ABSTRACT
Magnetic gears transmit torque via non-contact electro-magnetic coupling, which eliminates mechanical contact and significantly reduces wear, backlash, and noise compared to traditional mechanical gears. These benefits make magnetic gears particularly appealing for high-precision, high-reliability applications. However, achieving both high torque density and high gear ratios necessitates an optimized structural design that promotes efficient magnetic flux distribution while minimizing leakage and saturation. This study focuses on a hollow-type magnetic gear for collaborative robots that offers a high gear ratio. It employs topology optimization in conjunction with finite element analysis (FEA) to enhance torque density and efficiency. Key design variables, such as the geometry of the ferromagnetic core and the arrangement of permanent magnets, were optimized to increase average torque and reduce torque ripple and electro-magnetic losses. A prototype based on the optimized model was fabricated, and its performance was validated using a conventional direct torque measurement system. Experimental results were compared with simulation predictions to evaluate accuracy and analyze loss characteristics. The findings demonstrate the effectiveness of the proposed optimization approach and provide practical guidelines for designing high-efficiency magnetic gears suitable for advanced drive systems, including electric mobility and renewable energy applications.
-
KEYWORDS: Magnetic gear, Collaborative robot, Torque, Torque density, Torque ripple, Efficiency
-
KEYWORDS: 자기 감속기, 협동로봇, 토크, 토크밀도, 토크리플, 효율
1. 서론
최근, 제조업에서 산업 자동화 그리고 스마트 팩토리 구축에 대한 수요가 증가함에 따라 작업자와 물리적 분리 없이 동일 작업 공간에서 상호작용하고 협력 작업을 수행할 수 있는 능력을 제공하는 협동 로봇(Collaborative Robot)이 주목받고 있다[
1-
5]. 이러한 협동 로봇은 고도의 위치 정밀도와 속도 제어 성능을 요구하며, 이를 구현하기 위해 고성능 감속기 구동 시스템이 필수적으로 적용된다. 현재 상용화된 협동 로봇의 감속기 구동부는 주로 유성기어(Planetary Gear) 또는 하모닉 드라이브(Harmonic Drive) 등 기계식 기어 기반 기술에 의존한다[
2]. 그러나 기계식 기어는 접촉식 동력 전달 구조를 가지므로 장시간 운용 시 마모, 윤활 문제, 백래시 및 소음 발생 등 근본적인 한계가 존재한다. 또한, 짧은 유지보수 기간과 이로 인해 유지보수 주기 단축과 부품 교체 비용 증가, 그리고 높은 마찰 손실에 따른 효율 저하가 발생하며, 이는 곧 시스템 신뢰성 저하 및 전체 소유 비용(Total Cost of Ownership, TCO) 증가로 이어진다[
2,
3]. 특히 협동 로봇은 작업자와 직접 상호작용하는 특성상 안전성 확보가 중요한데, 기계식 기어는 충격 전달 및 비상 정지 시의 충격 완화 성능이 부족하다는 점에서 추가적인 리스크를 내포한다[
4]. 이러한 문제를 해결하기 위해 비접촉식 동력 전달 방식을 기반으로 하는 자기식 기어(Magnetic Gear, MG)가 차세대 대안 기술로 부상하고 있다[
1-
3].
MG는 전자기력 기반의 토크 전달을 통해 기계적 접촉을 완전히 제거함으로써 마모와 윤활이 필요 없고, 소음과 진동이 현저히 낮으며, 백래시 문제 또한 발생하지 않는다[
4,
5]. 나아가, 출력 및 입력 측 간의 자기적 결합 특성 덕분에 외부 충격 시 토크 전달이 즉시 차단될 수 있어 협동 로봇에서 요구되는 안전성 측면에서 유리하다. 그러나 MG는 기존 하모닉 드라이브 대비 동일 부피에서 높은 기어비 및 토크 밀도를 확보하는 것이 쉽지 않으며, 자속 누설과 철심 포화 현상에 따른 효율 저하 문제도 설계 단계에서 반드시 고려해야 하는 도전 과제이다[
6,
7].
본 논문에서는 협동 로봇의 하모닉 드라이브를 대체하기 위한 고기어비 타입 중공형 MG 시스템 중 단층 MG 시스템에 대하여 제안하며, 이를 통해 로봇 구동부의 안전성, 신뢰성, 저소음 특성을 강화하고, 고토크 밀도 및 고효율을 달성하는 것을 목표로 한다. 이를 위해 다목적 최적화 알고리즘인 알고리즘과 유한요소해석(Finite Element Analysis, FEA) 기반의 전자계 토폴로지 최적화 기법을 적용하여 핵심 설계 인자인 코어 형상, 자석 배열 그리고 자속 집중 구조를 체계적으로 설계한다. 나아가, 최적화 결과를 기반으로 시제품을 제작하여 구동 특성 실험을 수행함으로써 해석 모델 그리고 시험 데이터 결과간 비교 분석을 진행하여, 제작 및 설계 오차를 최소화하는 설계 메커니즘을 고찰한다.
2. 중공형 자기식 기어의 설계
2.1 마그네틱 기어의 구조 및 설계 사양
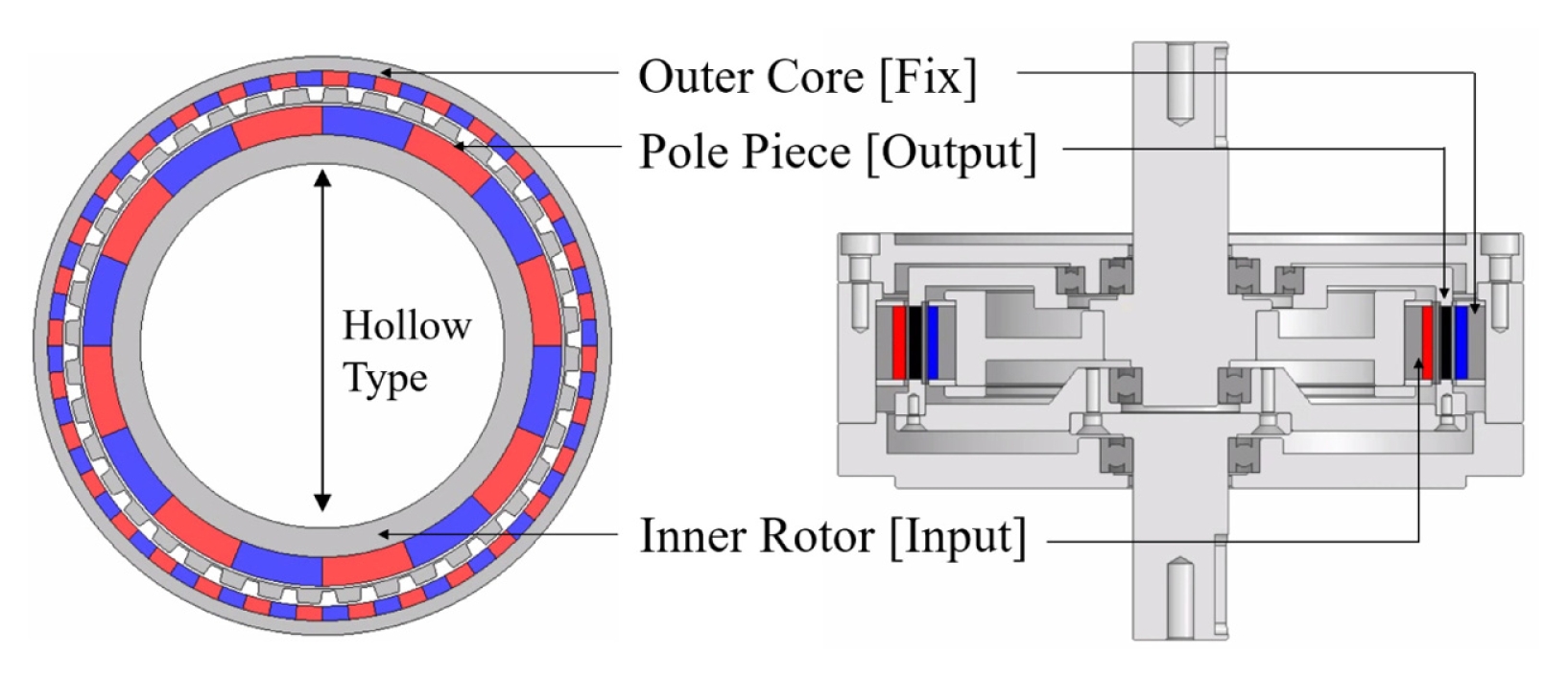
MG는 기존 기계식 기어의 치 형태를 영구자석으로 대체하여 전자기력을 이용하여 구동력을 전달하는 비접촉식 전자기 구동 장치이다. 이러한 방식은 마찰 및 윤활 문제를 근본적으로 제거하고, 소음과 진동을 크게 줄이며, 백래시 발생을 억제할 수 있다는 점에서 기존 기계식 감속기에 비해 구조적 우수성을 갖는다. MG는
Fig. 1과 같이 주로 이너 로터(Inner Rotor), 아우터 스테이터(Outer Stator) 그리고 폴피스(Pole Piece)로 세가지의 핵심 구성 요소로 구성된다. 이렇게 구성된 MG는 구조적으로 두가지 방법을 통해 구동이 된다. 감속기 기준, 입력부가 이너 로터에 연결되어서 회전력을 제공할 때, 폴피스가 회전하는 구조와, 최 외각 아우터 스테이터가 회전하는 방법이 있다. 이러한 회전 동작에 의해 발생되는 기어비는
식(1)과 같으며, 이너 로터, 아우터 스테이터의 극수와 폴피스 수의 정의는
식(2)와 같다[
3-
6].
여기서, Gr1은 이너 로터와 폴피스가 회전할때의 기어비, Gr2는 이너 로터와 외측 아우터 스테이터가 회전할때의 기어비, Ppp는 폴피스의 수, Pi는 이너 로터의 극수, Pu는 아우터 스테이터의 극수를 의미한다.
또한, 폴피스를 출력측 회전체로 설정하여 구조 설계를 진행하면, 구조적 강건성이 확보된 두개의 회전체 구동하기 위해서는 최대 4개의 베어링이 필요하며, 각각의 베어링은 Input Shaft–Housing, Pole Piece–Housing, Input Shaft–Pole Piece, Output Shaft–Housing 사이에 배치된다. Pole Piece–Housing 베어링을 제거하여 3개의 베어링에 의해 MG가 구동 될 수는 있지만, 고 반복 및 제어 정밀성 그리고 축 정렬에 대한 신뢰성 확보를 위해 최대 개수의 베어링이 적용되었다.
Table 1은 중공형 자기식 기어 설계 사양 및 목표이며 추후 최적 설계 목적 함수와 같다.
