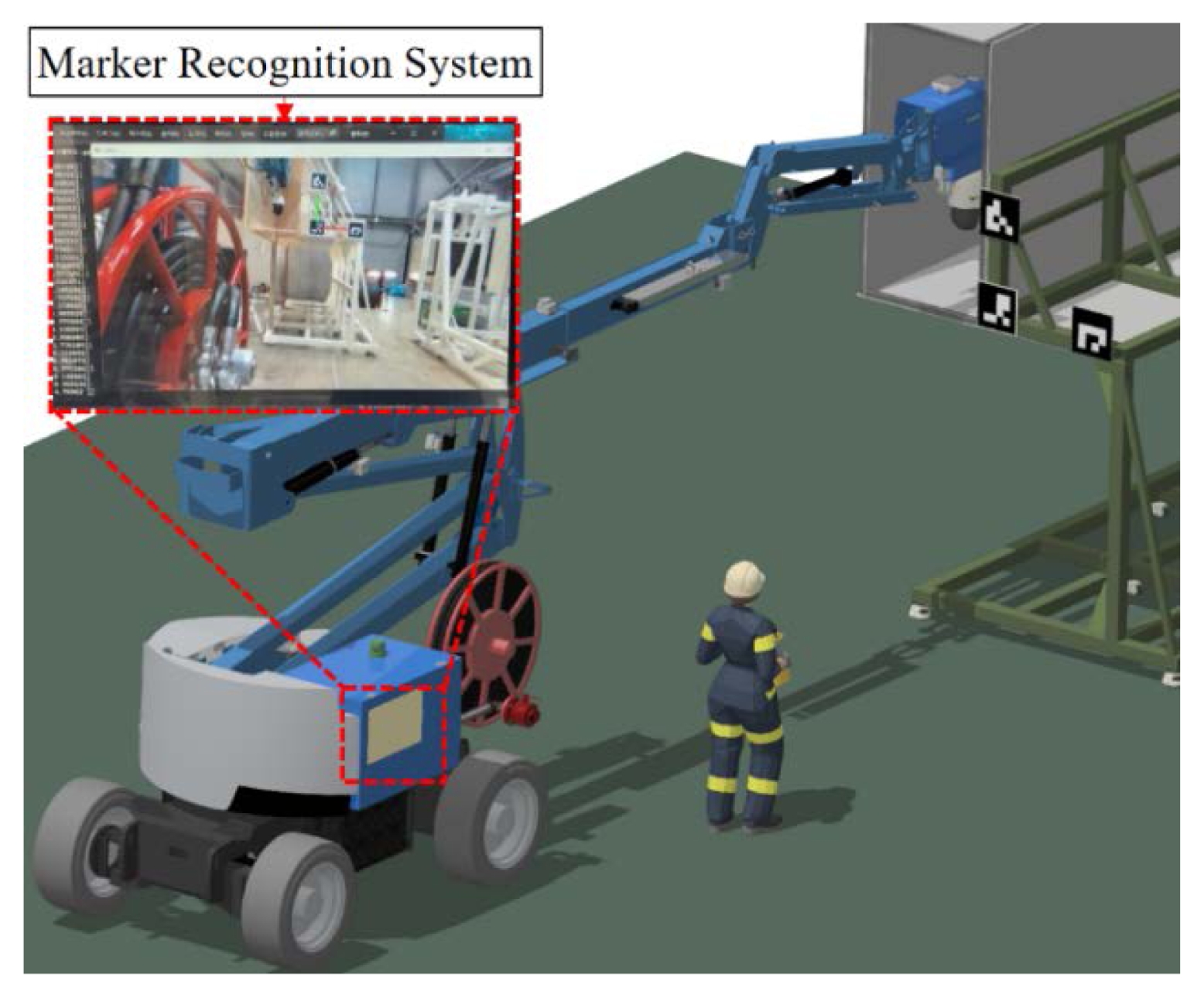
Fig. 10Experimental setup for target tracking and positioning accuracy

Fig. 11Onboard camera view of the laser pointer targeting
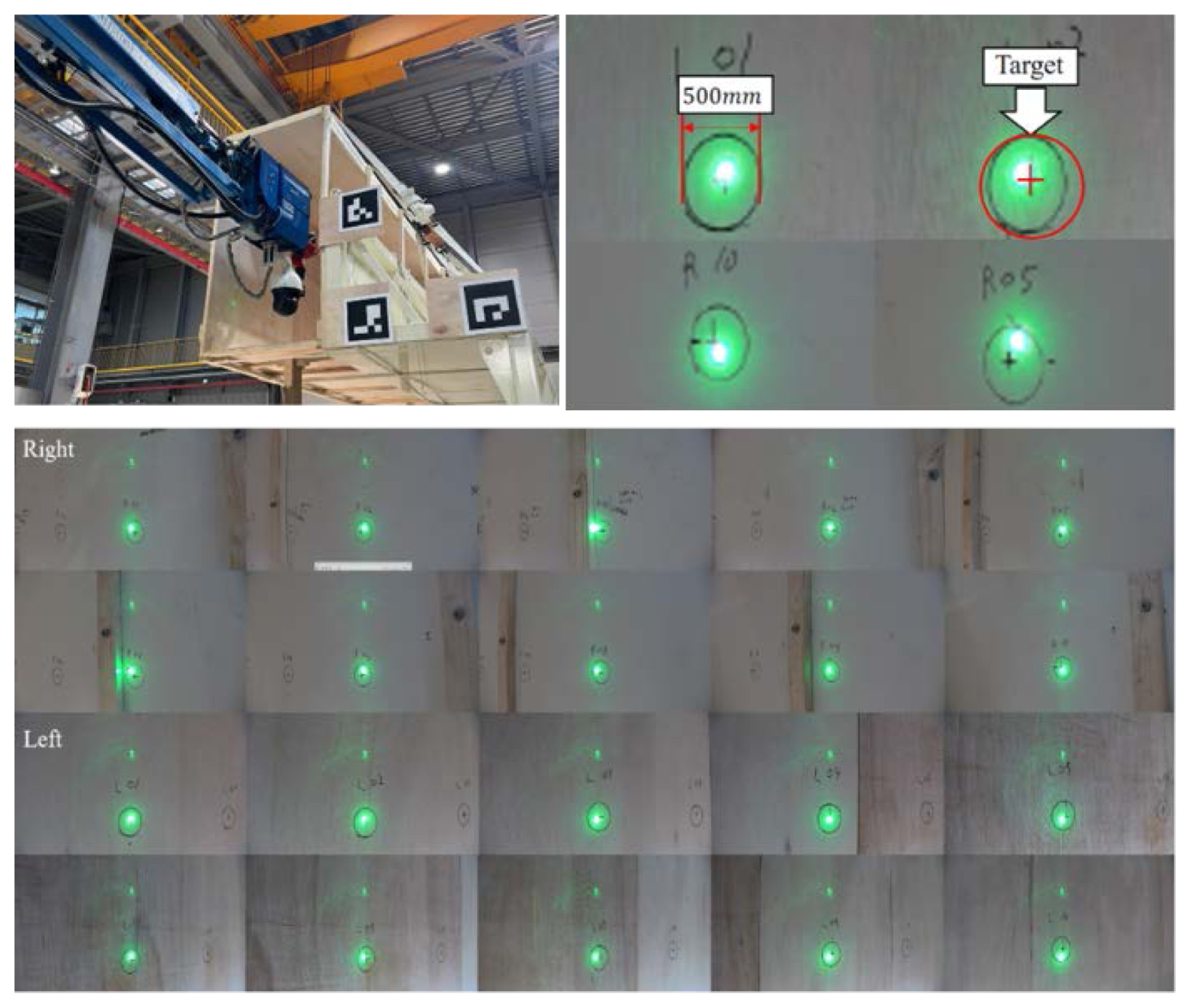
Fig. 12Cleaning performance test in a simulated environment

Fig. 13Water spray test verifying fluid supply stability during lift extension

Fig. 14On-site demonstration of the robot system at a rolling mill

Table 1Table of measured accuracy data
Table 1
|
Precision |
< ±50 mm |
|
Removal rate |
≥ 80% |
|
Visualization rate |
≥ 90% |
Table 2Comparison of measured accuracy data
Table 2
|
Motion precision experimental results |
Deviation [mm] |
|
1 |
12.3 |
11 |
9.9 |
|
2 |
−7.5 |
12 |
−22.3 |
|
3 |
24.8 |
13 |
0.6 |
|
4 |
−13.2 |
14 |
39.5 |
|
5 |
3.1 |
15 |
−11.1 |
|
6 |
−28.4 |
16 |
26.4 |
|
7 |
47.9 |
17 |
−48.8 |
|
8 |
−35.6 |
18 |
7.7 |
|
9 |
18.2 |
19 |
−19 |
|
10 |
−4.7 |
20 |
2.5 |
REFERENCES
- 1. Lee, D., Cho, G., (2023), A study on the actual status of steel risk assessment operation and improvement measures for hazard risk, Journal of the Korean Academia-Industrial Cooperation Society, 24(9), 487-496.