2.2.1 MG 설계를 위한 NSGA-II 알고리즘의 적용
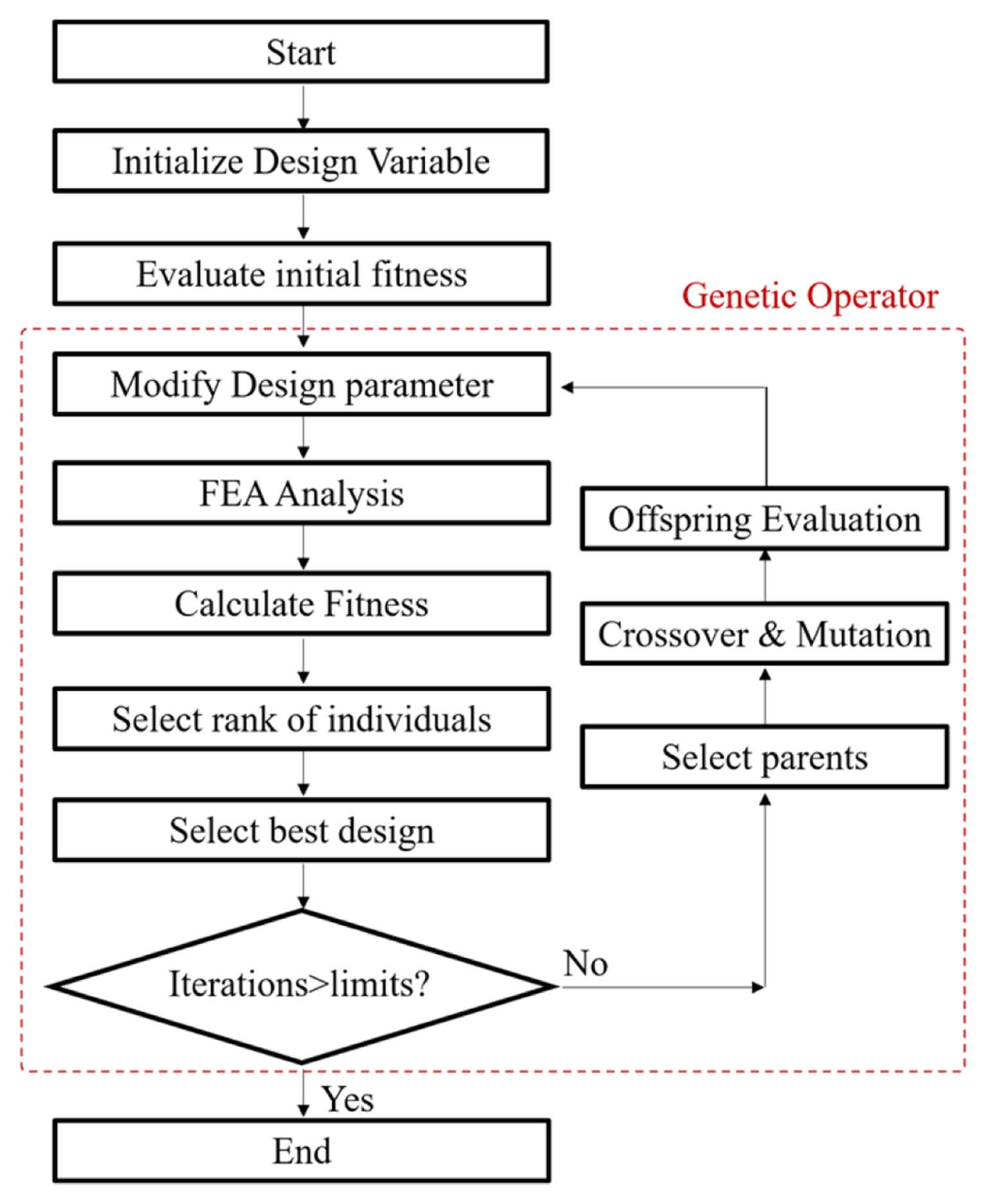
다목적 최적화 기법 중 하나인 NSGA-II (Non-dominated Sorting Genetic Algorithm II) 알고리즘은 파레토 최적해 집합을 추출하여 연관성 있는 복수의 목적함수를 동시에 고려하며, 비 지배 정렬 과정을 통해 해 집합의 우수성을 단계적으로 분류하고 파레토 지배 관계에 따라 해의 우열을 결정한다. 또한, 군집 거리를 도입하여 해의 다양성을 유지하고, 조기 수렴을 방지하는 특징을 갖는다[
8]. 이러한 구조적 장점으로 인해 NSGA-II는 구조 최적화, 구동계 설계 등 다양한 공학 분야에서 활용되고 있다[
9].
NSGA-II 기반 최적화 과정은
Fig. 2의 순서도와 같이, 초기 해 집합의 생성, 적합도 평가, 비 지배 정렬 및 군집 거리 계산 선택 그리고 교차 및 돌연변이 연산 수행, 새로운 세대의 해 집합 업데이트 과정을 반복 수행하는 방식으로 구성된다. 다목적 최적화 진행을 위한 목적 함수는
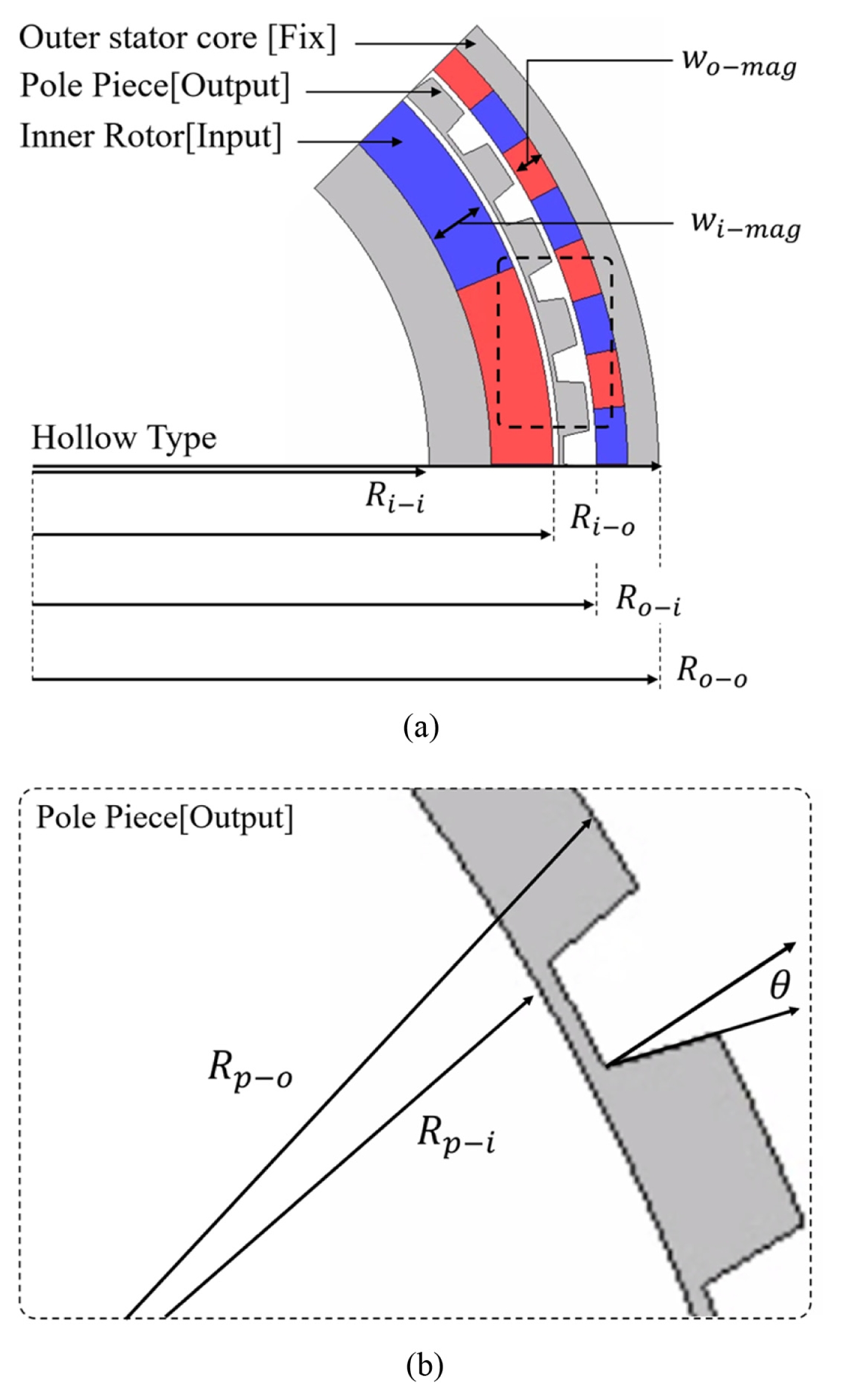
Table 2와 같이, 출력단 토크, 토크리플, 출력밀도, 총 자기식 기어의 무게 그리고 효율로 구성된다. 나아가 목적함수를 달성하기 위해서는 목적함수간 관계를 동시에 고려한 파레토 최적해 집합을 도출하고, 다양한 설계 대안 중 우수한 균형점을 선택할 수 있도록 MG의 핵심 설계 인자인 이너 로터 및 아우터 스테이터의 극수, 폴피스의 개수, 자석 각각의 두께, 폴피스의 형상, 이너 로터 및 아우터 스테이터의 강판 두께를 알고리즘에 연계하여, 최적화 설계를 진행한다. 설계 인자의 선정 및 설계 인자의 범위는
Fig. 3 및
Table 3과 같다. 나아가, 최종 결과에 대한 수렴성을 확보하기 위해 50개의 개체와 120번의 세대수를 거쳐 최적화를 진행한다.
2.2.2 최적화 설계 결과
최적화에 활용되는 목적함수는 전자장 수치해석(Finite Element Method)을 통해 도출된 전자계 데이터를 기반으로 설정되었다. 본 수치해석에서는 자기회로 내 자속 경로의 집중도, 포화 현상, 토크 리플 억제 성능 등에 직접적인 영향을 미치는 요소들을 변수로 선정하였다. 구체적으로는 이너 로터(Inner Rotor)의 코어 및 자석의 두께, 폴피스의 각도와 내/외측 반지름, 그리고 아우터 스테이터(Outer Stator)의 코어 및 자석의 두께를 포함하며, 이러한 변수들의 조합을 통해 최적화를 수행하였다. 전자장 해석에는 자기적 경계조건(Magnetic Boundary Conditions)과 대칭 조건(Symmetry Conditions) 그리고 0.5 mm 이하의 mesh 사이즈 등 기본적인 전자계 수치해석 기법에서 사용되는 경계조건들이 적용되어 해석의 정확도를 확보하였다[
10].
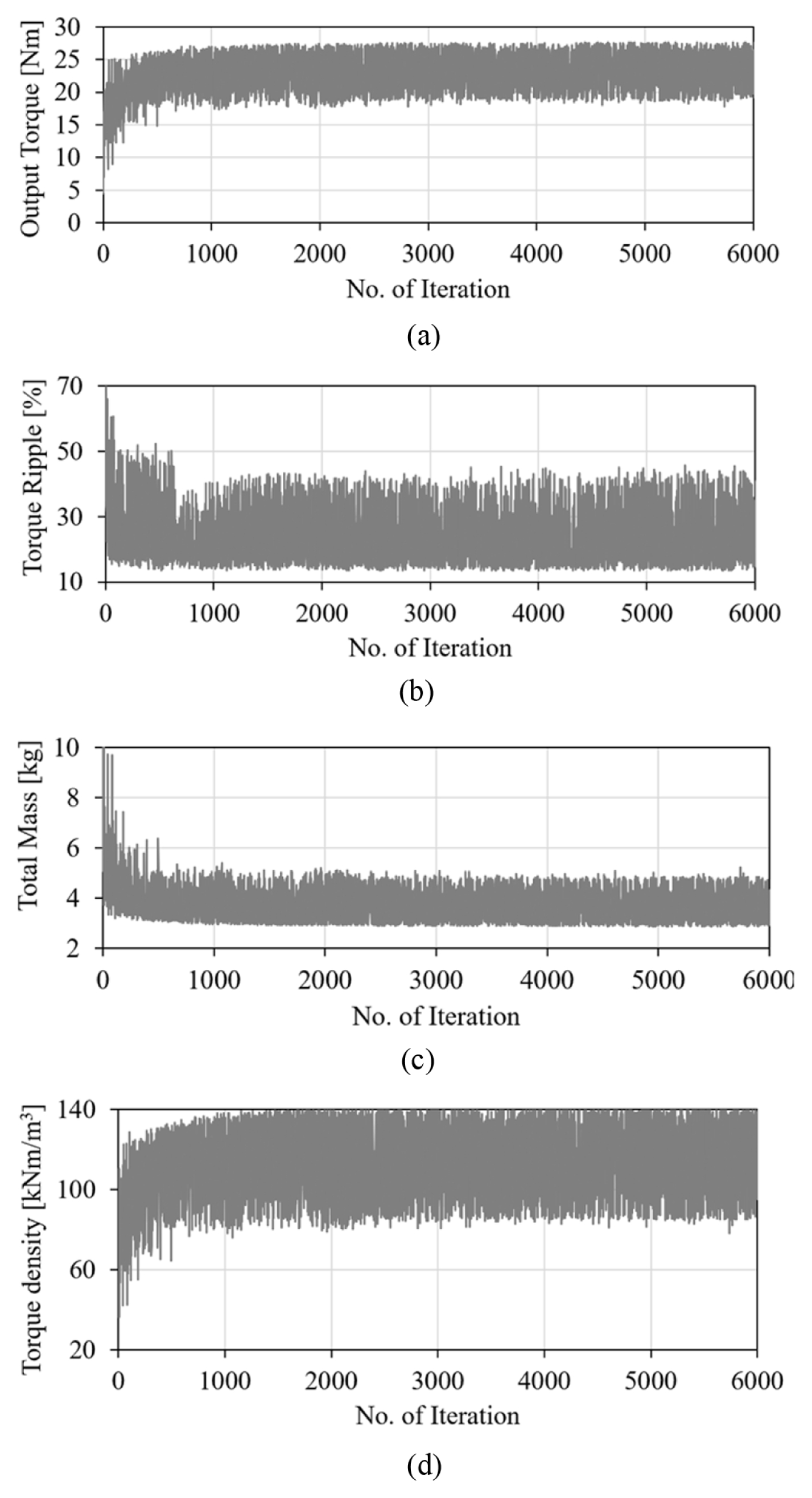
NSGA-II 알고리즘은 각 세대마다 파레토 최적해 집합을 도출하여 효율, 토크 그리고 토크 밀도 간의 상충 관계를 점진적으로 개선시켰으며, 최적화 과정에서 비 지배 정렬과 군집 거리 계산을 통해 해의 다양성과 우수성을 동시에 확보하였다. 최적화 진행 결과는
Fig. 4와 같이 각각의 목적 함수에 대해 Iteration이 증가될 수록 결과 값에 대한 수렴의 정도를 통해 확인할 수 있다.
최적화 결과는
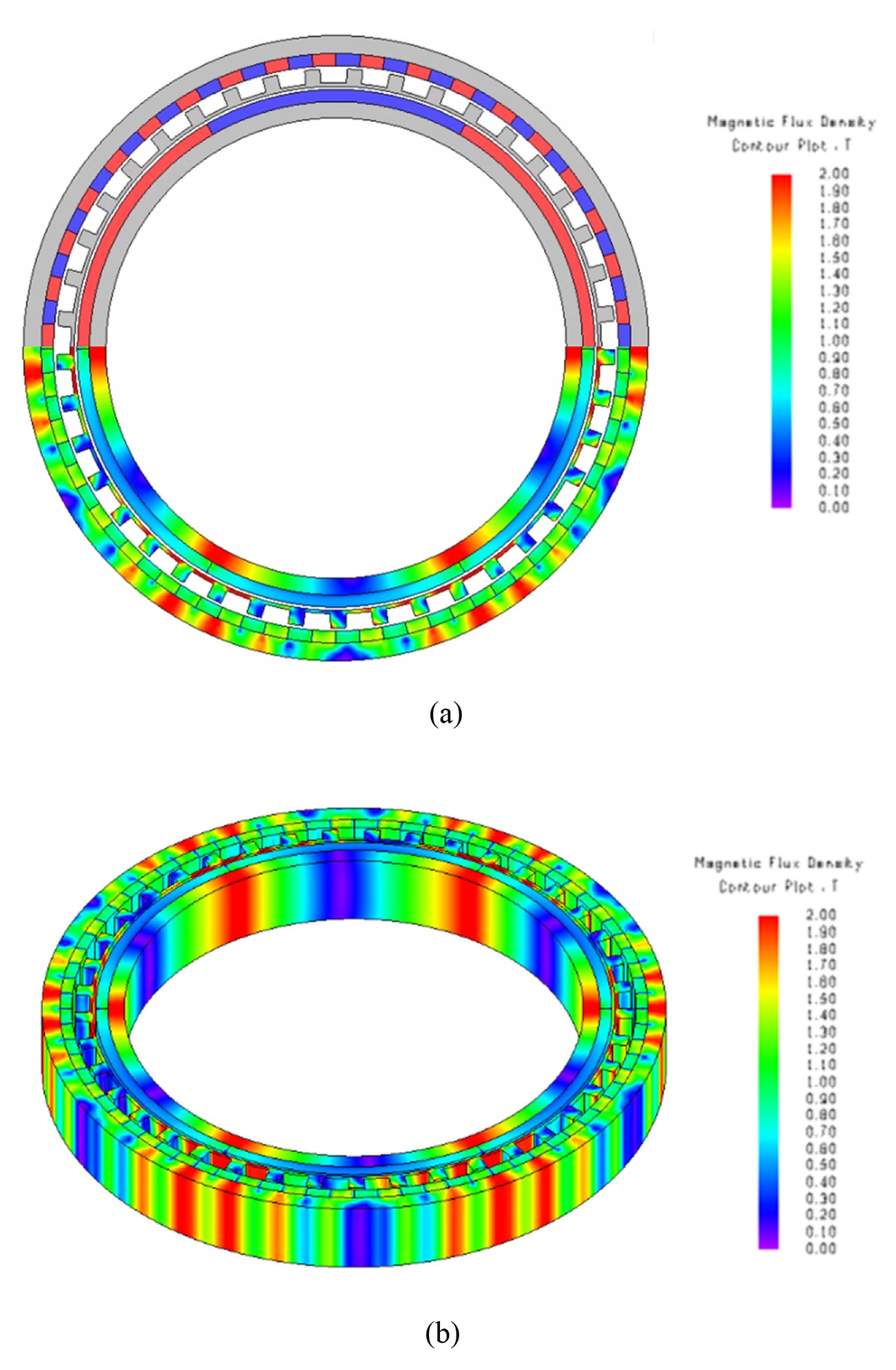
Table 4와 같으며, 최종적으로 선정된 변수가 적용되었을 때의 2D 그리고 3D 형상 별 자속 밀도 분포 데이터를
Fig. 5에서 확인할 수 있다.
최적화 과정에서 토크 리플 최소화라는 목적함수를 만족시키기 위해 립 두께와 폴피스 각도를 조정하여 자속 포화도를 균일하게 분포시켰다. 또한, 내측 회전자와 외측 고정자의 코어 두께, 자석 두께를 각각 변화시킴으로써 평균 토크의 크기를 향상시키는 결과를 도출하였다.