- 2. Kim H.-R., Lee J-W, Lee H-E, Jeon J.-H., Choi M., Kim G.-G., Na G.-W.. 2025;Research on the current status of safety systems in the steel industry and alternative solutions. Korean Institute of Labor Safety and Health. https://kilsh.or.kr/en/research-on-the-current-status-of-safety-systems-in-the-steel-industry-and-alternative-solutions-2025/.
- 3. Keating, S. J., Leland, J. C., Cai, L., Oxman, N., (2017), Toward site-specific and self-sufficient robotic fabrication on architectural scales, Science Robotics, 2(5), eaam8986.
- 4. Melenbrink, N., Werfel, J., Menges, A., (2020), On-site autonomous construction robots: Towards unsupervised building, Automation in Construction, 119, 103312.
- 5. Zhou, Y., Duan, M., (2024), Vibration compensation of an extendable variable-stiffness boom-lift-mounted robot, IEEE/ASME Transactions on Mechatronics, 29(4), 2812-2820.
- 6. Wu, H., Gong, C., Fan, L., Liu, G., Zheng, Y., Shen, T., Suo, X., (2025), A novel ground-to-elevated mobile manipulator base system for high-altitude operations, Machines, 13(4), 288.
- 7. Usamentiaga, R., Lema, D. G., Pedrayes, O. D., Garcia, D. F., (2022), Automated surface defect detection in metals: A comparative review of object detection and semantic segmentation using deep learning, IEEE Transactions on Industry Applications, 58(3), 4203-4213.
- 8. Cha, Y. J., Choi, W., Büyüköztürk, O., (2017), Deep learning-based crack damage detection using convolutional neural networks, Computer-Aided Civil and Infrastructure Engineering, 32(5), 361-378.
- 9. Khatib, O., (1999), Mobile manipulation: The robotic assistant, Robotics and Autonomous Systems, 26(2–3), 175-183.
- 10. Zhou, D., Xu, K., Lv, Z., Yang, J., Li, M., He, F., Xu, G., (2022), Intelligent manufacturing technology in the steel industry of china: A review, Sensors, 22(21), 8194.
- 11. Molleda, J., Usamentiaga, R., García, D. F., Bulnes, F. G., Espina, A., Dieye, B., Smith, L. N., (2013), An improved 3D imaging system for dimensional quality inspection of rolled products in the metal industry, Computers in Industry, 64(9), 1186-1200.
Biography
- Song-Eun Park
Researcher at the Integrated Robotics Systems Research Division, Korea Institute of Robotics & Technology Convergence (KIRO), Republic of Korea. His researchinterest is mobile robot.
- Hyung-Jun Kim
Researcher at the Integrated Robotics Systems Research Division, Korea Institute of Robotics & Technology Convergence (KIRO), Republic of Korea.His research interest is embedded controlsystem.
- Han-Gyeol Kim
Senior Researcher at the Integrated Robotics Systems Research Division, Korea Institute of Robotics & Technology Convergence (KIRO), Republic of Korea. His research interest is AI based robot control.
- Sung-Ho Hong
Senior Researcher of Integrated Robotics Systems Research Center in Korea Institute of Robotics and Technology Convergence. His research interest is embedded controlsystem.
- Yong-Jun Choi
Principal Researcher & Head of Intelligent Manufacturing Robotics Research Center in Posco Holdings
- Seung-Ho Lim
Senior Researcher of Intelligent Manufacturing Robotics Research Center in Posco Holdings
- Jaeyoul Lee
Director and Principal Researcher at the Integrated Robotics Systems Research Division, Korea Institute of Robotics & Technology Convergence (KIRO). Republic of Korea. His research interests is optimal integration technologies for robotic systems.