3. 자기식 기어 시작품 제작 및 시험 평가
3.1 MG 시작품 제작
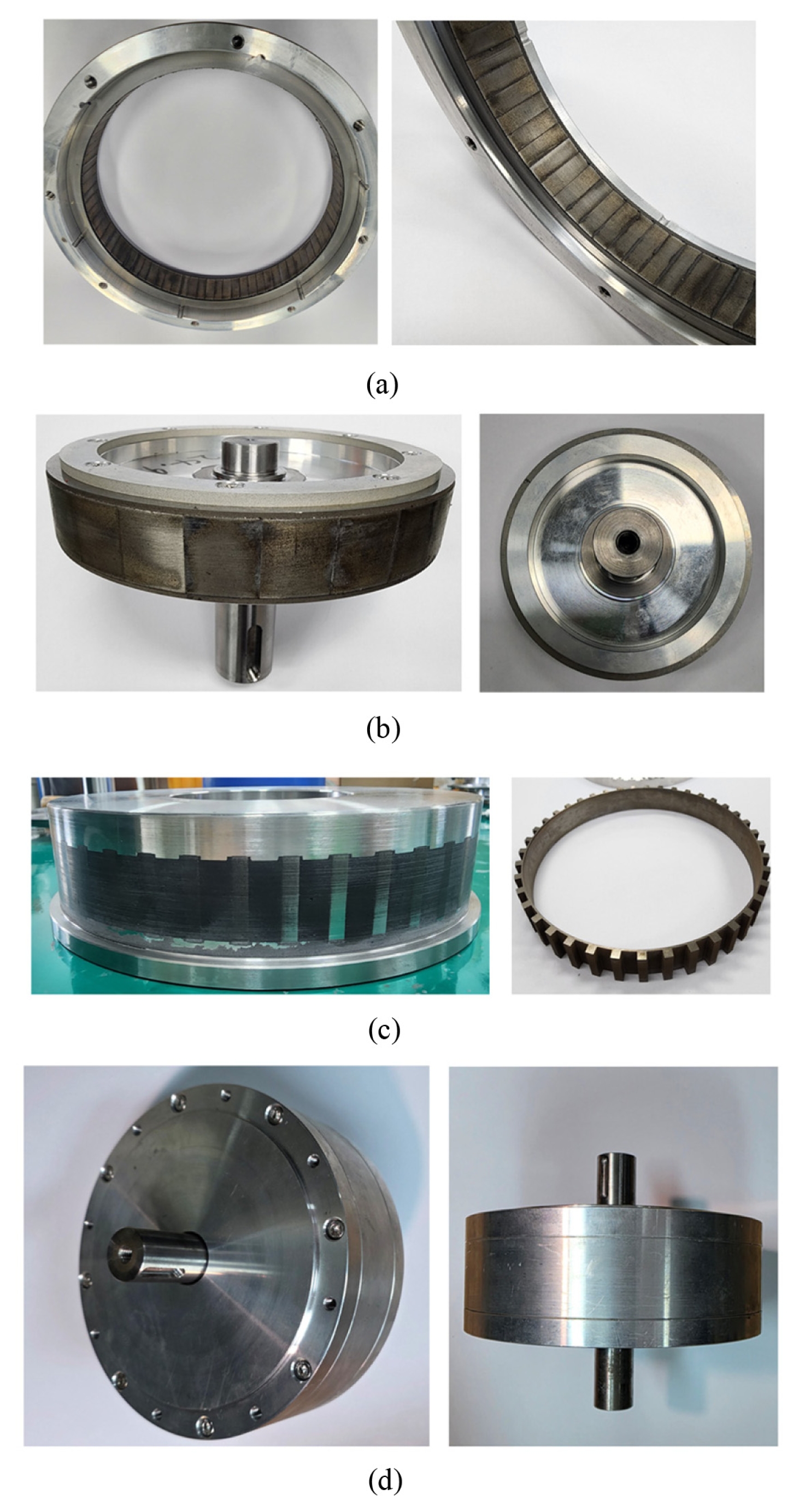
MG 시작품의 액티브 파트는
Table 4와 같이 최적화 설계 결과를 바탕으로 제작되었으며, 구조적 강건성을 확보하기 위해 폴피스 및 이너 로터 구동시 발생되는 하중의 분산을 고려하여 기구적 강건성이 확보된 구조를 적용하였다. 특히, MG의 폴피스 구조는 고속 구동 및 고 토크 운전 과정에서 가장 큰 비틀림 응력이 집중되기 때문에 구조적 안정성이 확보되지 않는다면 구동 중 파손 및 성능의 저하로 이어진다. 이러한 현상을 방지하기 위해 시작품 제작시 폴피스 사이에 에폭시 몰딩을 적용하여 충격 하중 및 진동에 대한 내구성을 확보하였다. 또한, 적층 방향으로는 고어간 본딩 공정을 도입하여 이차적인 비틀림 응력에 대한 보강을 적용하였다. 또한, 이너 로터의 경우 고속 회전시 하우징 구조와 결합되어 폴피스 및 외측 코어에 간섭이 발생되지 않게 하는 구조를 적용하였다. 최종적으로 제작된 MG의 각 파트는
Fig. 6과 같다.
제작된 MG 시제품의 성능을 검증하기 위하여 구동 특성 시험 평가를 수행하였으며, 입력측 그리고 출력측 토크를 측정하여 MG의 효율을 추정하였다. MG의 효율은 일반적인 동력 전달 장치와 동일하게, 입력측에 인가된 기계적 전력 대비 출력측에서 발생하는 전력의 비율로 정의된다. 구체적으로, 입력축에 인가된 토크와 속도를 곱하여 입력 전력을 계산하고, 출력에서의 토크와 속도의 곱으로 출력 전력을 산정한다. 이때 효율은
식(3)과 같다.
여기서, η는 효율, Tout와 ωout는 출력측 토크와 속도 그리고 Tin와 ωin는 입력측 토크와 속도이다.
MG의 주요 손실 메커니즘은 크게 두 가지로 구분된다. 첫째, 자석으로부터 발생된 자속이 강판에 쇄교하면서 발생되는 철손(Iron Loss) 그리고 교번 자계로 인해 자석에 유도되는 와전류 손실이다[
11,
12]. 두번째로는 베어링 마찰, 축 간 정렬 불량 등에서 기인하는 기계적 손실이다. 기계 손과 같은 경우, 실제 해석에서 반영할 수 없기 때문에 실험적 데이터에 의거 후처리를 통해 최종 효율에서의 반영이 필요하다.
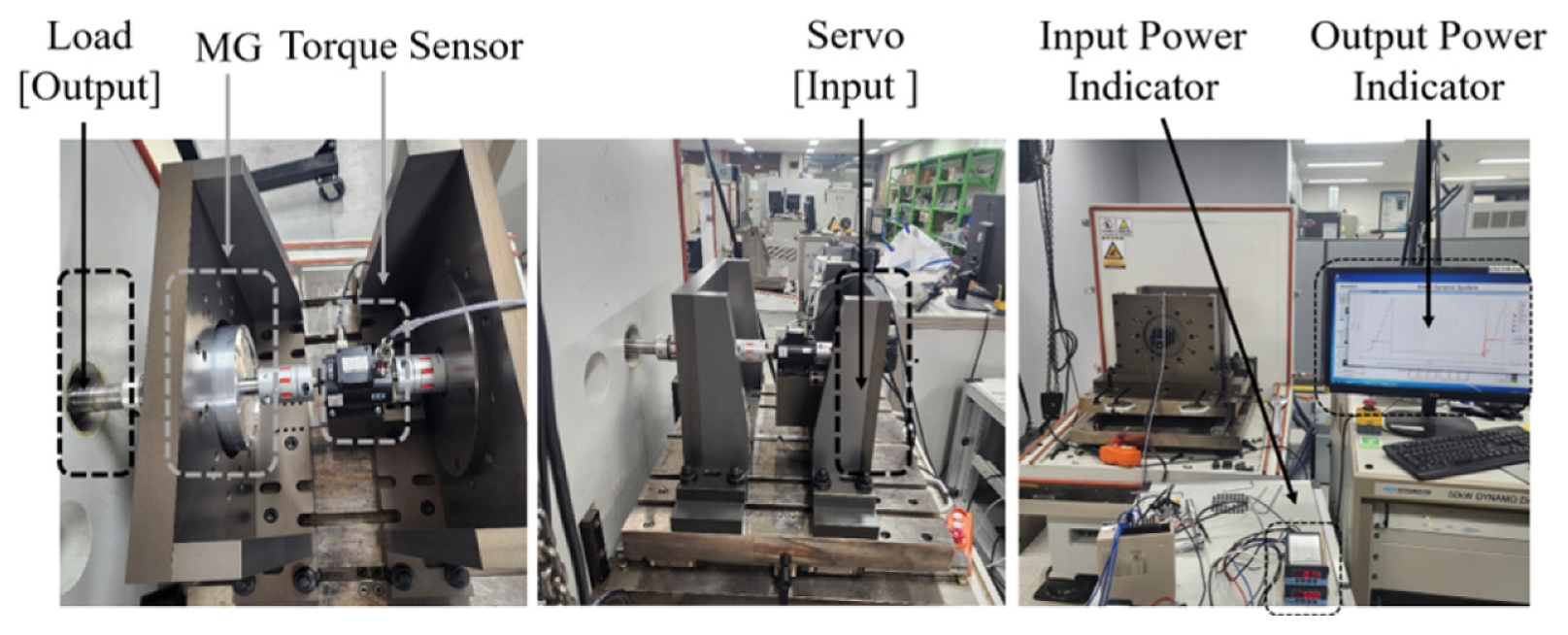
본 연구에서는
Fig. 7과 같이, MG 시제품의 입력측과 출력측을 각각 서보 모터 시스템과 연결하여 효율 평가 시험 장치를 구성하였다. 입력 서보 모터는 부하 조건에 따라 제어 토크를 인가하였으며, 출력 서보 시스템은 반력 측정 및 동특성 평가에 활용되었다.
시험 조건은
Table 5 정리하였으며, 입력 속도 및 토크를 변화시켜 효율 변화를 관찰하였다.
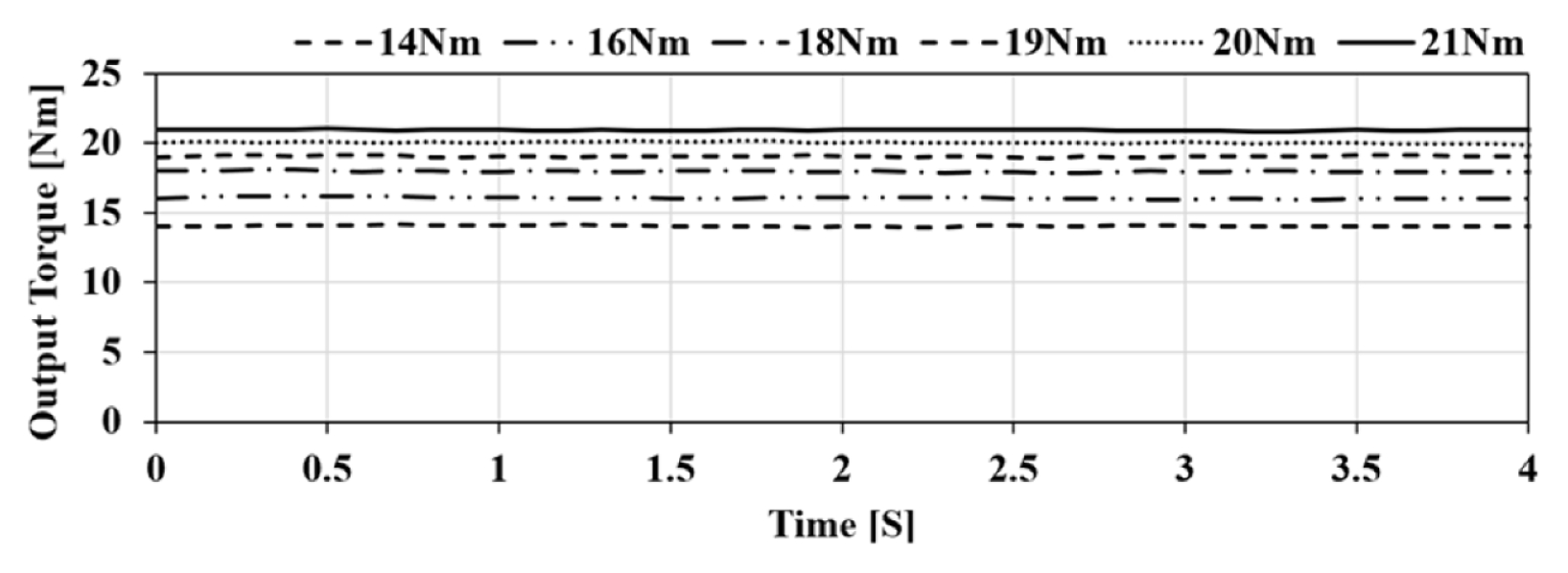
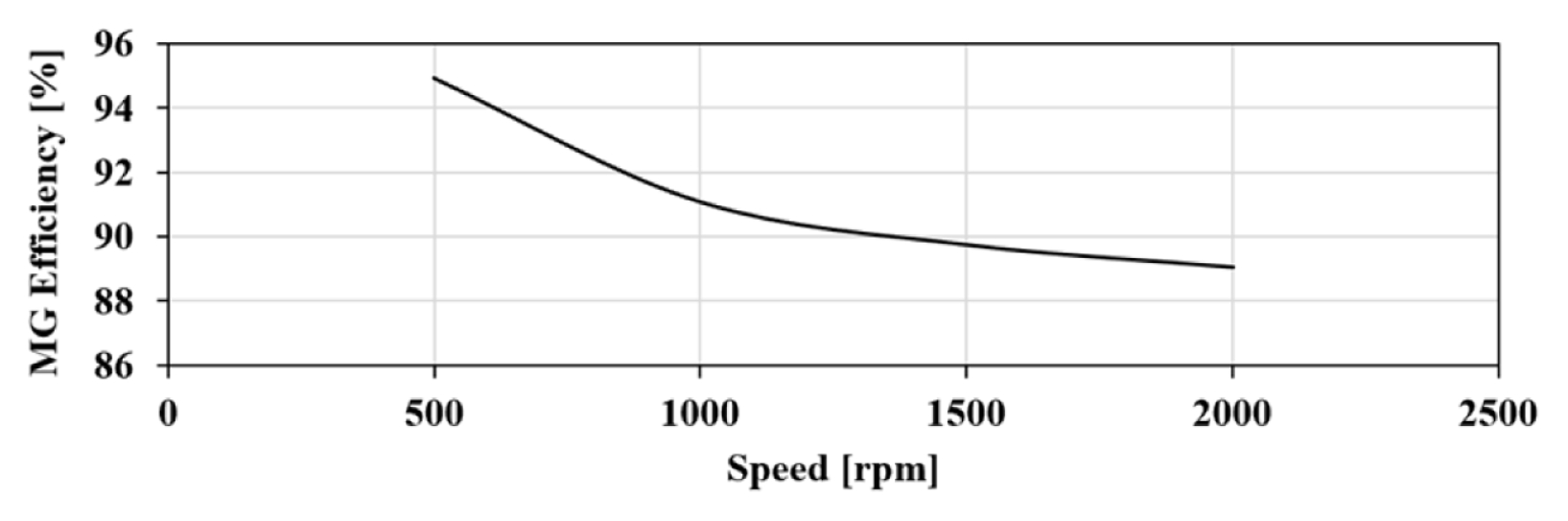
Fig.8은 MG의 출력측 토크 파형을 나타낸 것으로, 부하 토크 조건에 따른 토크 리플의 크기와 파형 왜곡 정도를 확인할 수 있다. 또한,
Fig. 9는 부하 토크 21 Nm, 조건에서 속도 별 효율 측정 결과를 도시하였다. 시험 결과, 해석 치의 결과인 26.8 Nm가 아닌 23 Nm에서 최대 토크가 추출되었으며, 무부하 MG 구동 시험을 통해 최대 입력측 0.2 Nm, 출력측 3 Nm의 기계손에 의한 정지 토크 발생으로 실제 설계 치 보다 낮은 출력 토크가 도출됨을 확인하였다. 따라서, 해석시 98.8%의 높은 전자계 효율에서 실 구동시 발생되는 정지 토크 분에 대한 기계적 손실의 반영을 통해 시험-해석 간 오차를 감소시킬 수 있다.
4. 결론
본 연구에서는MG의 성능 향상을 위해 다목적 최적화 알고리즘을 적용하여 액티브 파트에 대한 설계 최적화를 수행하고, 이를 기반으로 시제품을 제작하여 실험적 검증을 진행하였다. 최적화의 목표는 고토크 밀도화 및 경량화를 동시에 달성하는 것으로, 설계 변수로는 이너 로터 및 아우터 스테이터의 자석 두께, 코어 두께, 폴피스 틸팅 각도, 브릿지 두께 등을 설정하였으며, 평균 토크, 토크 리플, 토크 밀도, 효율을 목적 함수로 구성하여 다목적 최적화를 수행하였다. 최적화 과정에서는 유한요소 해석(FEM)을 기반으로 한 전자계 분석을 통해 각 설계 변수의 영향도를 정량적으로 평가하고, 파레토 최적해 집합을 도출함으로써 상충 관계에 있는 성능 지표 간 균형을 효과적으로 조율하였다. 나아가 전자기적 성능을 글대화 할 수 있는 최적화 알고리즘의 결과를 통해 최종 설계안을 도출하고, 이를 기반으로 MG 시제품을 제작하였다. 제작된 시제품은 협동 로봇의 주요 작동 속도 범위에서 실험적으로 평가되었으며, 최대 정격 부하 조건 하에서 94% 이상의 고효율을 실현함으로써, 최적화 설계 기법의 실제 적용 가능성과 성능 향상 효과를 명확히 입증하였다. 나아가, 무부하 구동을 통해 발생되는 정지 토크의 분석으로 실제 운전 조건과 해석에서 최대 구동 토크 및 효율 결과와의 차이를 유발하는 주요 원인으로 작용됨을 확인하였다.
따라서, 실험에서는 정지 토크 등 비이상적 기계적 손실 요소를 반영함으로써 해석–실험 간 오차를 정밀하게 보정할 수 있는 기반을 마련하였다. 결론적으로, 본 연구에서 제안한 NSGAII 기반 다목적 최적화 기법은 자기식 기어의 토크 성능, 효율, 구조적 안정성 측면에서 모두 효과적인 개선을 도출하였으며, 실험을 통해 94% 이상의 높은 효율이 실현됨으로써 최적화 설계의 실효성과 기술적 타당성이 명확히 검증되었다.
FOOTNOTES
-
ACKNOWLEDGEMENT
본 연구는 2024년도 산업통상자원부 및 산업기술 평가관리원(KEIT) 연구비 지원에 의해 수행됨(No. RS-2024-00443316).
Fig. 1Structure of hollow type magnetic gear active parts
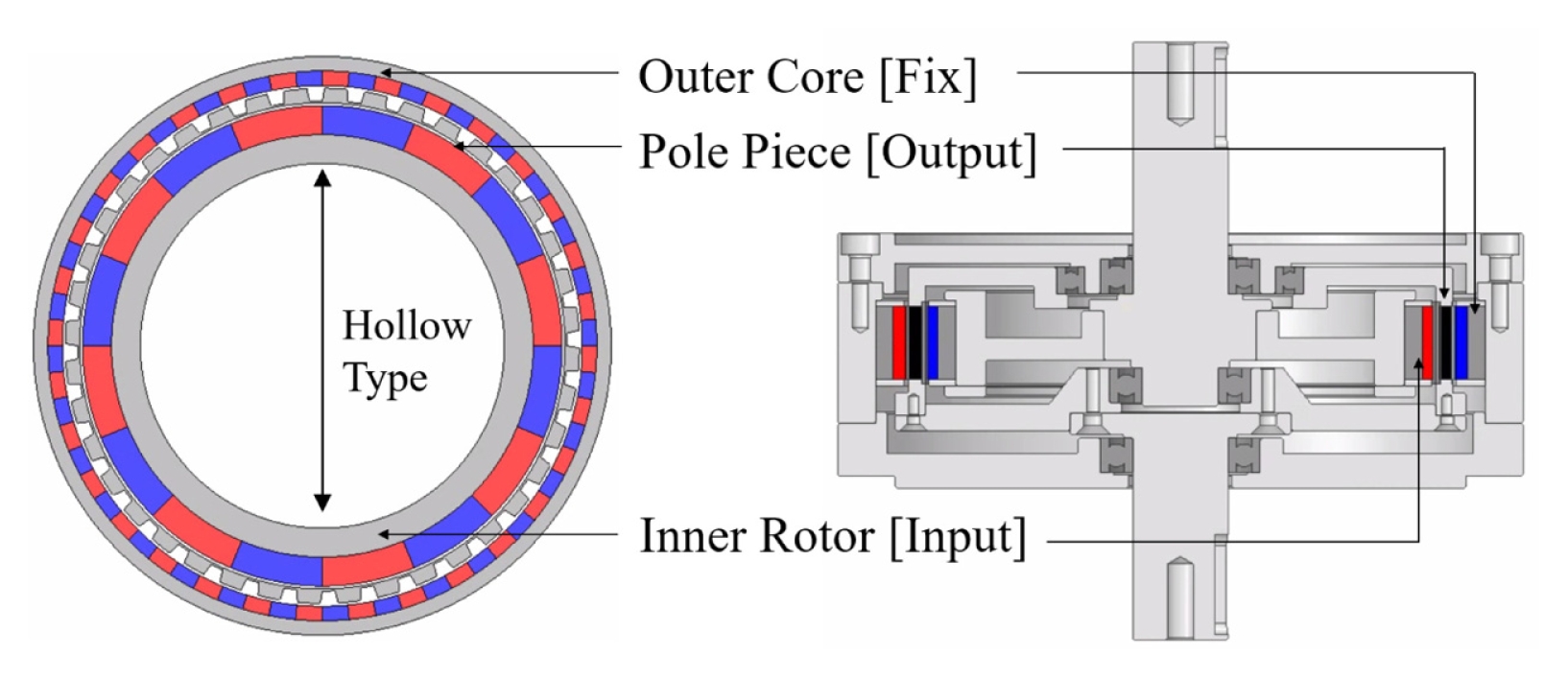
Fig. 2Follow chart of NSGA-II algorithm
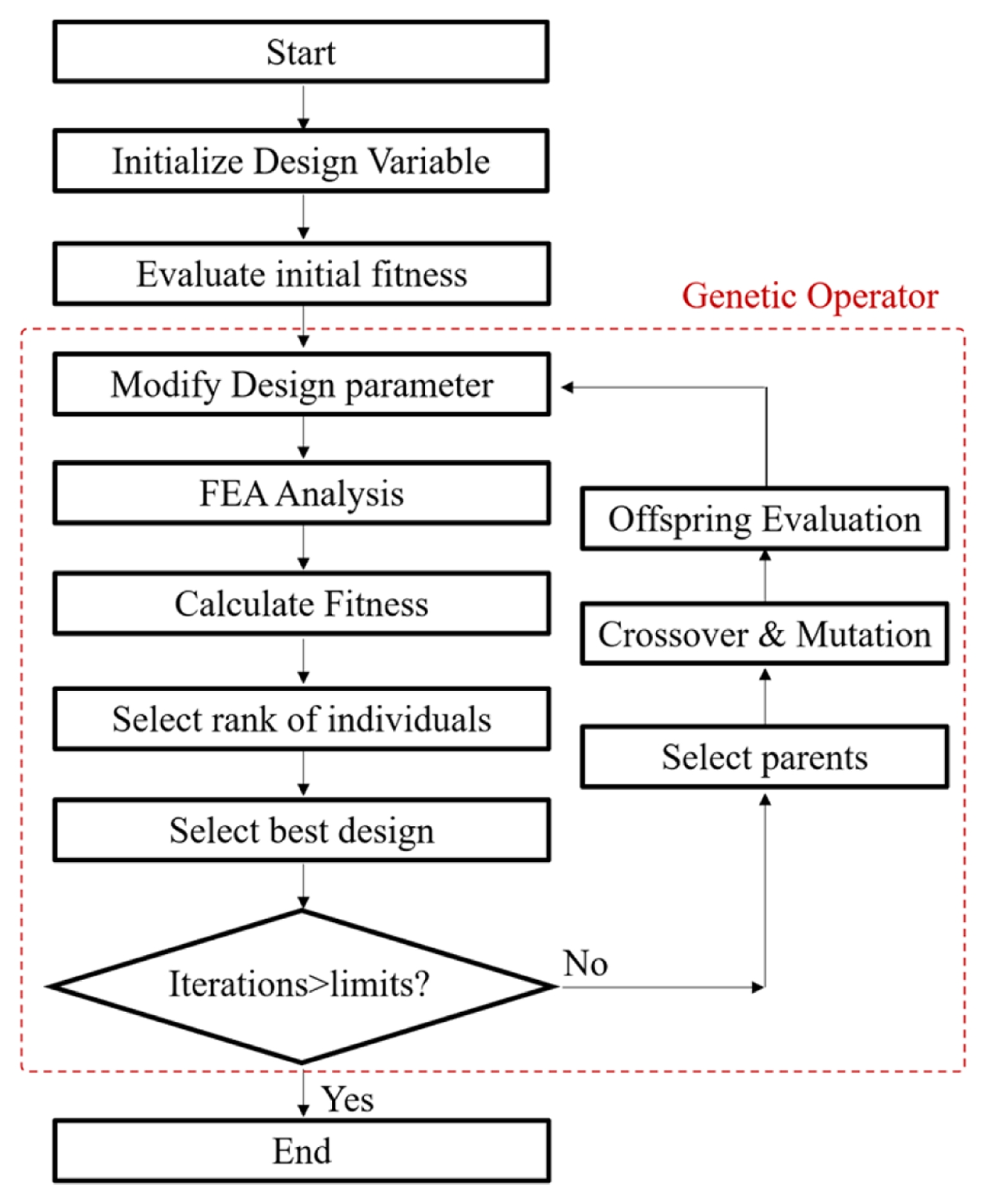
Fig. 3Design variables of MG for optimization design. (a) Design variables of MG inner rotor and outer stator, (b) Design variables of MG pole piece
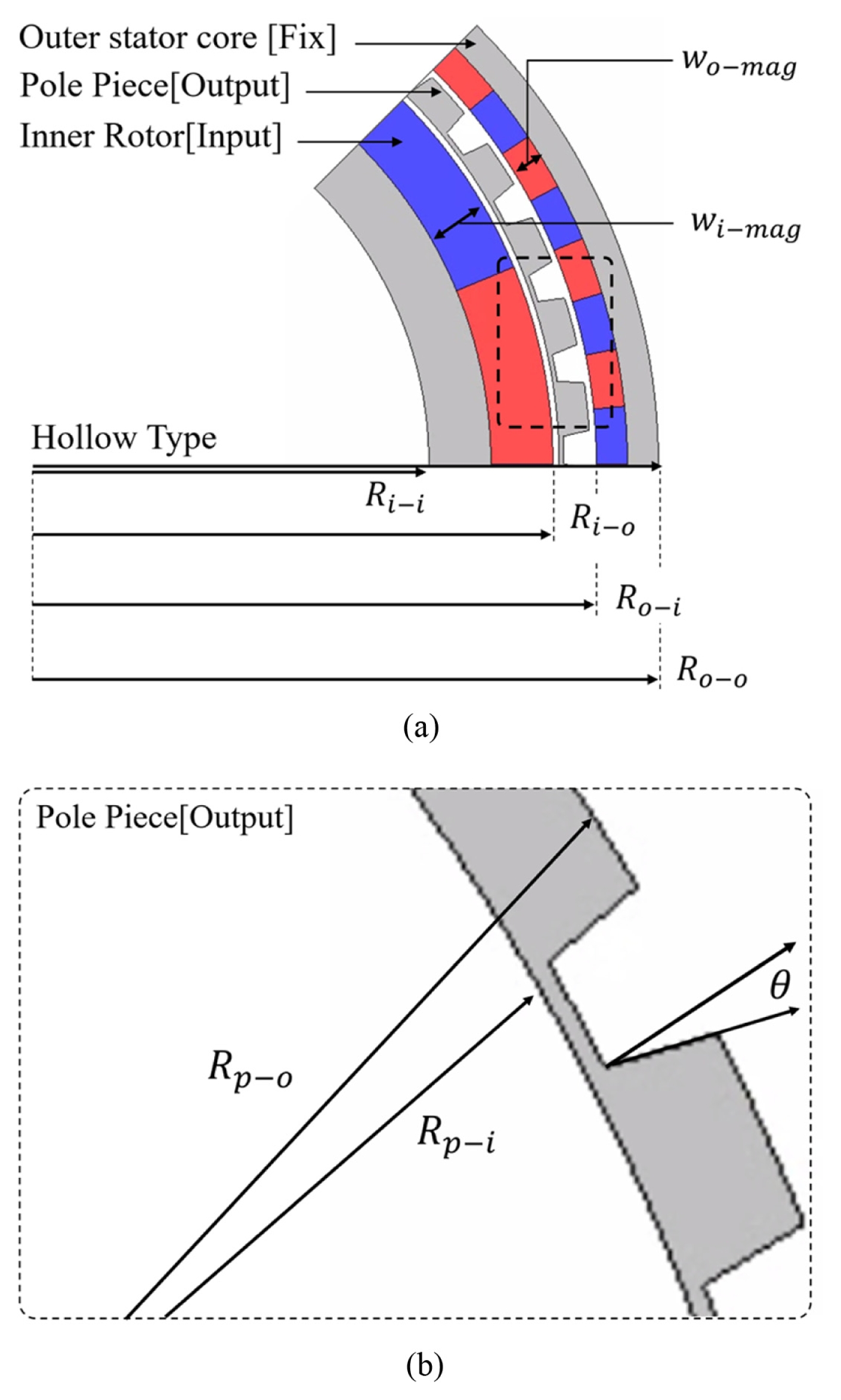
Fig. 4Design variables of MG for optimization design. (a) Output torque results of optimization algorithm, (b) Torque ripple results of optimization algorithm, (c) Total mass results of optimization algorithm, (d) Torque density results of optimization algorithm
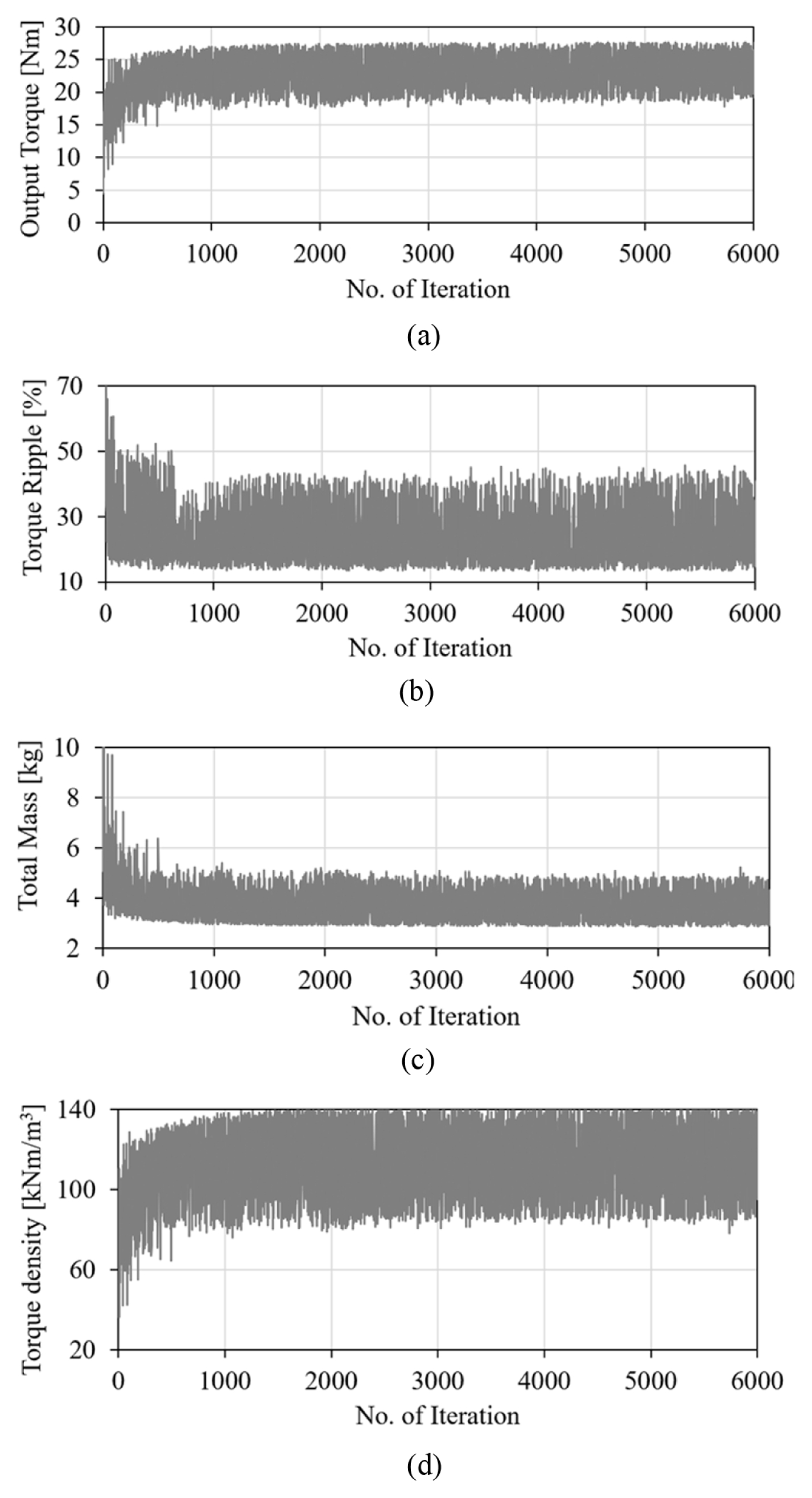
Fig. 5Flux density distribution of the final MG model with applied optimization results. (a) 2D model analysis results, (b) 3D model analysis results
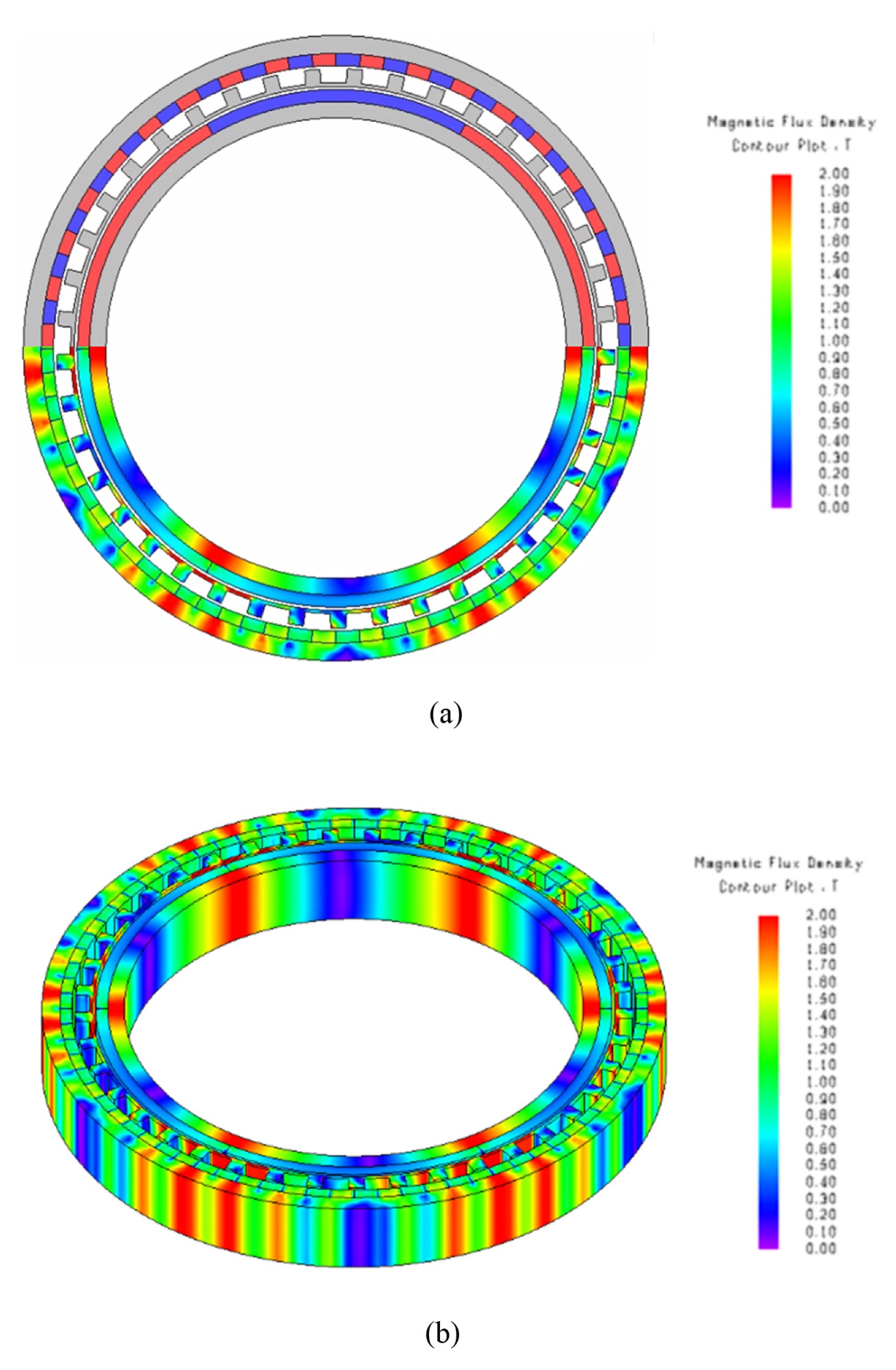
Fig. 6Main active components and prototype of the optimized magnetic gear. (a) Outer stator part of MG, (b) Inner rotor part of MG, (c) Pole piece part of MG, (d) Prototype of optimized MG
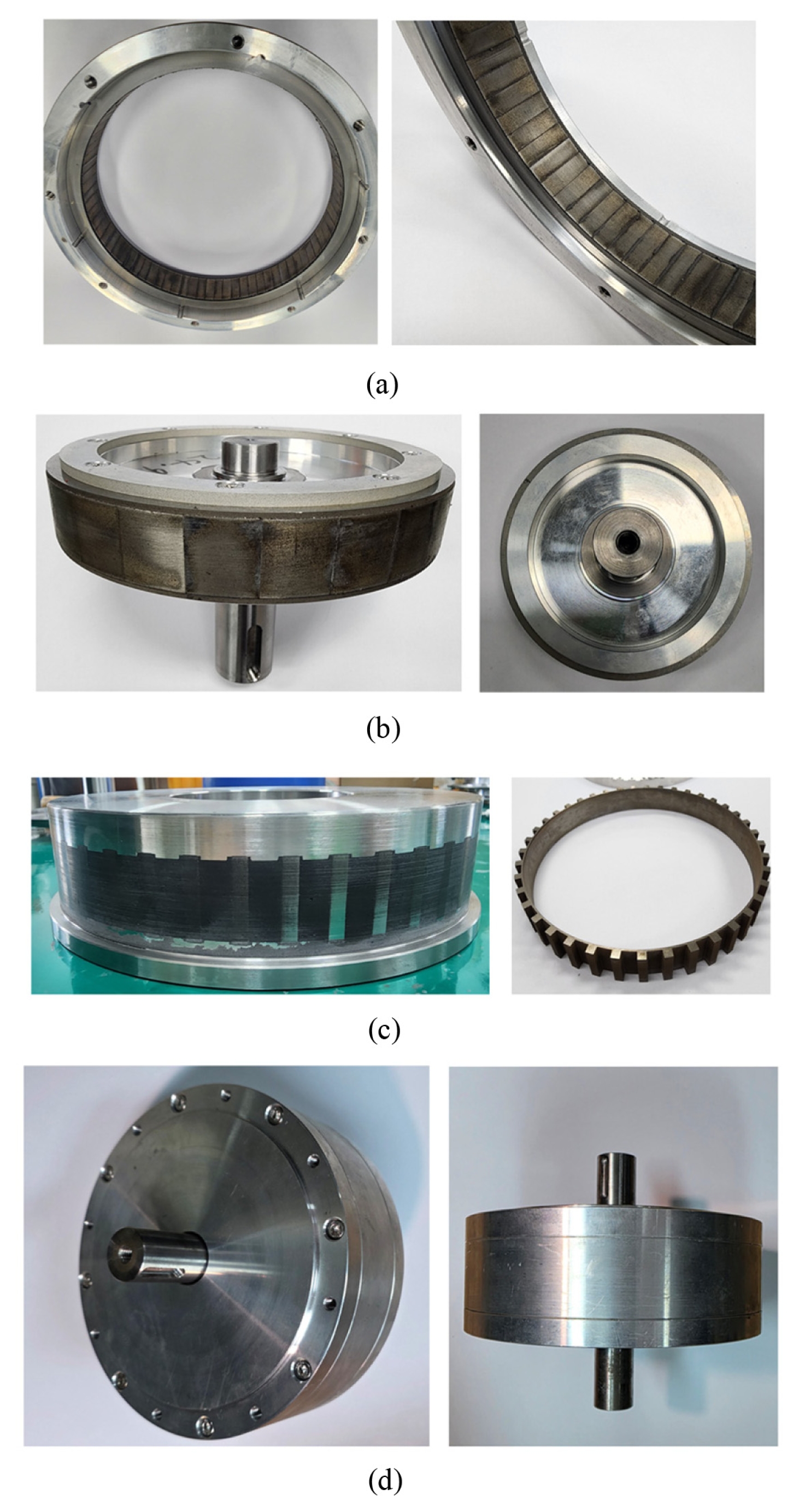
Fig. 7Main active components and prototype of the optimized magnetic gear
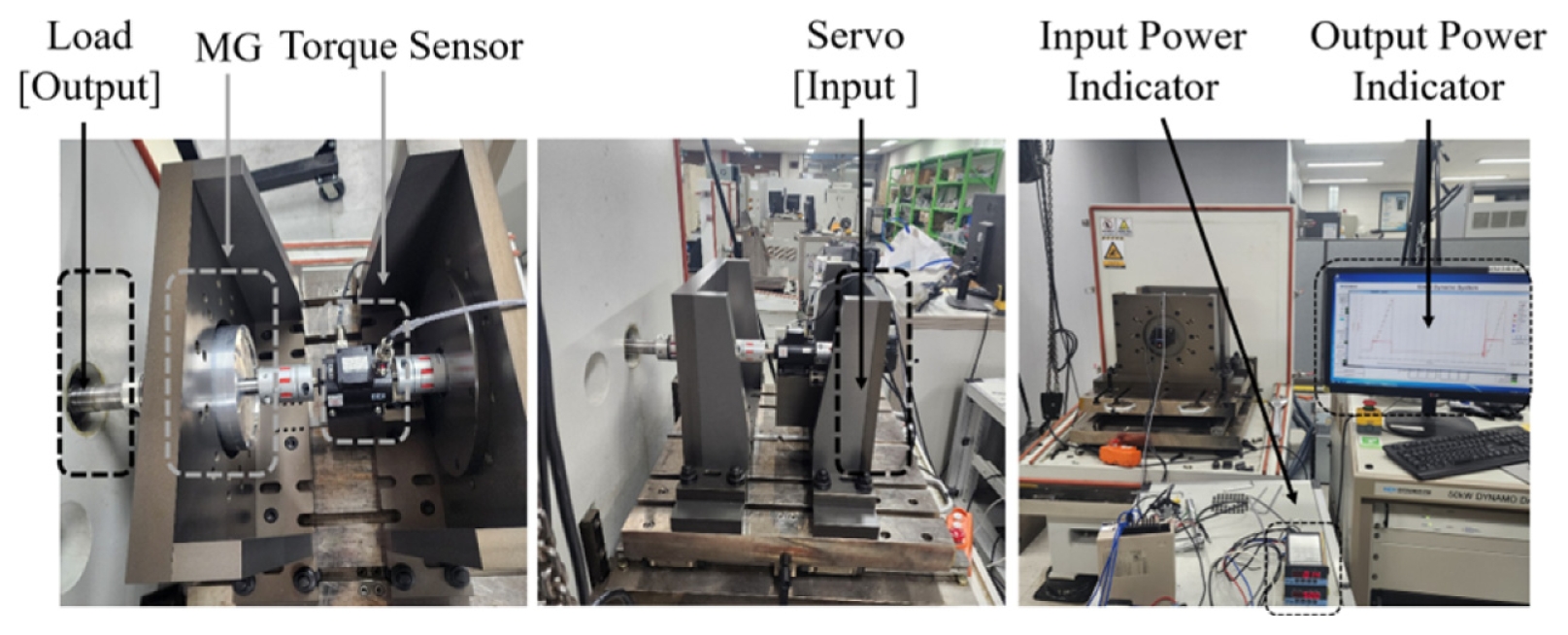
Fig. 8Torque test results of prototype MG model
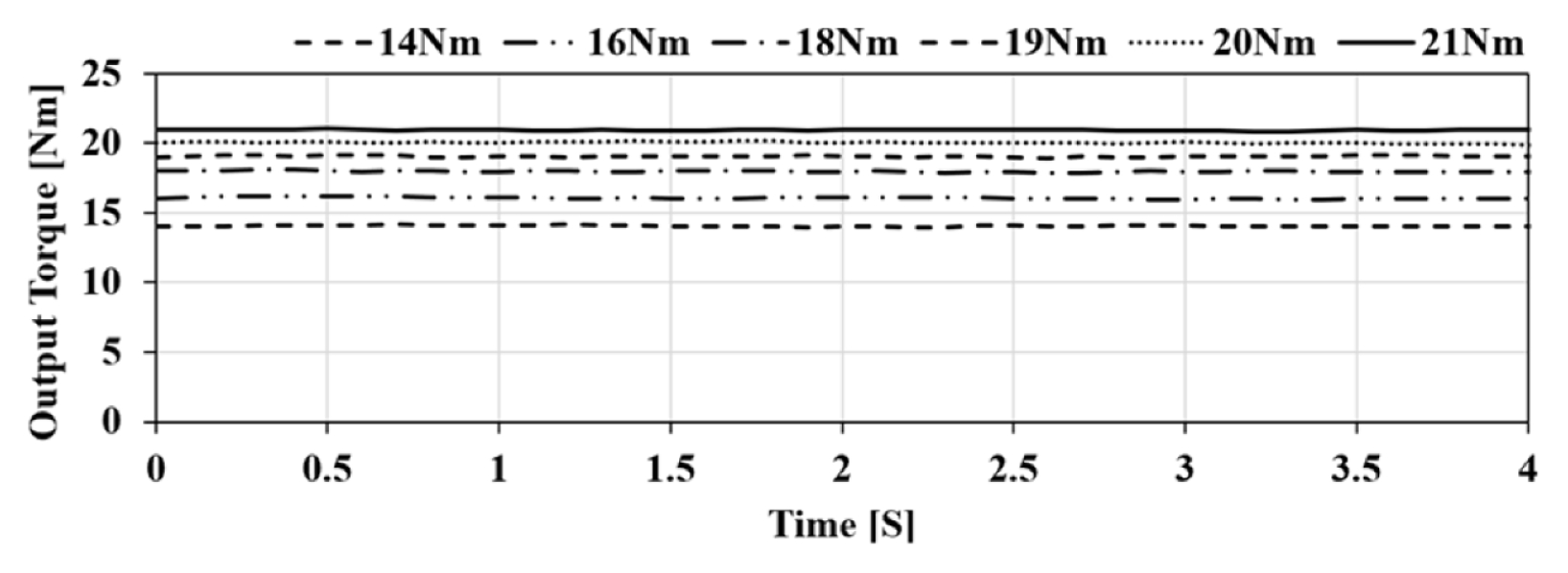
Fig. 9Efficiency test results of prototype MG model at 21 Nm peak operating points
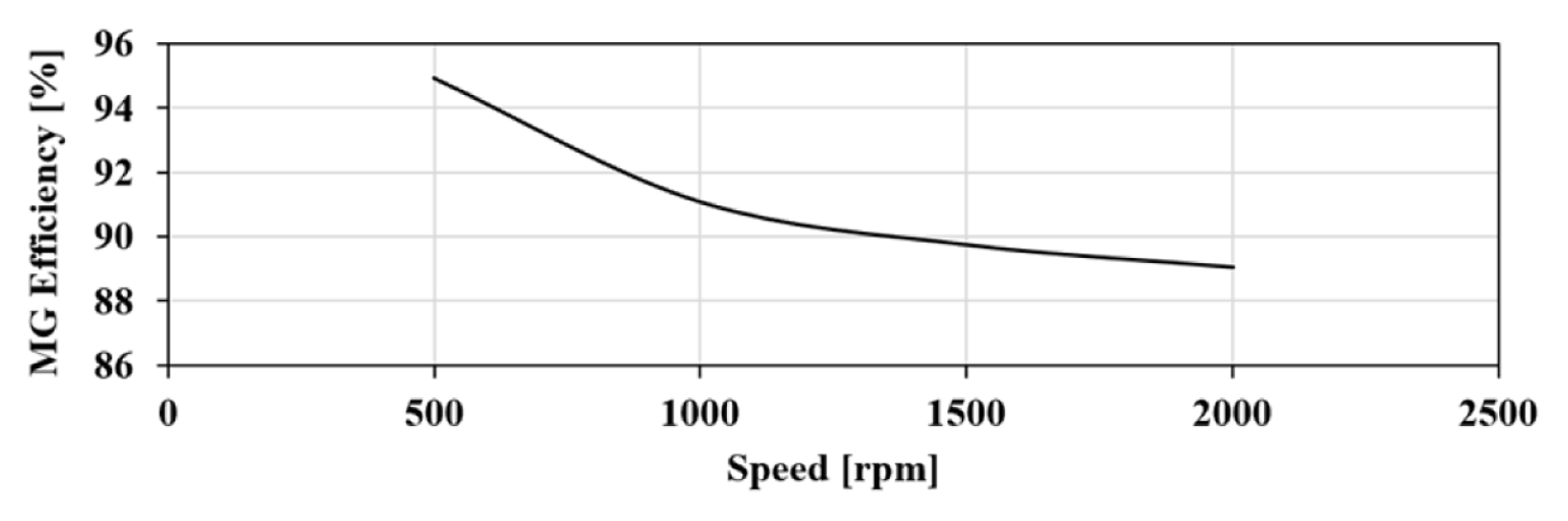
Table 1MG design parameter specifications
Table 1
|
Items |
Units |
Data |
|
No. of poles |
Inner rotor |
6 |
|
Outer stator |
76 |
|
Pole piece |
41 |
|
Core |
- |
20PN1500F |
|
Magnet |
- |
N52SH |
|
Gr |
- |
11.7 |
|
Max. Speed |
rpm |
2,000 |
|
Input torque |
Nm |
1.9 |
|
Output torque |
Nm |
26.5 |
|
Torque ripple |
% |
< 30 |
|
Max. Efficiency |
% |
> 95% |
|
Torque density |
kNm/m3
|
> 150 |
Table 2Objective faction of NSGA-II optimization algorithm
Table 2
|
Items |
Units |
Constraint type |
|
Output torque |
Nm |
Maximization |
|
Torque ripple |
% |
Minimization |
|
Total mass |
kg |
< 3kg |
|
Torque density |
kNm/m3
|
> 150 |
|
Efficiency |
% |
> 95 |
Table 3Design variable range of MG design parameter
Table 3
|
Items |
Units |
min |
Max. |
|
No. of generations |
- |
120 |
|
No. of population |
- |
50 |
|
Ri−i
|
mm |
55 |
65 |
|
Ri−o
|
mm |
60 |
70 |
|
Ro−i
|
mm |
70 |
75 |
|
Ro−o
|
mm |
80(Fix) |
|
θ
|
mm |
0 |
1 |
|
Rp−i
|
mm |
65 |
70 |
|
Rp−o
|
mm |
67 |
75 |
Table 4Results of topology optimization for MG
Table 4
|
Items |
Units |
Optimization results |
|
Ri−i/Ri−o
|
mm |
58.9/66.2 |
|
Ro−i/Ro−o
|
mm |
72.3/80 |
|
Rp−i/Rp−o
|
mm |
67/71.5 |
|
θ
|
mm |
0.35 |
|
Torque (in/out) |
Nm |
1.9/26.8 |
|
Torque ripple |
% |
18 |
|
Torque density |
kNm/m3
|
135 |
|
Analysis speed |
rpm |
2,000 |
|
3D FEM efficiency |
% |
98.9 |
Table 5Results of topology optimization for MG
Table 5
|
Items |
Units |
Points |
|
Speed |
Rpm |
500, 1000, 1500, 2000 |
|
Load torque |
Nm |
14, 16, 18, 19, 20, 21 |
REFERENCES
- 1. Koo, Y. D., (2022), Collaborative robot market: Trends and market outlook. ASTI Market Insight.
- 2. Kim, T. S., (2023), A study on harmonic drive for rigid body concept design, M.Sc. Thesis, Chung-Ang University.
- 3. Park, E. J., (2020), A study on efficiency optimization and structural robustness improvement of magnetic gear for high-speed drive, Ph.D. Thesis, Chosun University.
- 4. Byun, B. S., Park, E. J., Jung, S. Y., Kim, Y. J., (2023), Application of permanent magnets according to electromagnetic magnetization direction of magnetic gear considering gear ratio conversion, Journal of the Korean Institute of Electrical Engineers, 72(11), 1366-1371.
- 5. Byun, B. S., Park, E. J., Kim, Y. J., (2024), Torque ripple improvement of gear ratio variable magnetic gear through pole-piece deformation, Journal of the Korea Institute of Electronic Communication Sciences, 19(1), 77-84.
- 6. Song, H. G., Lee, E. G., Lee, T. Y., Jung, S. H., (2023), Disturbance observer-based torque control of coaxial magnetic gear and tool change module application, Proceedings of the 38th ICROS Annual Conference. 54-55.
- 7. Atallah, K., Howe, D., (2002), A novel high-performance magnetic gear, IEEE Transactions on Magnetics, 37(4), 2844-2846.
- 8. Yoon, J. H., Lee, J. S., Kim, D. W., (2014), Feature selection in multi-label classification problem using NSGA-II algorithm, Journal of KIISE: Software and Applications, 40(3), 133-140.
- 9. Hua, Y., Zhu, H., Gao, M., Ji, Z., (2020), Multiobjective optimization design of permanent magnet assisted bearingless synchronous reluctance motor using Nsga-II, IEEE Transactions on Industrial Electronics, 68(11), 10477-10487.
- 10. Hameyer, K., Henrotte, F., Sande, H., Deliège, G., De Gersem, H., (2002), Finite element models in electrical machine design, Proceedings of the Vth Congresso Brasileiro de Electromagnetismo (CBMag).
- 11. Desvaux, M., Multon, B., Sire, S., Ahmed, H. B., (2017), Analytical iron loss model for the optimization of magnetic gear, Proceedings of the IEEE International Electric Machines and Drives Conference (IEMDC). 1-8.
- 12. Atallah, K., Howe, D., (2002), A novel high-performance magnetic gear, IEEE Transactions on Magnetics, 37(4), 2844-2846.
Biography
- Jin-Seok Kim
Senior Researcher at the Korea Electronics Technology Institute. His research interests include the optimal robust topology design of electric machines, focusing on the performance, efficiency, and reliability of electric propulsion systems for EV and robotics.
- Rae-Eun Kim
He is currently a Principal Researcher with the Korea Electronics Technology Institute. His research interests include optimal design of electric machines and measurement of motor performance.
- Jung-Moo Seo
He currently serves as the Director of the Advanced Electrification System Research Center at the Korea Electronics Technology Institute. His research interests are in electric drive systems, thermo-fluid engineering, and energy management systems.